Error Analysis on Indoor Localization with Visible Light Communication



Abstract
:1. Introduction
2. VLC Indoor Positioning with AOA Measurement
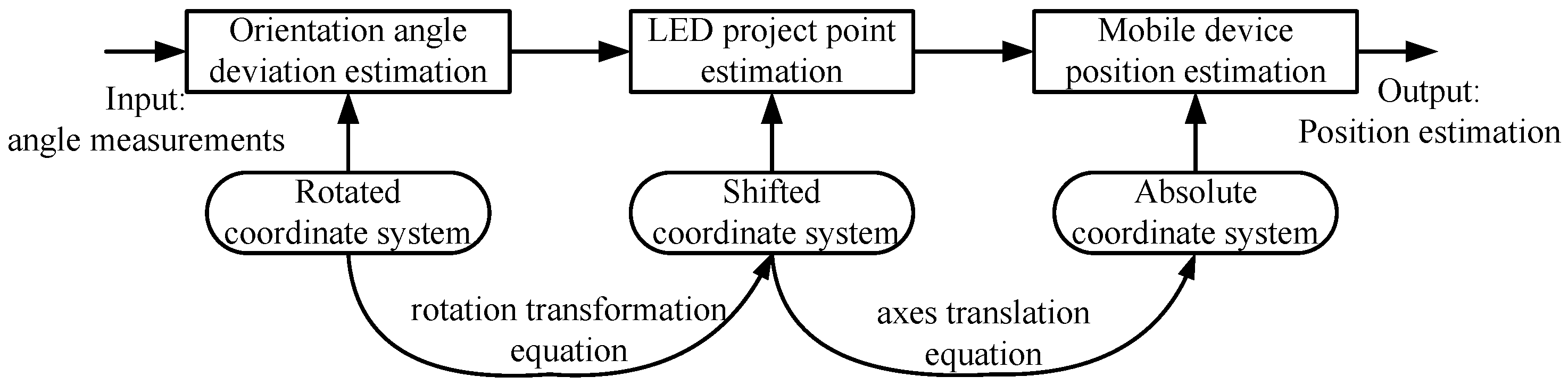
2.1. Orientation Angle Deviation Estimation
2.2. LED Projection Point Estimation
2.3. Final Mobile Device Position Estimation
3. Theoretical Analysis
3.1. Location Error Analysis
3.2. Remarks on the VLC Positioning System
- (1)
- Generally speaking, the reference LED ( LED) should be located far away from other LEDs.Assuming all the elements in H are scaled by , (when , the relative distances become larger or vice versa), we obtainThus, when , it can cause the second item of Equation (32) to be larger, therefore resulting in smaller location estimate.
- (2)
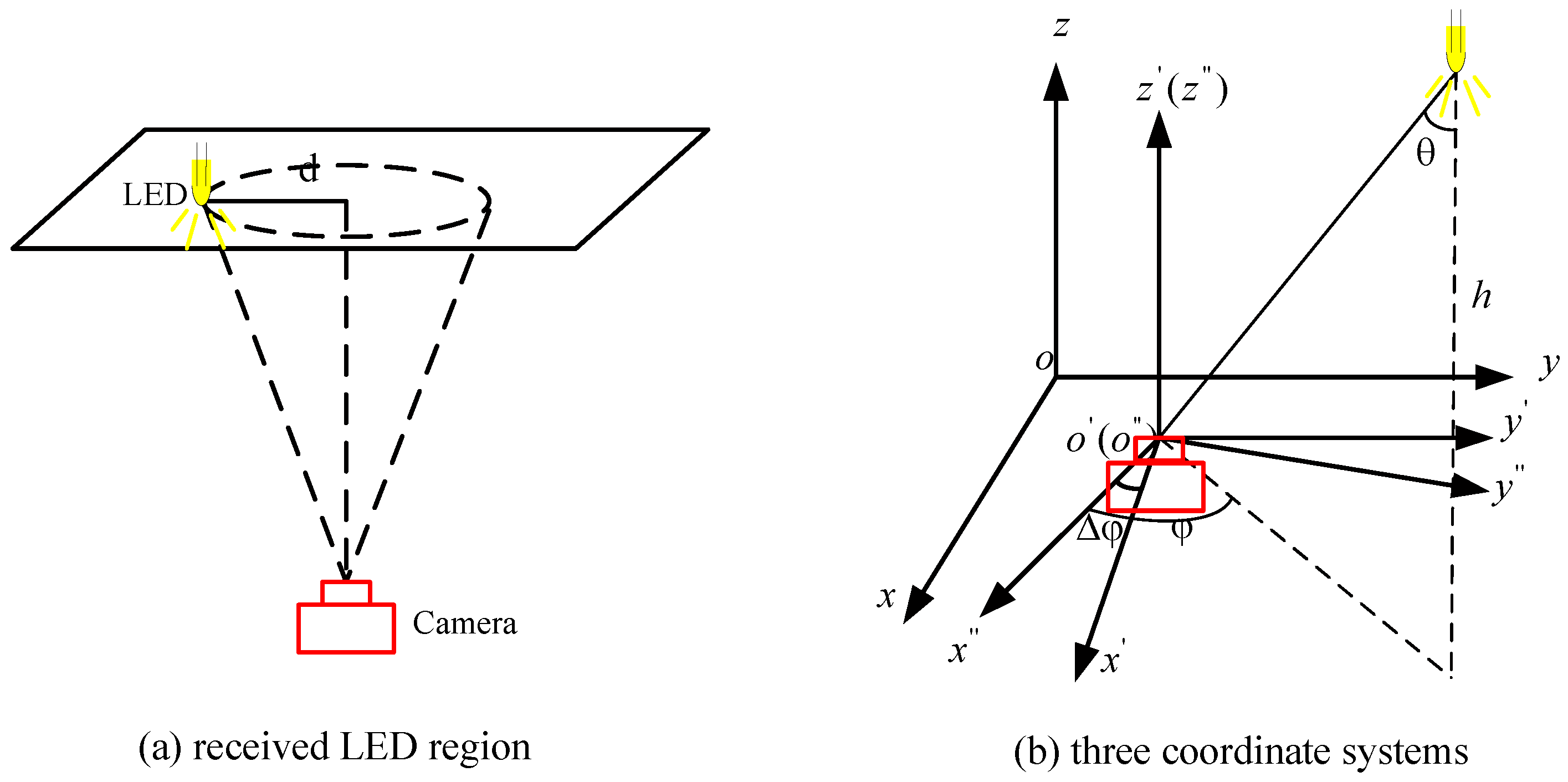
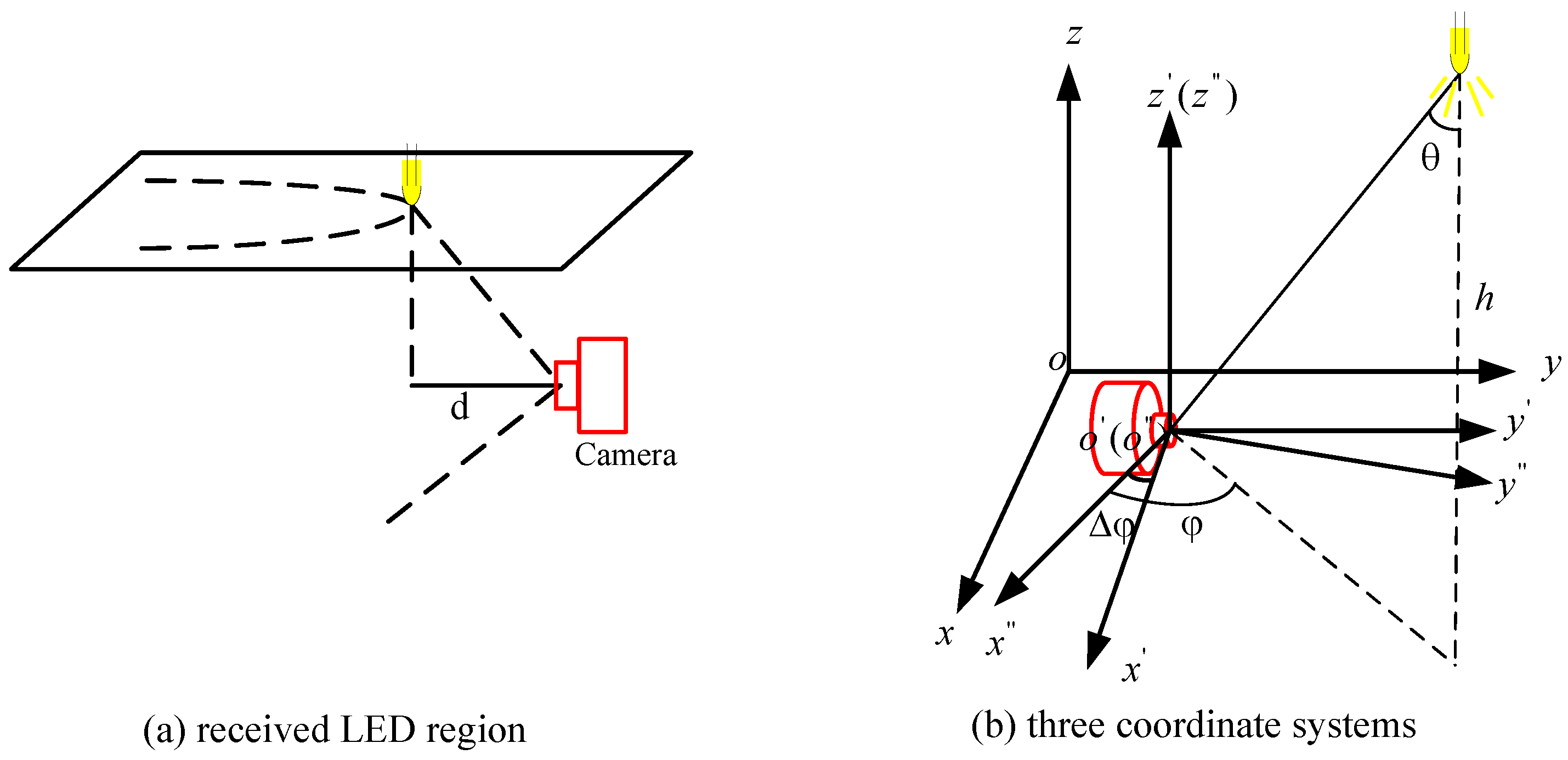
- The horizon reception mode can easily produce better position estimation results than the vertical reception mode.First, from the definition of horizon reception and vertical reception mode in Section 2 and Figure 1 and Figure 2, it can be seen that the polar angle of vertical reception model is larger than that of the horizon reception model. In the proposed algorithm, the polar angle is utilized as for position estimation. With the same polar angle deviation , smaller will occur smaller error value, according to the property of the tangent function. Thus, under the same measurement noise