Infrared Optical Observability of an Earth Entry Orbital Test Vehicle Using Ground-Based Remote Sensors


Abstract
:
1. Introduction
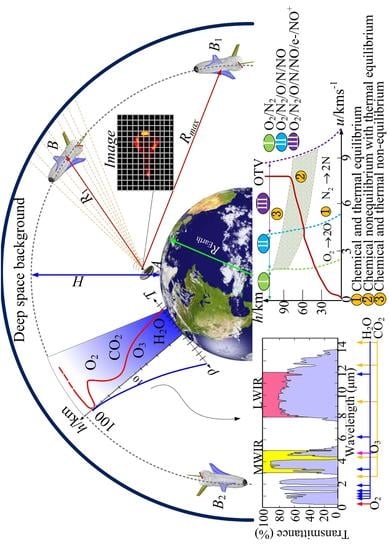
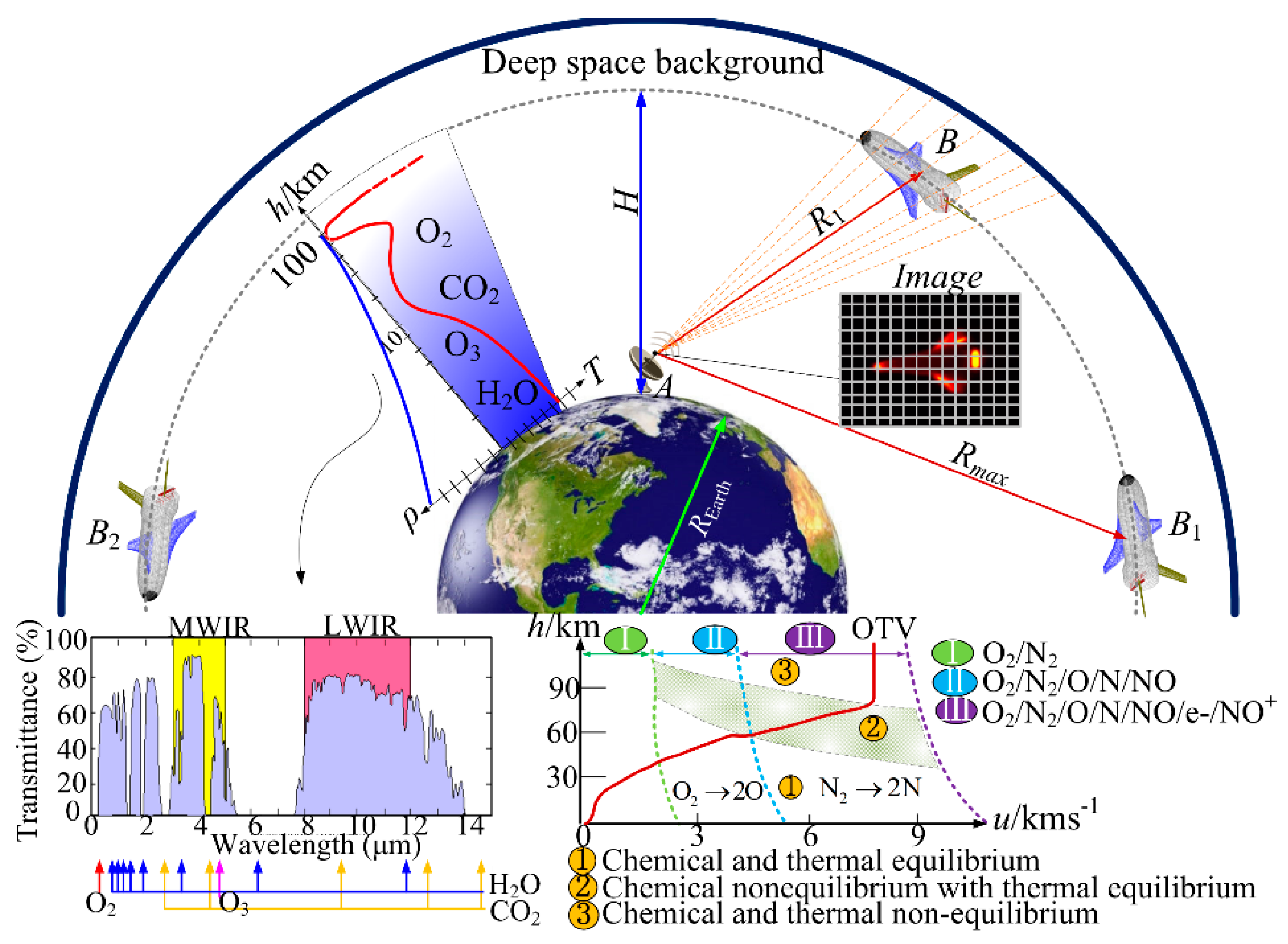
2. Description of Physical Processes in Ground-Based Observation
3. Computational Methods
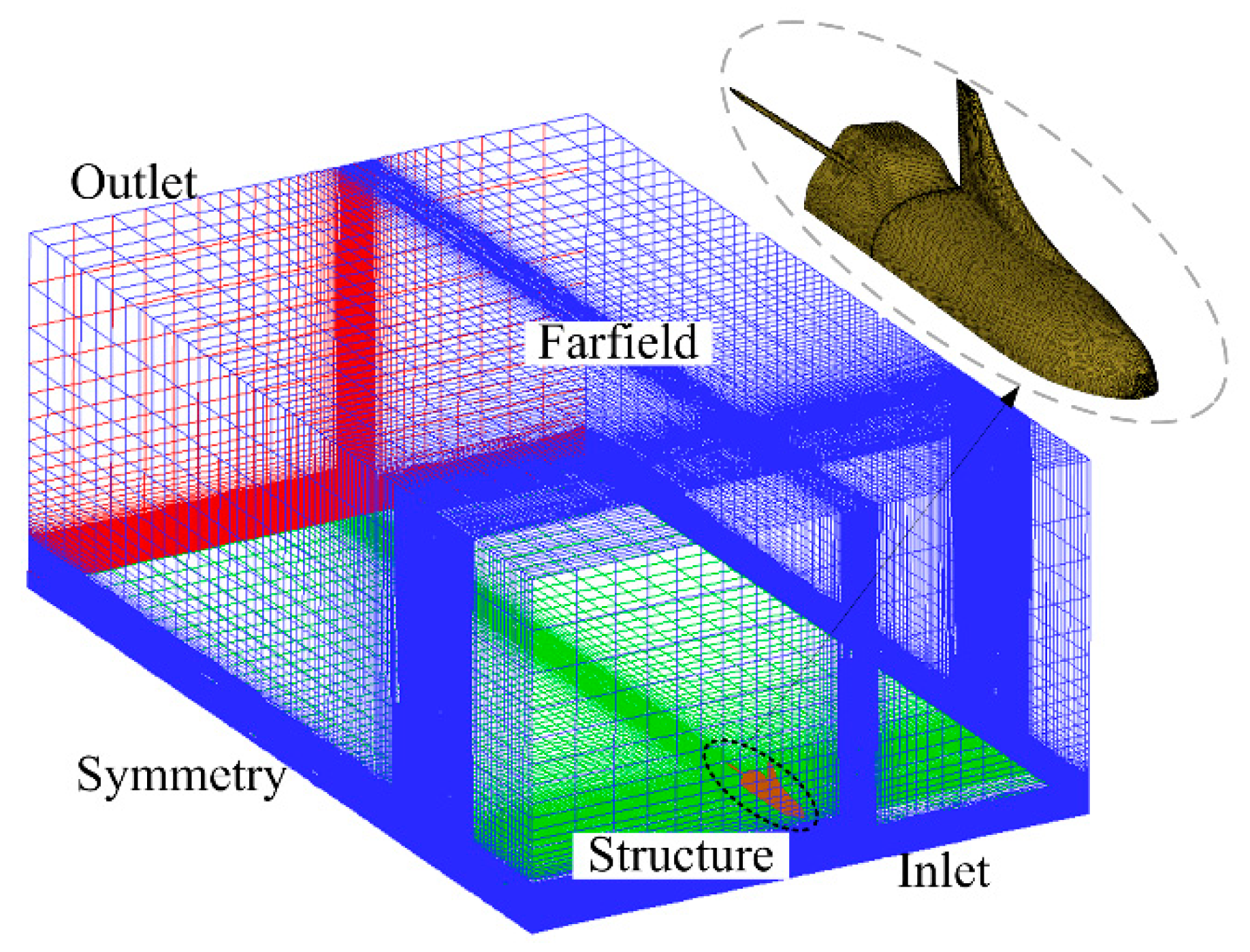
3.1. Description of CFD Solver
3.2. Optical Radiation and Transfer Models
3.2.1. Optical Radiative Properties of High-Temperature Gases
3.2.2. Optical Radiative Properties of High-Temperature Surfaces
3.3. Infrared Optical Observability of Ground-Based Sensors
3.3.1. Detection Range Model
3.3.2. Atmospheric Transmittance and Radiance
3.3.3. TIR Smoothing Distribution on the Sensor Aperture
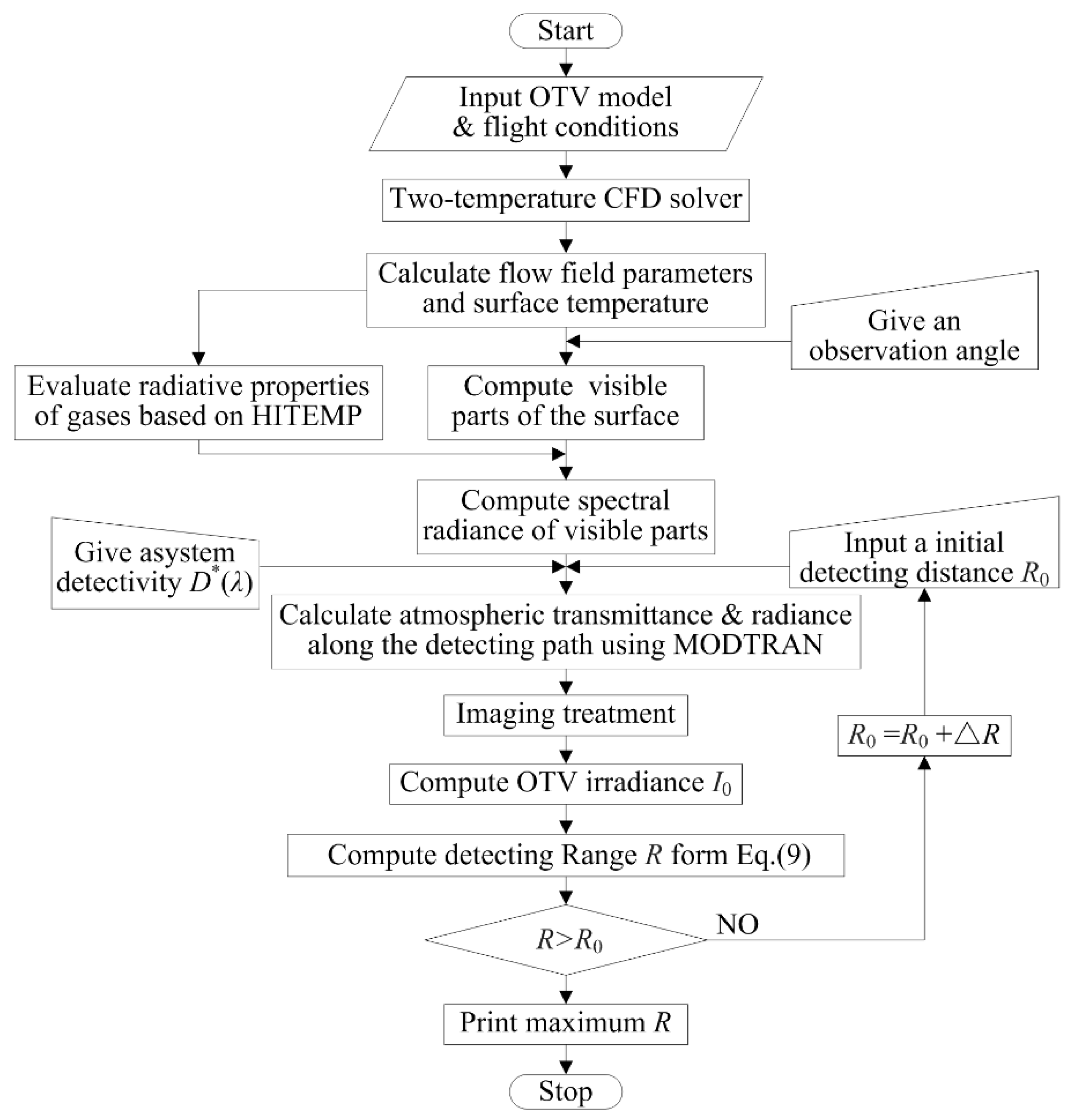
3.4. Computational Flow Chart of MDR
3.5. Validations of Physical Models
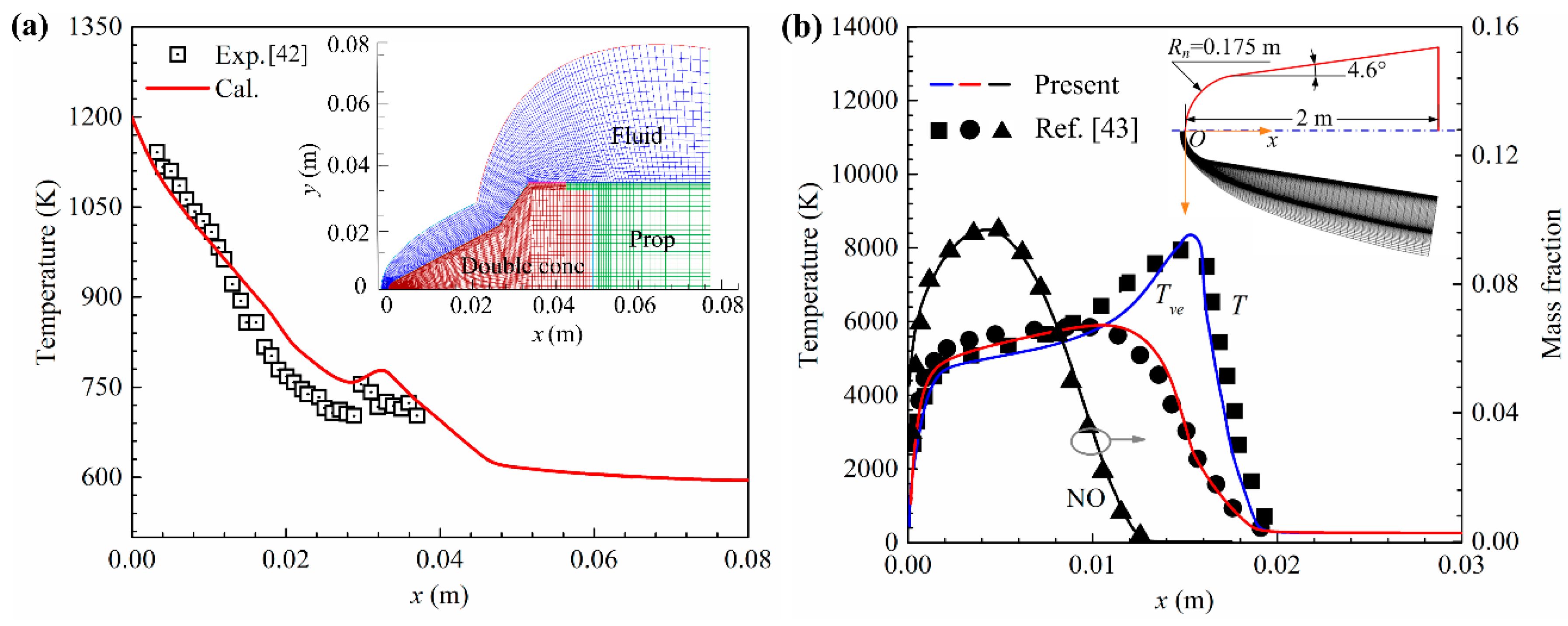
3.5.1. Validations of Surface Temperature and Flow Field Parameters
3.5.2. Validations of High-Temperature Optical Radiative Properties
3.5.3. Validations of Infrared Optical Observability
4. Results
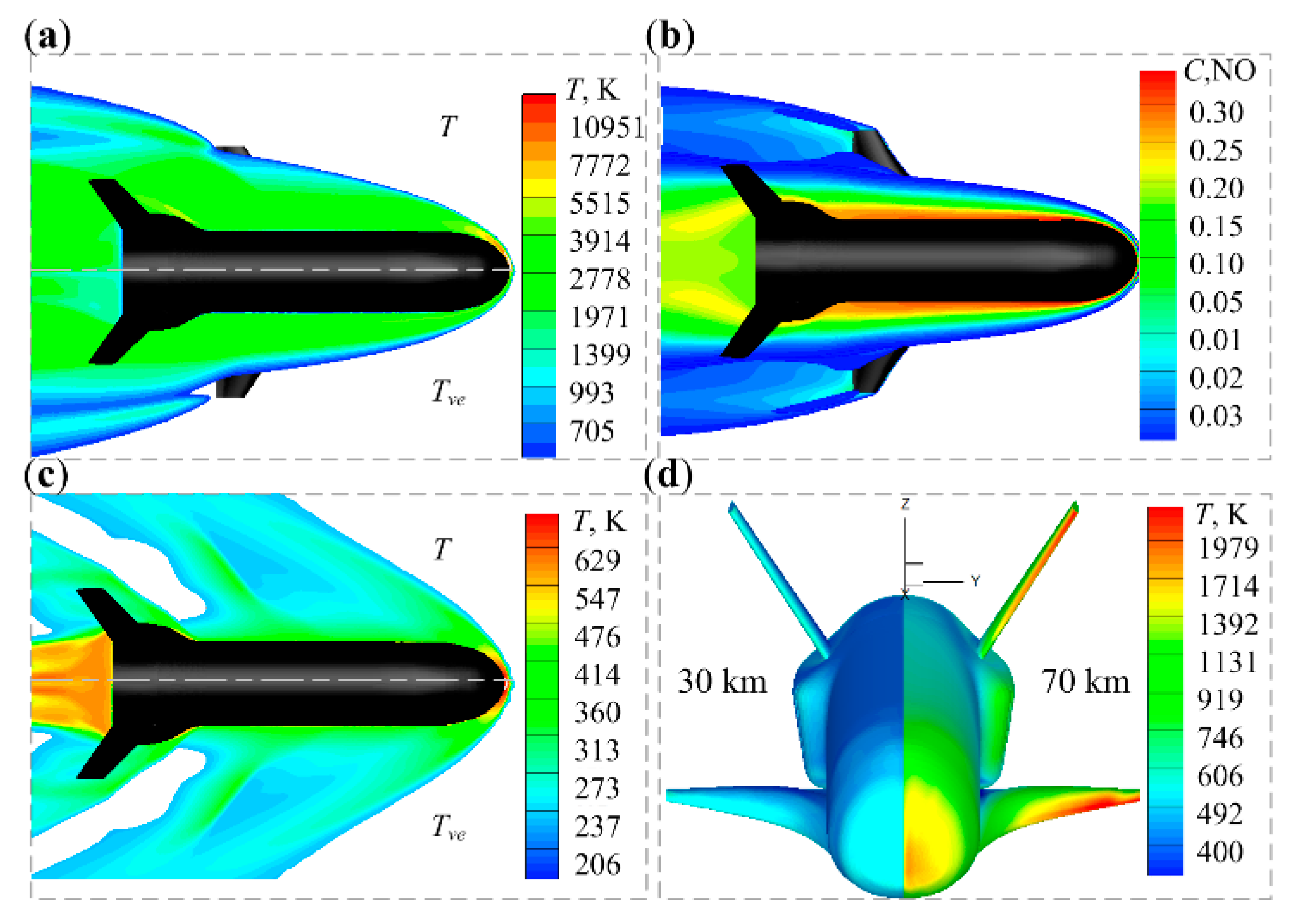
4.1. Thermal–Optical Flow Field
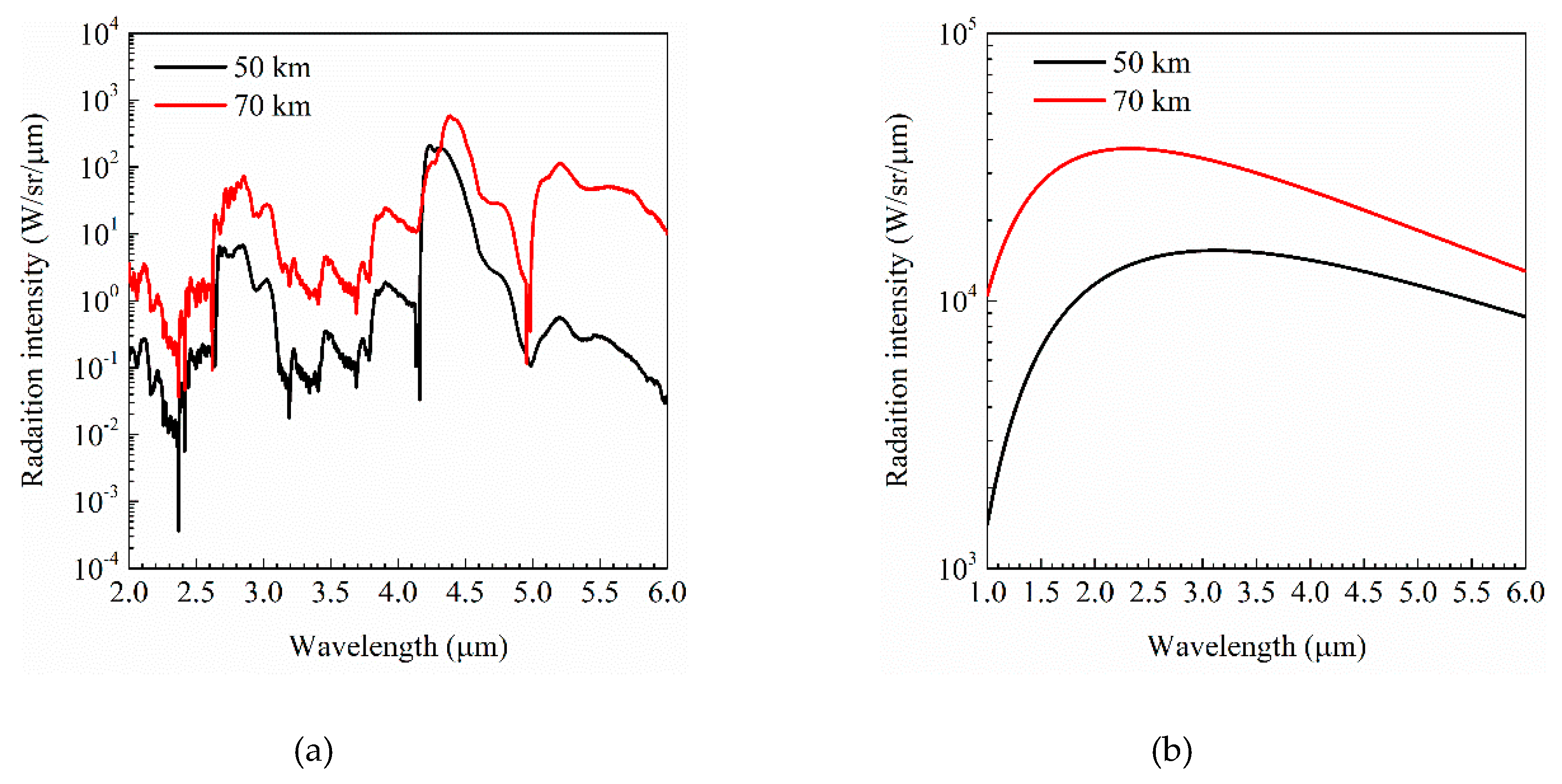
4.2. Self-Emission of OTV
