UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring


Abstract
:1. Introduction
2. Materials and Methods
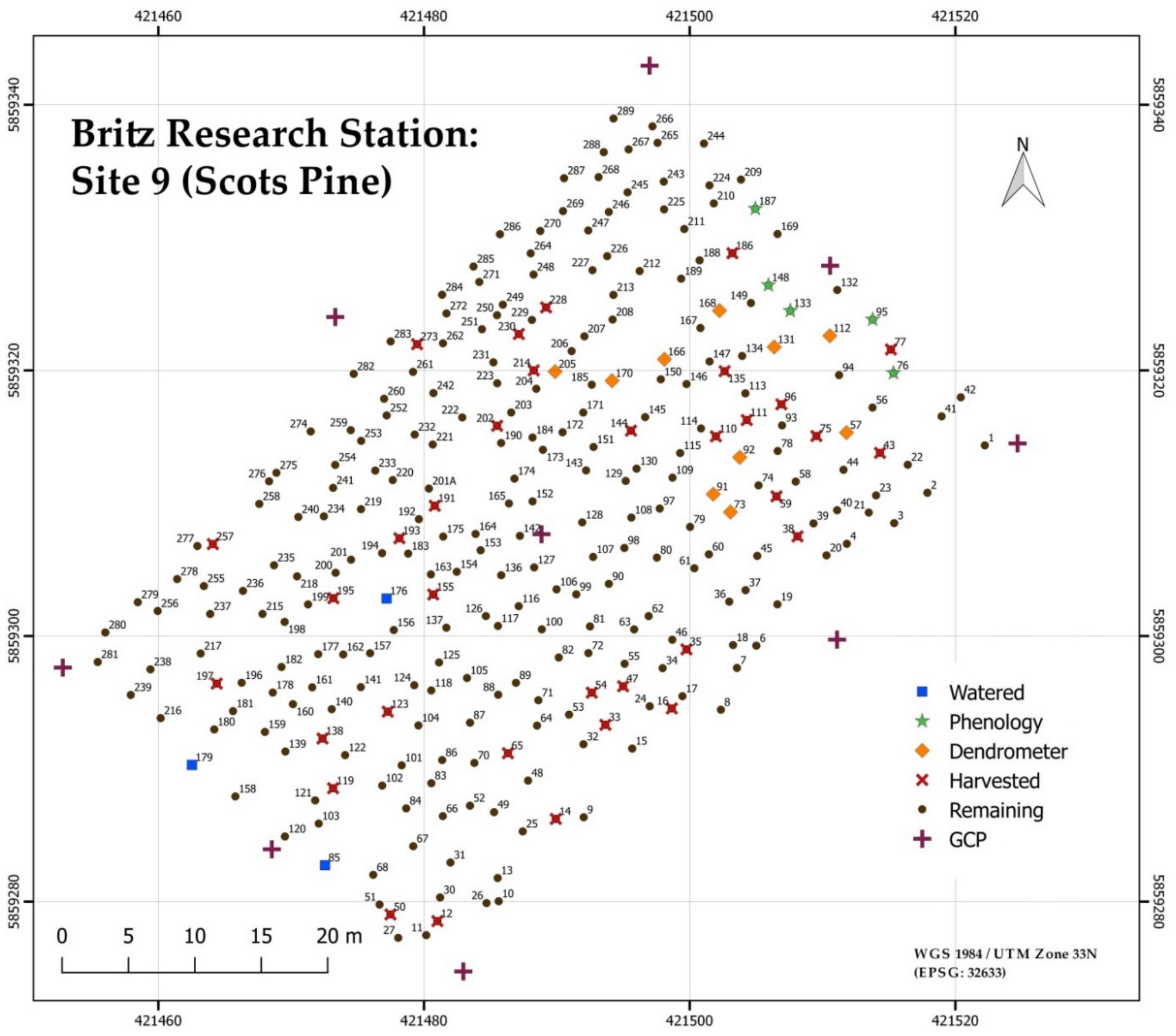
2.1. Study Site
2.2. Field Measurements
2.3. Ground Control Points and Tree Stem Positions
2.4. Remotely Sensed Data Acquisition
2.5. Processing and Tree Height Extraction
2.6. Statistical Analysis
3. Results
3.1. Processing Results and Statistical Analysis
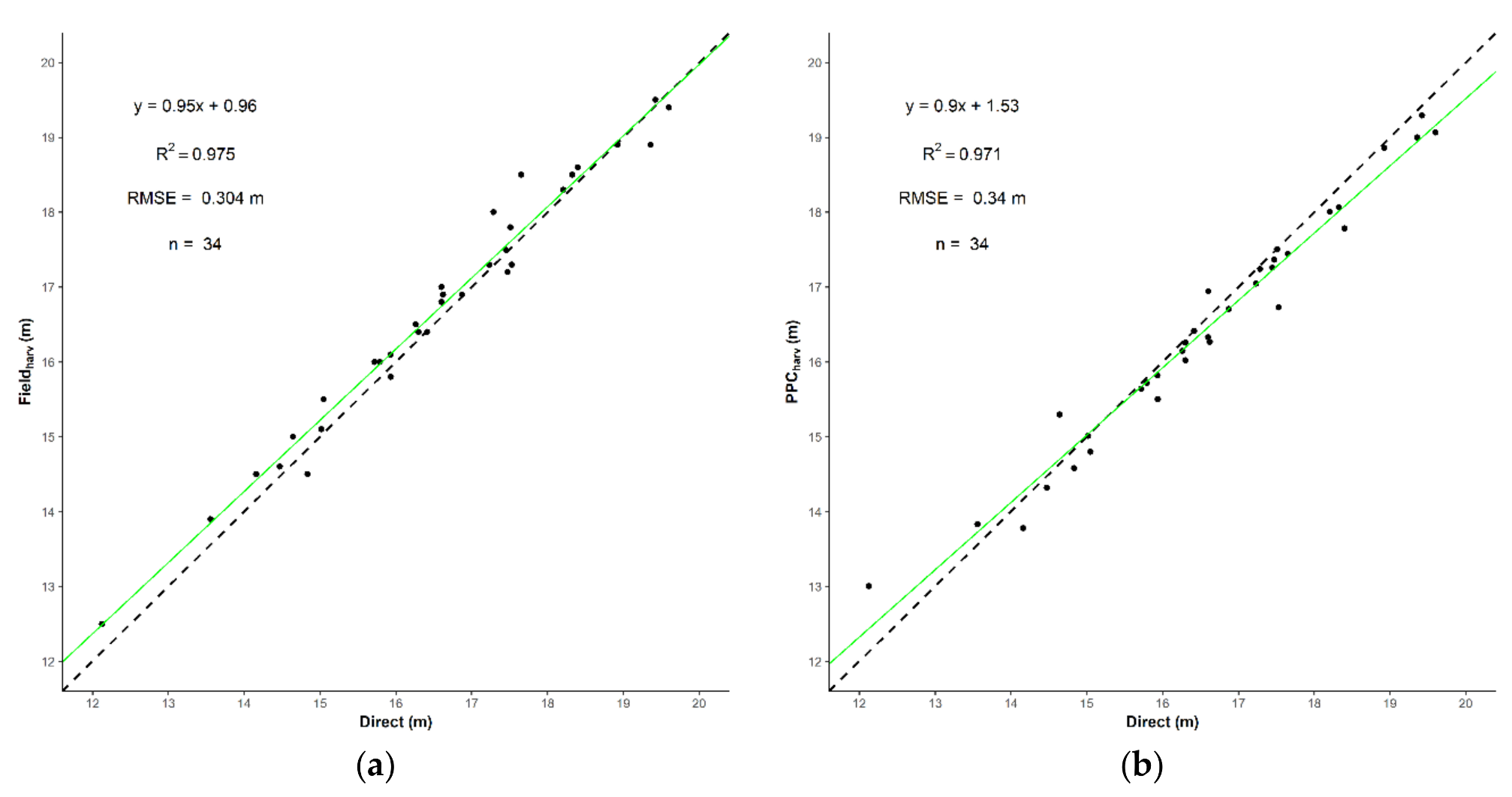
3.2. Validation with Direct Measurements
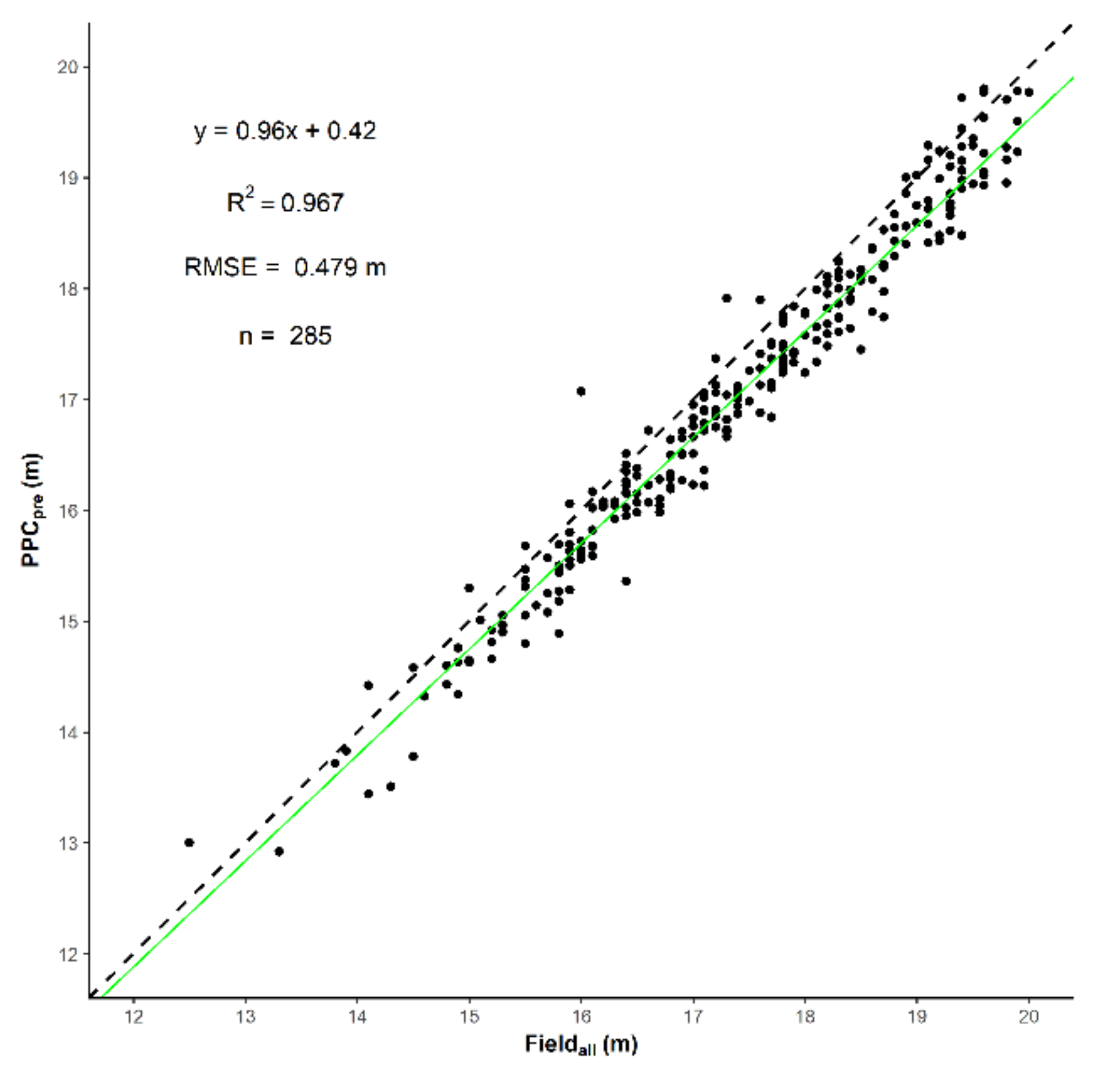
3.3. Validation with Indirect Measurements
3.4. Comparison of Photogrammetric Datasets
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kershaw, J.A.; Ducey, M.J.; Beers, T.W.; Husch, B. Forest Mensuration, 5th ed.; John Wiley & Sons: Chichester, UK; Hoboken, NJ, USA, 2016; ISBN 978-1-118-90203-5. [Google Scholar]
- West, P.W. Tree and Forest Measurement; Springer International Publishing: Cham, Switzerland, 2015; ISBN 978-3-319-14707-9. [Google Scholar]
- Thenkabail, P.S. Land Resources Monitoring, Modeling, and Mapping with Remote Sensing; CRC Press: Boca Raton, FL, USA, 2015; ISBN 978-1-4822-1798-8. [Google Scholar]
