Statistical Analysis of Changes in Sentinel-1 Time Series on the Google Earth Engine


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Theory
3. Materials and Methods
4. Results
4.1. Libyan Maritime Port Activity
4.2. Arms Control and Verification of Non-Proliferation
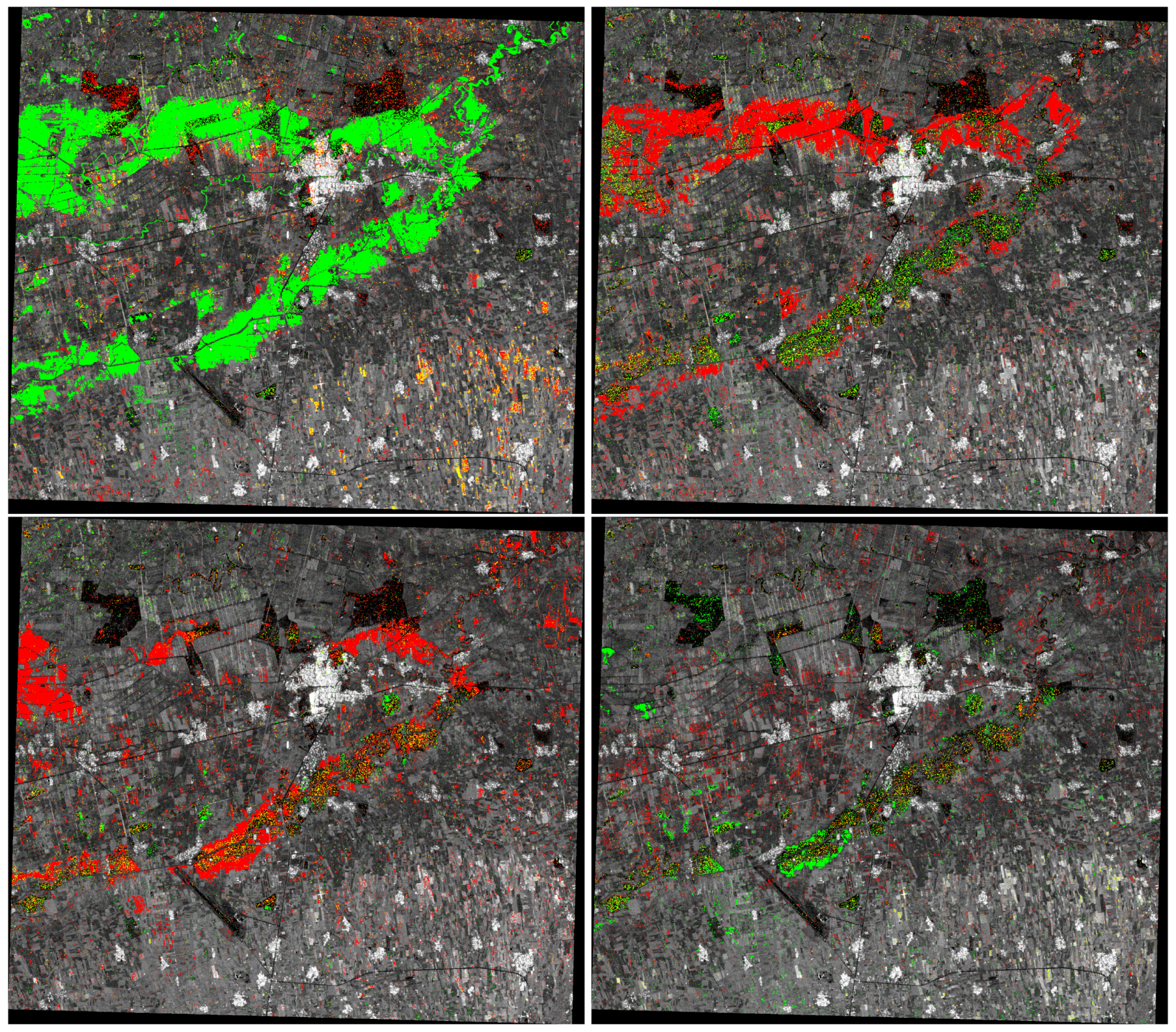
4.3. Flood Monitoring
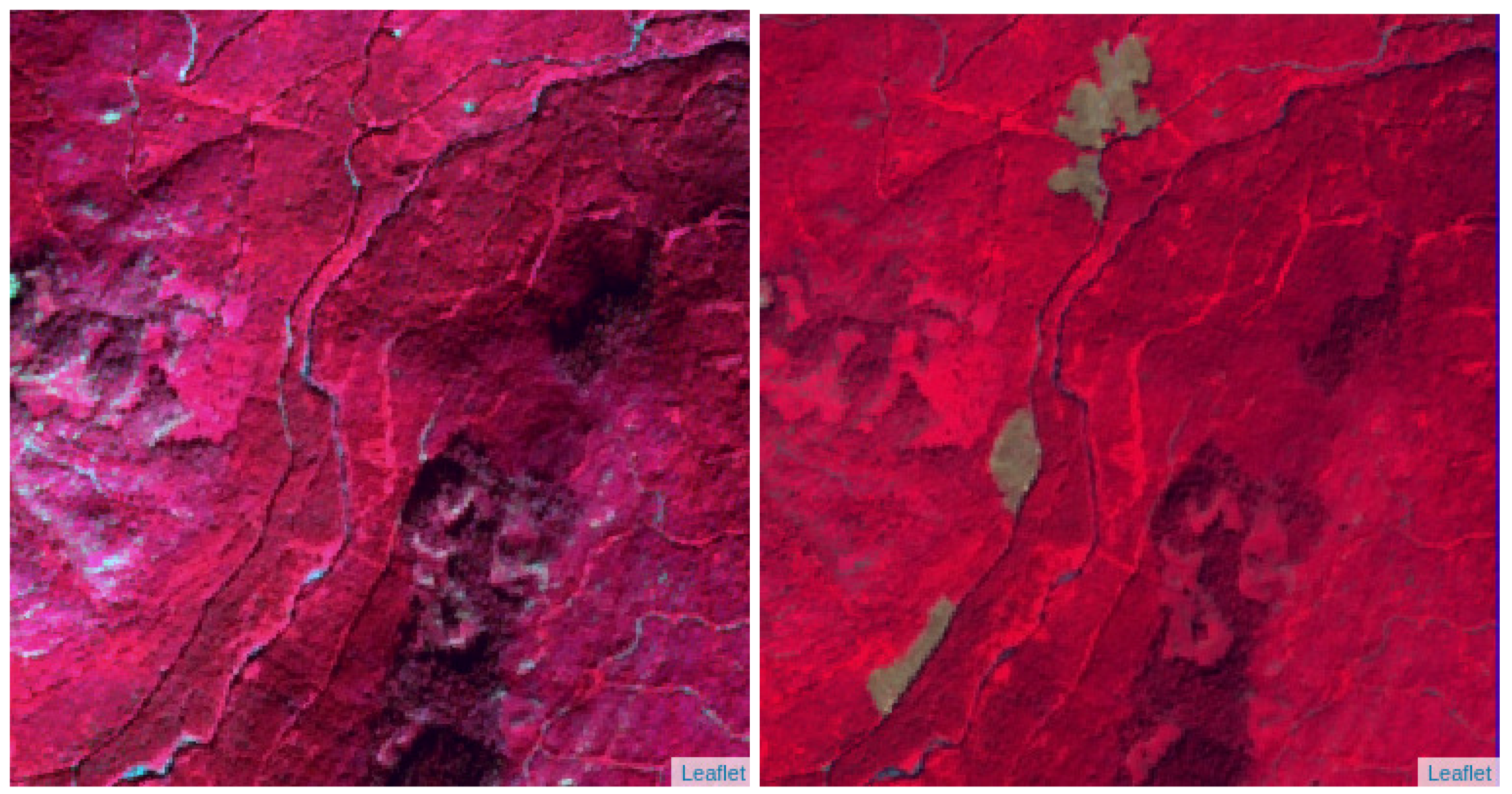
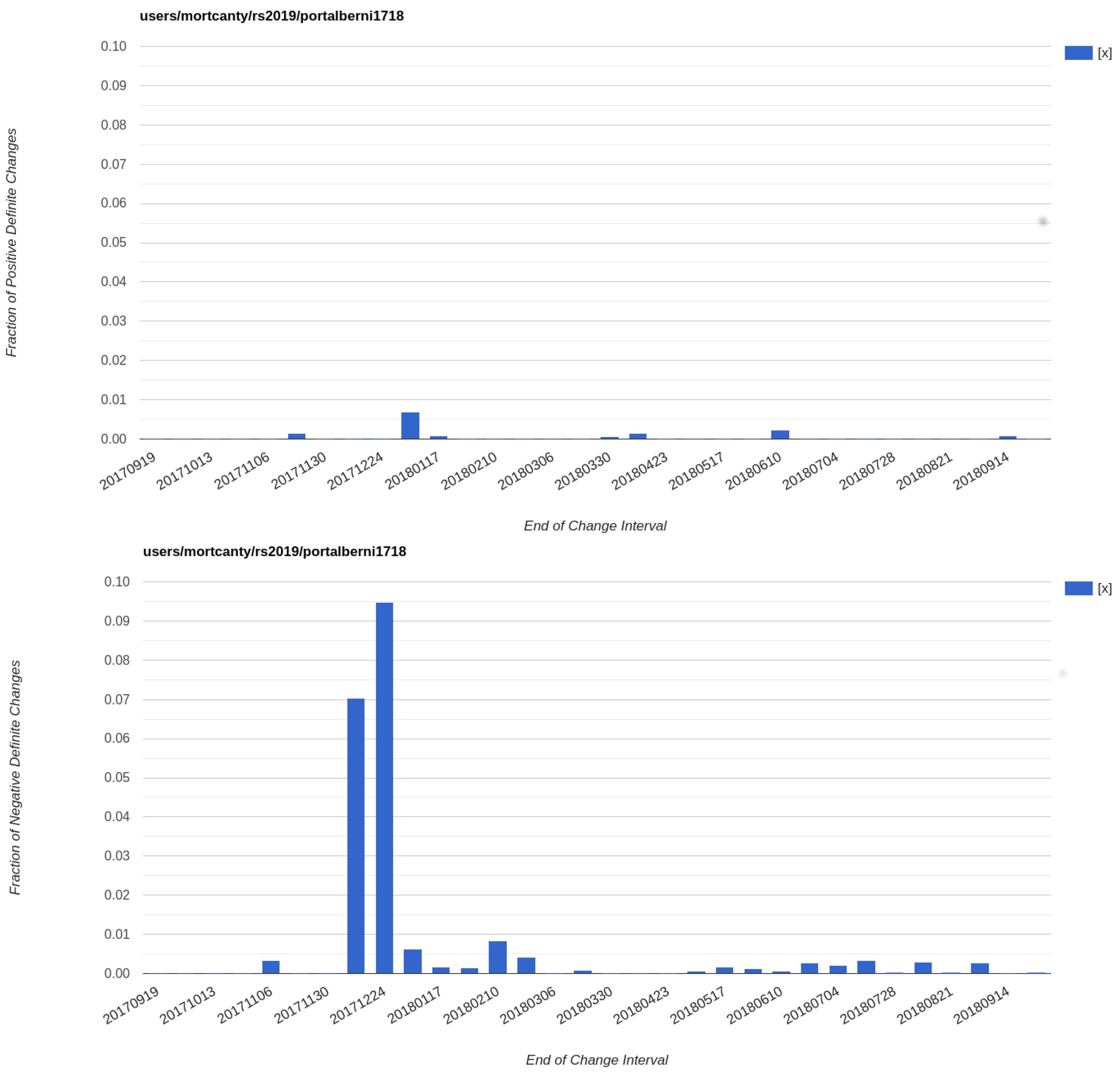
4.4. Clear Cut Logging
5. Conclusions
6. Discussion
- First of all, and most significantly, the sequential omnibus tests on the GEE are carried out at the nominal scale of the archived Sentinel-1 data (10 m). This is because of the dependence of the Wishart distribution on the equivalent number of looks (ENL). Confining analysis to a single scale precludes leveraging one of the great advantages of the Earth Engine, namely up-scaling to very large geographical regions. One way to mitigate this in future might be to download representative images with well-developed speckle statistics at different scales and then estimate the ENL values off-line, e.g., with the methods given in [24]. Then those values could be hard wired into the GEE code to allow running the algorithm at coarser scales and on larger scenes.
