3.1. Overall Description of DUMD
When establishing the unidirectional pyramid of stripe image
, the large-scale stripes are saved in the highest layer
, and the small-scale stripes are saved in difference maps. The difference map of the
layer is written as
and is defined as:
where
and
both need to be resampled to have the same size as
. The CMVs of
are denoted
, and the corresponding destriped CMVs are denoted
, respectively. The CMVs of
are denoted
, and the corresponding destriped CMVs are denoted
, respectively. Extending Equation (4), we obtained:
Equation (5) illustrates that can be obtained from and and does not have to use . Moreover, can be obtained from the downsampling of (the CMV of ) and does not have to use . Therefore, only needs to be calculated from two-dimensional data, while the other CMVs (,) are all calculated from one-dimensional data; this feature can greatly reduce the amount of calculation.
In
Section 2.1, the destriping problem was converted into the CMV estimation of the no-stripe image. Therefore, the destriped image
can be expressed as:
In Equation (6), the destriping problem has been converted into the problem of seeking
and
. The small-scale stripes are saved in
, which is eliminated by
. Small-scale stripes are easy to process, and we have designed a filter
to remove them. Assuming
and
(where
is a one-dimensional smooth kernel), the filter can be expressed as:
where
is a threshold used to judge small-scale stripe noise;
was set at 1 in this paper.
The large-scale stripes are saved in
, which is eliminated by
. Large-scale stripes are difficult to process; this difficulty was the main issue addressed in this paper. The CCNUC framework was applied to obtain
; this process has been described more thoroughly in
Section 3.2. However, the cumulative error produced by CCNUC cannot be ignored, and additional measures must be applied for suppression. These cumulative error suppression measures are described in
Section 3.3,
Section 3.4 and
Section 3.5.
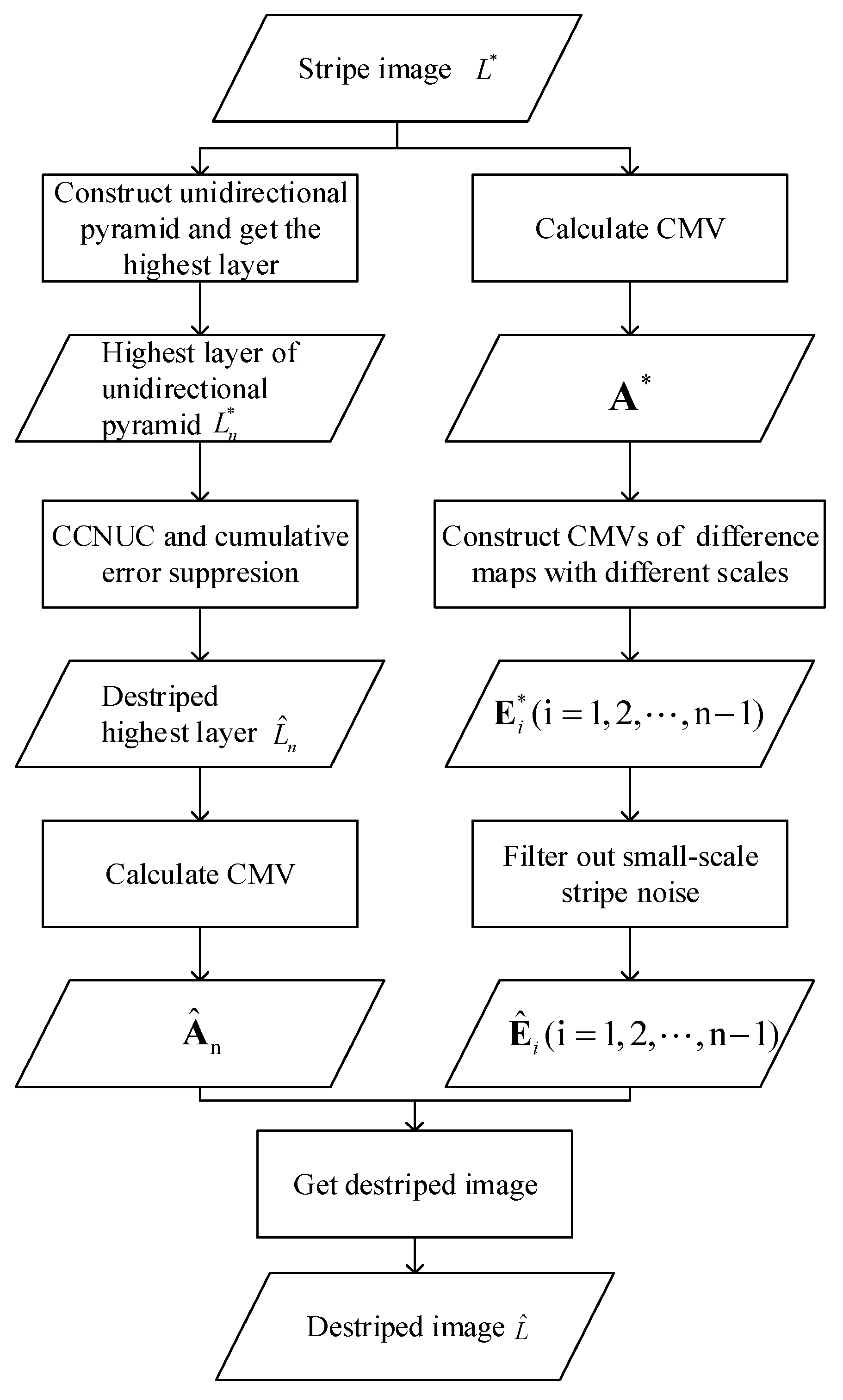
In summary, the overall process of the DUMD algorithm is shown in
Figure 2, and mainly includes five steps:
(1) A unidirectional pyramid of the stripe image is constructed, and the highest layer is obtained.
(2) CCNUC and cumulative error suppression measures are performed on to obtain the destriped layer and the corresponding CMV .
(3) In accordance with Equation (5), are obtained by resampling and difference.
(4) In accordance with Equation (7), are obtained by removing small-scale stripes.
(5) In accordance with Equation (6), the final destriped image is obtained by combining , , and .
3.2. The Framework of Column-by-Column Nonuniformity Correction (CCNUC)
Remote sensing images have spatial similarity, and any two random adjacent columns should have similar statistical characteristics. Because of this feature, the stripe image can be corrected by CCNUC with various methods. In
