4.1. Simulation Study
Simulations were undertaken to analyze the performance of the estimation algorithm. The results of these simulations were used to choose
R, the number of bootstrap samples, and
n, the number of matchu-ps in each sample, when the algorithm was applied to the actual dataset. A simple (but realistic) AMSR-E footprint (referred to as the imposed footprint hereafter) was used to generate simulated microwave measurements from 250,000 real high-resolution MODIS patches according to Equation (
3). The 250,000 patches were randomly selected from the approximately four million matchu-ps discussed in
Section 3.1, with the actual AMSR-E values being replaced by simulated values. For the imposed footprint, we used an elliptical Gaussian function with its major axis rotated 45
clockwise, about the vertical-axis with an aspect ratio of 1.74 (≈75/43) approximating the aspect ratio of the
AMSR-E channel. The footprint is normalized according to Equations (
5) and (
6). Microwave measurements were simulated with Equation (
3), using MODIS data as the ground truth, to which we added Gaussian white noise with a standard-deviation of 0.2 K. 0.05 K Gaussian white noise was added to the MODIS data in order to simulate the infrared instrument noise; i.e., the original MODIS field was taken as the true SST field and the simulated AMSR-E and MODIS fields were obtained from the ‘true’ field. The footprint was then estimated using the method described in
Section 3.2. Footprints were retrieved for three different sets of parameters
= (1; 250,000), (1; 2000), (2000; 2000).
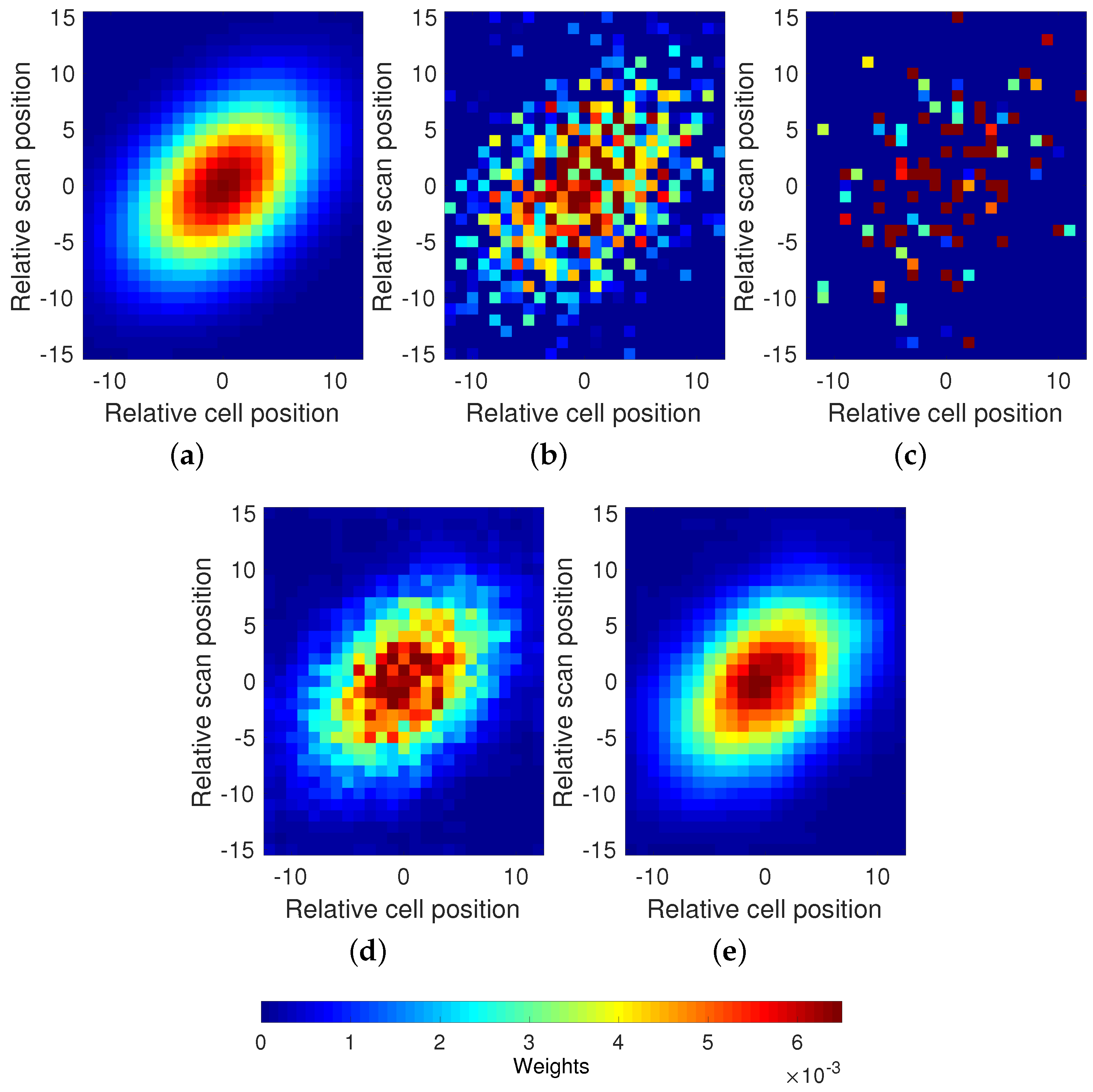
Figure 5a shows the imposed footprint, which we aim to reconstruct, used to generate the AMSR-E samples from the MODIS data. The retrieved footprints without bootstrap sampling (i.e.,
;
Figure 5b,c) were dominated by noise. The results of regularization (bootstrapping procedure;
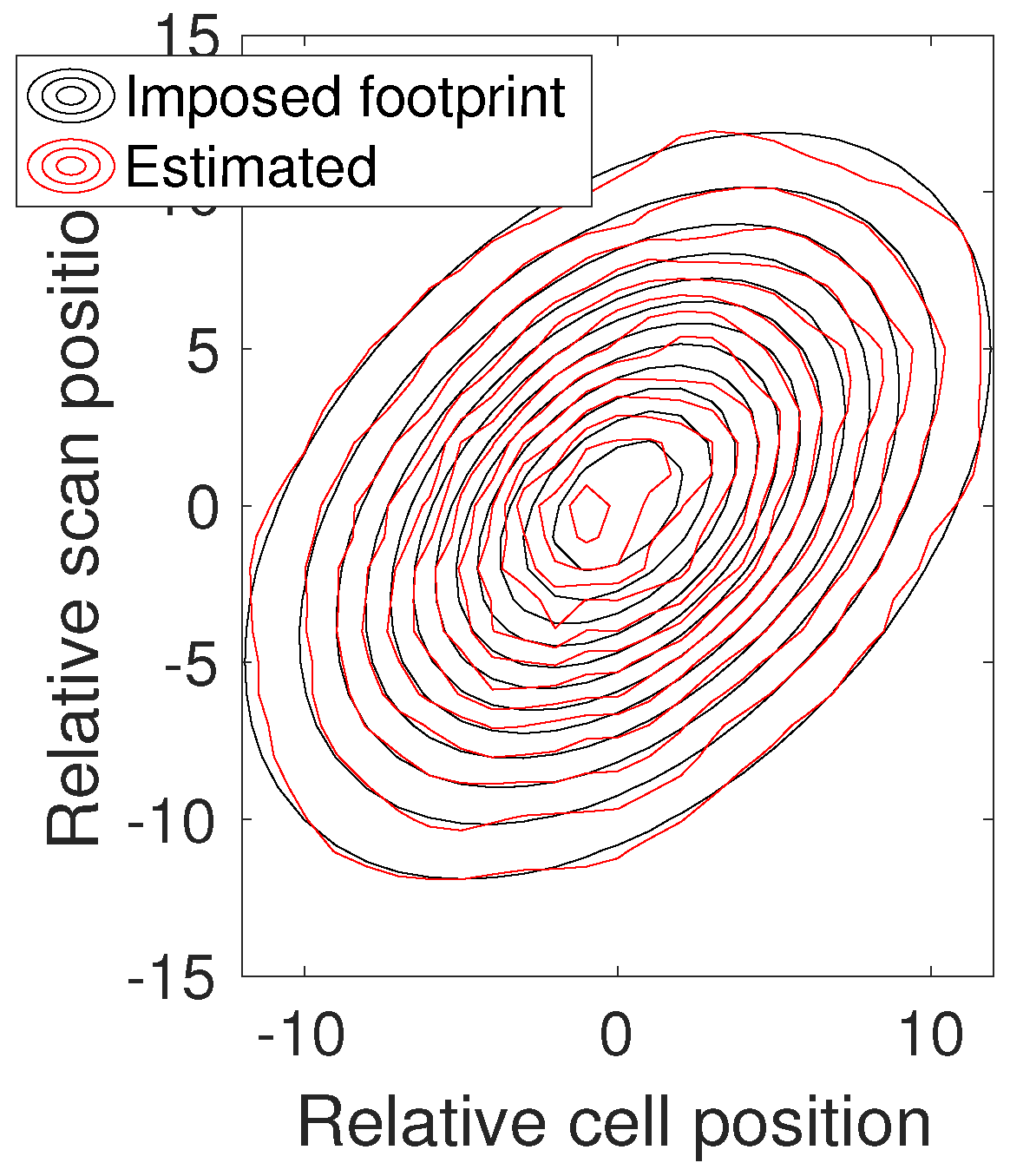
Figure 5d), showed a dramatic decrease in the noise of the retrieved footprint with the rotated Gaussian shape of the imposed footprint emerging clearly. Smoothing the retrieved footprint with a
moving average further reduced the noise yielding a close facsimile to the imposed footprint (
Figure 5e and
Figure 6).
