High-Resolution and Accurate Topography Reconstruction of Mount Etna from Pleiades Satellite Data


 ,
,  , , and
, , and
Abstract
:
1. Introduction
2. Materials and Methods
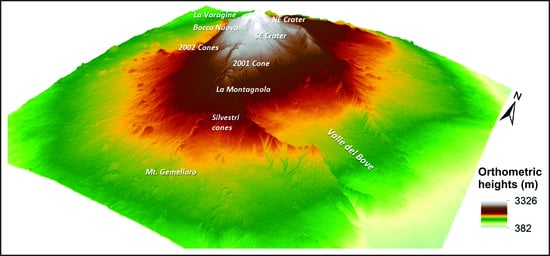
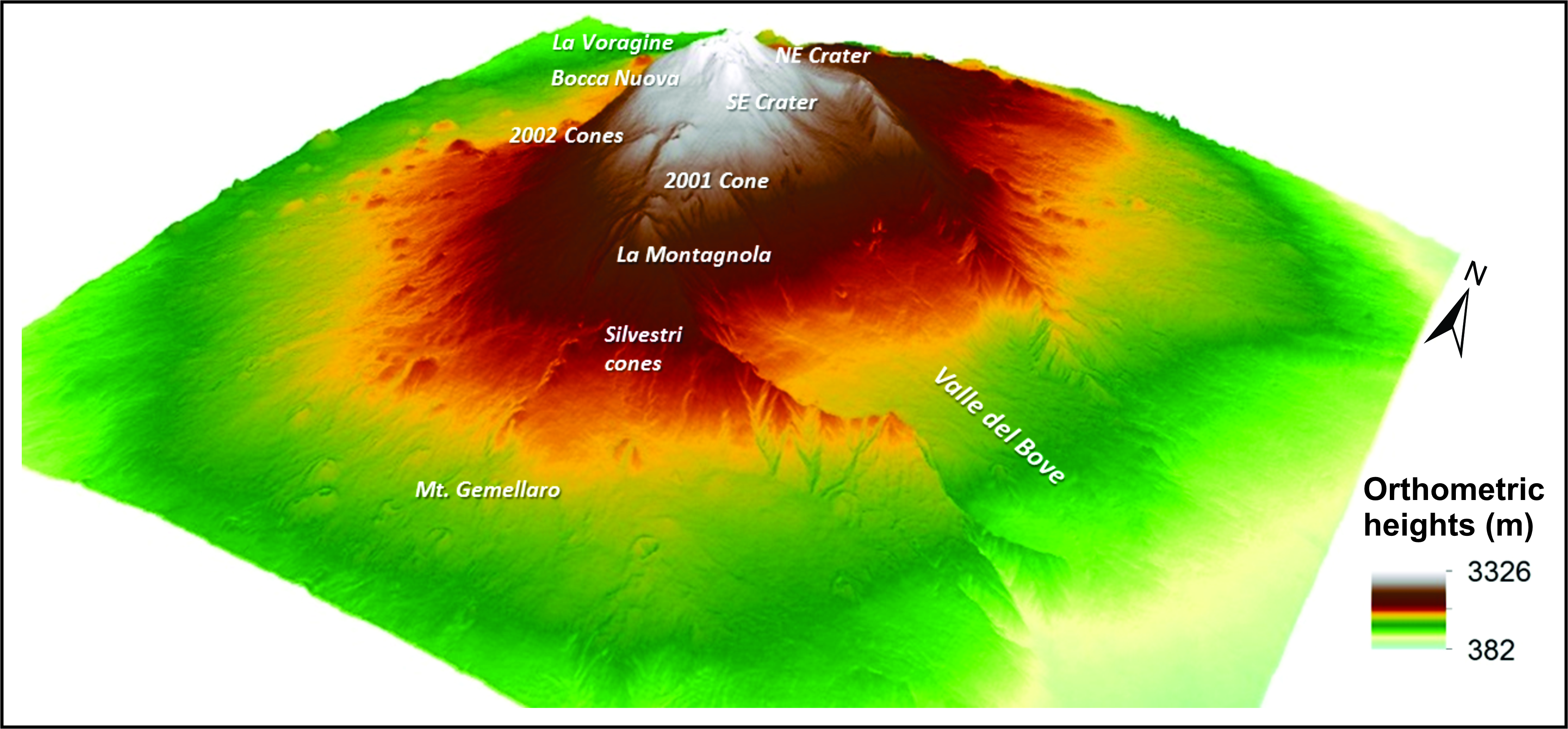
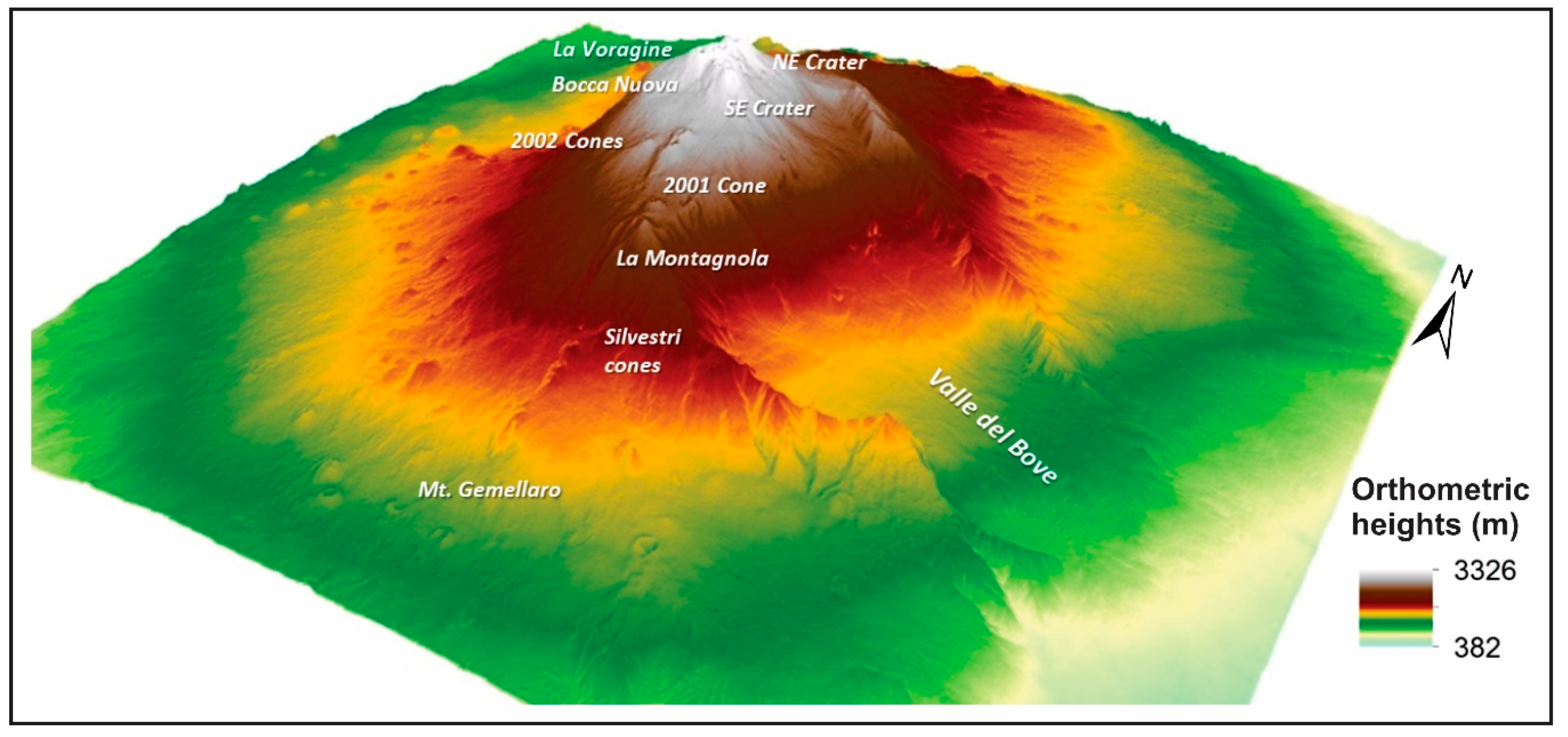
2.1. Study Area
2.2. Datasets
2.2.1. Pleiades Satellite Data
2.2.2. Light/Laser Detection and Ranging (Lidar) Derived Digital Elevation Models (DEMs)
2.2.3. Ground Control Points (GCPs) Dataset
2.3. Workflow and Methodology
2.3.1. Data Pre-Processing
2.3.2. Feature Matching
2.3.3. Topography Reconstruction
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bridge, J.; Demicco, R. Earth Surface Processes, Landforms and Sediment Deposits; Cambridge University Press: Binghamton, NY, USA, 2008. [Google Scholar]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Pelletier, J. Quantitative Modeling of Earth Surface Processes; Cambridge University Press: Binghamton, NY, USA, 2008. [Google Scholar]
- Mora, O.E.; Liu, J.; Gabriela Lenzano, M.; Toth, C.K.; Grejner-Brzezinska, D.A. Small landslide susceptibility and hazard assessment based on airborne lidar data. Photogramm. Eng. Remote Sens. 2015, 81, 239–247. [Google Scholar] [CrossRef]
- Lan, H.; Martin, C.D.; Zhou, C.; Lim, C.H. Rockfall hazard analysis using LiDAR and spatial modeling. Geomorphology 2010, 118, 213–223. [Google Scholar] [CrossRef]
- Casas, A.; Riaño, D.; Greenberg, J.; Ustin, S. Assessing levee stability with geometric parameters derived from airborne LiDAR. Remote Sens. Environ. 2012, 117, 281–288. [Google Scholar] [CrossRef]