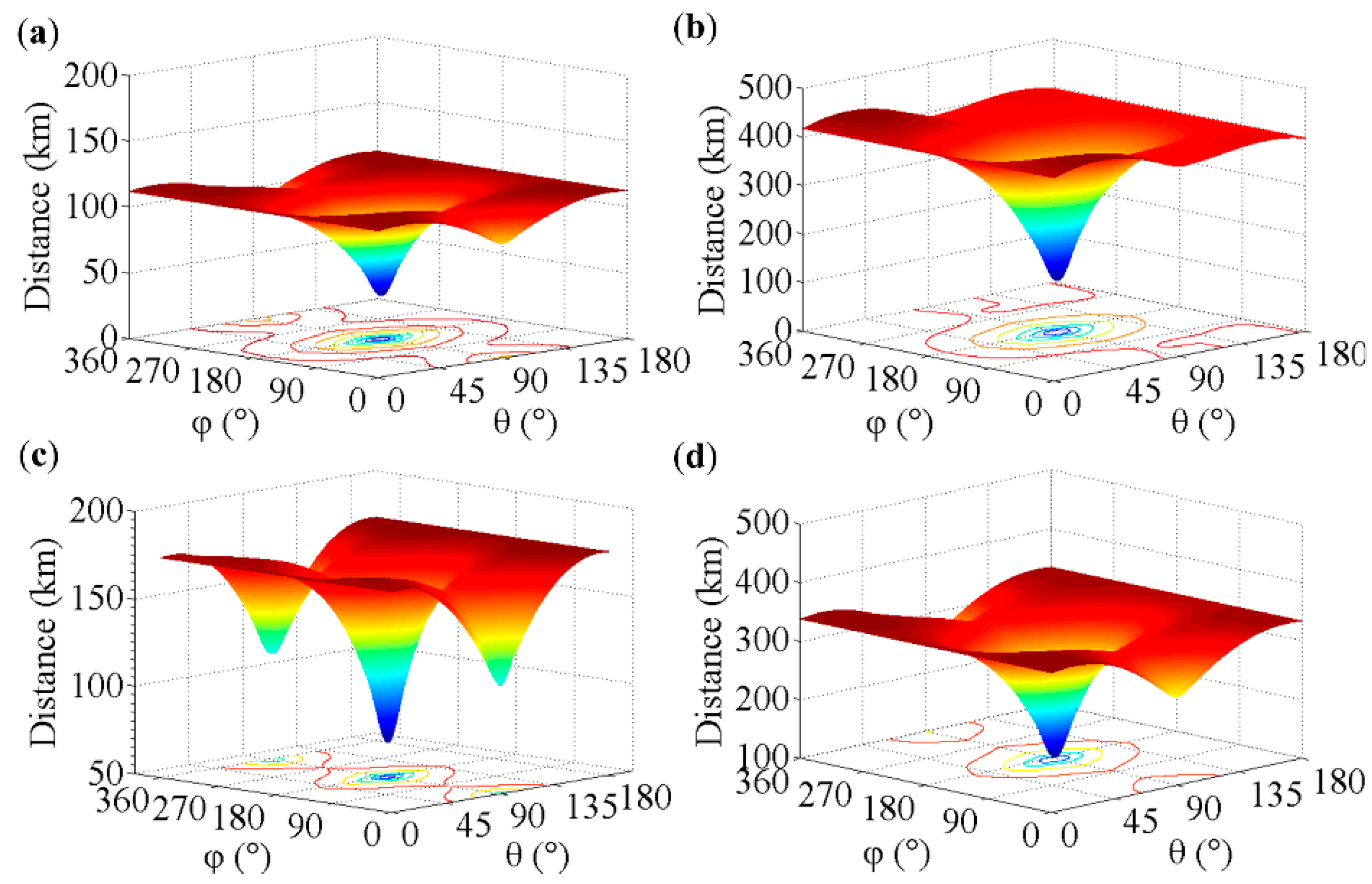
4.3. Detecting Distance of the Ground-Based Sensor
4.4. Effect of Sensor Detectivity on MDR
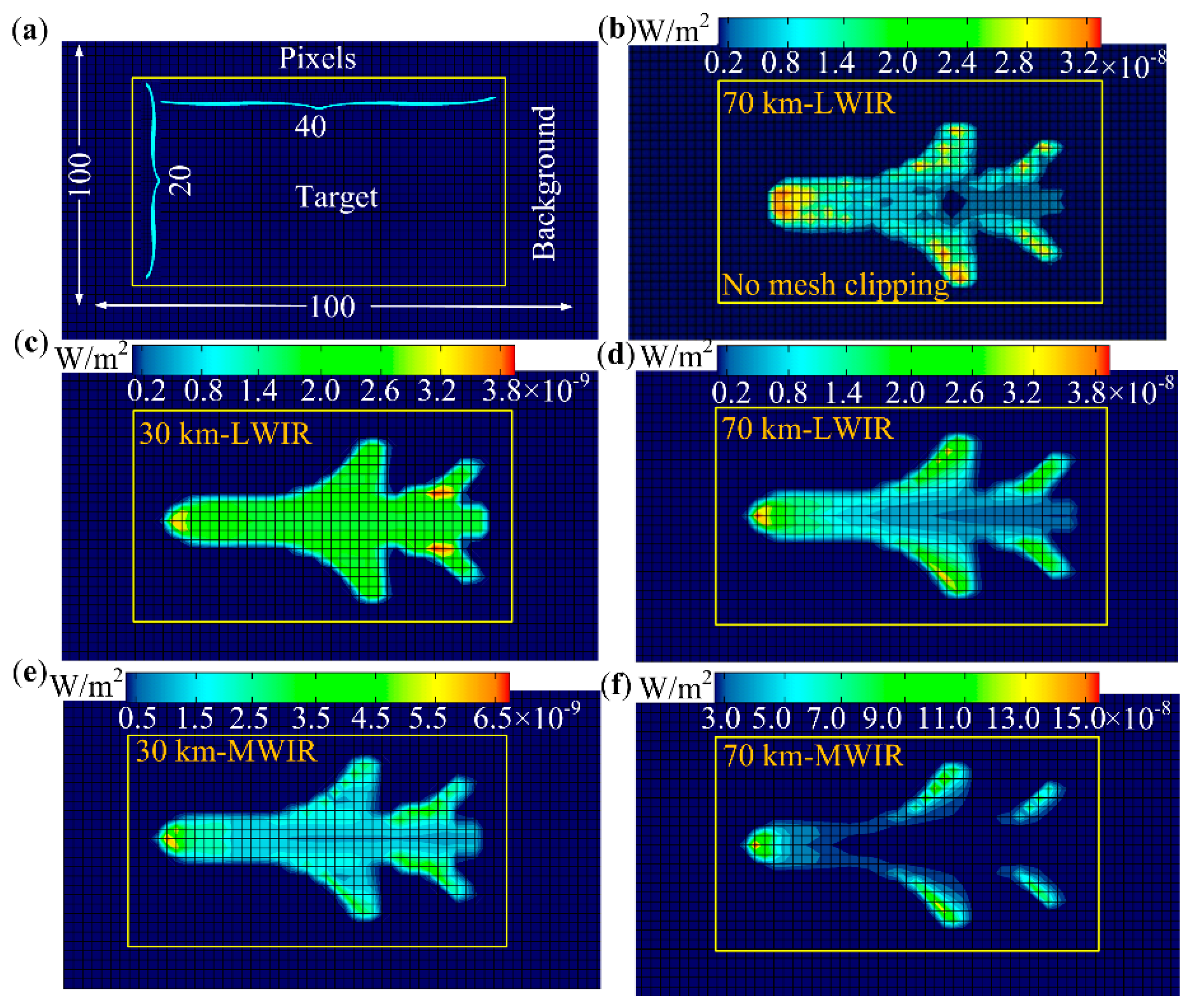
4.5. Infrared Optical Image of the Sensor
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| A0 | pupil area of the objective lens system, m2 |
| Ad | pixel area of the detector, m2 |
| Ai,j,k | visible area of the kth surface element in the i × j pixel, m2 |
| At | effective radiation area of the target surface, m2 |
| c | speed of light, 2.99979 × 108 m/s |
| C1, C2 | first and second radiation constants |
| d | degeneracy factors for state |
| D*(λ) | normalized system detectivity |
| El | energy of the lower state |
| Δf | frequency bandwidth of the detector circuitry |
| Frot | term value of rotational state |
| g | photoconductive gain |
| Gvib | term value of vibrational state |
| h | Planck constant, 6.6206896 × 10−34 J·s |
| kB | Boltzmann constant, 1.38064852 × 10−23 J·K−1 |
| I | radiation intensity, W/(sr·m2·μm) |
| M | number of segments in optical path |
| N | number density of species |
| ni | outward normal of the target surface element Ai |
| P | spectrum intensity arrived at the detector, W/(sr·μm) |
| Q(T) | partition function |
| R | distance between the target and the detector, m |
