Assessing OpenStreetMap Completeness for Management of Natural Disaster by Means of Remote Sensing: A Case Study of Three Small Island States (Haiti, Dominica and St. Lucia)



Abstract
:
1. Introduction
1.1. OpenStreetMap (OSM) for Disaster Management
1.2. Assessing OSM Completeness and Accuracy
2. Materials and Methods
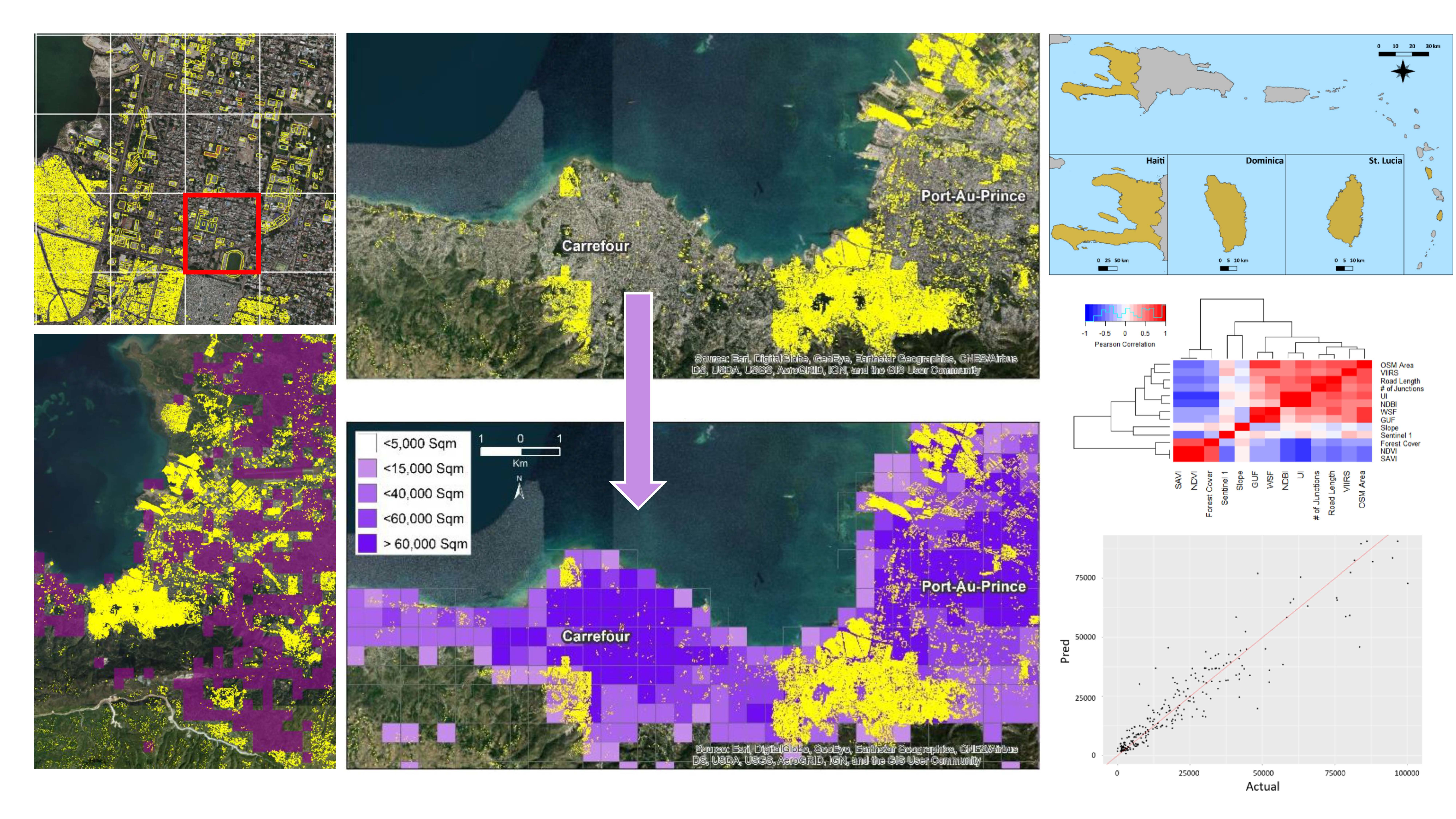
2.1. Study Areas
2.1.1. Haiti
2.1.2. St. Lucia
2.1.3. Dominica
2.2. Analytical Framework
2.2.1. Step 1: Construct an Artificial Tessellation
2.2.2. Step 2: Download the Current OSM Building Footprints
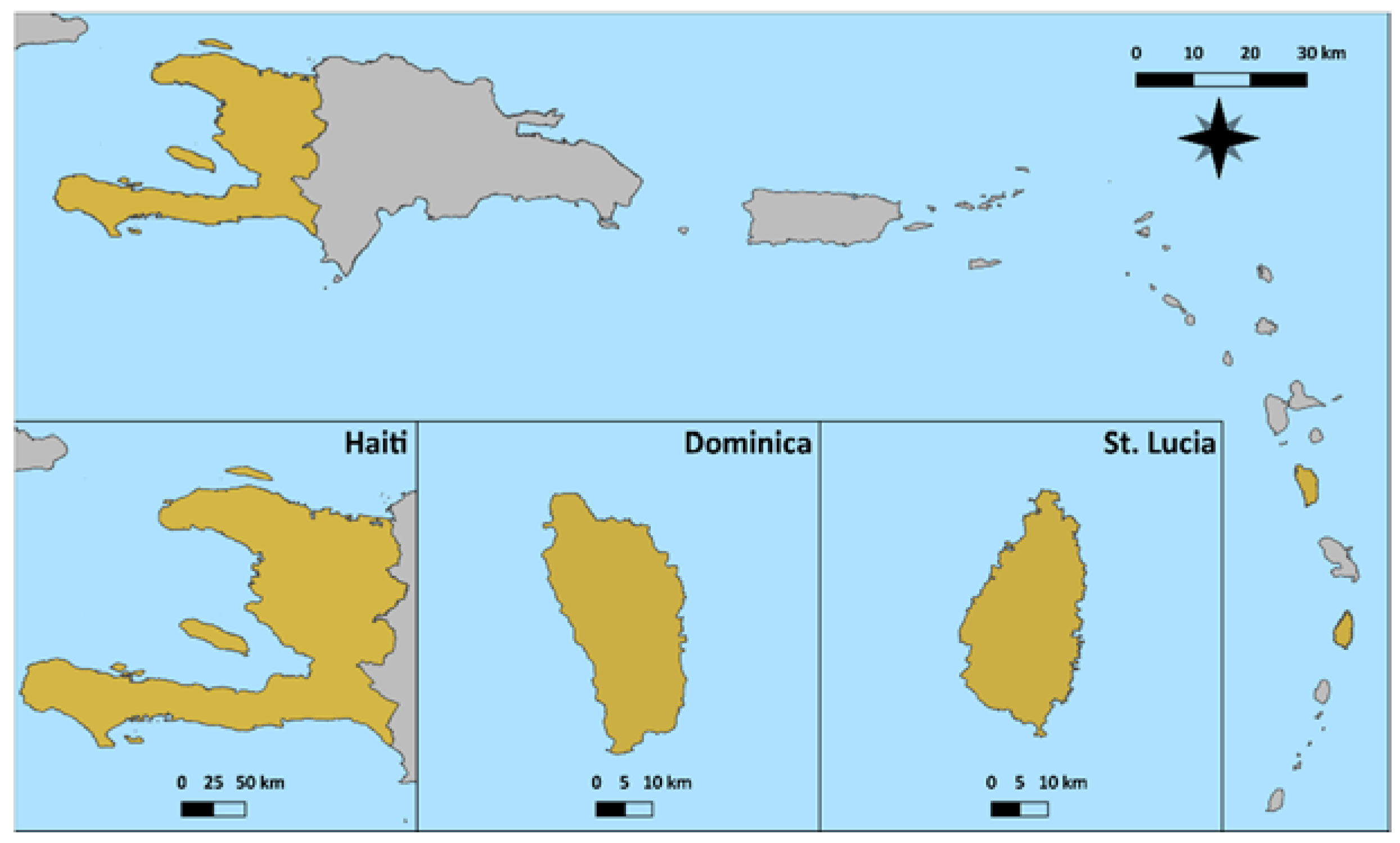
2.2.3. Step 3: Calculate Total Area of OSM Building Footprints in a Grid Cell