4.2. AMSR-E Footprint Estimation
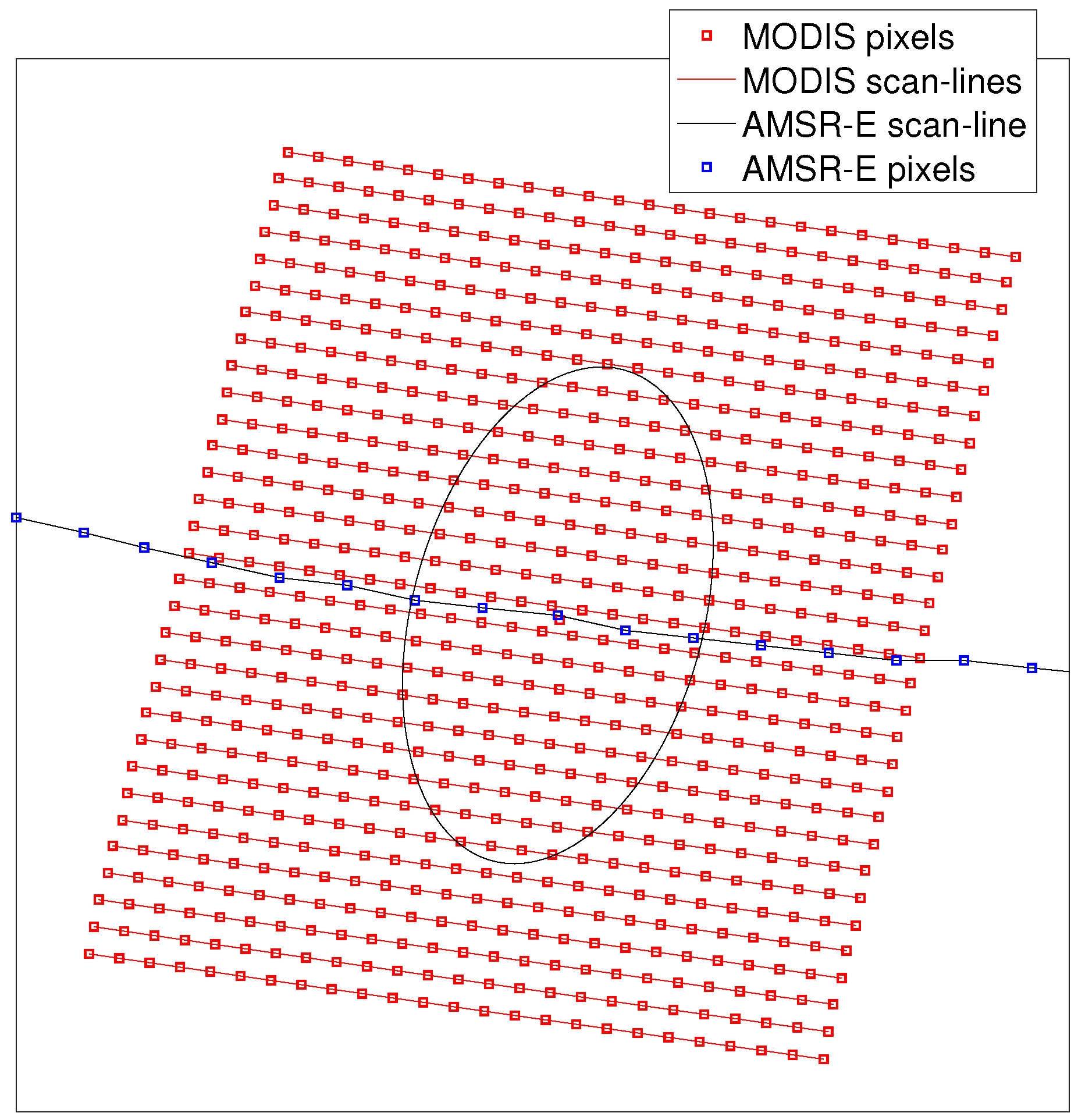
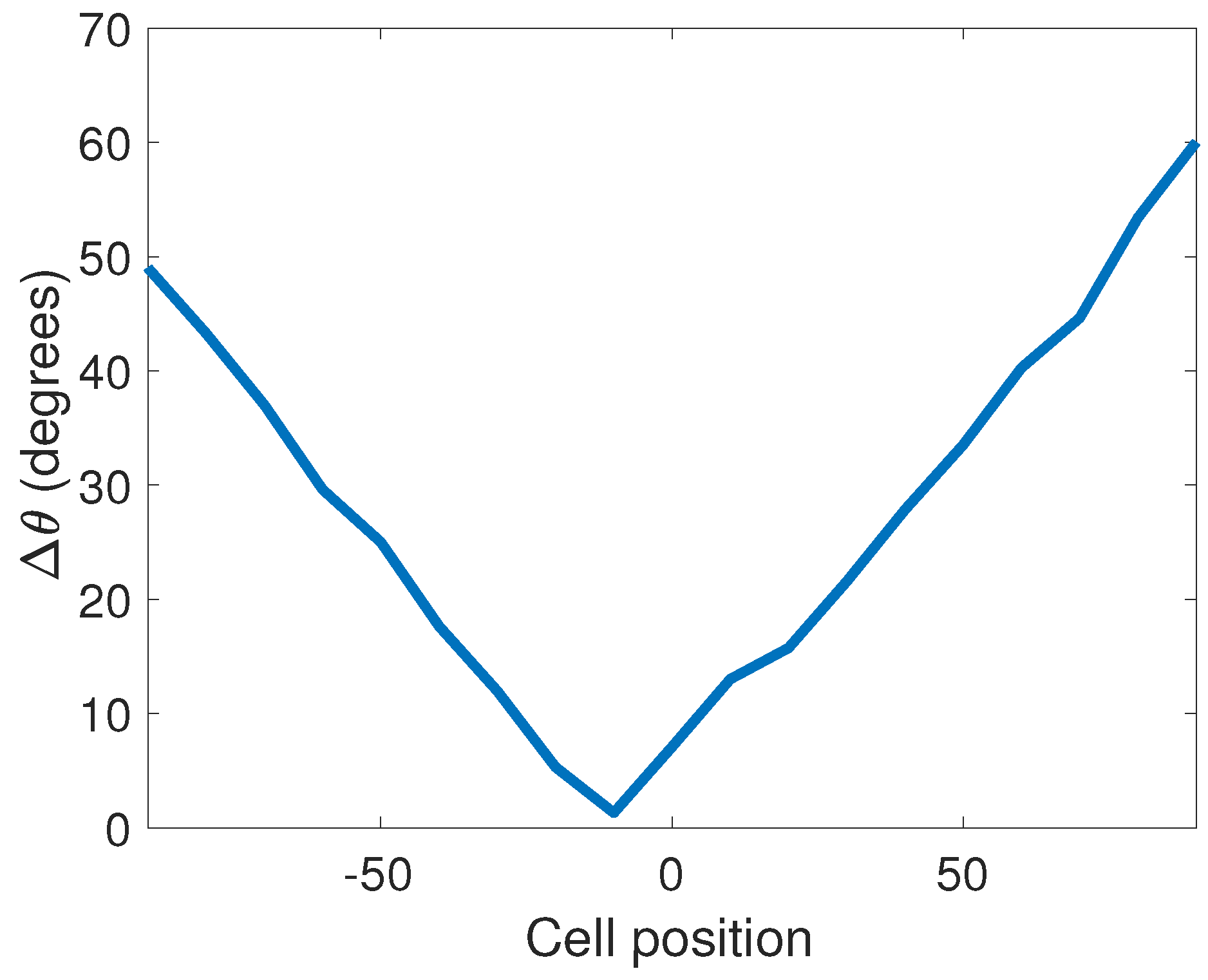
In this section we examine the retrieved AMSR-E SST footprint (the SST footprint henceforth to distinguish it from the footprint of individual spectral bands), as a function of AMSR-E cell position, latitude and year. Because the relative angle between the local MODIS coordinate axis and the orientation of the AMSR-E spectral footprint varies with cell position (
Figure 3), the orientation of the SST footprint depends on cell position; hence the decision to retrieve the SST footprint as a function of cell position. A latitudinal dependence could arise from a dependence on the target temperature