Section 2.1, the destriping problem was converted into the problem of estimating the CMV of the no-stripe image, so the stripe noise can be removed by calculating the deviation between adjacent columns. The CCNUC framework can be expressed as:
where
is the
column of the destriped image,
is the adjustment coefficient between
and
, and
is a function that calculates the adjustment coefficient between two columns. The adjustment coefficient
can be divided into two parts: the accurate part (denoted
) and the error term (denoted
). There is a cumulative error
between the estimated column
and the real column
:
In Equation (9), the role of is to normalize . Therefore, the intensity of is positively correlated with the number of accumulations and the magnitude of the single adjustment error .
The cumulative error is an unavoidable problem of the CCNUC framework. In the image, the cumulative error appears as a color cast on the destriped image. The farther the error is from the initial column, the more serious the color cast. In the CMV, the cumulative error appears as an overall offset. The farther the error is from the initial point, the larger the offset. There are three steps that can be taken to compensate for the cumulative error produced by CCNUC:
(1) Reduce the number of error accumulations. By Equation (9), the intensity of
is positively correlated with
. Reducing the size of
is the most effective way to suppress the cumulative error. When the unidirectional pyramid of stripe image
is established, only the highest layer
is processed by CCNUC. In this way, the cumulative number can be reduced from
to
. This step has been described in more detail in
Section 3.3.
(2) Improve the accuracy of the single deviation estimation of adjacent columns (i.e., reduce the value of the single adjustment error
). The cumulative error comes from the accumulation of multiple tiny errors, so improving the accuracy of every deviation estimation is also an effective suppression method. The size of
is related to the samples and the calculation method. The least-square method (LSM) is the most common method for calculating the linear relationship between two samples. However, its objective function is the root mean square error (RMSE), which is sensitive to extreme values (gross errors). If these extreme values cannot be excluded, the deviation estimation of the adjacent columns will be enlarged. Therefore, we proposed a deviation estimation method based on a normal distribution. This method can reduce the influence of extreme values and improve accuracy. This step has been described in more detail in
Section 3.4.
(3) Design a compensation measure for cumulative error. The adjustment error
cannot be measured, but it has the property of accumulation. Using this property, we could detect it on a larger scale and compensate for it. Recording the initial corrected
as
, decomposing
to a larger scale, and making the second adjustment by the same method will compensate for cumulative error to some extent. This step has been described in more detail in
Section 3.5.