2.2.4. Step 4: Preprocess and Aggregate the Remotely Sensed and Geospatial Data
2.2.5. Step 5: Identify Mapped Grid Cells
2.2.6. Step 6: Perform Correlation Analysis and Prediction
2.2.7. Step 7: Predict the Coverage of OSM-Building Footprints in Each Entire Country
3. Results
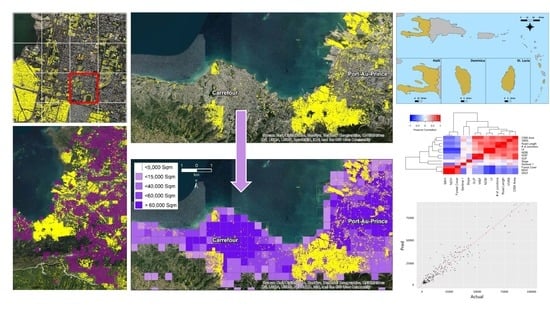
3.1. Prediction of OSM Building Footprint Coverage
3.2. Evaluation of the Method in the Case of Dominica and St. Lucia
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- WHO. Available online: https://www.who.int/environmental_health_emergencies/natural_events/en/ (accessed on 1 November 2019).
- FAO. Available online: http://www.fao.org/resilience/areas-of-work/natural-hazards/en/ (accessed on 1 November 2019).