scenario, of the horizon reception model is more accurate than that of the vertical reception model because of smaller . Therefore, the positioning performance is better.Next, from Equation (32), it can be found thatTherefore,Thus, it can be concluded that the bound of the final position estimation in the horizon reception mode is also smaller than that of the vertical reception model. If we use the camera to take photo of LED using horizon reception mode and LED using the vertical reception mode, because the polar angle is always smaller than , it is reasonable to assume and . Under this condition, horizon reception mode is easier for obtaining better positioning performance.
- (3)
- The chosen LED for the mobile device location should be the LED closest to the mobile device.From Equation (32), it can be found that the localization LED selection rule reflects the and . When the chosen LED is closer to the mobile device, the will be smaller. From the discussion of Equation (35), the becomes smaller with condition. Therefore, it will decrease the bound of the location error.
4. Simulation Results
4.1. Simulation Setup
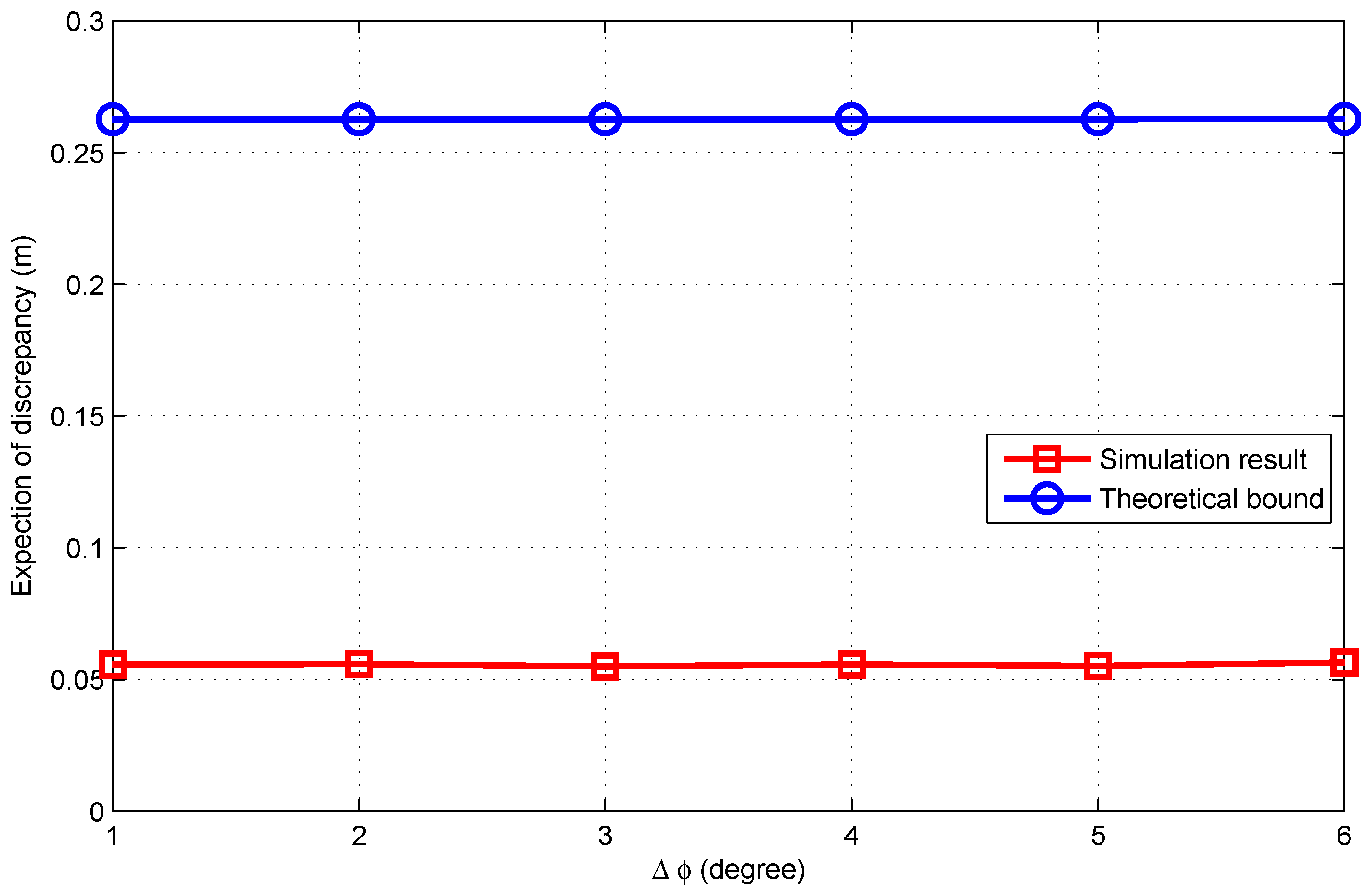
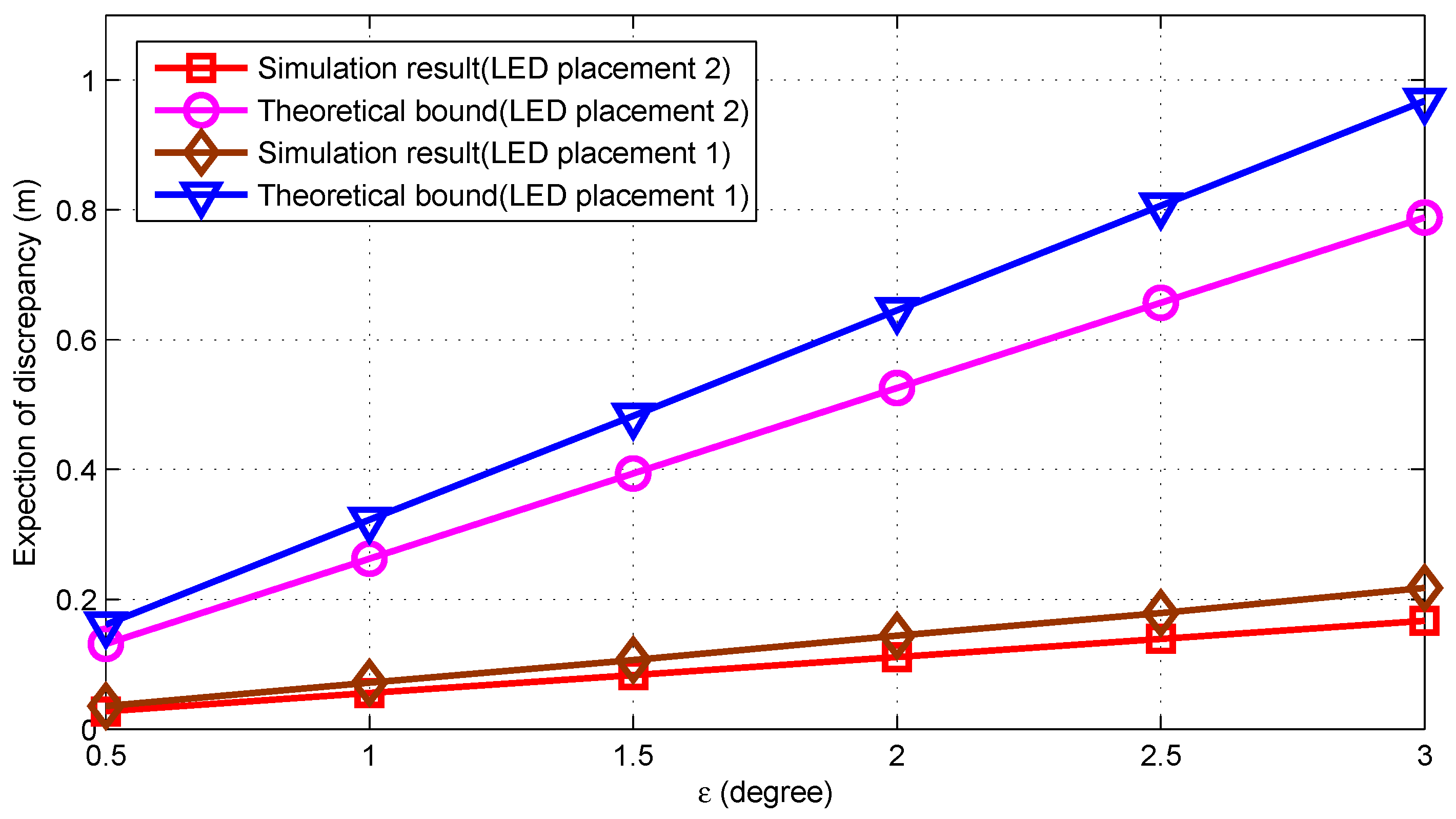
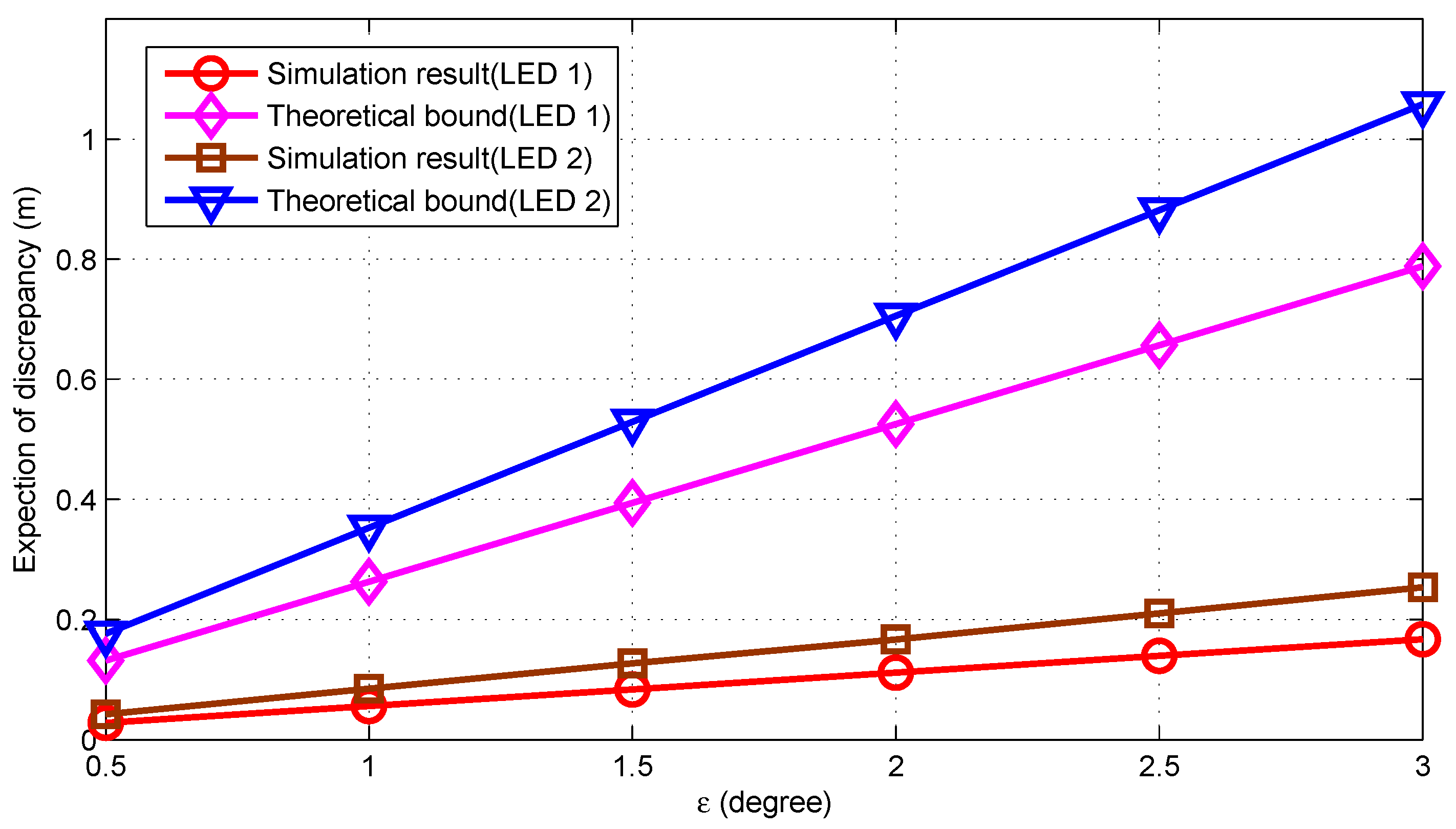
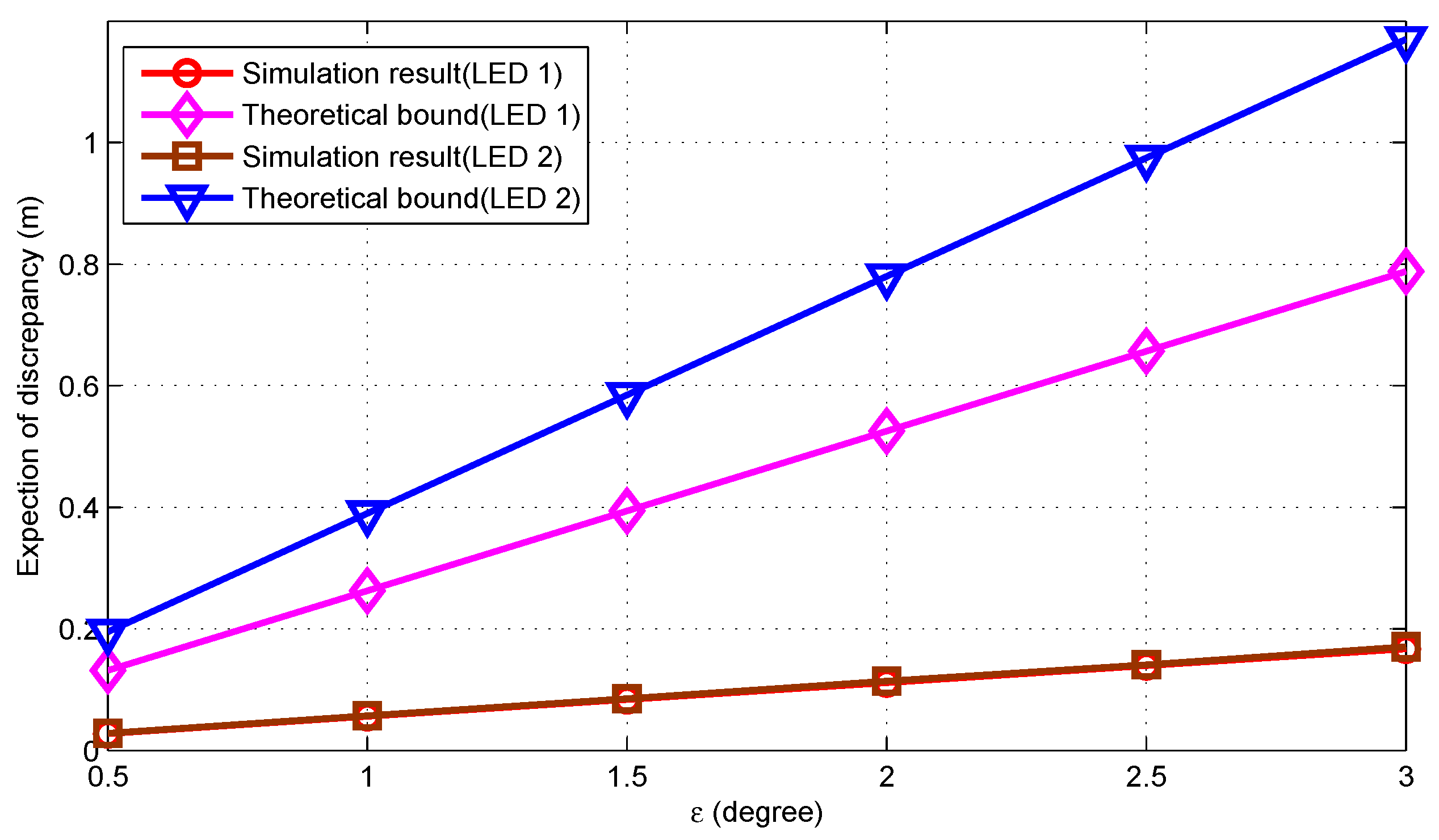
4.2. Performance Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Gong, C.; Xu, Z. LMMSE SIMO receiver for short-range non-line-of-sight scattering communication. IEEE Trans. Wireless Commun. 2015, 14, 5338–5349. [Google Scholar] [CrossRef]