- Andersen, H.-E.R.; Stephen, E.; McGaughey, R.J. A rigorous assessment of tree height measurements obtained using airborne lidar and conventional field methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Bolte, A.; Ammer, C.; Löf, M.; Madsen, P.; Nabuurs, G.-J.; Schall, P.; Spathelf, P.; Rock, J. Adaptive forest management in central Europe: Climate change impacts, strategies and integrative concept. Scand. J. For. Res. 2009, 24, 473–482. [Google Scholar] [CrossRef]
- Spathelf, P.; Stanturf, J.; Kleine, M.; Jandl, R.; Chiatante, D.; Bolte, A. Adaptive measures: Integrating adaptive forest management and forest landscape restoration. Ann. For. Sci. 2018, 75, 55. [Google Scholar] [CrossRef]
- Picard, N.; Saint-André, L.; Henry, M. Manual for Building Tree Volume and Biomass Allometric Equations from Filed Measurement to Prediction; Food and Agriculture Organization of the United Nations (FAO): Rome, Italy, 2012; ISBN 978-92-5-107347-6. [Google Scholar]
- Van Laar, A.; Akça, A. Forest Mensuration; Springer: Dordrecht, The Netherlands, 2007; ISBN 978-1-4020-5990-2. [Google Scholar]
- Watts, S.B.; Tolland, L. Forestry Handbook for British Columbia; Part 2; Forestry Undergraduate Society, University of British Columbia: Vancouver, BC, Canada, 2005; ISBN 978-0-88865-447-2. [Google Scholar]
- Bragg, D.C. Accurately Measuring the Height of (Real) Forest Trees. J. For. 2014, 112, 51–54. [Google Scholar] [CrossRef]