- Munang, R.; Thiaw, I.; Alverson, K.; Liu, J.; Han, Z. The role of ecosystem services in climate change adaptation and disaster risk reduction. Curr. Opin. Environ. Sustain. 2013, 5, 47–52. [Google Scholar] [CrossRef]
- Brown, P.; Daigneault, A.J.; Tjernström, E.; Zou, W. Natural disasters, social protection, and risk perceptions. World Dev. 2018, 104, 310–325. [Google Scholar] [CrossRef] [PubMed]
- Shen, S.; Cheng, C.; Song, C.; Yang, J.; Yang, S.; Su, K.; Yuan, L.; Chen, X. Spatial distribution patterns of global natural disasters based on biclustering. Nat. Hazards 2018, 92, 1809–1820. [Google Scholar] [CrossRef]
- Fairbairn, T.I. Economic Consequences of Natural Disasters Among Pacific Island Countries. Pac. Econ. Bull. 1998, 13, 2. [Google Scholar]
- Van Beynen, P.; Akiwumi, F.A.; Van Beynen, K. A sustainability index for small island developing states. Int. J. Sustain. Dev. World Ecol. 2018, 25, 99–116. [Google Scholar] [CrossRef]
- Goodchild, M.F. Citizens as voluntary sensors: Spatial data infrastructure in the world of Web 2.0. Int. J. Spat. Data Infrastruct. Res. 2007, 2, 24–32. [Google Scholar]
- Kawasaki, A.; Berman, M.L.; Guan, W. The growing role of web-based geospatial technology in disaster response and support. Disasters 2013, 37, 201–221. [Google Scholar] [CrossRef]
- Poorazizi, M.; Hunter, A.; Steiniger, S. A volunteered geographic information framework to enable bottom-up disaster management platforms. ISPRS Int. J. Geo-Inf. 2015, 4, 1389–1422. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Zhang, W.C.; Deng, C.; Nie, N.; Yi, L. Volunteered Geographic Information for Disaster Management with Application to Earthquake Disaster Databank & Sharing Platform. IOP Conf. Ser. Earth Environ. Sci. 2017, 57, 012015. [Google Scholar]
- Mirbabaie, M.; Stieglitz, S.; Volkeri, S. Volunteered geographic information and its implications for disaster management. In Proceedings of the 2016 49th Hawaii International Conference on System Sciences (HICSS), Kauai, HI, USA, 5–8 January 2016. [Google Scholar]
- Mahabir, R.; Stefanidis, A.; Croitoru, A.; Crooks, A.T.; Agouris, P. Authoritative and Volunteered Geographical Information in a Developing Country: A Comparative Case Study of Road Datasets in Nairobi, Kenya. ISPRS Int. J. Geo-Inf. 2017, 6, 24. [Google Scholar] [CrossRef]
- Haklay, M.; Weber, P. Openstreetmap: User-generated street maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef] [Green Version]
- Neis, P.; Zielstra, D. Recent developments and future trends in volunteered geographic information research: The case of OpenStreetMap. Future Internet 2014, 6, 76–106. [Google Scholar] [CrossRef] [Green Version]
- Schelhorn, S.-J.; Herfort, B.; Leiner, R.; Zipf, A.; De Albuquerque, J.P. Identifying elements at risk from OpenStreetMap: The case of flooding. In Proceedings of the 11th International ISCRAM Conference, University Park, PA, USA, 18–21 May 2014. [Google Scholar]
- Poiani, T.H.; dos Santos Rocha, R.; Degrossi, L.C.; de Albuquerque, J.P. Potential of collaborative mapping for disaster relief: A case study of OpenStreetMap in the Nepal earthquake 2015. In Proceedings of the 2016 49th Hawaii International Conference on System Sciences (HICSS), Kauai, HI, USA, 5–8 January 2016. [Google Scholar]
- Latif, S.; Islam, K.R.; Khan, M.M.I.; Ahmed, S.I. OpenStreetMap for the disaster management in Bangladesh. In Proceedings of the 2011 IEEE Conference on Open Systems, Langkawi, Malaysia, 25–28 September 2011. [Google Scholar]
- Palen, L.; Soden, R.; Anderson, T.J.; Barrenechea, M. Success scale in a data-producing organization: The socio-technical evolution of OpenStreetMap in response to humanitarian events. In Proceedings of the Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Korea, 18–23 April 2015. [Google Scholar]
- Eckle, M.; Herfort, B.; Yan, Y.; Kuo, C.-L.; Zipf, A. Towards using Volunteered Geographic Information to monitor post-disaster recovery in tourist destinations. In Proceedings of the ISCRAM, 21–24 May 2017; Available online: https://www.imt.fr/en/events/event/iscram-2017-international-conference-on-information-systems-for-crisis-response-and-management-albi-a-mines-albi-2/ (accessed on 25 December 2019).
- Taylor, L.N. Digital Humanities Tools for Disaster Response: Hosting Mapathons and Telling Our Stories. Available online: https://uwispace.sta.uwi.edu/dspace/handle/2139/45647 (accessed on 25 December 2019).
- Parr, D.A. The production of volunteered geographic information: A study of OpenStreetMap in the United States. Available online: https://digital.library.txstate.edu/bitstream/handle/10877/5776/PARR-DISSERTATION-2015.pdf?sequence=1&isAllowed=y (accessed on 25 December 2019).