- The change detection algorithm is purely data driven and unsupervised: The physical cause of detected changes must be inferred from the context. Here, the Loewner order discussed in the text can offer additional information.
- It is our experience that very long time series, typically 75 images or more, can lead to stack overflow on the GEE servers. With typically a 6-day temporal resolution this still allows well over a year of continuous observation at any given location.
- The diagonal-only dual polarization matrix format necessitates resorting to the block diagonal version of the algorithm as discussed in the theory section and in [13]. It would be desirable to have access to the full dual polarization matrix. We understand that the GEE developers are considering ways to ingest single look complex (SLC) Sentinel-1 imagery, which would solve this problem: The multi-look dual polarization matrix format could then be constructed from the SLC data.
- The GEE archive is updated very quickly, the Sentinel-1 images are available within a few days of acquisition. But for timely disaster assessment this may not be good enough. Thus the tools described here will be useful only in situations which are not extremely time critical.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Tau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Mutanga, O.; Kumar, L. Google Earth Engine Applications. Remote Sens. 2019, 11, 591. [Google Scholar] [CrossRef] [Green Version]
- Muro, J.; Strauch, A.; Fitoka, E.; Tompoulidou, M.; Thonfeld, F. Mapping wetland dynamics with SAR-based change detection in the cloud. IEEE Geosci. Remote Sens. Lett. 2019. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. Automatica 1975, 11, 23–27. [Google Scholar] [CrossRef] [Green Version]
- Dostalova, A.; Hollaus, M.; Milenkovic, M.; Wagner, W. Forest area derivation from Sentinel-1 data. SPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III, 227–233. [Google Scholar]
- Bruno, M.F.; Matteo, M.G.; Mossa, M.; Morea, A.; Chiaradia, M.T.; Nutricato, R.; Nitti, D.O.; Guerriero, L.; Coletta, A. Integration of multitemporal SAR/InSAR techniques and NWM for coastal structures monitoring: Outline of the software system and of an operational service with COSMO-SkyMed data. In Proceedings of the 2016 IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems (EESMS), Bari, Italy, 13–14 June 2016. [Google Scholar] [CrossRef]
- Refice, A.; D’Addabbo, A.; Lovergine, F.P.; Tijani, K.; Morea, A.; Nutricato, R.; Bovenga, F.; Nitti, D.O. Monitoring Flood Extent and Area Through Multisensor, Multi-temporal Remote Sensing: The Strymonas (Greece) River Flood. In Flood Monitoring through Remote Sensing. Springer Remote Sensing/Photogrammetry; Refice, A., D’Addabbo, A., Capolongo, D., Eds.; Springer: Cham, Switzerland, 2018; pp. 101–113. [Google Scholar]
- Conradsen, K.; Nielsen, A.A.; Schou, J.; Skriver, H. A test statistic in the complex Wishart distribution and its application to change detection in polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 4–19. [Google Scholar] [CrossRef] [Green Version]
- Conradsen, K.; Nielsen, A.A.; Skriver, H. Determining the points of change in time series of polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3007–3024. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, A.A.; Conradsen, K.; Skriver, H.; Canty, M.J. Visualization of and software for omnibus test based change detected in a time series of polarimetric SAR data. Can. J. Remote Sens. 2017, 43, 582–592. [Google Scholar] [CrossRef]
- Akbari, V.; Anfinsen, S.N.; Doulgeris, A.P.; Eltoft, T.; Moser, G.; Serpico, S.B. Polarimetric SAR change detection with the complex Hotelling-Lawley trace statistic. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3953–3966. [Google Scholar] [CrossRef] [Green Version]