- Apostol, B.; Lorent, A.; Petrila, M.; Gancz, V.; Badea, O. Height Extraction and Stand Volume Estimation Based on Fusion Airborne LiDAR Data and Terrestrial Measurements for a Norway Spruce [Picea abies (L.) Karst.] Test Site in Romania. Not. Bot. Horti Agrobot. Cluj-Napoca 2016, 44, 313–323. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Smith, A.M.; Hudak, A.T.; Gessler, P.E.; Vierling, L.A.; Crookston, N.L. Automated estimation of individual conifer tree height and crown diameter via two-dimensional spatial wavelet analysis of lidar data. Can. J. Remote Sens. 2006, 32, 153–161. [Google Scholar] [CrossRef]
- Rogers, E.J. Estimating tree heights from shadows on vertical aerial photographs. J. For. 1949, 47, 182–191. [Google Scholar]
- Spurr, S.H. Photogrammetry and Photo-Interpretation. With a section on Applications to Forestry, 2nd ed.; Ronald Press: New York, NY, USA, 1960; ISBN 60-9662. [Google Scholar]
- St-Onge, B.; Audet, F.-A.; Bégin, J. Characterizing the Height Structure and Composition of a Boreal Forest Using an Individual Tree Crown Approach Applied to Photogrammetric Point Clouds. Forests 2015, 6, 3899–3922. [Google Scholar] [CrossRef]