- Anderson, J.; Sarkar, D.; Palen, L. Corporate Editors in the Evolving Landscape of OpenStreetMap. ISPRS Int. J. Geo-Inf. 2019, 8, 232. [Google Scholar] [CrossRef] [Green Version]
- Herfort, B.; Li, H.; Fendrich, S.; Lautenbach, S.; Zipf, A. Mapping Human Settlements with Higher Accuracy and Less Volunteer Efforts by Combining Crowdsourcing and Deep Learning. Remote Sens. 2019, 11, 1799. [Google Scholar] [CrossRef] [Green Version]
- Scholz, S.; Knight, P.; Eckle, M.; Marx, S.; Zipf, A. Volunteered Geographic Information for Disaster Risk Reduction-The Missing Maps Approach and Its Potential within the Red Cross and Red Crescent Movement. Remote Sens. 2018, 10, 1239. [Google Scholar] [CrossRef] [Green Version]
- Barrington-Leigh, C.; Millard-Ball, A. The world’s user-generated road map is more than 80% complete. PLoS ONE 2017, 12, e0180698. [Google Scholar] [CrossRef] [Green Version]
- Jacobs, C.; Zipf, A. Completeness of citizen science biodiversity data from a volunteered geographic information perspective. Geo-Spat. Inf. Sci. 2017, 20, 3–13. [Google Scholar] [CrossRef] [Green Version]
- Hecht, R.; Kunze, C.; Hahmann, S. Measuring Completeness of Building Footprints in OpenStreetMap over Space and Time. ISPRS Int. J. Geo-Inf. 2013, 2, 1066–1091. [Google Scholar] [CrossRef]
- Mashhadi, A.; Quattrone, G.; Capra, L. The Impact of Society on Volunteered Geographic Information: The Case of OpenStreetMap. In OpenStreetMap in GIScience: Experiences, Research, and Applications; Jokar Arsanjani, J., Zipf, A., Mooney, P., Helbich, M., Eds.; Lecture Notes in Geoinformation and Cartography; Springer International Publishing: Cham, Germany, 2015; pp. 125–141. [Google Scholar]
- Quattrone, G.; Mashhadi, A.; Capra, L. Mind the Map: The Impact of Culture and Economic Affluence on Crowd-mapping Behaviours. In Proceedings of the 17th ACM Conference on Computer Supported Cooperative Work & Social Computing, New York, NY, USA, 15–19 February 2014. [Google Scholar]
- Zielstra, D.; Zipf, A. A comparative study of proprietary geodata and volunteered geographic information for Germany. In Proceedings of the 13th AGILE International Conference on Geographic Information Science, Guimarães, Portugal, 11 May 2010. [Google Scholar]
- Haklay, M. How Good is Volunteered Geographical Information? A Comparative Study of OpenStreetMap and Ordnance Survey Datasets. Environ. Plan. B 2010, 37, 682–703. [Google Scholar] [CrossRef] [Green Version]
- Zielstra, D.; Hochmair, H.H.; Neis, P. Assessing the Effect of Data Imports on the Completeness of OpenStreetMap-A United States Case Study. Trans. GIS 2013, 17, 315–334. [Google Scholar] [CrossRef] [Green Version]
- Mocnik, F.-B.; Mobasheri, A.; Zipf, A. Open source data mining infrastructure for exploring and analysing OpenStreetMap. Open Geospat. Data Softw. Stand. 2018, 3, 7. [Google Scholar] [CrossRef]
- Antoniou, V.; Skopeliti, A. Measures and Indicators of Vgi Quality: AN Overview. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 3, 345–351. [Google Scholar]
- Acheson, E.; De Sabbata, S.; Purves, R.S. A quantitative analysis of global gazetteers: Patterns of coverage for common feature types. Comput. Environ. Urban Syst. 2017, 64, 309–320. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Li, X.; Wang, A.; Bao, T.; Tian, S. Density and diversity of OpenStreetMap road networks in China. J. Urban Manag. 2015, 4, 135–146. [Google Scholar] [CrossRef] [Green Version]
- Törnros, T.; Dorn, H.; Hahmann, S.; Zipf, A. Uncertainties of Completeness Measures In Openstreetmap; A Case Study For Buildings In A Medium-sized German City. In Proceedings of the ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume II-3/W5, ISPRS Geospatial Week, La Grande Motte, France, 28 September–3 October 2015. [Google Scholar]
- Brovelli, M.; Zamboni, G. A new method for the assessment of spatial accuracy and completeness of OpenStreetMap building footprints. ISPRS Int. J. Geo-Inf. 2018, 7, 289. [Google Scholar] [CrossRef] [Green Version]
- Husen, S.N.R.M.; Idris, N.H.; Ishak, M.H.I. The Quality of Openstreetmap in Malaysia: A Preliminary Assessment. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4249, 291–298. [Google Scholar] [CrossRef] [Green Version]
- Brovelli, M.A.; Minghini, M.; Molinari, M.; Mooney, P. Towards an Automated Comparison of OpenStreetMap with Authoritative Road Datasets. Trans. GIS 2017, 21, 191–206. [Google Scholar] [CrossRef] [Green Version]
- Senaratne, H.; Mobasheri, A.; Ali, A.L.; Capineri, C.; Haklay, M. A review of volunteered geographic information quality assessment methods. Int. J. Geogr. Inf. Sci. 2017, 31, 139–167. [Google Scholar] [CrossRef]
- Neis, P.; Zielstra, D.; Zipf, A. The street network evolution of crowdsourced maps: OpenStreetMap in Germany 2007–2011. Future Internet 2012, 4, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Dorn, H.; Törnros, T.; Zipf, A. Quality Evaluation of VGI Using Authoritative Data—A Comparison with Land Use Data in Southern Germany. ISPRS Int. J. Geo-Inf. 2015, 4, 1657–1671. [Google Scholar] [CrossRef]
- Zheng, S.; Zheng, J. Assessing the Completeness and Positional Accuracy of OpenStreetMap in China. In Thematic Cartography for the Society; Springer: Berlin/Heidelberg, Germany, 2014; pp. 171–189. [Google Scholar]
- Kunze, C.; Hecht, R.; Hahmann, S. Assessing the Completeness of Building Footprints in OpenStreetMap: An Example from Germany. Available online: https://icaci.org/files/documents/ICC_proceedings/ICC2013/_extendedAbstract/358_proceeding.pdf (accessed on 25 December 2019).