- Hofton, M.A.; Malavassi, E.; Blair, J.B. Quantifying recent pyroclastic and lava flows at Arenal Volcano, Costa Rica, using medium-footprint lidar. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Bisson, M.; Behncke, B.; Fornaciai, A.; Neri, M. LiDAR-based digital terrain analysis of an area exposed to the risk of lava flow invasion: The Zafferana Etnea territory, Mt. Etna (Italy). Nat. Hazards 2009, 50, 321–334. [Google Scholar] [CrossRef]
- Kereszturi, G.; Procter, J.; Cronin, S.J.; Németh, K.; Bebbington, M.; Lindsay, J. LiDAR-based quantification of lava flow susceptibility in the City of Auckland (New Zealand). Remote Sen. Environ. 2012, 125, 198–213. [Google Scholar] [CrossRef]
- Calvari, S.; Coltelli, M.; Neri, M.; Pompilio, M.; Scribano, V. The 1991–1993 Etna eruption: Chronology and lava. Acta Vulcanol. 1994, 4, 1–14. [Google Scholar]
- Behncke, B.; Neri, M. The July–August 2001 eruption of Mount Etna (Sicily). Bull. Volcanol. 2003, 65, 461–476. [Google Scholar] [CrossRef]
- Coltelli, M.; Proietti, C.; Branca, S.; Marsella, M.; Andronico, D.; Lodato, L. Analysis of the 2001 lava flow eruption of Mt. Etna from three-dimensional mapping. J. Geophys. Res. Earth Surf. 2007, 112. [Google Scholar] [CrossRef]
- Andronico, D.; Cristaldi, A.; Scollo, S. The 4–5 September 2007 lava fountain at south-east crater of Mt Etna, Italy. J. Volcanol. Geotherm. Res. 2008, 173, 325–328. [Google Scholar] [CrossRef]
- Barberi, F.; Carapezza, M.L.; Valenza, M.; Villari, L. The control of lava flow during the 1991–1992 eruption of Mt. Etna. J. Volcanol. Geotherm. Res. 1983, 56, 1–34. [Google Scholar] [CrossRef]
- Andronico, D.; Spinetti, C.; Cristaldi, A.; Buongiorno, M.F. Observations of Mt Etna volcanic ash plumes in 2006: An integrated approach from ground-based and polar satellite monitoring system. J. Volcanol. Geotherm. Res. 2009, 180, 135–147. [Google Scholar] [CrossRef]