- Guerra-Hernandez, J.; Gonzalez-Ferreiro, E.; Sarmento, A.; Silva, J.; Nunes, A.; Correia, A.C.; Fontes, L.; Tomé, M.; Diaz-Varela, R. Short Communication. Using high resolution UAV imagery to estimate tree variables in Pinus pinea plantation in Portugal. For. Syst. 2016, 25, eSC09. [Google Scholar] [CrossRef]
- Maltamo, M.; Næsset, E.; Vauhkonen, J. (Eds.) Forestry Applications of Airborne Laser Scanning; Managing Forest Ecosystems; Springer Netherlands: Dordrecht, The Netherlands, 2014; Volume 27, ISBN 978-94-017-8662-1. [Google Scholar]
- Næsset, E.; Gobakken, T.; Holmgren, J.; Hyyppä, H.; Hyyppä, J.; Maltamo, M.; Nilsson, M.; Olsson, H.; Persson, Å.; Söderman, U. Laser scanning of forest resources: The nordic experience. Scand. J. For. Res. 2004, 19, 482–499. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An International Comparison of Individual Tree Detection and Extraction Using Airborne Laser Scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef]
- Huanmin, L.; Erxue, C.; Jian, C.; Xiaowen, L. Forest height estimation methods using polarimetric SAR interferometry. J. Remote Sens. 2010, 14, 806–821. [Google Scholar]
- Pohl, C.; Loong, C.K. In-situ Data Collection for Oil Palm Tree Height Determination using Synthetic Aperture Radar. Available online: https://iopscience.iop.org/article/10.1088/1755-1315/34/1/012027 (accessed on 28 March 2019).