- Antunes, F.; Fonte, C.C.; Brovelli, M.A.; Minghini, M.; Molinari, M.E.; Mooney, P. Assessing OSM Road Positional Quality with Authoritative Data; PRT: Woodbridge, VA, USA, 2015; pp. 1–8. [Google Scholar]
- Lambin, E.F.; Geist, H.J. Land-Use and Land-Cover Change: Local Processes and Global Impacts; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Fonte, C.C.; Patriarca, J.A.; Minghini, M.; Antoniou, V.; See, L.; Brovelli, M.A. Using openstreetmap to create land use and land cover maps: Development of an application. In Geospatial Intelligence: Concepts, Methodologies, Tools, and Applications; IGI Global: Hershey, PA, USA, 2019; pp. 1100–1123. [Google Scholar]
- Fonte, C.C.; Minghini, M.; Antoniou, V.; See, L.; Patriarca, J.; Brovelli, M.A.; Milcinski, G. An Automated Methodology for Converting OSM Data into a Land Use/Cover Map. In Proceedings of the 6th International Conference on Cartography & GIS, Albena, Bulgaria, 13–17 June 2016. [Google Scholar]
- Luo, N.; Wan, T.; Hao, H.; Lu, Q. Fusing High-Spatial-Resolution Remotely Sensed Imagery and OpenStreetMap Data for Land Cover Classification Over Urban Areas. Remote Sens. 2019, 11, 88. [Google Scholar] [CrossRef] [Green Version]
- Audebert, N.; Saux, B.L.; Lefèvre, S. Joint Learning from Earth Observation and OpenStreetMap Data to Get Faster Better Semantic Maps. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- World Bank. The World Bank In Haiti. Available online: https://www.worldbank.org/en/country/haiti/overview. (accessed on 5 November 2019).
- World Bank. Understanding the Future of Haitian Cities. Available online: https://projects.worldbank.org/en/results/2018/06/26/understanding-the-future-of-haitian-cities (accessed on 5 November 2019).
- Bhawan, S.; Cohen, M. Climate Change Resilience: The Case of Haiti. Oxfam Research Reports. Available online: https://www.preventionweb.net/publications/view/37224 (accessed on 25 December 2019).
- Sam, J. Why is Haiti Vulnerable to Natural Hazards and Disasters? The Guardian. 4 October 2016. Available online: https://ehs.unu.edu/media/in-the-media/why-is-haiti-vulnerable-to-natural-hazards-and-disasters.html#info (accessed on 25 December 2019).
- UNFPA Haiti: Humanitarian Action Fact Sheet; Safety Dignity for Women, Adolescent Girls Young People. Available online: https://haiti.unfpa.org/sites/default/files/pub-pdf/2018%20UNFPA_Haiti_HumanitarianActionFactSheet_Dec.pdf (accessed on 25 December 2019).
- Central Intelligence Agency. Available online: https://www.cia.gov/library/publications/the-world-factbook/geos/st.html (accessed on 27 December 2019).
- World Bank GDP per Capita (current US$), St. Lucia. Available online: https://data.worldbank.org/indicator/NY.GDP.PCAP.CD?locations=LC (accessed on 25 December 2019).
- Saint Lucia. Available online: https://www.gfdrr.org/en/saint-lucia (accessed on 10 December 2019).
- Strauss, B.; Kulp, S. Sea-Level Rise Threats in the Caribbean: Data, tools, and Analysis for a More Resilient Future; Climate Central; Inter-American Development Bank: Washington, DC, USA; Climate Central: Princeton, NJ, USA, 2018. [Google Scholar]
- Commonwealth of Dominica 2011 Population and Housing Census: Preliminary Results. Central Statistical Office, Ministry of Finance, Kennedy Avenue. Available online: http://www.dominica.gov.dm/cms/files/2011_census_report.pdf (accessed on 25 December 2019).
- Barclay, J.; Wilkinson, E.; White, C.S.; Shelton, C.; Forster, J.; Few, R.; Lorenzoni, I.; Woolhouse, G.; Jowitt, C.; Stone, H.; et al. Historical Trajectories of Disaster Risk in Dominica. Int. J. Disaster Risk Sci. 2019, 10, 149–165. [Google Scholar] [CrossRef] [Green Version]
- Benson, C.; Clay, E.; Michael, F.V.; Robertson, A.W. Dominica: Natural Disasters and Economic Development in a Small Island State. Available online: https://www.odi.org/publications/3656-dominica-natural-disasters-and-economic-development-small-island-state (accessed on 25 December 2019).
- World Bank Provides US$65 million for Dominica’s Post-Maria Reconstruction. Available online: https://www.worldbank.org/en/news/press-release/2018/04/13/world-bank-provides-us65-million-for-dominicas-post-maria-reconstruction (accessed on 27 December 2019).