- Spinetti, C.; Colini, L.; Buongiorno, M.F.; Cardaci, C.; Ciminelli, G. Volcanic Risk management: The case of Mt. Etna 2006 eruption. Geoinf. Disaster Risk Manag. 2010, JBIGIS-UNOOSA, chapter 13. 77–81. [Google Scholar]
- Gwinner, K.; Coltelli, M.; Flohrera, J.; Jaumanna, R.; Matza, K.D.; Marsella, M.; Roatscha, T.; Scholtena, F.; Trauthana, F. The HRSC-AX Mt. Etna Project: High-resolution Orthoimages and 1 m DEM at Regional Scale. In Proceedings of the ISPRS XXXVI, Paris, France, 4–6 July 2006. T05–23 (Part 1). [Google Scholar]
- Bisson, M.; Spinetti, C.; Neri, M.; Bonforte, A. Mt. Etna volcano high resolution topography: Airborne Lidar modelling validated by GPS data. Int. J. Digital Earth 2016, 9, 710–732. [Google Scholar] [CrossRef]
- Mazzarini, F.; Pareschi, M.T.; Favalli, M.; Isola, I.; Tarquini, S.; Boschi, E. Morphology of Basaltic Lava Channel During the Mt. Etna September 2004 Eruption from Airborne Laser Altimeter Data. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef] [Green Version]
- Neri, M.; Mazzarini, F.; Tarquini, S.; Bisson, M.; Isola, I.; Behncke, B.; Pareschi, M.T. The Changing Face of Mount Etna’s Summit Area Documented with Lidar Technology. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- De Beni, E.; Behncke, B.; Branca, S.; Nicolosi, I.; Carluccio, R.; Caracciolo, F.D.; Chiappini, M. The Continuing Story of Etna’s New Southeast Crater (2012–2014): Evolution and Volume Calculations Based on Field Surveys and Aerophotogrammetry. J. Volcanol. Geotherm. Res. 2015, 303, 175–186. [Google Scholar] [CrossRef]
- Tarquini, S.; Isola, I.; Favalli, M.; Mazzarini, F.; Bisson, M.; Pareschi, M.T.; Boschi, E. TINITALY/01: A new Triangular Irregular Network of Italy. Ann. Geophys. 2007, 50, 407–425. [Google Scholar]
