1. Introduction
Satellite constellation design is an essential sector of designing spacecraft missions such as global navigation, communication, remote sensing, and Earth and space observation. These satellite missions may consist of multiple spacecrafts which operate simultaneously in order to meet the optimal performance of the system and reduce the mission costs [
1].
The radio occultation (RO) technique was originally used to study the atmosphere and ionosphere of Mars [
2]. The idea of using GPS RO technology to study the Earth’s atmosphere was pioneered by the GPS/Meteorology (GPS/MET) experiment launched in 1995 [
3,
4]. Since then, large amounts of vertical profiles of atmospheric and ionospheric parameters have been obtained by following satellite missions, including the CHAllenging Minisatellite Payload (CHAMP) [
5], the Constellation Observing System for Meteorology, Ionosphere and Climate (COSMIC) [
6], the Meteorological operational satellite-A (MetOp-A) [
7], MetOp-B [
8], and FengYun-3C [
9]. For RO missions with single LEO satellite such as GPS/MET and CHAMP, the number of daily RO events (ROEs) and the corresponding spatial and temporal resolution of RO data were limited. COSMIC, the first operational GPS RO constellation with six satellites, has observed 1000–2500 ROEs per day at the early stages of its operation [
10,
11]. The resultant data contribute significantly to weather forecasting [
12], the global climate change [
13], space weather monitoring [
6], and ionospheric climate studies [
14]. Due to the great success of the COSMIC mission, the follow-on mission COSMIC-2 is initially designed with six low-inclination-angle and six high-inclination-angle orbit satellites. Although the launch of six high-inclination-angle orbit satellites of COSMIC-2 was finally canceled due to budget constraints, it is likely that an alternative source can be obtained from high latitude constellations provided by commercial companies [
15].
On the other hand, the number of navigation satellites whose signal can be used for the RO observation has increased continuously in recent years. Over the past decade, navigation satellite systems are being developed and emerging, such as the Chinese BeiDou navigation system (BDS), Galileo and Japanese Quasi-Zenith Satellite System (QZSS) and will bring unique opportunities and challenges for the Global Navigation Satellite System (GNSS) RO technique, in addition to the fully operational GPS and GLONASS. With the increased number of available navigation satellites, the use of multiple GNSS signals is an opportunity for better sounding of the atmosphere [
16]. The new generation of GNSS RO missions is normally equipped with multi-GNSS RO receivers. Each of the six COSMIC-2 satellites is equipped with a GNSS RO receiver, which will receive navigation signals from both GPS and GLONASS [
17]. The GNSS occultation sounder (GNOS) instrument onboard FY-3C and FY-3D satellites can receive signals from Beidou Navigation Satellite System (BDS) and GPS [
18,
19]. The new instrument, named GNOS-II, onboard FY-3E satellite is capable of tracking GNSS signals from GPS, BDS, and Galileo [
20].
Better temporal and spatial distribution of ROEs, important components of designing a GNSS RO system, is a motivation for extensive researches. Mousa et al. [
21] used the variable separation approach to seek the best practical orbital parameters of the LEO satellite for a tropical GPS RO mission, and the performance of the orbit design is evaluated with the number of ROEs and their longitudinal and latitudinal distributions. Xu et al. [
22] analyzed the impact of LEO orbit parameters on the number and global distribution of RO events. Moreover, the impacts of the orbit inclination angles of LEO satellites on the performance of the COSMIC and COSMIC-2 was investigated by Chern et al. [
23]. For the first time, Juang et al. [
24] used a genetic algorithm (GA) for the optimal design of a walker constellation composed of 12 satellites in a multi-GNSS RO mission. The fitness function of the GA applied in Reference [
24] is established on the basis of the minimum number of 24 h ROEs over each 4.5° × 4.5° longitude–latitude grid cell and the temporal distribution of the ROEs is not considered. Lee and Mortari [
25] also applied GA to optimize the 2D-lattice flower constellations composed of 12 satellites for a LEO-LEO RO mission, with the purpose of maximizing the odds at which pairs of satellites can see each other through the atmosphere (active or observation time). Asgarimehr and Hossainali [
26] further used GA to optimize the 2D-lattice flower constellation (2D-LFC) and 3D-lattice flower constellation (3D-LFC) composed of 6 LEO satellites for GPS RO observations over Asia and the Pacific region, and the performances of the optimized constellations for RO observation are even superior to COSMIC over the target region. They devised the fitness function based on the concept of a Voronoi diagram, which evaluates the spatio-temporal distribution of ROEs. In these previous studies which use the evolutionary algorithms to optimize the RO constellation [
24,
25,
26], a GA is generally applied. While in the design of optimal satellite constellations for different kinds of applications, another evolutionary algorithm, the particle swarm optimization (PSO) algorithm, is also widely used and it has been documented that a PSO performs even better than a GA [
27,
28].