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Patel, N.N.; Angiuli, E.; Gamba, P.; Gaughan, A.; Lisini, G.; Stevens, F.R.; Tatem, A.J.; Trianni, G. Multitemporal settlement and population mapping from Landsat using Google Earth Engine. Int. J. Appl. Earth Obs. Geoinf. 2015, 35, 199–208. [Google Scholar] [CrossRef] [Green Version]
- Trianni, G.; Lisini, G.; Angiuli, E.; Moreno, E.; Dondi, P.; Gaggia, A.; Gamba, P. Scaling up to national/regional urban extent mapping using Landsat data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3710–3719. [Google Scholar] [CrossRef]
- Goldblatt, R.; You, W.; Hanson, G.; Khandelwal, A. Detecting the boundaries of urban areas in india: A dataset for pixel-based image classification in google earth engine. Remote Sens. 2016, 8, 634. [Google Scholar] [CrossRef] [Green Version]
- Goldblatt, R.; Deininger, K.; Hanson, G. Utilizing publicly available satellite data for urban research: Mapping built-up land cover and land use in Ho Chi Minh City, Vietnam. Dev. Eng. 2018, 3, 83–99. [Google Scholar] [CrossRef]
- NASA. NASA Visible Infrared Imaging Adiometer SUITE Level-1B Product User Guide [Collection-1]; Level-1 and Atmosphere Archive & Distribution System; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2018. Available online: https://ladsweb.modaps.eosdis.nasa.gov/missions-and-measurements/viirs/NASAVIIRSL1BUGAug2019.pdf (accessed on 25 December 2019).
- Pettorelli, N.; Vik, J.O.; Mysterud, A.; Gaillard, J.-M.; Tucker, C.J.; Stenseth, N.C. Using the satellite-derived NDVI to assess ecological responses to environmental change. Trends Ecol. Evol. 2005, 20, 503–510. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Zha, Y.; Gao, J.; Ni, S. Use of normalized difference built-up index in automatically mapping urban areas from TM imagery. Int. J. Remote Sens. 2003, 24, 583–594. [Google Scholar] [CrossRef]
- Kawamura, M. Relation Between Social and Environmental Conditions in Colombo Sri Lanka and the Urban Index Estimated by Satellite Remote Sensing Data; ISPRS Archives: Vienna, Austria, 1996; pp. 190–191. [Google Scholar]
- Theobald, D.M.; Harrison-Atlas, D.; Monahan, W.B.; Albano, C.M. Ecologically-relevant maps of landforms and physiographic diversity for climate adaptation planning. PLoS ONE 2015, 10, e0143619. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.; Tyukavina, A.; Thau, D.; Stehman, S.; Goetz, S.; Loveland, T.R. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Esch, T.; Heldens, W.; Hirner, A.; Keil, M.; Marconcini, M.; Roth, A.; Zeidler, J.; Dech, S.; Strano, E. Breaking new ground in mapping human settlements from space-The Global Urban Footprint. ISPRS J. Photogramm. Remote Sens. 2017, 134, 30–42. [Google Scholar]
- Esch, T.; Bachofer, F.; Heldens, W.; Hirner, A.; Marconcini, M.; Palacios-Lopez, D.; Roth, A.; Üreyen, S.; Zeidler, J.; Dech, S.; et al. Where We Live-A Summary of the Achievements and Planned Evolution of the Global Urban Footprint. Remote Sens. 2018, 10, 895. [Google Scholar] [CrossRef] [Green Version]
- Esch, T.; Schenk, A.; Ullmann, T.; Thiel, M.; Roth, A.; Dech, S. Characterization of Land Cover Types in TerraSAR-X Images by Combined Analysis of Speckle Statistics and Intensity Information. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1911–1925. [Google Scholar] [CrossRef]
- ESRI “World Imagery”. Sources: Esri, DigitalGlobe, GeoEye, i-cubed, USDA FSA, USGS, AEX, Getmapping, Aerogrid, IGN, IGP, swisstopo, and the GIS User Community. 2019. Available online: https://www.arcgis.com/home/item.html?id=3c0af9384f8f4f9595d65c1a60b878b8 (accessed on 25 December 2019).
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Saint Lucia Open Data 2010 Census Population. 2010. Available online: https://data.govt.lc/dataset/census-population/resource/0f198c56-a69e-4b38-9390-ce7059f1f967 (accessed on 25 December 2019).
- Ritchie, H.; Roser, M. Natural Disasters; Our World in Data. 2014. Available online: https://ourworldindata.org/grapher/natural-disaster-death-rates?time=1900..2018 (accessed on 25 December 2019).
- Pelling, M.; Maskrey, A.; Ruiz, P.; Hall, P.; Peduzzi, P.; Dao, Q.-H.; Mouton, F.; Herold, C.; Kluser, S. Reducing Disaster Risk: A Challenge for Development; United Nations: New York, NY, USA, 2004. [Google Scholar]
- Giardino, M.; Perotti, L.; Lanfranco, M.; Perrone, G. GIS and geomatics for disaster management and emergency relief: A proactive response to natural hazards. Appl. Geomat. 2012, 4, 33–46. [Google Scholar] [CrossRef]
- Anwar, S. Map Completeness and OSM Analytics. Medium 2018. Available online: https://medium.com/devseed/map-completeness-and-osm-analytics-83d6e0f3d969 (accessed on 27 December 2019).
- Minghini, M.; Delucchi, L.; Sarretta, A.; Lupia, F.; Napolitano, M.; Palmas, A. Collaborative Mapping Response to Disasters Through OpenStreetMap: The case of the 2016 Italian Earthquake. Zenodo 2017. The Article is Archived and Publicly Accessible on Zenodo. Available online: http://doi.org/10.5281/zenodo.1194529 (accessed on 25 December 2019).