- Ganci, G.; Cappello, A.; Zago, V.; Bilotta, G.; Hérault, A.; Del Negro, C. 3D Lava flow mapping of the 17–25 May 2016 Etna eruption using tri-stereo optical satellite data. Ann. Geophys. 2018, 61. [Google Scholar] [CrossRef]
- De Beni, E.; Cantarero, M.; Messina, A. UAVs for volcano monitoring: A new approach applied on an active lava flow on Mt. Etna (Italy), during the 27 February–02 March 2017 eruption. J. Volcanol. Geotherm. Res. 2019, 369, 250–262. [Google Scholar] [CrossRef]
- Brown, C.G.; Sarabandi, K.; Pierce, L.E. Validation of the Shuttle Radar Topography Mission Height Data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1707–1715. [Google Scholar] [CrossRef]
- Hirano, A.; Welch, R.; Lang, H. Mapping from ASTER Stereo Image Data: Dem Validation and Accuracy Assessment. J. Photogramm. Remote Sens. 2003, 57, 356–370. [Google Scholar] [CrossRef]
- Wegmuller, U.; Bonforte, A.; De Beni, E.; Guglielmino, F.; Strozzi, T. Morphological Changes at Mt. Etna Detected by TanDEM-X. In Proceedings of the Geophysical Research Abstracts 16: EGU2014–14376, Vienna, Austria, 27 April–2 May 2014. EGU General Assembly 2014. [Google Scholar]
- Favalli, M.; Innocenti, F.; Pareschi, M.T.; Pasquare, G.; Mazzarini, F.; Branca, S.; Cavarra, L.; Tibaldi, A. The DEM of Mt. Etna: Geomorphological and Structural Implications. Acta Vulcanol. 1999, 12, 279–290. [Google Scholar]
- Intelligent Robotics Group, NASA Ames Research Center. The Ames Stereo Pipeline: Nasa’s Open Source Automated Stereogrammetry Software Version 2.6.2. 2019. Available online: https://github.com/NeoGeographyToolkit/StereoPipeline/releases/download/v2.6.2/asp_book.pdf (accessed on 10 July 2019).