| q | irradiance received by each detector pixel, W/m2 |
| s | position |
| s | optical path vector |
| S(Tref) | line intensity under the standard condition |
| Vi,p | pth vertex of the element Ai |
| Greek | |
| η | wave number, cm−1 |
| Φ | line shape function |
| ε | emissivity |
| λ | wavelength, μm |
| τ(λ,R) | atmospheric transmittance with a distance of R |
| τ0(λ) | spectral transmittance of the optical system |
| Subscript | |
| u, l | upper and lower limits of spectral band |
| tar | target |
| bg | background |
| a | atmospheric air |
| s | surface of aircraft |
Abbreviation
| ASL | above sea level |
| AOA | angle of attack |
| CFD | computational fluid dynamics |
| FVM | finite volume method |
| FOV | field of view |
| HYTHIRM | hypersonic thermodynamic IR measurements |
| LOS | line-of-sight |
| LWIR | long-wavelength infrared |
| MDR | maximum detecting range |
| non-LTE | local thermodynamic nonequilibrium |
| NEFD | noise equivalent flux density |
| OTV | orbital test vehicle |
| RTE | radiative transfer equation |
| TIR | thermal infrared |
| SRC | sample return capsule |
| SNR | signal-to-noise ratio |
| SRR | strong receiving region |
| STS | space transportation system |
References