- Liu, C.; Yang, K.; Bennett, M.M.; Guo, Z.; Cheng, L.; Li, M. Automated Extraction of Built-Up Areas by Fusing VIIRS Nighttime Lights and Landsat-8 Data. Remote Sens. 2019, 11, 1571. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zhou, Y. Urban mapping using DMSP/OLS stable night-time light: A review. Int. J. Remote Sens. 2017, 38, 6030–6046. [Google Scholar] [CrossRef]
- Levin, N.; Zhang, Q. A global analysis of factors controlling VIIRS nighttime light levels from densely populated areas. Remote Sens. Environ. 2017, 190, 366–382. [Google Scholar] [CrossRef] [Green Version]
- Ludwig, C.; Zipf, A. Exploring Regional Differences in the Representation of Urban Green Spaces in OpenStreetMap. In Proceedings of the “Geographical and Cultural Aspects of Geo-Information: Issues and Solutions” AGILE 2019 Workshop, Limassol, Cyprus, 17 June 2019. [Google Scholar]
- Gamba, P. Image and data fusion in remote sensing of urban areas: Status issues and research trends. Int. J. Image Data Fusion 2014, 5, 2–12. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, B.; Thau, D.; Moore, R. Building a better urban picture: Combining day and night remote sensing imagery. Remote Sens. 2015, 7, 11887–11913. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Li, C.; Tong, X.; Liu, S. A New Fusion Approach for Extracting Urban Built-up Areas from Multisource Remotely Sensed Data. Remote Sens. 2019, 11, 2516. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Y.; Lin, H. Urban Land Cover Mapping Using Random Forest Combined with Optical and SAR Data. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 6809–6812. [Google Scholar]
- Xia, N.; Cheng, L.; Li, M. Mapping Urban Areas Using a Combination of Remote Sensing and Geolocation Data. Remote Sens. 2019, 11, 1470. [Google Scholar] [CrossRef] [Green Version]
- Barron, C.; Neis, P.; Zipf, A. A comprehensive framework for intrinsic OpenStreetMap quality analysis. Trans. GIS 2014, 18, 877–895. [Google Scholar] [CrossRef]
- Grippa, T.; Georganos, S.; Zarougui, S.; Bognounou, P.; Diboulo, E.; Forget, Y.; Lennert, M.; Vanhuysse, S.; Mboga, N.; Wolff, E. Mapping urban land use at street block level using openstreetmap, remote sensing data, and spatial metrics. ISPRS Int. J. Geo-Inf. 2018, 7, 246. [Google Scholar] [CrossRef] [Green Version]
- Brinkhoff, T. Open Street Map Data As Source For Built-Up And Urban Areas On Global Scale. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 557–564. [Google Scholar] [CrossRef]
- Hu, T.; Yang, J.; Li, X.; Gong, P. Mapping urban land use by using landsat images and open social data. Remote Sens. 2016, 8, 151. [Google Scholar] [CrossRef]
- de Albuquerque, J.P.; Herfort, B.; Eckle, M. The Tasks of the Crowd: A Typology of Tasks in Geographic Information Crowdsourcing and a Case Study in Humanitarian Mapping. Remote Sens. 2016, 8, 859. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Predictor | Source | Number of Scenes | Per-Cell Statistics |
|---|---|---|---|
| Nighttime lights | VIIRS | 7 | Sum of Light (SOL): The sum of DNmax value of all pixels in cell, where is the maximum digital number (DN) value of pixel in location i over 7 monthly composites in 2019. |
| NDVI (NIR-RED)/(NIR+RED) | Sentinel-2 | ~42 | The sum NDVI value of all pixels in a grid cell |
| SAVI (NIR-RED)/(NIR+RED+L) * (1+L) | Sentinel-2 | ~42 | The sum SAVI value of all pixels in a grid cell |
| NDBI (MIR-NIR)/(MIR+NIR) | Sentinel-2 | ~42 | The sum NDBI value of all pixels in a grid cell |
| UI (SWIR2-NIR)/(SWIR2+ NIR) | Sentinel-2 | ~42 | The sum UI value of all pixels in a grid cell |
| deforestation | Hansen Global Forest Change v1.6 (2000-2018) | 1 | Total forest cover in a grid cell (2018) |
| Built-up area | GUF | 1 | Total built up area in a grid cell |
| Built-up area | WSF | 1 | Total built up area in a grid cell |
| Topography (slope) | SRTM | 1 | Average slope per grid cell |
| Surface texture | Sentinel-1 | ~70 | Average texture per grid cell |
| Roads | OSM | - | Total length of roads in a grid cell |
| Roads junctions | OSM | - | Number of junctions in a grid cell |
| VIIRS | GUF | WSF | NDVI | NDBI | SAVI | |
|---|---|---|---|---|---|---|
| r | 0.654 * | 0.76 * | 0.78 * | −0.551 * | 0.486 * | −0.551 * |