- Brancato, A.; Tusa, G.; Coltelli, M.; Proietti, C.; Branca, S. Vents Pattern Analysis at Etna volcano (Sicily, Italy). In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 27 April–2 May 2014; Volume 16. [Google Scholar]
- Andronico, D.; Lodato, L. Effusive activity at Mount Etna volcano (Italy) during the 20th century: A contribution to volcanic hazard assessment. Nat. Hazards 2005, 36, 407–443. [Google Scholar] [CrossRef]
- Andronico, D.; Scollo, S.; Castro, M.D.L.; Cristaldi, A.; Lodato, L.; Taddeucci, J. Eruption dynamics and tephra dispersal from the 24 November 2006 paroxysm at South-East Crater, Mt Etna, Italy. J. Volcanol. Geotherm. Res. 2014, 274, 78–91. [Google Scholar] [CrossRef]
- Corsaro, R.A.; Andronico, D.; Behncke, B.; Branca, S.; Caltabiano, T.; Ciancitto, F.; Miraglia, L. Monitoring the December 2015 summit eruptions of Mt. Etna (Italy): Implications on eruptive dynamics. J. Volcanol. Geotherm. Res. 2017, 341, 53–69. [Google Scholar] [CrossRef]
- Pompilio, M.; Bertagnini, A.; Del Carlo, P.; Di Roberto, A. Magma dynamics within a basaltic conduit revealed by textural and compositional features of erupted ash: The December 2015 Mt. Etna paroxysms. Sci. Rep. 2017, 7, 4805. [Google Scholar] [CrossRef]
- Andronico, D.; Di Roberto, A.; De Beni, E.; Behncke, B.; Bertagnini, A.; Del Carlo, P.; Pompilio, M. Pyroclastic density currents at Etna volcano, Italy: The 11 February 2014 case study. J. Volcanol. Geotherm. Res. 2018, 357, 92–105. [Google Scholar] [CrossRef]
- Behncke, B.; Neri, M.; Nagay, A. Lava flow hazard at MountEtna (Italy): New data from a GIS-based study, in Kinematics and Dynamics of Lava Flows edited by M. Manga and G. Ventura. Spec. Pap. Geol. Soc. Am. 2005, 396, 187–205. [Google Scholar] [CrossRef]
- Pleiades Imagery User Guide, ASTRIUM, Airbus Defence and Space. Available online: http://URL www.intelligence-airbusds.com/en/4572-pleiades-technical-documents (accessed on 6 August 2018).