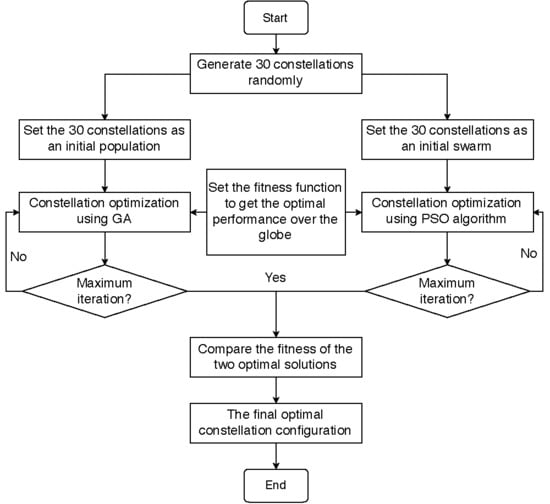
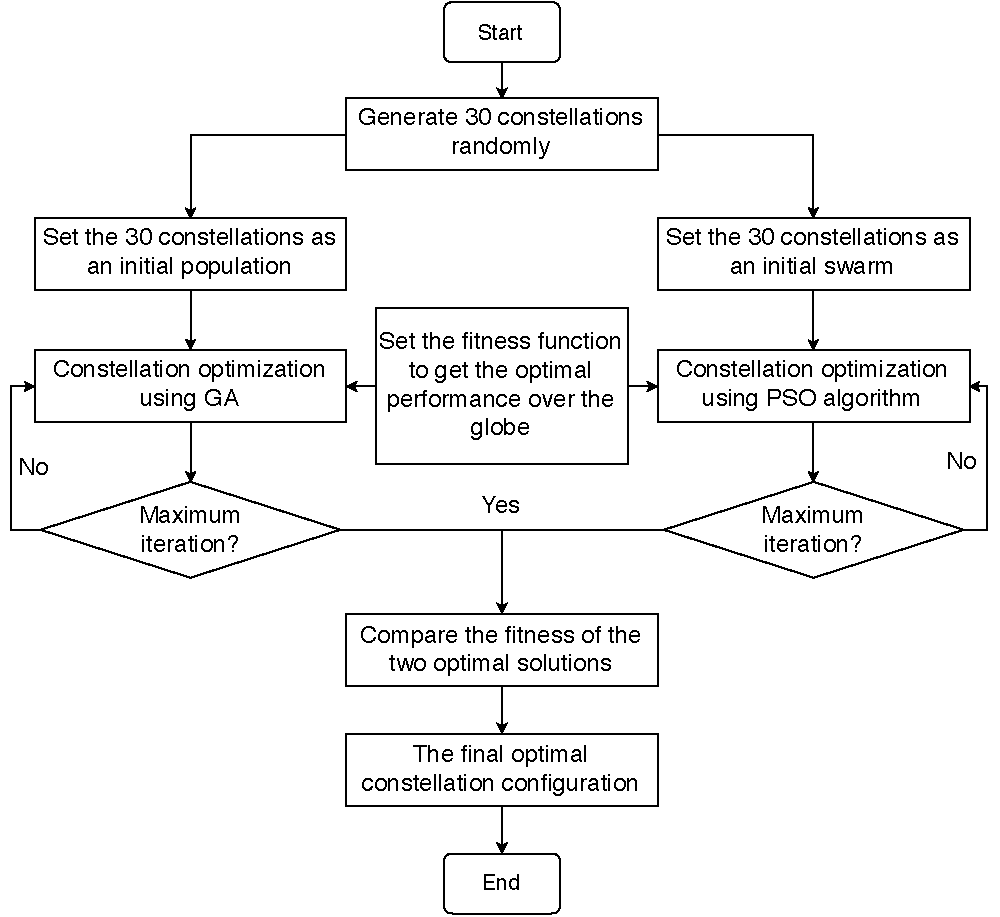
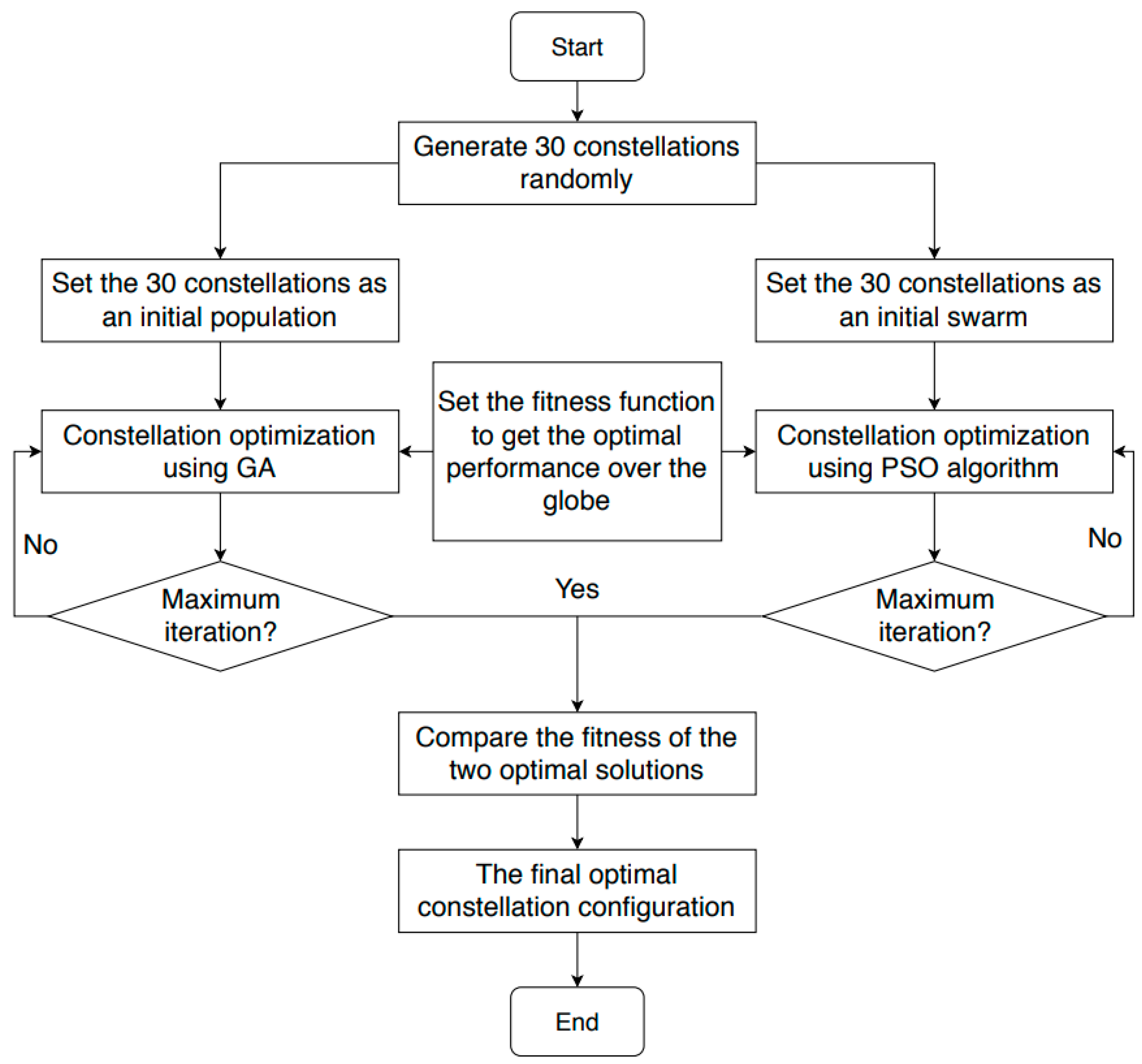
In this study, the navigation signals from all the five available Global Navigation Satellite Systems (GNSS) (i.e., GPS, GLONASS, BDS, GALILEO, and QZSS) are fully exploited for the first time and two constellation patterns, the 2D-LFC and 3D-LFC, are adopted to develop the optimal constellations composed of 6–12 LEO satellites for GNSS RO observations over the globe. Considering that the optimization algorithms may result in different performance levels of the eventual constellation [
27], both GA and PSO are applied to search for the optimal configuration of the constellation for GNSS RO observations. The fitness function of the evolutionary algorithms is established based on the concept of spatio-temporal point process. Both the spatial and the temporal distributions of ROEs are taken into consideration evaluating the optimality of the resultant constellation.