- Sziroczak, D.; Smith, H. A review of design issues specific to hypersonic flight vehicles. Prog. Aerosp. Sci. 2016, 84, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Grantz, A. X-37B orbital test vehicle and derivatives. In Proceedings of the AIAA SPACE 2011 Conference & Exposition, Long Beach, CA, USA, 27–29 September 2011; p. 7315. [Google Scholar]
- Stark, B.; Smith, B.; Chen, Y. Survey of thermal infrared remote sensing for Unmanned Aerial Systems. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 1294–1299. [Google Scholar]
- Gong, M.; Guo, R.; He, S.; Wang, W. IR radiation characteristics and operating range research for a quad-rotor unmanned aircraft vehicle. Appl. Opt. 2016, 55, 8757–8762. [Google Scholar] [CrossRef]
- Niu, Q.; He, Z.; Dong, S. Prediction of shock-layer ultraviolet radiation for hypersonic vehicles in near space. Chin. J. Aeronaut. 2016, 29, 1367–1377. [Google Scholar] [CrossRef] [Green Version]
- Niu, Q.; Yuan, Z.; Dong, S.; Tan, H. Assessment of nonequilibrium air-chemistry models on species formation in hypersonic shock layer. Int. J. Heat Mass Transf. 2018, 127, 703–716. [Google Scholar] [CrossRef]
- Bonin, J.; Mundt, C. Full Three-Dimensional Monte Carlo Radiative Transport for Hypersonic Entry Vehicles. J. Spacecr. Rocket. 2018, 56, 1–9. [Google Scholar] [CrossRef]