- Bonforte, A.; Puglisi, G. Dynamics of the eastern flank of Mt. Etna volcano (Italy) investigated by a dense GPS network. J. Volcanol. Geotherm. Res. 2006, 153, 357–369. [Google Scholar] [CrossRef]
- Spinetti, C.; Mazzarini, F.; Casacchia, R.; Colini, L.; Neri, M.; Behncke, B.; Salvatori, R.; Buongiorno, M.F.; Pareschi, M.T. Spectral properties of volcanic materials from hyperspectral field and satellite data compared with Lidar data at Mt Etna. Int. J. Appl. Earth Obs. Geoinf. 2009, 11, 142–155. [Google Scholar] [CrossRef]
- Beyer, R.A.; Alexandrov, O.; McMichael, S. The Ames Stereo Pipeline: NASA’s Open Source Software for Deriving and Processing Terrain Data. Earth Space Sci. 2018, 5, 537–548. [Google Scholar] [CrossRef]
- Shean, D.E.; Alexandrov, O.; Moratto, Z.M.; Smith, B.E.; Joughin, I.R.; Porter, C.; Morin, P. An automated, open-source pipeline for mass production of digital elevation models (DEMs) from very-high-resolution commercial stereo satellite imagery. ISPRS J. Photogramm. Remote Sens. 2016, 116, 101–117. [Google Scholar] [CrossRef] [Green Version]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Landsat 8 Data ID: LC08_L1TO_188034_20150728_20170406_01_T1 from U.S. Geological Survey Earth Explorer. Available online: https://URL earthexplorer.usgs.gov/ (accessed on 28 July 2017).
- Facciolo, G.; De Franchis, C.; Meinhardt, E. Mgm: A significantly more global matching for stereovision. In Proceedings of the British Machine Vision Conference (BMVC), Swansea, UK, 7–10 September 2015; pp. 90–102. [Google Scholar]
- Hirschmüller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef]
- Pomerleau, F.; Colas, F.; Siegwart, R.; Magnenat, S. Comparing ICP variants on real-world data sets: Open-source library and experimental protocol. Auton. Robots 2013, 34, 133–148. [Google Scholar] [CrossRef]
- Barzaghi, R.; Brovelli, M.A.; Manzino, A.; Sguerso, D.; Sona, G. The new Italian quasi-geoid ITALGEO95. Bollettino di Geodesia e Scienze Affini 1996, 55, 57–72. [Google Scholar]
- Danielson, J.J.; Poppenga, S.K.; Brock, J.C.; Evans, G.A.; Tyler, D.J.; Gesch, D.B.; Barras, J.A. Topobathymetric elevation model development using a new methodology: Coastal national elevation database. J. Coast. Res. 2016, 76, 75–89. [Google Scholar] [CrossRef] [Green Version]
- Hintze, J.L.; Nelson, R.D. Violin plots—A box plot-density trace synergism. Am. Stat. 1998, 52, 181–184. [Google Scholar] [CrossRef]
- National Institute of Standards and Technology. Violin plot: National Institute of Standards and Technology. 2015. Available online: http://URL www.itl.nist.gov/div898/software/dataplot/refman1/auxillar/violplot.htm (accessed on 5 September 2017).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DEM | Acquisition Technique | Spatial Resolution (m) | Vertical RMSE (m) | Mt. Etna Coverage Area | DEM Data Availability | Bibliography | Vertical Datum |
|---|---|---|---|---|---|---|---|
| SRTM | RADAR | 90 | 16 | Full | Yes | [25] | WGS84 geoid orthometric |
| GDEM ASTER | Satellite Stereo | 30 | 8.6 | Partial | No | [26] | WGS84 geoid orthometric |
| IGM | Raster Cartography | 20 | 10 | Full | Yes | http://www.igmi.org | WGS84 geoid orthometric |