or on orbital position. Finally, we examined the temporal dependence over the life of the sensor to determine whether or not the footprint changed with time. Recall that SST was determined from a combination of spectral channels and of polarizations for each channel and changes in any of the other channels and/or changes in the characteristics of the other retrieved parameters could impact the SST retrievals.
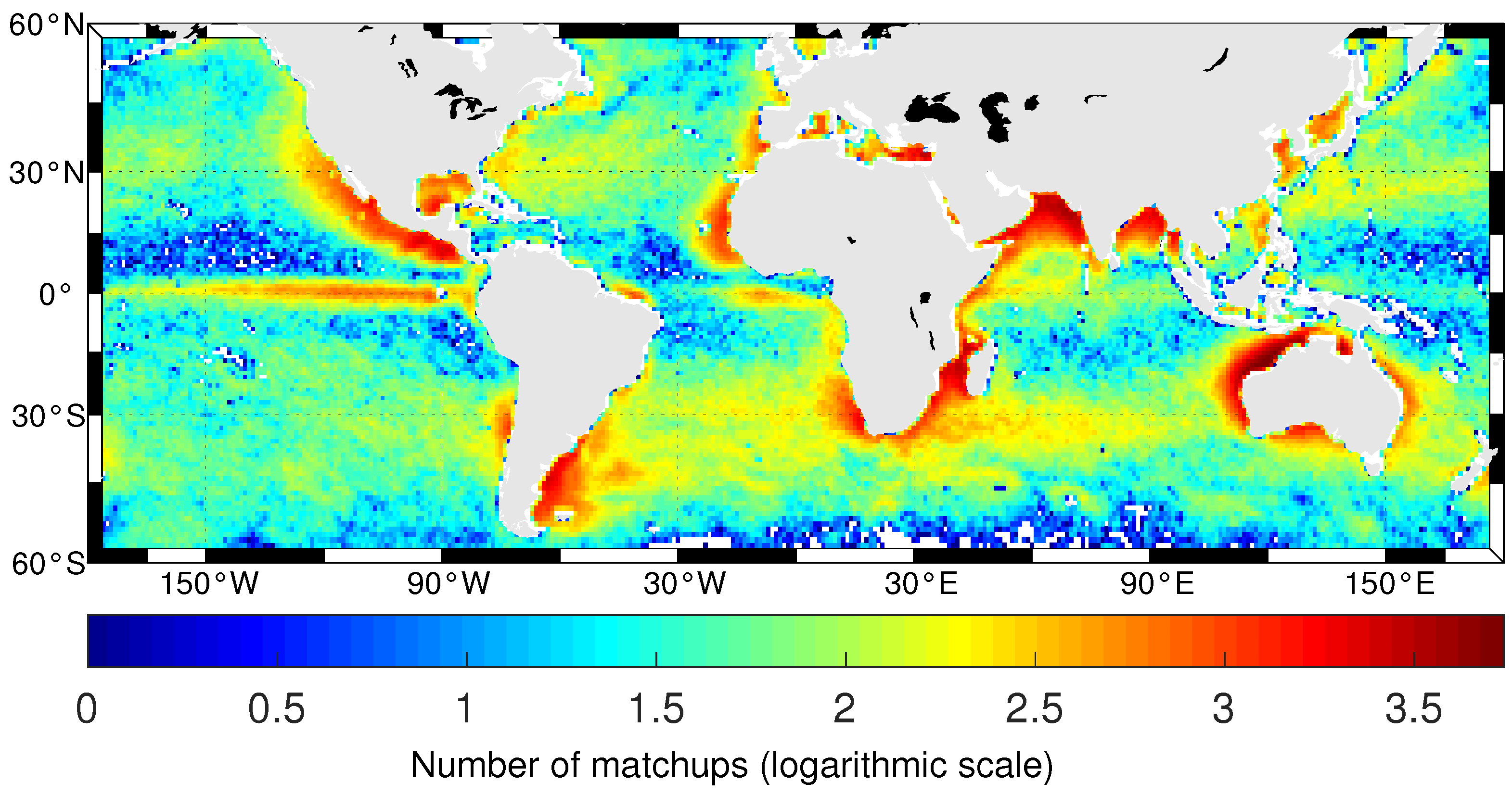
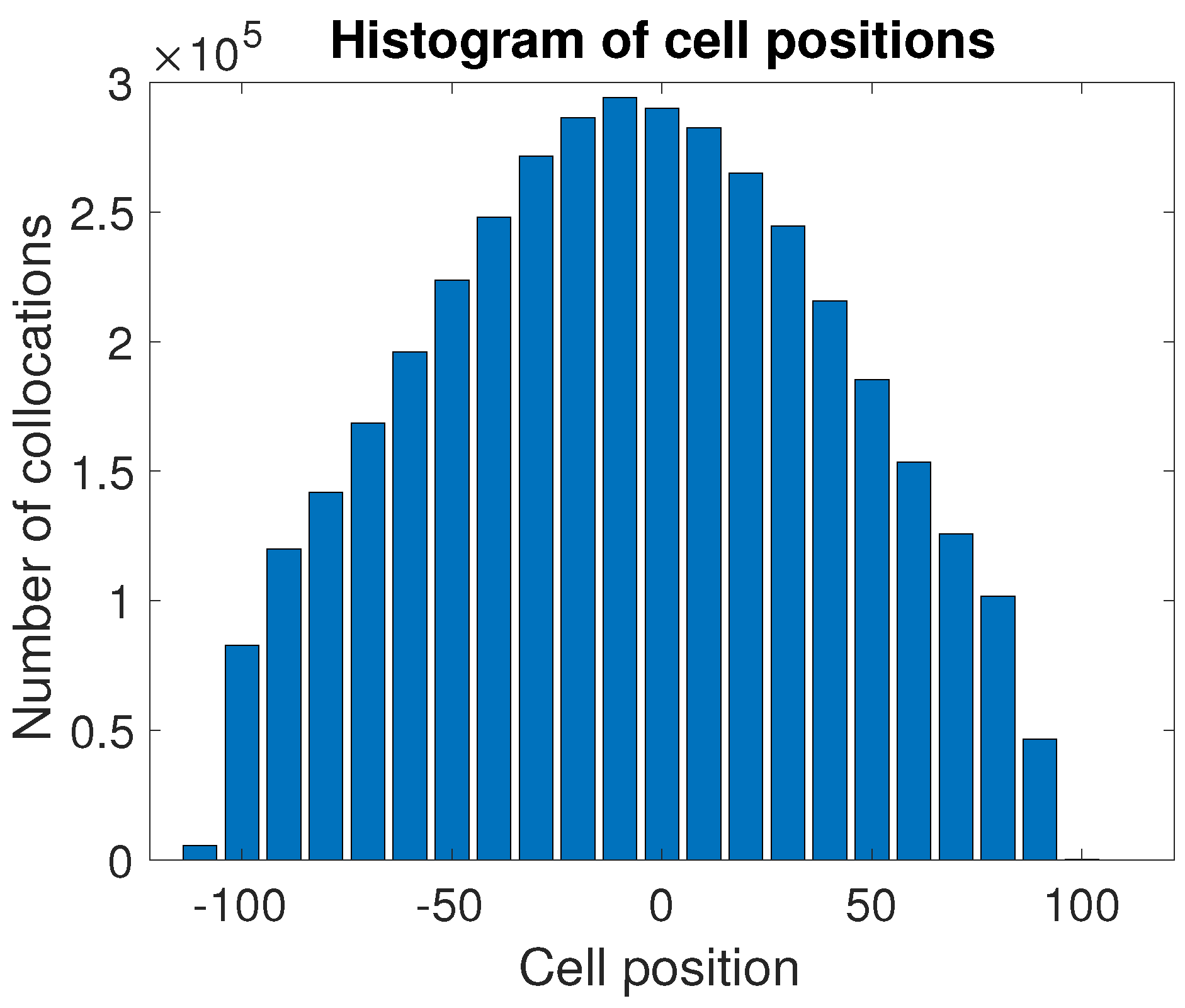
Cell position dependence. Matchups were binned by cell position (relative to nadir), with each bin containing a ten position range starting with cell position −115 (−115 to −106, −105 to −96,
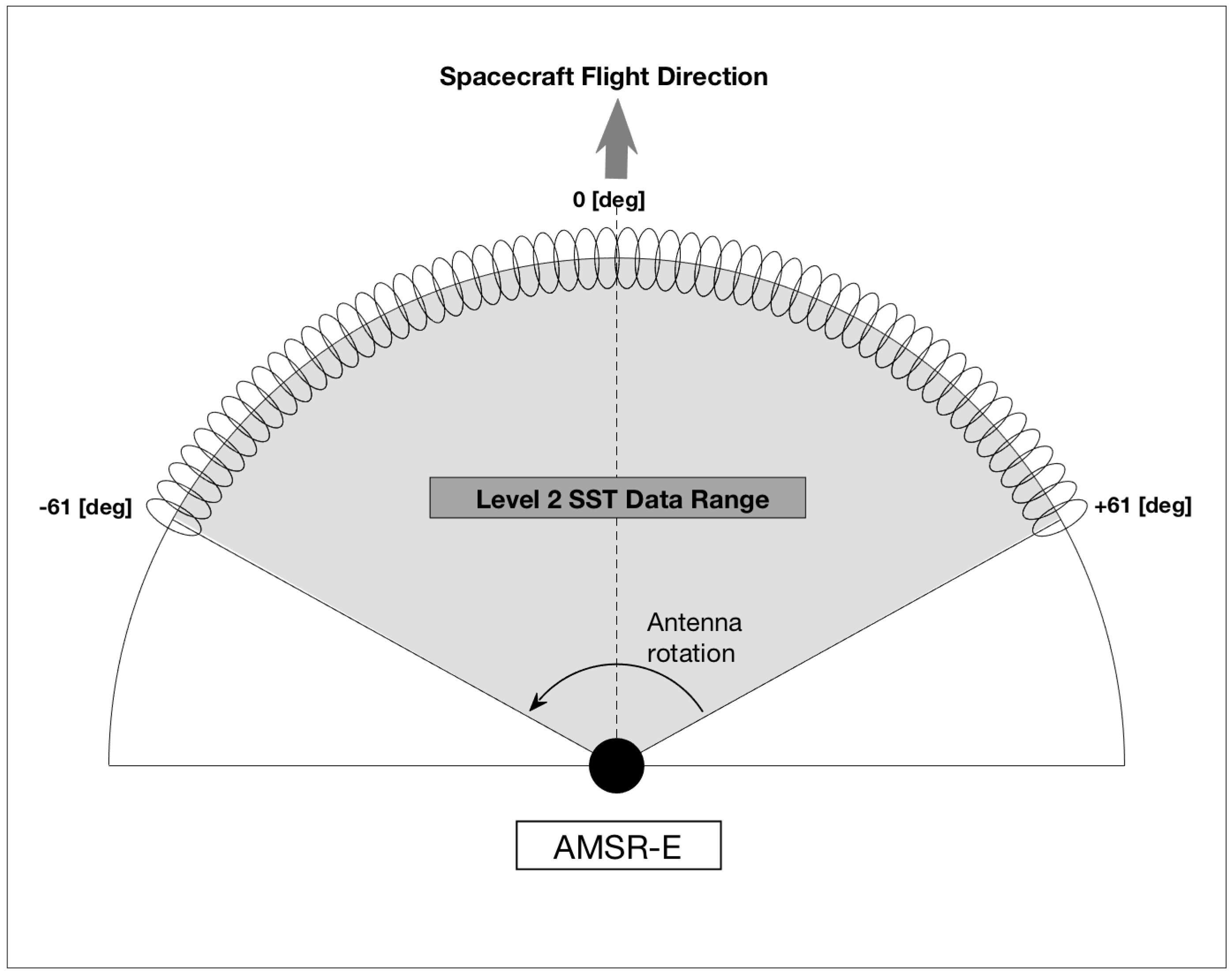
…, 85 to 94). Samples near the edge of the swath were not included in the analysis as they do not meet the quality criteria specified in
Section 2; hence cell position −115 (as opposed to −122) was used as the starting cell position and cell position 96 (as opposed to 122) as the ending number. The reason that the binning was not centered on cell position 0, which corresponds to nadir, is because the
angle between the MODIS and AMSR-E scans occurred at cell position 10, not 0; i.e., because the rotation axis of the antenna pointed slightly off nadir. Binning by ten cell positions provided a suitable number of matchups while adequately capturing any cross-track dependence (
Figure 7).