- Rao, A.G.; Mahulikar, S.P. Effect of atmospheric transmission and radiance on aircraft infared signatures. J. Aircr. 2005, 42, 1046–1054. [Google Scholar] [CrossRef]
- Mahulikar, S.P.; Sonawane, H.R.; Rao, G.A. Infrared signature studies of aerospace vehicles. Prog. Aerosp. Sci. 2007, 43, 218–245. [Google Scholar] [CrossRef]
- Baranwal, N.; Mahulikar, S.P. Aircraft engine’s infrared lock-on range due to back pressure penalty from choked convergent nozzle. Aerosp. Sci. Technol. 2014, 39, 377–383. [Google Scholar] [CrossRef]
- Pan, X.; Wang, X.; Wang, R.; Wang, L. Infrared radiation and stealth characteristics prediction for supersonic aircraft with uncertainty. Infrared Phys. Technol. 2015, 73, 238–250. [Google Scholar] [CrossRef]
- Huang, W.; Ji, H. Effect of environmental radiation on the long-wave infrared signature of cruise aircraft. Aerosp. Sci. Technol. 2016, 56, 125–134. [Google Scholar] [CrossRef]
- Beier, K.; Gemperlein, H. Simulation of infrared detection range at fog conditions for enhanced vision systems in civil aviation. Aerosp. Sci. Technol. 2004, 8, 63–71. [Google Scholar] [CrossRef]