| MAT | Raster Cartography | 20 | NA | Full | Yes | http://www.sinanet.isprambiente.it/it/sia-ispra/download-mais/ | NA |
| TINITALY | Raster Cartography | 10 | 3.5 | Full | Yes | [22] | WGS84 geoid orthometric |
| TanDEM-X 2012 | RADAR | 5 | 5.2 | Summit | No | [27] | WGS84 geoid orthometric |
| ATLAS | Raster Cartography | 5 | 1 | Full | Yes | [28] | WGS84 geoid orthometric |
| DSM2012/2014 | Digital Photogram- metry | 2 | NA | Summit | Yes | [21] | NA |
| Lidar 2004 | Airborne Lidar | 2 | NA | Partial | No | [19] | NA |
| Lidar 2007 | Airborne Lidar | 2 | NA | Summit | No | [20] | NA |
| DSM 2005 | Digital Photogram-metry | 1 | NA | Full | No | [17] | NA |
| Lidar 2005 | Airborne Lidar | 2 | 0.24 | Full | Yes | [18] | WGS84 geoid orthometric |
| Pleiades 2015 | Stereo Satellite Images | 2 | NA | Summit | Yes | [23] | NA |
| Validation, Ellipsoid Heights | Validation, Orthometric Heights | ||||
|---|---|---|---|---|---|
| Statistics (Meters) | DSM 1&2, LSW | DSM 1&2, MGM | DSM 2&3, LSW | DSM 2&3, MGM | DSM 2&3, LSW |
| Mean Error | 6.32 | 6.50 | 4.50 | 4.72 | 4.50 |
| Median | 6.80 | 7.12 | 4.74 | 4.72 | 4.75 |
| Standard Deviation | 1.51 | 1.52 | 1.18 | 0.88 | 1.03 |
| MAE | 6.32 | 6.50 | 4.50 | 4.72 | 4.50 |
| RMSE | 6.49 | 6.68 | 4.66 | 4.80 | 4.61 |
| GCP points | 23 | 23 | 41 | 41 | 41 |
| Statistics (Meters) | Validation on 41 GCP Points (from the Geodetic Monitoring Network of Mt. Etna) | Alignment Differences on 41 GCP Points Location | ||
|---|---|---|---|---|
| Pleiades 2&3 DSM MGM Correlation Not Aligned | Pleiades 2&3 DSM MGM Correlation Aligned | Lidar DSM | Pleiades DSM Aligned Compared to Lidar DSM | |
| Mean Error | 4.72 | −0.52 | 0.17 | −0.64 |
| Median | 4.72 | −0.39 | 0.11 | −0.52 |
| Standard deviation | 0.88 | 0.59 | 0.57 | 0.55 |
| MAE | 4.72 | 0.60 | 0.42 | 0.68 |
| RMSE | 4.80 | 0.78 | 0.59 | 0.84 |
| Statistics, Meters | Alignment Errors on Roads—60 Random Points |
|---|---|
| Mean Error | −0.15 |
| Median | −0.18 |
| Standard deviation | 0.46 |
| MAE | 0.38 |
| RMSE | 0.48 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palaseanu-Lovejoy, M.; Bisson, M.; Spinetti, C.; Buongiorno, M.F.; Alexandrov, O.; Cecere, T. High-Resolution and Accurate Topography Reconstruction of Mount Etna from Pleiades Satellite Data. Remote Sens. 2019, 11, 2983. https://doi.org/10.3390/rs11242983
Palaseanu-Lovejoy M, Bisson M, Spinetti C, Buongiorno MF, Alexandrov O, Cecere T. High-Resolution and Accurate Topography Reconstruction of Mount Etna from Pleiades Satellite Data. Remote Sensing. 2019; 11(24):2983. https://doi.org/10.3390/rs11242983
Chicago/Turabian StylePalaseanu-Lovejoy, Monica, Marina Bisson, Claudia Spinetti, Maria Fabrizia Buongiorno, Oleg Alexandrov, and Thomas Cecere. 2019. "High-Resolution and Accurate Topography Reconstruction of Mount Etna from Pleiades Satellite Data" Remote Sensing 11, no. 24: 2983. https://doi.org/10.3390/rs11242983
APA StylePalaseanu-Lovejoy, M., Bisson, M., Spinetti, C., Buongiorno, M. F., Alexandrov, O., & Cecere, T. (2019). High-Resolution and Accurate Topography Reconstruction of Mount Etna from Pleiades Satellite Data. Remote Sensing, 11(24), 2983. https://doi.org/10.3390/rs11242983