- Hyyppä, J.; Mielonen, T.; Hyyppä, H.; Maltamo, M.; Yu, X.; Honkavaara, E.; Kaartinen, H. Using individual tree crown approach for forest volume extraction with aerial images and laser point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, W19. [Google Scholar]
- Jucker, T.; Caspersen, J.; Chave, J.; Antin, C.; Barbier, N.; Bongers, F.; Dalponte, M.; van Ewijk, K.Y.; Forrester, D.I.; Haeni, M.; et al. Allometric equations for integrating remote sensing imagery into forest monitoring programmes. Glob. Chang. Biol. 2017, 23, 177–190. [Google Scholar] [CrossRef] [PubMed]
- Corona, P.; Chianucci, F.; Quatrini, V.; Civitarese, V.; Clementel, F.; Costa, C.; Floris, A.; Menesatti, P.; Puletti, N.; Sperandio, G.; et al. Precision forestry: Concepts, tools and perspectives in Italy. For. Riv. Selvic. Ed. Ecol. For. 2017, 14, 1–12. [Google Scholar] [CrossRef]
- Dash, J.; Pont, D.; Brownlie, R.; Dunningham, A.; Watt, M.; Pearse, G. Remote sensing for precision forestry. N. Z. J. For. 2016, 60, 15. [Google Scholar]
- Holopainen, M.; Vastaranta, M.; Hyyppä, J. Outlook for the Next Generation’s Precision Forestry in Finland. Forests 2014, 5, 1682–1694. [Google Scholar] [CrossRef]
- Smaltschinski, T.; Becker, G. Precision Forestry und forstliche Wertschöpfungskette; Institut für Forstnutzung und Forstliche Arbeitswissenschaft: Freiburg, Germany, 2009; p. 4. [Google Scholar]
- Šumarstvo. Precision Forestry—Definition and Technologies. Šumarski List 2010, 134, 603–610. [Google Scholar]
- Taylor, S.E.; Veal, M.W.; Grift, T.E.; McDonald, T.P.; Corley, F.W. Precision Forestry: Operational Tactics For Today And Tomorrow. In Proceedings of the International meeting of the Council on Forest Engineering, Schaegl, Austria, 5–9 October 2002; Volume 7. [Google Scholar]
- Moskal, L.M.; Erdody, T.; Kato, A.; Richardson, J.; Zheng, G.; Briggs, D. Lidar Applications in Precision Forestry. Proc. Silvilaser 2009, 11, 154–163. [Google Scholar]
- White, J.; Coops, N.; Wulder, M.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Ferretti, M.; Fischer, R. (Eds.) Developments in environmental science. In Forest Monitoring: Methods for Terrestrial Investigations in Europe with an Overview of North America and Asia, 1st ed.; Elsevier: Amsterdam, The Netherlands; Boston, MA, USA, 2013; ISBN 978-0-08-098222-9. [Google Scholar]
- Eisenbeiß, H. Mitteilungen/Institut für Geodäsie und Photogrammetrie an der Eidgenössischen Technischen Hochschule Zürich. In UAV Photogrammetry; ETH, Inst. für Geodäsie und Photogrammetrie: Zürich, Switzerland, 2009; ISBN 978-3-906467-86-3. [Google Scholar]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Dempewolf, J.; Nagol, J.; Hein, S.; Thiel, C.; Zimmermann, R. Measurement of Within-Season Tree Height Growth in a Mixed Forest Stand Using UAV Imagery. Forests 2017, 8, 231. [Google Scholar] [CrossRef]
- Liu, G.; Wang, J.; Dong, P.; Chen, Y.; Liu, Z. Estimating Individual Tree Height and Diameter at Breast Height (DBH) from Terrestrial Laser Scanning (TLS) Data at Plot Level. Forests 2018, 9, 398. [Google Scholar] [CrossRef]