- Wang, K.; Dickinson, R.E. Global atmospheric downward longwave radiation at the surface from ground-based observations, satellite retrievals, and reanalyses. Rev. Geophys. 2013, 51, 150–185. [Google Scholar] [CrossRef]
- Horvath, T.J.; Cagle, M.F.; Gibson, D. Remote observations of reentering spacecraft including the space shuttle orbiter. IEEE Aerosp. Conf. 2013. [Google Scholar] [CrossRef]
- Spisz, T.S.; Taylor, J.C.; Kennerly, S.W.; Osei-Wusu, K.; Gibson, D.M.; Horvath, T.J.; Zalameda, J.N.; Kerns, R.V.; Shea, E.J.; Mercer, C.D. Processing ground-based near-infrared imagery of space shuttle re-entries. In Proceedings of Thermosense: Thermal Infrared Applications XXXIV; Proc. SPIE: Baltimore, MD, USA, 2012; p. 83540G. [Google Scholar]
- Horvath, T.J.; Rufer, S.J.; Schuster, D.M.; Mendeck, G.F.; Oliver, A.B.; Schwartz, R.J.; Verstynen, H.A.; Mercer, C.D.; Tack, S.; Ingram, B. Infrared Observations of the Orion Capsule During EFT-1 Hypersonic Reentry. In Proceedings of the AIAA Aviation and Aerospace Forum and Exposition, Washington, DC, USA, 13 June 2016; pp. 1–23. [Google Scholar]
- Schuster, D.M.; Horvath, T.J.; Schwartz, R.J. Remote Imaging of Exploration Flight Test-1 (EFT-1) Entry Heating Risk Reduction; Report: NASA/TM-2016-219214; NASA Langley Research Center: Hampton, VA, USA, 1 June 2016.