| UI | Forest Cover | SE1 | Slope | Road length | OSM junctions | |
| r | 0.614 * | −0.388 * | 0.16 | −0.11 | 0.69 * | 0.60 * |
| Step | Variable | R2 | Adjusted R2 | C(p) | AIC | RMSE |
|---|---|---|---|---|---|---|
| 1 | WSF | 0.614 | 0.613 | 984.9 | 18235.2 | 13332.1 |
| 2 | UI | 0.705 | 0.704 | 559.9 | 18013.3 | 11666.7 |
| 3 | GUF | 0.764 | 0.763 | 282.9 | 17828.1 | 10435.7 |
| 4 | VIIRS | 0.799 | 0.798 | 120.2 | 17696.0 | 9636.3 |
| 5 | Road length | 0.814 | 0.813 | 49.5 | 17631.2 | 9264.0 |
| 6 | FC area | 0.820 | 0.819 | 23.4 | 17605.8 | 9118.9 |
| 7 | NDBI | 0.822 | 0.821 | 17.0 | 17599.5 | 9078.8 |
| 8 | Number of junctions | 0.823 | 0.822 | 13.1 | 17595.6 | 9052.3 |
| 9 | Median slope | 0.824 | 0.822 | 11.9 | 17594.3 | 9040.2 |
| Step | (1) | (2) | (3) | (4) |
|---|---|---|---|---|
| GUF | 0.115 *** | 0.124 *** | 0.127 *** | 0.138 *** |
| (0.010) | (0.009) | (0.008) | (0.008) | |
| WSF | 0.141 *** | 0.081 *** | 0.050 *** | 0.034 *** |
| (0.010) | (0.009) | (0.009) | (0.009) | |
| VIIRS | 2214.671 *** | 1276.821 ** | 1073.838 *** | |
| (124.738) | (127.805) | (126.619) | ||
| NDBI | −37.152 *** | −17.790 | ||
| (11.258) | (11.409) | |||
| NDVI | 72,452.840 ** | 64,046.550 ** | ||
| (30,894.100) | (29,957.530) | |||
| SAVI | −48,312.220 ** | −42,708.300 ** | ||
| (20,600.640) | (19,976.140) | |||
| UI | 46.857 *** | 25.415 ** | ||
| (9.751) | (10.191) | |||
| Forest cover | 0.060 *** | 0.051 *** | ||
| (0.012) | (0.011) | |||
| Slope | 179.453 | 274.377 | ||
| (192.545) | (187.222) | |||
| Sentinel-1 | −696.229 | −295.342 | ||
| (453.517) | (442.270) | |||
| Road length | 1.470 *** | |||
| (0.543) | ||||
| No. of junctions | 60.057 ** | |||
| (29.311) | ||||
| Constant | 0.716 | −699.988 | 30,909.080 *** | 17,403.480 *** |
| (672.122) | (573.990) | (3897.596) | (4351.436) | |
| Observations | 835 | 835 | 835 | 835 |
| R2 | 0.663 | 0.756 | 0.813 | 0.825 |
| Adjusted R2 | 0.662 | 0.755 | 0.811 | 0.823 |
| Residual Std. Error | 12,460.39 | 10,615.940 | 9329.420 | 9029.806 |
| F Statistic | 818.245 *** | 856.591 *** | 357.937 *** | 323.203 *** |
| Dominica | St. Lucia | ||
|---|---|---|---|
| Full Dataset (N = 3861) | Full (N = 2781) | Visually Assessed Cells * (N = 179) | |
| (I) Pearson Correlation Test | |||
| GUF | r = 0.91 * | r = 0.75 * | r = 0.89 * |
| Num of Junc | r = 0.90 * | r = 0.76 * | r = 0.88 |
| WSF | r = 0.90 * | r = 0.70 * | r = 0.78 |
| Road Length | r = 0.81 * | r = 0.68 * | r = 0.84 * |
| VIIRS | r = 0.75 * | r = 0.58 * | r = 0.72 * |
| NDBI | r = 0.38 * | r = 0.30 | r = 0.3 |
| UI | r = 0.35 * | r = 0.26 | r = 0.35 |
| Sentinel 1 | r = 0.03 * | r = 0.00 | r = 0.20 |
| NDVI | r = −0.20 * | r = −0.19 | r = −0.29 |
| SAVI | r = −0.20 * | r = −0.19 | r = −0.29 |
| Slope | r = −0.16 | r = −0.14 * | r = 0.10 * |
| Forest Cover | r = −0.07 | r = −0.35 | r = −0.43 |
| (II) OLS | |||
| R2 = 92% F(12,3846) = 3848, p = 0.00 | R2 = 66% F(12,2783) = 464.6, p = 0.00 | R2 = 92% F(12,166) = 166.4, p = 0.00 | |
| (III) Random Forest | |||
| R2 = 88% | R2 = 94% | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goldblatt, R.; Jones, N.; Mannix, J. Assessing OpenStreetMap Completeness for Management of Natural Disaster by Means of Remote Sensing: A Case Study of Three Small Island States (Haiti, Dominica and St. Lucia). Remote Sens. 2020, 12, 118. https://doi.org/10.3390/rs12010118
Goldblatt R, Jones N, Mannix J. Assessing OpenStreetMap Completeness for Management of Natural Disaster by Means of Remote Sensing: A Case Study of Three Small Island States (Haiti, Dominica and St. Lucia). Remote Sensing. 2020; 12(1):118. https://doi.org/10.3390/rs12010118
Chicago/Turabian StyleGoldblatt, Ran, Nicholas Jones, and Jenny Mannix. 2020. "Assessing OpenStreetMap Completeness for Management of Natural Disaster by Means of Remote Sensing: A Case Study of Three Small Island States (Haiti, Dominica and St. Lucia)" Remote Sensing 12, no. 1: 118. https://doi.org/10.3390/rs12010118
APA StyleGoldblatt, R., Jones, N., & Mannix, J. (2020). Assessing OpenStreetMap Completeness for Management of Natural Disaster by Means of Remote Sensing: A Case Study of Three Small Island States (Haiti, Dominica and St. Lucia). Remote Sensing, 12(1), 118. https://doi.org/10.3390/rs12010118