- Mielcarek, M.; Stereńczak, K.; Khosravipour, A. Testing and evaluating different LiDAR-derived canopy height model generation methods for tree height estimation. Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 132–143. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Estimating plot-level tree heights with lidar: Local filtering with a canopy-height based variable window size. Comput. Electron. Agric. 2002, 37, 71–95. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2016, 38, 2392–2410. [Google Scholar] [CrossRef]
- Gatziolis, D.; Fried, J.S.; Monleon, V.S. Challenges to estimating tree height via LiDAR in closed-canopy forests: A parable from western Oregon. For. Sci. 2010, 56, 139–155. [Google Scholar]
- Imai, Y.; Setojima, M.; Yamagishi, Y.; Fujiwara, N. Tree-height measuring characteristics of urban forests by LiDAR data different in resolution. In Proceedings of the International Society of Photogrammetry and Remote Sensing Conference, Istanbul, Turkey, 12–23 July 2004; Volume 4, pp. 12–23. [Google Scholar]
- Larjavaara, M.; Muller-Landau, H.C. Measuring tree height: A quantitative comparison of two common field methods in a moist tropical forest. Methods Ecol. Evol. 2013, 4, 793–801. [Google Scholar] [CrossRef]
- Boi, M. Efficiency of ultrasonic Vertex III hypsometer compared to the most commonly used hypsometers in Croatian forestry. Croat. J. For. Eng. 2005, 13, 91–99. [Google Scholar]
- Butt, N.; Slade, E.; Thompson, J.; Malhi, Y.; Riutta, T. Quantifying the sampling error in tree census measurements by volunteers and its effect on carbon stock estimates. Ecol. Appl. 2013, 23, 936–943. [Google Scholar] [CrossRef] [PubMed]
- Sibona, E.; Vitali, A.; Meloni, F.; Caffo, L.; Dotta, A.; Lingua, E.; Motta, R.; Garbarino, M. Direct Measurement of Tree Height Provides Different Results on the Assessment of LiDAR Accuracy. Forests 2016, 8, 7. [Google Scholar] [CrossRef]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Liu, J.; Feng, Z.; Chen, R.; Hyyppä, J. Is field-measured tree height as reliable as believed—A comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in a boreal forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Müller, J.; Bolte, A. The use of lysimeters in forest hydrology research in north-east Germany. Landbauforschung 2009, 59, 1–10. [Google Scholar]
- Krause, S.; Hartmann, F.; Mund, J.-P. UAV Workflow Optimization for the Acquisition of High-Quality Photogrammetric Point Clouds in Forestry. GI-Forum 2016, 1, 72–84. [Google Scholar] [CrossRef]
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- McGaughey, R.J. FUSION/LDV: Software for LIDAR Data Analysis and Visualization.; US Department of Agriculture, Forest Service: Pacific Northwest Research Station: Seattle, WA, USA,, 2018.
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2016. [Google Scholar]
- Silva, C.A.; Hudak, A.; Vierling, L.A. rLiDAR: An R Package for Reading, Processing and Visualizing LiDAR (Light Detection and Ranging) Data. Available online: https://rdrr.io/cran/rLiDAR/ (accessed on 28 March 2019).
- Roussel, J.-R.; Auty, D. LidR: Airborne LiDAR Data Manipulation and Visualization for Forestry Applications. Available online: https://rdrr.io/cran/lidR/ (accessed on 28 March 2019).