- Snively, J.B.; Taylor, M.J.; Jenniskens, P.; Winter, M.W.; Kozubal, M.J.; Dantowitz, R.F.; Breitmeyer, J. Near-Infrared Spectroscopy of Hayabusa Sample Return Capsule Reentry. J. Spacecr. Rocket. 2014, 51, 424–429. [Google Scholar] [CrossRef]
- Huang, F.; Wang, Y.; Shen, X.; Li, G.; Yan, S. Analysis of space target detection range based on space-borne fisheye imaging system in deep space background. Infrared Phys. Technol. 2012, 55, 475–480. [Google Scholar] [CrossRef]
- Zhao, Y.; Wu, P.; Sun, W. Calculation of infrared system operating distance by spectral bisection method. Infrared Phys. Technol. 2014, 63, 198–203. [Google Scholar] [CrossRef]
- Ren, K.; Tian, J.; Gu, G.; Chen, Q. Operating distance calculation of ground-based and air-based infrared system based on Lowtran7. Infrared Phys. Technol. 2016, 77, 414–420. [Google Scholar] [CrossRef]
- Suzuki, T.; Fujita, K.; Ando, K.; Sakai, T. Experimental study of graphite ablation in nitrogen flow. J. Thermophys. Heat Transf. 2008, 22, 382–389. [Google Scholar] [CrossRef]
- Lemal, A.; Jacobs, C.; Perrin, M.-Y.; Laux, C.; Tran, P.; Raynaud, E. Prediction of nonequilibrium air plasma radiation behind a shock wave. J. Thermophys. Heat Transf. 2015, 30, 197–210. [Google Scholar] [CrossRef]
- Mikula, D.; Holthaus, M.; Jensen, T.; Kubo, D.; Redgate, M. X-37 Flight Demonstrator system safety program and challenges. In Proceedings of the Space 2000 Conference and Exposition, Long Beach, CA, USA, 19–21 September 2000; p. 5073. [Google Scholar]
- Sarma, G. Physico–chemical modelling in hypersonic flow simulation. Prog. Aerosp. Sci. 2000, 36, 281–349. [Google Scholar] [CrossRef]
- Felton, M.; Gurton, K.; Pezzaniti, J.; Chenault, D.; Roth, L. Measured comparison of the crossover periods for mid-and long-wave IR (MWIR and LWIR) polarimetric and conventional thermal imagery. Opt. Express 2010, 18, 15704–15713. [Google Scholar] [CrossRef] [PubMed]
- Roe, P.L. Approximate Riemann solvers, parameter vectors, and difference schemes. J. Comput. Phys. 1981, 43, 357–372. [Google Scholar] [CrossRef]
- Yee, H.C. On Symmetric and Upwind TVD Schemes; NASA-TM-88325; NASA Langley Research Center: Washington, DC, USA, 1985. [Google Scholar]
- Khodabakhsh, A.; Ramaiah-Badarla, V.; Rutkowski, L.; Johansson, A.C.; Lee, K.F.; Jiang, J.; Mohr, C.; Fermann, M.E.; Foltynowicz, A. Fourier Transform and Vernier Spectroscopy with a Mid-Infrared Optical Frequency Comb. Proc. Opt. Nanostruct. Adv. Mater. Photovolt. 2016, 41, 2541–2544. [Google Scholar]
- Cadiou, E.; Dherbecourt, J.-B.; Raybaut, M.; Gorju, G.; Melkonian, J.-M.; Godard, A.; Pelon, J. Multiple-Species DIAL for H2O, CO2, and CH4 remote sensing in the 1.98–2.30 µm range. In Proceedings of the Laser Applications to Chemical, Security and Environmental Analysis, Orlando, FL, USA, 25–28 June 2018; p. LTu5C.5. [Google Scholar]
- Park, C. Nonequilibrium Hypersonic Aerothermodynamics; John Wiley & Sons: New York, NY, USA, 1989. [Google Scholar]
- Gamache, R.R.; Roller, C.; Lopes, E.; Gordon, I.E.; Rothman, L.S.; Polyansky, O.L.; Zobov, N.F.; Kyuberis, A.A.; Tennyson, J.; Yurchenko, S.N. Total internal partition sums for 166 isotopologues of 51 molecules important in planetary atmospheres: Application to HITRAN2016 and beyond. J. Quant. Spectrosc. Radiat. Transf. 2017, 203, 70–87. [Google Scholar] [CrossRef] [Green Version]
- Rothman, L.; Gordon, I.; Barber, R.; Dothe, H.; Gamache, R.; Goldman, A.; Perevalov, V.; Tashkun, S.; Tennyson, J. HITEMP, the high-temperature molecular spectroscopic database. J. Quant. Spectrosc. Radiat. Transf. 2010, 111, 2139–2150. [Google Scholar] [CrossRef]
- Banwell, C.N.; McCash, E.M. Fundamentals of Molecular Spectroscopy; McGraw-Hill: New York, NY, USA, 1994; Volume 851. [Google Scholar]
- Sparrow, E.M. Radiation Heat Transfer; Routledge: New York, NY, USA, 2018. [Google Scholar]
- Olivero, J.J.; Longbothum, R. Empirical fits to the Voigt line width: A brief review. J. Quant. Spectrosc. Radiat. Transf. 1977, 17, 233–236. [Google Scholar] [CrossRef]
- Niu, Q.; Yang, S.; He, Z.; Dong, S. Numerical study of infrared radiation characteristics of a boost-gliding aircraft with reaction control systems. Infrared Phys. Technol. 2018, 92, 417–428. [Google Scholar] [CrossRef]
- Fetter, S.; Sessler, A.M.; Cornwall, J.M.; Dietz, B.; Frankel, S.; Garwin, R.L.; Gottfried, K.; Gronlund, L.; Lewis, G.N.; Postol, T.A. Countermeasures: A Technical Evaluation of the Operational Effectiveness of the Planned US National Missile Defense System; Union of Concerned Scientist: Cambridge, MA, USA, 2000. [Google Scholar]