- Letaief, K.; Zhang, W. Cooperative communications for cognitive radio networks. Proc. IEEE 2009, 97, 878–893. [Google Scholar] [CrossRef]
- Xin, C.; Song, M. An application-oriented spectrum sharing architecture. IEEE Trans. Wireless Commun. 2015, 14, 2394–2401. [Google Scholar] [CrossRef]
- Han, S.; Liang, Y.; Soong, B.H. Spectrum refarming: A new paradigm of spectrum sharing for cellular networks. IEEE Trans. Commun. 2015, 63, 1895–1906. [Google Scholar] [CrossRef]
- Gavrincea, C.G.; Baranda, J.; Henarejos, P. Rapid prototyping of standard-compliant visible light communications system. IEEE Commun. Mag. 2014, 52, 80–87. [Google Scholar] [CrossRef] [Green Version]
- Yamazato, T.; Takai, I.; Okada, H.; Fujii, T.; Yendo, T.; Arai, S.; Andoh, M.; Harada, T.; Yasutomi, K.; Kagawa, K.; et al. Image-sensor-based visible light communication for automotive applications. IEEE Commun. Mag. 2014, 52, 88–97. [Google Scholar] [CrossRef]
- Jovicic, A.; Li, J.; Richardson, T. Visible light communication: Opportunities, challenges and the path to market. IEEE Commun. Mag. 2013, 51, 26–32. [Google Scholar] [CrossRef]
- Karunatilaka, D.; Zafar, F.; Kalavally, V.; Parthiban, R. LED based indoor visible light communications: State of the art. IEEE Commun. Surv. Tuts. 2015, 17, 1649–1678. [Google Scholar] [CrossRef]