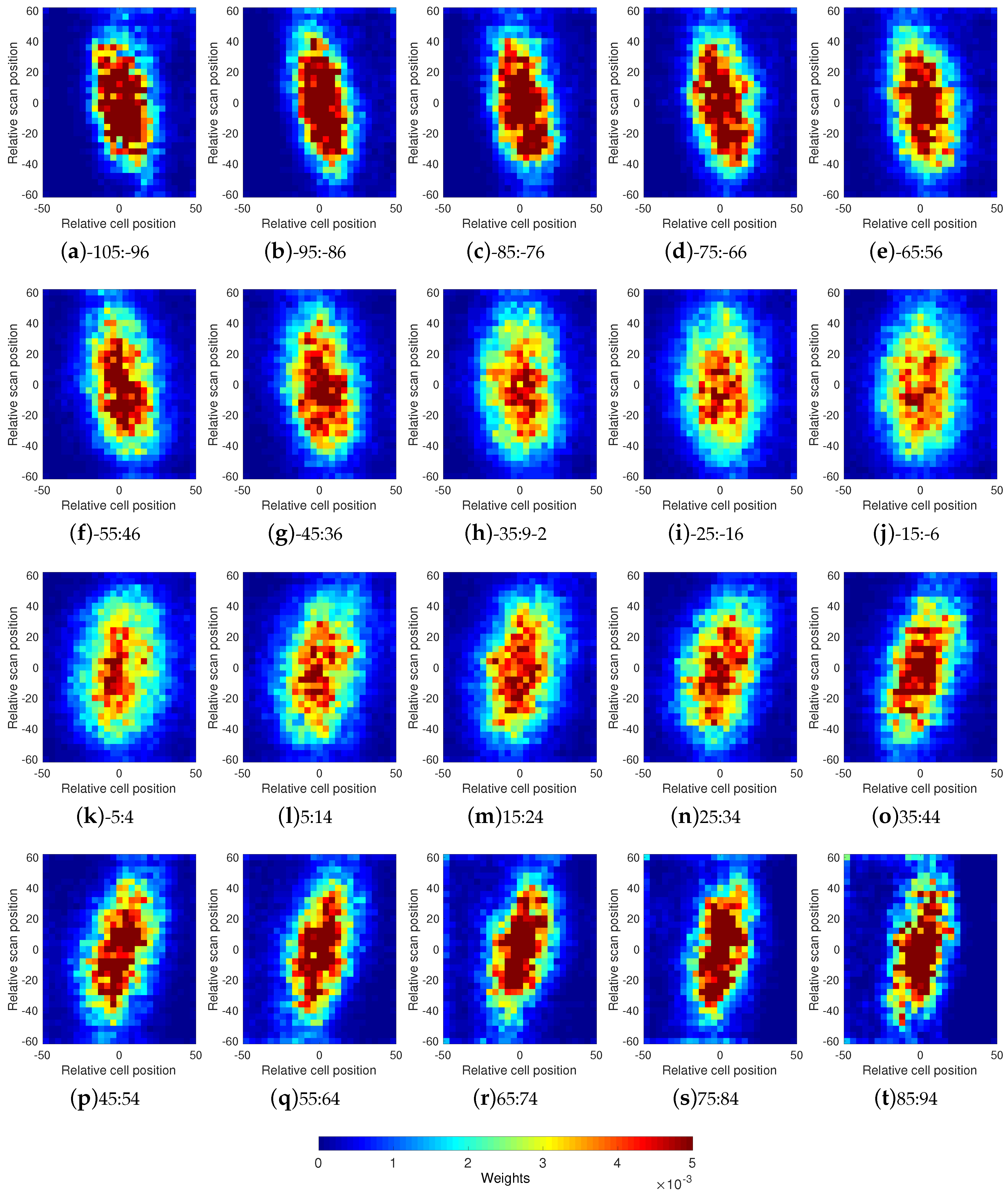
In
Figure 8, we show the empirically derived footprints for each cell position bin. The algorithm characterized by Equation (
7), with
(number of bootstrap repetitions) and
(sample size), was applied to the matchup datasets associated with each cell position bin. Only bins involving more than 40,000 matchups were considered (20 bins). The retrieved footprints all suggest a basic elliptical shape but they differed in two key ways. Firstly, the orientation of the ellipses changed with respect to the cell position. Secondly, as the distance from nadir increases, the AMSR-E footprint becomes narrower in the across-track direction with a concomitant increase in intensity—recall that the weighting function must sum to 1.0 (Equation (
7)) so the increase in intensity is consistent with the narrowing of the footprint. The varying rotation of angles results from two factors. First, the non-alignment of scan lines of the two sensors shown in
Figure 3. Second, the axes of the plots in
Figure 8 are in MODIS pixels, not in kilometers. Because the separation of MODIS pixels in the across-track direction increases with distance from nadir, the length of the horizontal axes increase. In contrast, the separation of MODIS pixels in the along-track direction changes little with distance from nadir, so the length of the vertical axes remain approximately the same from one end of the AMSR-E scan line to the other. The net effect of this is to decrease the magnitude of the apparent angles of the ellipse. The increase in intensity with distance from nadir results from the concomitant increase in the across-track spacing and in the size of MODIS pixels. The pixel intensity of the retrieved footprint at a given location is determined by the contribution of the sub-resolution MODIS SST element to the AMSR-E SST at the same location. Consequently, the larger the pixel size the more intense the contribution. Reassuringly, the footprints do not show a significant change in size in the along-track direction.