- Berk, A.; Bernstein, L.S.; Robertson, D.C. MODTRAN: A Moderate Resolution Model for LOWTRAN; Spectral Sciences Inc.: Burlington, MA, USA, 1987. [Google Scholar]
- Qinglin, N.; Zhichao, Y.; Biao, C.; Shikui, D. Infrared radiation characteristics of a hypersonic vehicle under time-varying angles of attack. Chin. J. Aeronaut. 2019, 32, 861–874. [Google Scholar]
- Ferrero, P.; D’Ambrosio, D. A numerical method for conjugate heat transfer problems in hypersonic flows. In Proceedings of the 40th Thermophysics Conference, Seattle, DC, USA, 23–26 June 2008; p. 4247. [Google Scholar]
- Mallet, M.; Periaux, J.; Rostand, P.; Stoufflet, B. Validation of aerodynamic simulation methods for Hermes spaceplane and future hypersonic vehicles. In Proceedings of the 4th Symposium on Multidisciplinary Analysis and Optimization, Cleveland, OH, USA, 21–23 September 1992. [Google Scholar]
- Hao, J.; Wang, J.; Lee, C. Numerical study of hypersonic flows over reentry configurations with different chemical nonequilibrium models. Acta Astronaut. 2016, 126, 1–10. [Google Scholar] [CrossRef]
- Levin, D.A.; Candler, G.V.; Limbaugh, C.C. Multispectral shock-layer radiance from a hypersonic slender body. J. Thermophys. Heat Transf. 2000, 14, 237–243. [Google Scholar] [CrossRef]
- Ozawa, T.; Garrison, M.B.; Levin, D.A. Accurate molecular and soot infrared radiation model for high-temperature flows. J. Thermophys. Heat Transf. 2007, 21, 19–27. [Google Scholar] [CrossRef]
- Richter, R.; Fries, J. Radiometric analysis of infrared sensor performance. Appl. Opt. 1988, 27, 4771–4776. [Google Scholar] [CrossRef] [PubMed]
- Alexeenko, A.; Gimelshein, N.; Levin, D.; Collins, R.; Rao, R.; Candler, G.; Gimelshein, S.; Hong, J.; Schilling, T. Modeling of flow and radiation in the Atlas plume. J. Thermophys. Heat Transf. 2002, 16, 50–57. [Google Scholar] [CrossRef]
- Qinglin, N.; Zhihong, H.; Shikui, D. IR radiation characteristics of rocket exhaust plumes under varying motor operating conditions. Chin. J. Aeronaut. 2017, 30, 1101–1114. [Google Scholar]
- Niu, Q.; Duan, X.; Meng, X.; He, Z.; Dong, S. Numerical analysis of point-source infrared radiation phenomena of rocket exhaust plumes at low and middle altitudes. Infrared Phys. Technol. 2019, 99, 28–38. [Google Scholar] [CrossRef]
- Shao, C.; Nie, L.; Chen, W. Analysis of weakly ionized ablation plasma flows for a hypersonic vehicle. Aerosp. Sci. Technol. 2016, 51, 151–161. [Google Scholar] [CrossRef]
- Coudrain, C.; Bernhardt, S.; Caes, M.; Domel, R.; Ferrec, Y.; Gouyon, R.; Henry, D.; Jacquart, M.; Kattnig, A.; Perrault, P. SIELETERS, an airborne infrared dual-band spectro-imaging system for measurement of scene spectral signatures. Opt. Express 2015, 23, 16164–16176. [Google Scholar] [CrossRef] [Green Version]
- Shibata, Y.; Nagasawa, C.; Abo, M. Development of 1.6 µm DIAL using an OPG/OPA transmitter for measuring atmospheric CO2 concentration profiles. Appl. Opt. 2017, 56, 1194–1201. [Google Scholar] [CrossRef]
- Meng, L.; Fix, A.; Wirth, M.; Høgstedt, L.; Tidemand-Lichtenberg, P.; Pedersen, C.; Rodrigo, P.J. Upconversion detector for range-resolved DIAL measurement of atmospheric CH4. Opt. Express 2018, 26, 3850–3860. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values | ||||||
|---|---|---|---|---|---|---|---|
| h, km | 10 | 20 | 30 | 40 | 50 | 60 | 70 |
| p∞, Pa | 26,500 | 5529 | 1197 | 287 | 79 | 22 | 5 |
| T∞, K | 223 | 216 | 226 | 250 | 271 | 247 | 220 |
| u∞, km/s | 0.22 | 0.38 | 0.98 | 1.81 | 2.84 | 4.51 | 6.10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, Q.; Meng, X.; He, Z.; Dong, S. Infrared Optical Observability of an Earth Entry Orbital Test Vehicle Using Ground-Based Remote Sensors. Remote Sens. 2019, 11, 2404. https://doi.org/10.3390/rs11202404
Niu Q, Meng X, He Z, Dong S. Infrared Optical Observability of an Earth Entry Orbital Test Vehicle Using Ground-Based Remote Sensors. Remote Sensing. 2019; 11(20):2404. https://doi.org/10.3390/rs11202404
Chicago/Turabian StyleNiu, Qinglin, Xiaying Meng, Zhihong He, and Shikui Dong. 2019. "Infrared Optical Observability of an Earth Entry Orbital Test Vehicle Using Ground-Based Remote Sensors" Remote Sensing 11, no. 20: 2404. https://doi.org/10.3390/rs11202404
APA StyleNiu, Q., Meng, X., He, Z., & Dong, S. (2019). Infrared Optical Observability of an Earth Entry Orbital Test Vehicle Using Ground-Based Remote Sensors. Remote Sensing, 11(20), 2404. https://doi.org/10.3390/rs11202404