3.3. Unidirectional Multiscale Decomposition
Because of their different causes, stripes have different scales. The stripes in the channel are small-scale and of low-intensity, and the stripes between channels are large-scale and of high-intensity. The unidirectional pyramid of stripe image is established by mean filtering with a filter size 1 × 3. All layers of the pyramid are resampled to the same size, and the difference maps are obtained by Equation (4). Then, the stripe image can be decomposed into the multiscale sets .
Each layer of the unidirectional pyramid can only contain stripes of the same scale or larger scale. Therefore, each layer of the multiscale sets can only retain stripes of the same scale. In other words, stripes are completely decomposed into multiscale sets without overlap; retains large-scale stripes, and retain small-scale stripes.
Stripes appear as two-dimensional signals in the image, but they can be completely and losslessly compressed into one-dimensional signals in the corresponding CMV. Similarly, the CMVs of () retain all the small-scale stripes, and the CMV of () retains all the large-scale stripes. Small-scale stripes can be eliminated by filtering . Therefore, only needs to be processed by CCNUC; this processing can reduce the error accumulation number from the original to the current .
In the CCNUC framework, the adjustment parameter is calculated by the statistical characteristics of the adjacent columns. The availability of the statistical characteristics depends on the number of samples. If the image is shrunk by the same factor in width and length, then the number of pixels in each column will be drastically reduced, and the reliability of the statistical characteristics cannot be guaranteed. Therefore, it is only necessary to shrink the image in a single direction (perpendicular to the stripe direction) in the process of establishing the pyramid.
3.4. Deviation Estimation of Adjacent Columns
The actual features of the remote sensing image change gradually, indicating that the remote sensing images have a spatial similarity. Therefore, the premise of the CCNUC framework is that two adjacent columns in the remote sensing image should have similar statistical characteristics. When the statistical characteristics of adjacent columns have large differences, it indicates that there are external factors causing systematic radiation deviation (e.g., existing stripe noise). The key issue of the CCNUC framework is how to measure the statistical characteristics of adjacent columns. If the mean and standard deviation are used as statistical indicators, CCNUC is equal to moment matching. If only the mean is used as a statistical indicator, CCNUC is equal to simplified moment matching, and its performance will be worse.
Stripe noise will cause a linear change in the columns. LSM is the most popular method for calculating the linear relationship between two sets of samples. Although the adjacent columns have similarities, they are not identical. There are a few differences between adjacent columns. These differences are caused by features and are especially noticeable in the high-gradient region. The object function of LSM is the RMSE of the two sets of samples, and this RMSE is susceptible to extreme values. Therefore, using LSM to estimate the deviation between adjacent columns will cause over-estimation (i.e., will increase the absolute value of ) and enlarge the cumulative error. Based on this consideration, this paper proposed a deviation estimation method based on the normal distribution, which could reduce the influence of extreme values and improve the robustness of the measurement.
If the radiation responses of two adjacent detectors are consistent, then the difference between the adjacent columns of their images can be considered to be caused by features. In this situation, the difference between the two adjacent columns should satisfy the zero-mean normal distribution:
where
is the difference between adjacent columns,
is the mean of the normal distribution, which is equal to 0, and
is the variance of the normal distribution. If the radiation responses of two adjacent detectors are inconsistent, the fitting Gaussian curve will shift and
. Therefore, the adjustment parameter can be obtained by measuring the mean of the Gaussian fitting curve of
:
where
is a function that calculates the adjustment parameter,
and
are two adjacent columns, and
is the threshold introduced to reduce the algorithm error; it was set to the median of
in this paper.
3.5. Cumulative Error Compensation
After has been processed by CCNUC once, the large-scale stripes have been filtered out. At this time, the initial destriped image retains the true information and the cumulative error. The cumulative error is the accumulation of the adjustment error in space. The single adjustment error cannot be measured, but it has the property of accumulation. Three columns of are denoted , , and , where . For and , the result of is completely untrustworthy. However, for and , the result of has a certain degree of confidence due to the cumulative nature of the error.
The value of
contains two parts: the difference in features and the cumulative error. Therefore,
has a certain cumulative error compensation effect. Since the two columns are not adjacent, the difference in features will be correspondingly larger, thereby reducing the compensation accuracy. Based on this consideration,
is downsampled again to obtain
, which is then processed by CCNUC to obtain
. Then, the final destriped layer
can be expressed as:
where
is the CMV of
,
is the CMV of
,
is a one-dimensional kernel, and
is the CMV of
, which has been resampled to be the same size as
.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}