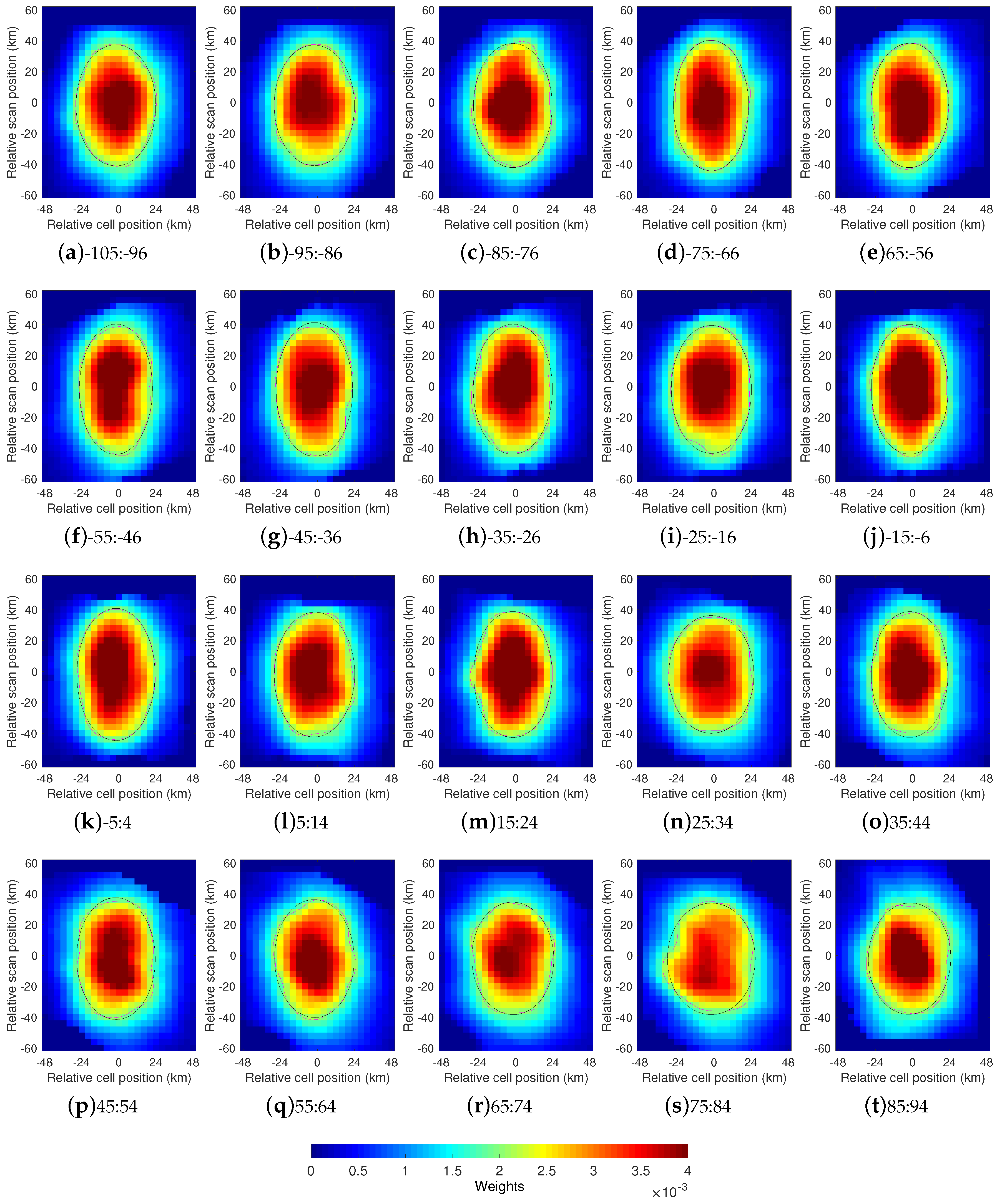
In the previous paragraph, we found that the retrieved footprint depended on the AMSR-E cell position and on the size of MODIS pixels. In order to remove these dependencies, so that the across-track footprint properties can be better studied and a mean footprint derived, the following correction procedure was undertaken. First, we applied a
pixel moving average to the across-track footprints (
Figure 8) in order to reduce the pixel-to-pixel noise. We then used the Matlab griddata function to transform the MODIS grid (with the x-axis parallel to scan lines, the y-axis parallel to the nadir track and grid spacing in pixels), in which the footprints are produced, to a Euclidean grid in kilometers, aligned with the instantaneous AMSR-E field of view. The results of this procedure are shown in
Figure 9. The transformations applied have clearly removed the cell position dependence of the retrieved footprints, with all of the footprints now generally similar. This is not surprising given that the angle between nadir and the direction to the AMSR-E samples is very nearly independent of cell position. The similarity of the retrieved footprints suggests that a more accurate canonical footprint can be obtained by averaging the footprints of
Figure 9.
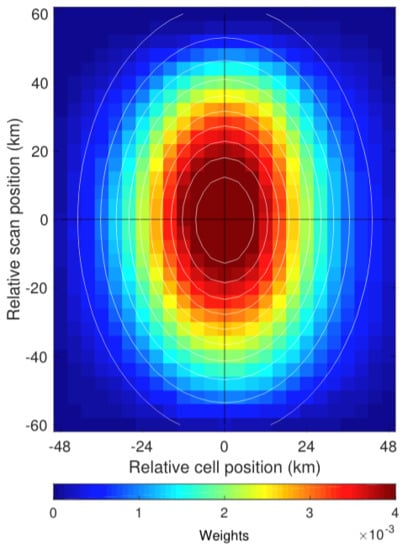
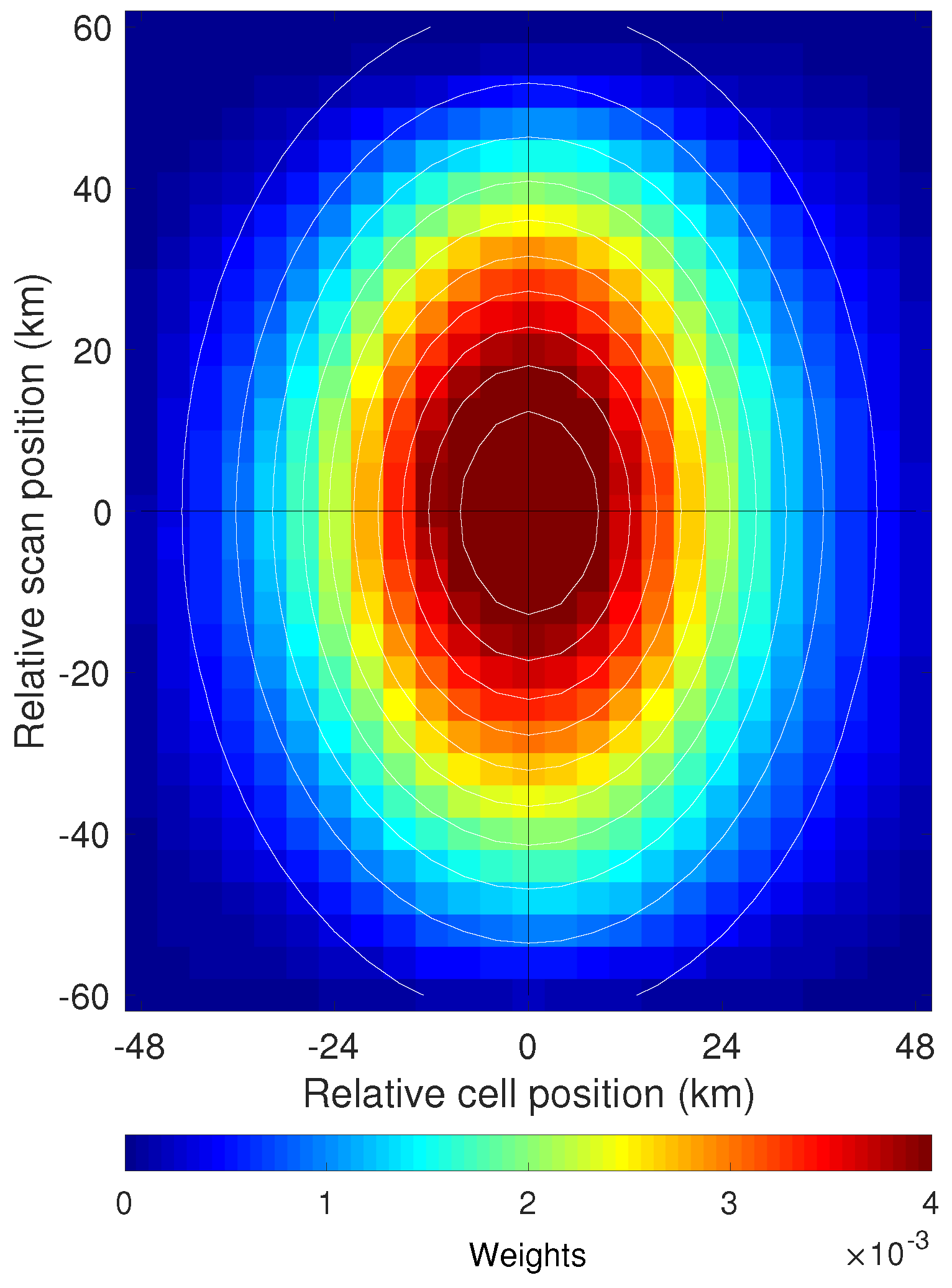
Figure 10 presents this average. A significant improvement was observed—the elliptical shape was considerably clearer and much smoother in comparison with the individual footprints. The standard error of the mean of the weights does not exceed
; the mean of these values over the entire footprint is
, well below estimated weights on the outer edge of the footprint. In what follows, the across-track averaged footprint,
f, is considered as the reference AMSR-E SST footprint to be used for the latitudinal and temporal analyses. This is also the footprint that we recommend using in other studies requiring knowledge of the characteristics of the AMSR-E SST footprint. (The change in notation from
H used to represent the footprint in Equations (
2)–(
7) to
f used in Equations (
9)–(
10), reflects the change from the footprint in satellite coordinates to the footprint in cartesian coordinates discussed above.) To facilitate quantitative comparisons, we render the reference footprint in functional form. Specifically, a curve of the form:
has been fit, in a least squares sense, to the retrieved mean AMSR-E footprint (
Figure 10). The best fit parameters are:
,
,
,
km and
km. The fitted model is represented as white contour lines superimposed on the mean footprint in
Figure 10. The parameter
indicates that the semi-major axis of the retrieved footprint is normal to the local tangent to the AMSR-E scan line. The angles obtained when averaging over bins on one side or the other of the nadir track were not statistically different from
either.