- Wu, S.; Wang, H.; Youn, C. Visible light communications for 5G wireless networking systems: From fixed to mobile communications. IEEE Netw. 2014, 28, 41–45. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Integrated system of white LED visible-light communication and power-line communication. IEEE Trans. Consum. Electron. 2003, 49, 71–79. [Google Scholar] [CrossRef]
- Schill, F.; Zimmer, U.R.; Trumpf, J. Visible spectrum optical communication and distance sensing for underwater applications. In Proceedings of the Australasian Conference on Robotics and Automation, Canberra, Australia, 6–8 December 2004; p. 1028. [Google Scholar]
- Hranilovic, S.; Lampe, L.; Hosur, S. Visible light communications: The road to standardization and commercialization (part 1). IEEE Commun. Mag. 2013, 51, 24–25. [Google Scholar] [CrossRef]
- Lim, J. Ubiquitous 3D positioning systems by LED-based visible light communications. IEEE Wireless Commun. 2015, 22, 80–85. [Google Scholar] [CrossRef]
- Wang, J.; Li, H.; Zhang, X.; Wu, R.; Li, H.; Zhang, X.; Wu, R. VLC-based indoor positioning algorithm combined with OFDM and Particle Filter. China Commun. 2019, 16, 86–96. [Google Scholar]
- Lim, S.-K.; Ruling, K.; Kim, I.; Jang, I.S. Entertainment lighting control network standardization to support VLC services. IEEE Commun. Mag. 2013, 51, 42–48. [Google Scholar] [CrossRef]