In what follows, we outline how this is done.
Section 2 describes the principles and the methods used in the optimization process and the simulations. In
Section 3, the optimal constellation configurations are presented and are evaluated. The comparisons of the methods and results with related researches are discussed in
Section 4, and some conclusions are reached in
Section 5.
4. Discussion
As introduced in
Section 2.3, the fitness function used in the evolutionary algorithms is based on the concept of a spatio-temporal point pattern. In Equation (6),
represents the total number of
spatio-temporal grids over the globe for one day, hence, the degree of the optimization both in the spatial and temporal ROEs distribution is taken into consideration by this fitness function. Searching for the optimal 12 satellite walker constellation for GNSS RO observation with a GA algorithm, Juang et al. [
24] used a fitness function similar to Equation (6), while the spatio-temporal grids of
were used and there was no evaluation of the temporal distribution of ROEs during one day. Furthermore, here in Equation (6),
, the expected mean number of ROEs of each spatio-temporal grid, was calculated based on the total number of simulated 24 h ROEs over the globe and the number of spatio-temporal grids, while this parameter was just simplified to be equal to 4 in the study by Juang et al. [
24].
Both Juang et al. [
24] and Asgarimehr et al. [
26] used a GA to search for the optimal LEO constellation configuration for GNSS RO performance over the target region. Considering that the optimized constellation configuration sought depends on the optimization algorithm used, it stands to reason to use more than one evolutionary algorithm in the optimization process only if the comparison between the algorithms is fair [
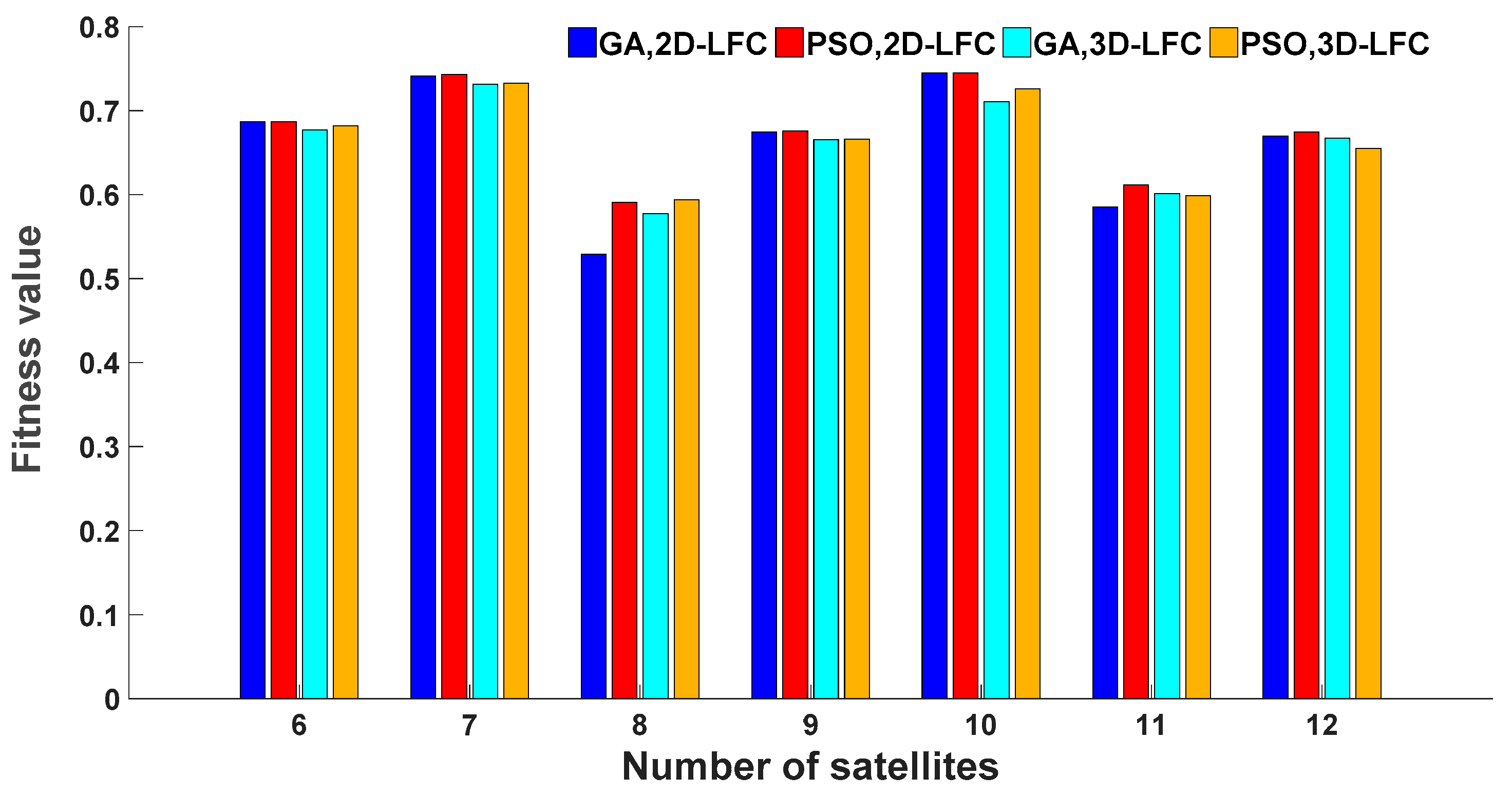
27]. Hence, both a GA and PSO were applied in our study. To ensure the fairness of the comparison between the two algorithms, the evolutionary processes were iterated the same number of times (100 generations) in each algorithm. It was found that regardless of the constellation pattern, the PSO algorithm generally (although not necessary) performed better than a GA, which means that the spatial and temporal distributions of ROEs, observed by the optimal constellations obtained by the PSO algorithm, are generally better compared to those derived by GA.
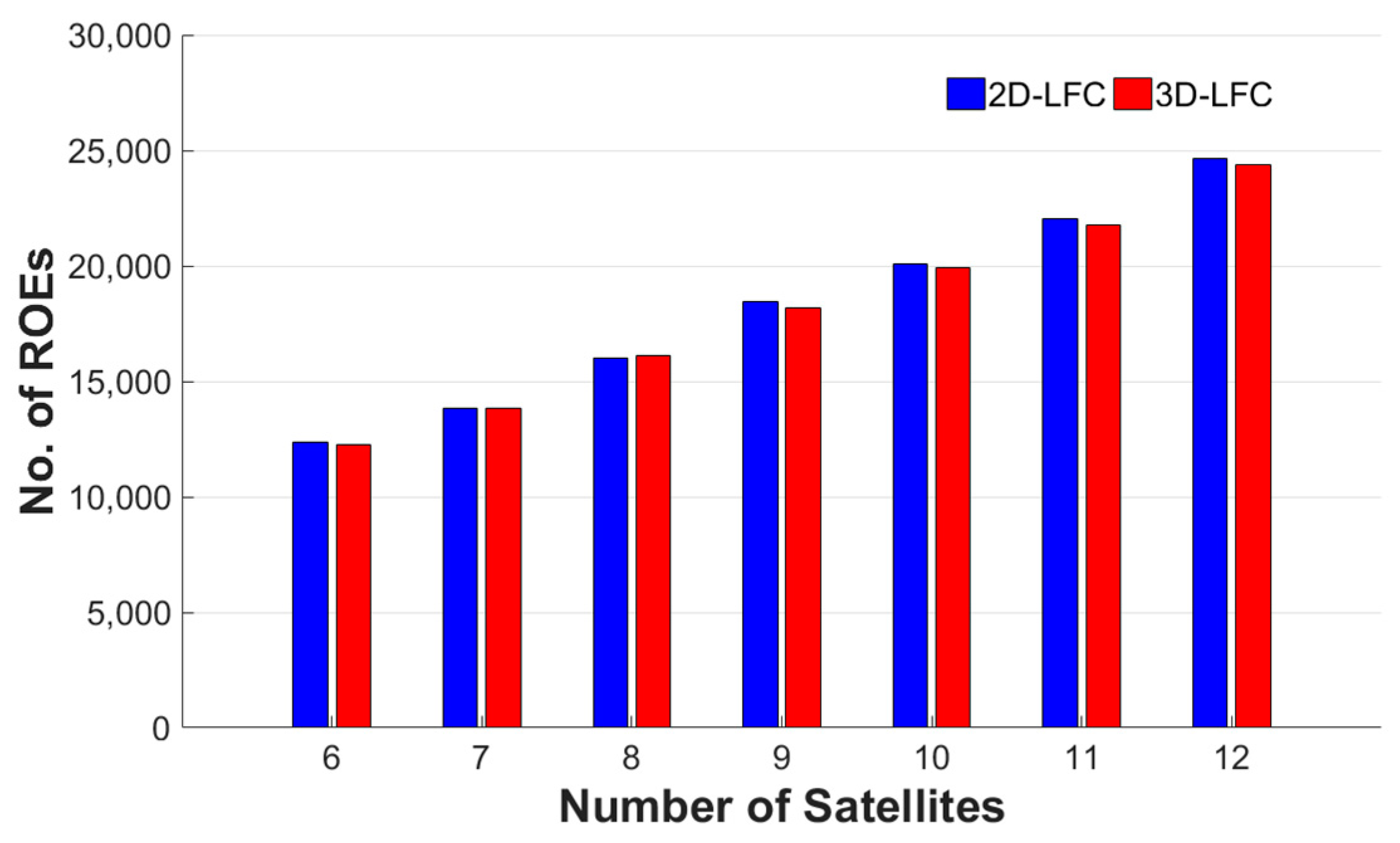
As to the comparison between the two constellation patterns, Asgarimehr et al. [
26] found that for a LEO constellation composed of six satellites, the daily number of GPS ROEs, which occur over the Asia and Pacific region observed by the optimized 2D-LFC, is larger than those observed by the optimized 3D-LFC. Our study further confirms that for a LEO constellation composed of
satellites, the optimized 2D-LFCs generally could observe more GNSS ROEs over the globe compared with the optimized 3D-LFCs. In Reference [
26], the altitudes of the circular orbits in the optimized 2D-LFC are lower than those of the elliptical orbits in the optimized 3D-LFC. In our study, the comparison between
Table 4 and
Table 5 also revealed that, for a LEO constellation composed of
satellites, with the whole globe as the target region of GNSS RO observation, all the circular orbits in the optimized 2D-LFC were lower in height than the elliptical orbits of the optimized 3D-LFC. Juang et al. [
24] found that high inclinations of LEO satellites are beneficial for a sufficient global coverage of the ROEs. All the optimal 2D-LFCs and 3D-LFCs were of high inclinations in our study, which are shown by
Table 4 and
Table 5.