- Mohan, M.; Silva, C.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Matasci, G.; Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W.; Zald, H.S.J. Large-area mapping of Canadian boreal forest cover, height, biomass and other structural attributes using Landsat composites and lidar plots. Remote Sens. Environ. 2018, 209, 90–106. [Google Scholar] [CrossRef]
- White, J.; Stepper, C.; Tompalski, P.; Coops, N.; Wulder, M. Comparing ALS and Image-Based Point Cloud Metrics and Modelled Forest Inventory Attributes in a Complex Coastal Forest Environment. Forests 2015, 3704–3732. [Google Scholar] [CrossRef]
- Straub, C.; Stepper, C.; Seitz, R.; Waser, L.T. Potential of UltraCamX stereo images for estimating timber volume and basal area at the plot level in mixed European forests. Can. J. For. Res. 2013, 43, 731–741. [Google Scholar] [CrossRef]
- Vastaranta, M.; Niemi, M.; Karjalainen, M.; Peuhkurinen, J.; Kankare, V.; Hyyppä, J.; Holopainen, M. Prediction of Forest Stand Attributes Using TerraSAR-X Stereo Imagery. Remote Sens. 2014, 6, 3227–3246. [Google Scholar] [CrossRef]
- Arias-Rodil, M.; Diéguez-Aranda, U.; Burkhart, H.E. Effects of Measurement Error in Total Tree Height and Upper-Stem Diameter on Stem Volume Prediction. For. Sci. 2017, 63, 250–260. [Google Scholar]
- Riedel, T. Aufnahmeanweisung für die Kohlenstoffinventur 2017 (CI 2017): 1. Auflage, Juli 2016 (Version 1.2); Bundesministerium für Ernährung und Landwirtschaft (BMEL): Bonn, Germany, 2017; Volume 99. [Google Scholar]
- Luoma, V.; Saarinen, N.; Wulder, M.; White, J.; Vastaranta, M.; Holopainen, M.; Hyyppä, J. Assessing Precision in Conventional Field Measurements of Individual Tree Attributes. Forests 2017, 8, 38. [Google Scholar] [CrossRef]
- Zimmermann, F.; Eling, C.; Klingbeil, L.; Kuhlmann, H. Precise Positioning of UAVs—Dealing with Challenging RTK-GPS Measurement Conditions During Automated UAV Flights. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, IV-2/W3, 95–102. [Google Scholar] [CrossRef]
- Gerke, M.; Przybilla, H.-J. Accuracy Analysis of Photogrammetric UAV Image Blocks: Influence of Onboard RTK-GNSS and Cross Flight Patterns. Photogramm. Fernerkund. Geoinf. 2016, 2016, 17–30. [Google Scholar] [CrossRef]
- Liang, Z.; Hanfeng, L.; Dingjie, W.; Yanqing, H.; Jie, W. Asynchronous RTK precise DGNSS positioning method for deriving a low-latency high-rate output. J. Geod. 2015, 89, 641–653. [Google Scholar] [CrossRef]
- Hakala, T.; Markelin, L.; Honkavaara, E.; Scott, B.; Theocharous, T.; Nevalainen, O.; Näsi, R.; Suomalainen, J.; Viljanen, N.; Greenwell, C.; et al. Direct Reflectance Measurements from Drones: Sensor Absolute Radiometric Calibration and System Tests for Forest Reflectance Characterization. Sensors 2018, 18, 1417. [Google Scholar] [CrossRef] [PubMed]
- Kraft, T.; Geßner, M.; Meißner, H.; Cramer, M.; Gerke, M.; Przybilla, H.J. Evaluation of a Metric Camera System Tailored for High Precision UAV Applications. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 901–907. [Google Scholar] [CrossRef]
- Dash, J.; Pearse, G.; Watt, M. UAV Multispectral Imagery Can Complement Satellite Data for Monitoring Forest Health. Remote Sens. 2018, 10, 1216. [Google Scholar] [CrossRef]
- Puliti, S.; Saarela, S.; Gobakken, T.; Ståhl, G.; Næsset, E. Combining UAV and Sentinel-2 auxiliary data for forest growing stock volume estimation through hierarchical model-based inference. Remote Sens. Environ. 2018, 204, 485–497. [Google Scholar] [CrossRef]