- Biagi, M.; Pergoloni, S.; Vegni, A.M. LAST: A framework to localize, access, schedule, and transmit in indoor VLC systems. J. Lightw. Technol. 2015, 33, 1872–1887. [Google Scholar] [CrossRef]
- Armstrong, J.; Sekercioglu, Y.A.; Neild, A. Visible light positioning: A roadmap for international standardization. IEEE Commun. Mag. 2013, 51, 68–73. [Google Scholar] [CrossRef]
- Yang, S.H.; Jung, E.M.; Han, S.K. Indoor location estimation based on LED visible light communication using multiple optical receivers. IEEE Commun. Lett. 2013, 17, 1834–1837. [Google Scholar] [CrossRef]
- Yang, S.H.; Jeong, E.M.; Kim, D.R.; Kim, H.S.; Son, Y.H.; Han, S.K. Indoor three-dimensional location estimation based on LED visible light communication. Electron. Lett. 2013, 49, 54–56. [Google Scholar] [CrossRef]
- Do, T.H.; Yoo, M. TDOA-based indoor positioning using visible light. Photon Netw. Commun. 2014, 27, 80–88. [Google Scholar] [CrossRef]
- Lee, S.; Jung, S.Y. Location awareness using angle-of-arrival based circular-PD-array for visible light communication. In Proceedings of the 18th Asia-Pacific Conference on Communications, Jeju Island, Korea, 15–17 October 2012; pp. 480–485. [Google Scholar]
- Nadeem, U.; Hassan, N.U.; Pasha, M.A.; Yuen, C. Highly accurate 3D wireless indoor positioning system using white LED lights. Electron. Lett. 2014, 50, 828–830. [Google Scholar] [CrossRef]
- Yang, S.H.; Kim, H.S.; Son, Y.H.; Han, S.K. Three-dimensional visible light indoor localization using AOA and RSS with multiple optical receivers. J. Lightw. Technol. 2014, 32, 2480–2485. [Google Scholar] [CrossRef]