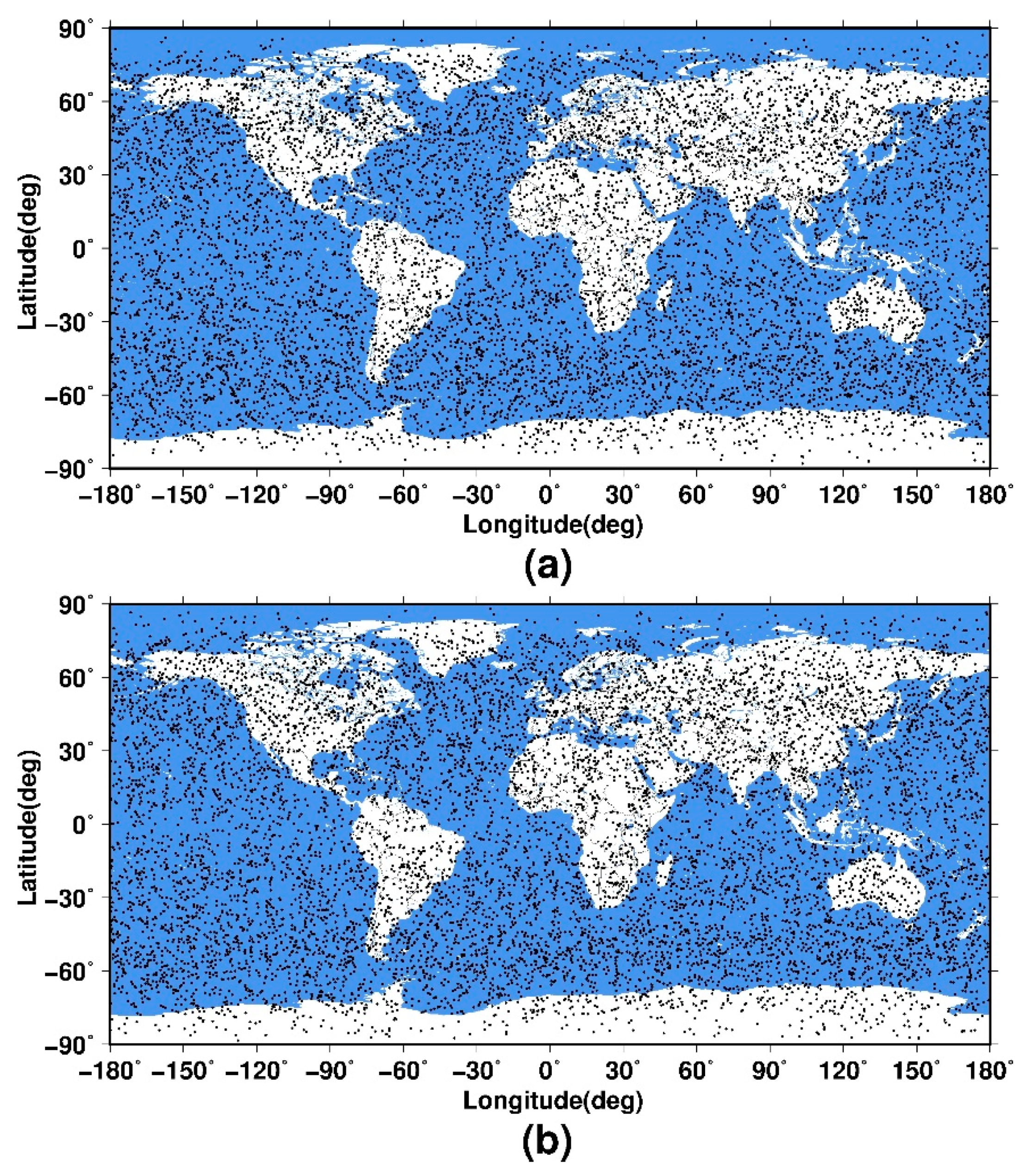
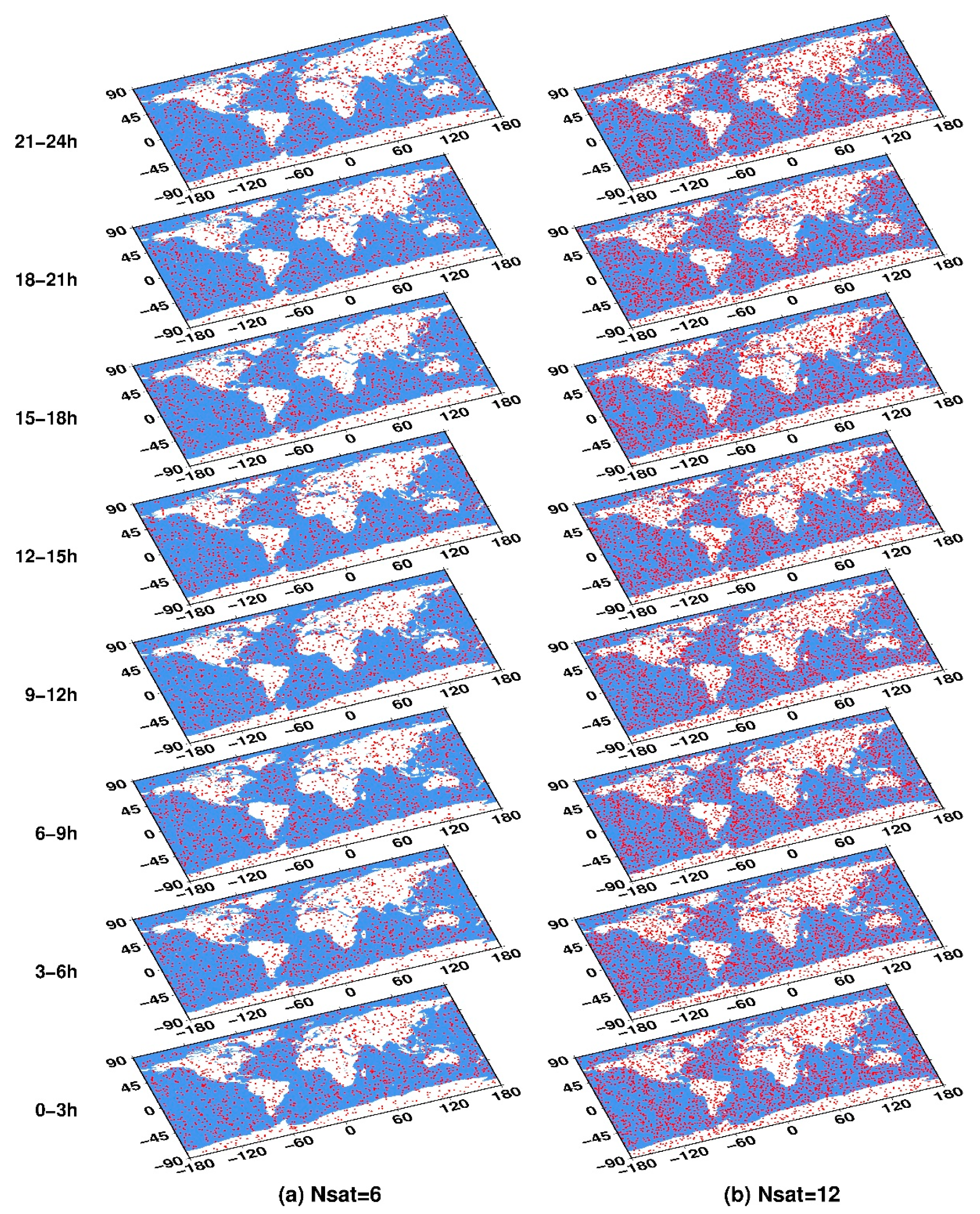
The comparisons of the COV mean values and its standard deviation between the two different constellation patterns show that, as the number of LEO satellites varies between 6 and 12, the GNSS ROEs observed by the optimized 2D-LFCs were generally more homogeneous in space and time compared to the optimized 3D-LFCs. The comparison of the optimized 6 satellite 2D-LFC and 3D-LFC with COSMIC further approved the superiority of the optimized 2D-LFC performance.
5. Conclusions
Exploiting the navigation signals from the GPS, GLONASS, BDS, Galileo, and QZSS, the present work focused on the search for a 2D-LFC and 3D-LFC composed of 6–12 satellites, which could provide optimal spatial and temporal distributions of GNSS ROEs over the globe. Two evolutionary algorithms were applied with a fitness function based on the concept of spatio-temporal point pattern. The better solution obtained by either of them, which corresponded to the highest fitness value, was selected. The space-filling performance of the final optimal LEO constellations were further evaluated using COVs of the distribution of ROEs.
The results showed that with the use of multi-GNSS signals, the optimized constellation configurations provided a sufficient number of ROEs with proper temporal and spatial distributions. For a certain number of LEO satellites, a PSO algorithm generally performed better than a GA. The optimal 2D-LFC generally resulted in higher fitness values compared to the optimal 3D-LFC. In other words, 2D-LFC observed more uniform ROE distributions in time and space. This is further confirmed by the comparisons of the mean and standard deviations values of the 3 h-COV for one day.
In our future work, the 2D necklace flower constellation, which accelerates the generation of constellations in the optimization process with more control in the design, will be taken into consideration and the proposed fitness function for the evolutionary algorithms will be further improved in the design of LEO constellations for GNSS RO mission.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}