- Abdollahnejad, A.; Panagiotidis, D.; Surový, P. Estimation and Extrapolation of Tree Parameters Using Spectral Correlation between UAV and Pléiades Data. Forests 2018, 9, 85. [Google Scholar] [CrossRef]
- Baltsavias, E.P. A comparison between photogrammetry and laser scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Drew, D.M.; Downes, G.M. The use of precision dendrometers in research on daily stem size and wood property variation: A review. Dendrochronologia 2009, 27, 159–172. [Google Scholar] [CrossRef]
- Meinzer, F.C.; Bond, B.J.; Warren, J.M.; Woodruff, D.R. Does water transport scale universally with tree size? Funct. Ecol. 2005, 19, 558–565. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission | Calibrated Images | RMSE | GSD (cm/pixel) | Points | Point Density (m3) |
|---|---|---|---|---|---|
| February 13, 2018 (PPCpre) | 143 | 0.009 | 0.90 | 27,576,865 | 2,731.39 |
| April 29, 2018 (PPCpost) | 161 | 0.01 | 1.02 | 27,171,260 | 1,727.18 |
| Description | n | Acquisition Date | |
|---|---|---|---|
| Fieldall | Field-based indirect measurements | 285 | February, 2018 |
| PPCpre | UAVP mission before harvesting | 285 | February, 2018 |
| Direct | Direct measurements of harvested trees | 34 | March, 2018 |
| PPCpost | UAVP mission after harvesting | 251 | April, 2018 |
| Min (m) | 1st Quartial (m) | Median (m) | Mean (m) | 3rd Quartial (m) | Max (m) | N | Original Dataset | |
|---|---|---|---|---|---|---|---|---|
| Direct | 12.12 | 15.74 | 16.60 | 16.58 | 17.53 | 19.60 | 34 | - |
| Fieldharv | 12.50 | 15.85 | 16.85 | 16.72 | 17.95 | 19.50 | 34 | Fieldall |
| PPCpre_harv | 13.00 | 15.54 | 16.37 | 16.44 | 17.43 | 19.20 | 34 | PPCpre |
| Fieldall | 11.10 | 16.40 | 17.60 | 17.58 | 18.80 | 21.90 | 285 | - |
| PPCpre | 10.37 | 16.07 | 17.25 | 17.22 | 18.43 | 21.12 | 285 | - |
| Fieldall_rem | 11.10 | 16.45 | 17.80 | 17.70 | 19.00 | 21.90 | 251 | Fieldall |
| PPCpre_rem | 10.37 | 16.15 | 17.34 | 17.32 | 18.54 | 21.12 | 251 | PPCpre |
| PPCpost | 10.45 | 16.10 | 17.36 | 17.33 | 18.62 | 21.09 | 251 | - |
| Dataset Comparison | Total Error | Systematic Error (Bias) | Random Error | Correlation | Total | ||||
|---|---|---|---|---|---|---|---|---|---|
| RMSE (m) | RMSE (%) | ME (m) | ME (%) | SDE (m) | SDE (%) | R2 | p-Value | n | |
| Fieldharv_Direct | 0.304 | 1.82 | 0.144 | 0.86 | 0.271 | 1.62 | 0.975 | 2.2 × 10−16 | 34 |
| PPCpre_harv_Direct | 0.34 | 2.07 | −0.134 | −0.81 | 0.317 | 1.93 | 0.971 | 2.2 × 10−16 | 34 |
| PPCpre_Fieldall | 0.479 | 2.78 | −0.365 | −2.12 | 0.311 | 1.81 | 0.967 | 2.2 × 10−16 | 285 |
| PPCpre_rem_Fieldall_rem | 0.486 | 2.81 | −0.377 | −2.18 | 0.308 | 1.78 | 0.967 | 2.2 × 10−16 | 251 |
| PPCpost_Fieldall_rem | 0.477 | 2.75 | −0.369 | −2.13 | 0.302 | 1.74 | 0.968 | 2.2 × 10−16 | 251 |
| PPCpre_rem_PPCpost | 0.138 | 0.794 | 0.008 | 0.04 | 0.138 | 0.79 | 0.993 | 2.2 × 10−16 | 251 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krause, S.; Sanders, T.G.M.; Mund, J.-P.; Greve, K. UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring. Remote Sens. 2019, 11, 758. https://doi.org/10.3390/rs11070758
Krause S, Sanders TGM, Mund J-P, Greve K. UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring. Remote Sensing. 2019; 11(7):758. https://doi.org/10.3390/rs11070758
Chicago/Turabian StyleKrause, Stuart, Tanja G.M. Sanders, Jan-Peter Mund, and Klaus Greve. 2019. "UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring" Remote Sensing 11, no. 7: 758. https://doi.org/10.3390/rs11070758
APA StyleKrause, S., Sanders, T. G. M., Mund, J. -P., & Greve, K. (2019). UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring. Remote Sensing, 11(7), 758. https://doi.org/10.3390/rs11070758