- Yasir, M.; Ho, S.W.; Vellambi, B.N. Indoor positioning system using visible light and accelerometer. J. Lightw. Technol. 2014, 32, 3306–3316. [Google Scholar] [CrossRef]
- Lee, Y.U.; Kavehrad, M. Two hybrid positioning system design techniques with lighting LEDs and Ad-hoc wireless network. IEEE Trans. Consum. Electron. 2012, 58, 1176–1184. [Google Scholar] [CrossRef]
- Nadeem, U.; Hassan, N.U.; Pasha, M.A.; Yuen, C. Indoor positioning system designs using visible LED lights: Performance comparison of TDM and FDM protocols. Electron. Lett. 2015, 51, 72–74. [Google Scholar] [CrossRef]
- Hou, Y.; Xiao, S.; Zheng, H.; Hu, W. Multiple access scheme based on block encoding time division multiplexing in an indoor positioning system using visible light. J. Opt. Commun. Netw. 2015, 7, 489–495. [Google Scholar] [CrossRef]
- Wang, T.Q.; Sekercioglu, Y.A.; Neild, A.; Armstrong, J. Position accuracy of time-of-arrival based ranging using visible light with application in indoor localization systems. J. Lightw. Technol. 2013, 31, 3302–3308. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, J.; Fu, Y.; Shi, A. Theoretical accuracy analysis of indoor visible light communication positioning system based on received signal strength indicator. J. Lightw. Technol. 2014, 32, 4180–4186. [Google Scholar] [CrossRef]