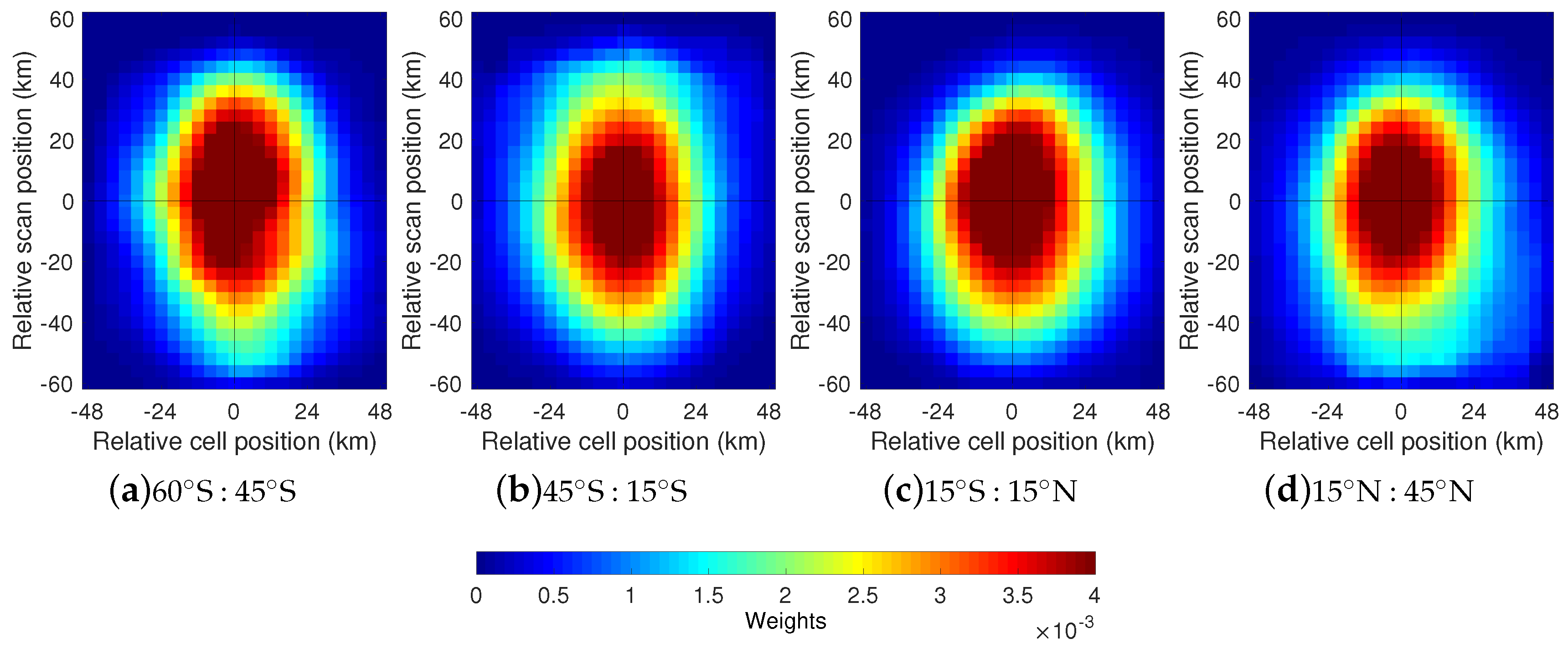
Latitudinal and temporal dependence. Each of the cell position bin matchup datasets was then binned into four latitudinal bands from
S to
N. For each of these bins, the across-track footprints were estimated using the procedure described above, normalized and averaged to obtain a footprint for the given latitudinal bin. The retrieved footprints are shown in
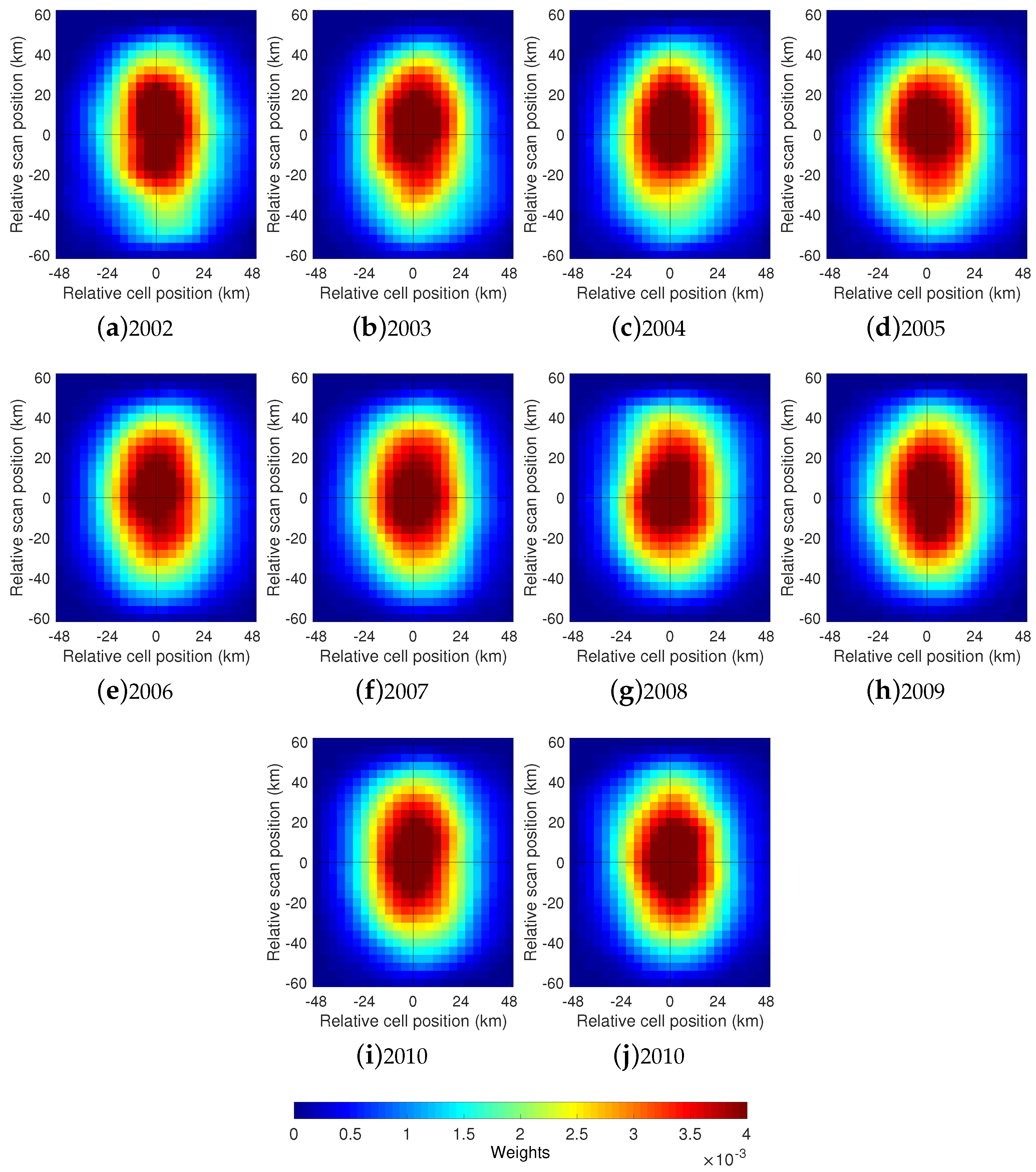
Figure 11. Temporal analysis of the footprint was undertaken similarly, except that the cell position bin matchup datasets were binned by year for each year of the 10-year AMSR-E mission (2002 through 2011). The annual across-track averaged footprints are shown in
Figure 12. The number of matchups used to derive the temporal and latitude-based footprints is, of course, reduced compared with number used to obtain the reference footprint, by approximately a factor of four in the latitudinal case and a factor of ten in the annual case, but the resulting footprints are still visually comparable to the reference footprint.
Statistical comparisons. In order to quantitatively compare the dependence of the footprint on cell position, latitude and year, we use two different statistics, one based on the mean absolute percentage deviation (MAPD), a measure of the deviation of a given footprint from a reference footprint as a percentage, and the other based on the aspect ratio of the best fit ellipse to the footprint, a measure of the deviation of a given footprint from a reference footprint based on shape. Both sets of statistics were determined for the footprints shown in
Figure 9 (cell position),
Figure 11 (latitude) and
Figure 12 (year). We begin with the MAPD statistic, defined as follows:
where
f is the footprint to evaluate (e.g., retrieved at a particular cell position) and
is the reference footprint, depicted in
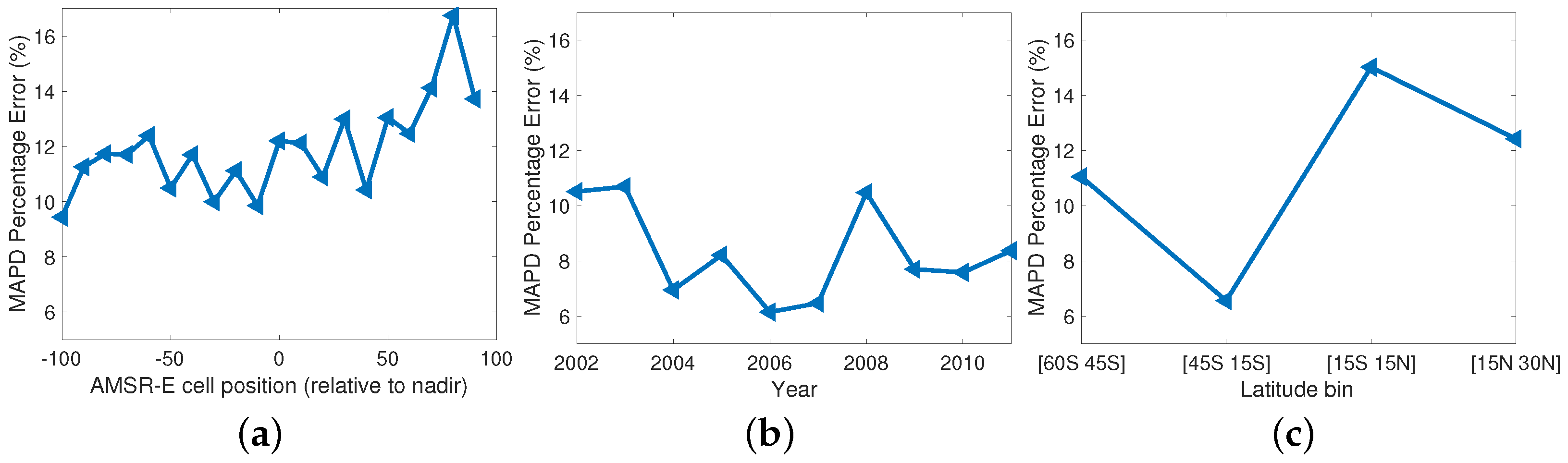
Figure 10. (MAPD was chosen as one of the two statistics because of the ease in its interpretation. Possible issues with very small values contributing an outsized share to MAPD were reduced by excluding the border of the footprint, where the weights are very low, before its estimation.) The results are shown in
Figure 13a for the across-track dependence,