- Zhu, B.; Cheng, J.; Wang, Y.; Yan, J.; Wang, J. Three-dimensional VLC positioning based on angle difference of arrival with arbitrary tilting angle of receiver. IEEE J. Sel. Areas Commun. 2018, 36, 8–22. [Google Scholar] [CrossRef]
- Sun, X.; Zou, Y.; Duan, J.; Shi, A. The positioning accuracy analysis of AOA-based indoor visible light communication system. In Proceedings of the 2015 International Conference on Optoelectronics and Microelectronics, Changchun, China, 16–18 July 2015; pp. 186–190. [Google Scholar]
- Yan, J.; Zhu, B. A visible light communication indoor localization algorithm in rotated environments. In Proceedings of the 2016 International Conference On Computer, Information and Telecommunication Systems( CITS), Kunming, China, 6–8 July 2016; pp. 1–4. [Google Scholar]
- Leon, S.J. Linear Algebra with Applications; Prentice Hall College Div: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Caffery, J.J., Jr. A new approach to the geometry of TOA location. In Proceedings of the IEEE 52nd Vehicular Technology Conference, Boston, MA, USA, 24–28 September 1994; pp. 1943–1949. [Google Scholar]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Cambridge University Press: Oxford, UK, 1990. [Google Scholar]
- Forbes, C.; Evans, M.; Hastings, N.; Peacock, B. Statistical Distributions, 3rd ed.; Wiley: New York, NY, USA, 2000. [Google Scholar]
- Krantz, S.G. Handbook of Complex Variables; Birkhauser Biston: Boston, MA, USA, 1999. [Google Scholar]
- Alonso-Gonzalez, I.; Rodriguez, D.S.; Ley-Bosch, C.; Suarez, M.A.Q. Discrete indoor three-dimensional localization system based on neural networks using visible light communication. Sensors 2018, 18, 1040. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LED Placement 1 | LED Placement 2 | |
|---|---|---|
| 1st LED | (3 m, 1 m) | (3 m, 1 m) |
| 2nd LED | (3.93 m, 1.52 m) | (3 m, 2.73 m) |
| 3rd LED | (4.12 m, 3.12 m) | (2.78 m, 3.89 m) |
| LED Placement 1 | LED Placement 2 | |
|---|---|---|
| (1st, 2nd) | 1.07 m | 1.73 m |
| (1st, 3rd) | 2.40 m | 2.91 m |
| (2nd, 3rd) | 1.61 m | 1.14 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Zhu, B.; Chen, L.; Wang, J.; Liu, J. Error Analysis on Indoor Localization with Visible Light Communication. Remote Sens. 2019, 11, 427. https://doi.org/10.3390/rs11040427
Yan J, Zhu B, Chen L, Wang J, Liu J. Error Analysis on Indoor Localization with Visible Light Communication. Remote Sensing. 2019; 11(4):427. https://doi.org/10.3390/rs11040427
Chicago/Turabian StyleYan, Jun, Bingcheng Zhu, Liang Chen, Jin Wang, and Jingbin Liu. 2019. "Error Analysis on Indoor Localization with Visible Light Communication" Remote Sensing 11, no. 4: 427. https://doi.org/10.3390/rs11040427
APA StyleYan, J., Zhu, B., Chen, L., Wang, J., & Liu, J. (2019). Error Analysis on Indoor Localization with Visible Light Communication. Remote Sensing, 11(4), 427. https://doi.org/10.3390/rs11040427