Figure 13b for annual dependence and
Figure 13c for the latitudinal dependence. In all cases, the amplitude of the deviations is below
. The deviations are found to be smaller for the year-by-year estimates. This was expected considering that the footprints correspond to an average over all the cell positions. The best yearly MAPD value is around 6% with an average of
. The latitudinal footprints also result from across-track averaging but the associated deviations show more variability. This may be due to the variability in the SST fields; the smoother the field the larger the deviation of the retrieved footprint since the approach used here is not able to obtain an estimate of the footprint from a flat field. SST fields equatorward of 30
N/S tend to be more uniform that those in the subtropics. The across-track MAPD results tend to be relatively stable for negative cell positions and show an increasing trend with the increasing positive cell positions. The reason for this is not clear.
The second method for comparing footprints is based on the aspect ratio of the footprint determined as follows. For each estimated footprint, we extracted the
contour-line (magenta curves in
Figure 9 for the along-scan footprints). An ellipse was then least squares fitted to the extracted contour (black curves in
Figure 9) and the aspect ratio,
, of this ellipse was calculated, where
is the length of the semi-major axis and
that of the semi-minor axis. The 0.002 contour line used in these fits corresponds to one half of the maximum value of the mean footprint (half of the fitted value of
a in Equation (
9)). The same procedure, applied to the mean footprint (
Figure 10), resulted in an aspect ratio of
; somewhat smaller than the 1.74 value of the AMSR-E
bands.
Figure 14 shows the aspect ratio by (a) cell position, (b) year and (c) latitude. The footprint was stable for the entire mission at approximately the value of the reference footprint. There also appears to be little latitudinal dependence. By contrast, the cell position plot shows a trend from one side of nadir to the other. This trend is not understood but it is likely related to the suggestion of an across-track trend in MAPD discussed in the previous paragraph.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}