- Nascimento, A.D.C.; Frery, A.C.; Cintra, R.J. Detecting Changes in Fully Polarimetric SAR Imagery with Statistical Information Theory. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1380–1392. [Google Scholar] [CrossRef] [Green Version]
- Conradsen, K.; Nielsen, A.A.; Skriver, H. Omnibus Change Detection in Block Diagonal Covariance Matrix PolSAR Data from Sentinel-1 and Radarsat-2. 2019; in preparation. [Google Scholar]
- Nielsen, A.A.; Skriver, H.; Conradsen, K. The Loewner Order and Direction of Detected Change in Sentinel-1 and Radarsat-2 Data. IEEE Geosci. Remote Sens. Lett. 2019. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, A.A. Fast matrix based computation of eigenvalues and the Loewner order in PolSAR data. IEEE Geosci. Remote Sens. Lett. 2019. [Google Scholar] [CrossRef]
- Mitra, S.K.; Bhimasankaram, P.; Malik, S.B. Matrix Partial Orders, Shorted Operators and Applications; World Scientific: Singapore, 2010; Volume 10. [Google Scholar]
- Canty, M.J. Image Analysis, Classification, and Change Detection in Remote Sensing, with Algorithms for ENVI/IDL and Python, 4th ed.; Taylor and Francis: Abingdon, UK, 2019. [Google Scholar]
- Muro, J.; Canty, M.; Conradsen, K.; Hüttich, C.; Nielsen, A.A.; Skriver, H.; Remy, F.; Strauch, A.; Thonfeld, F.; Menz, G. Short-Term Change Detection in Wetlands Using Sentinel-1 Time Serie. Remote Sens. 2016, 8, 795. [Google Scholar] [CrossRef] [Green Version]
- Martinis, S. Automatic Near Real-Time Flood Detection in High Resolution X-Band Synthetic Aperture Radar Satellite Data Using Context-Based Classification on Irregular Graphs. Ph.D. Thesis, Fakultät für Geowissenschaften der Ludwig-Maximilians-Universität München, Munich, Germany, 2010. [Google Scholar]
- Meyer, F.J.; Ajadi, O.A.; Schultz, L.; Bell, J.; Arnoult, K.M.; Gens, R.; Nicoll, J.B. An Automatic Flood Monitoring Service from Sentinel-1 SAR: Products, Delivery Pipelines, and Performance Assessment. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 6576–6579. [Google Scholar] [CrossRef]
- Reiche, J.; Hamunyela, E.; Verbesselt, J.; Hoekman, D.; Herold, M. Improving near-real time deforestation monitoring in tropical dry forests by combining dense Sentinel-1 time series with Landsat and ALOS-2 PALSAR-2. Remote Sens. Environ. 2018, 204, 147–161. [Google Scholar] [CrossRef]
- Dyk, A.; Leckie, D.; Tinis, S.; Ortlepp, S. Canada’s National Deforestation Monitoring System: System Description, Information Report BC-X-439; Canadian Forest Service, Pacific Forestry Centre: Victoria, BC, Canada, 2015. [Google Scholar]
- Fransson, J.E.S.; Magnusson, M.; Olsson, H.; Eriksson, L.; Folkesson, K.; Sandberg, G.; Santoro, M.; Ulander, L. Detection of Clear-Cuts Using ALOS PALSAR Satellite Images. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–27 July 2007; pp. 1–4. [Google Scholar] [CrossRef]
- Anfinsen, S.; Doulgeris, A.; Eltoft, T. Estimation of the equivalent number of looks in polarimetric synthetic aperture radar imagery. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3795–3809. [Google Scholar] [CrossRef]













© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Canty, M.J.; Nielsen, A.A.; Conradsen, K.; Skriver, H. Statistical Analysis of Changes in Sentinel-1 Time Series on the Google Earth Engine. Remote Sens. 2020, 12, 46. https://doi.org/10.3390/rs12010046
Canty MJ, Nielsen AA, Conradsen K, Skriver H. Statistical Analysis of Changes in Sentinel-1 Time Series on the Google Earth Engine. Remote Sensing. 2020; 12(1):46. https://doi.org/10.3390/rs12010046
Chicago/Turabian StyleCanty, Morton J., Allan A. Nielsen, Knut Conradsen, and Henning Skriver. 2020. "Statistical Analysis of Changes in Sentinel-1 Time Series on the Google Earth Engine" Remote Sensing 12, no. 1: 46. https://doi.org/10.3390/rs12010046
APA StyleCanty, M. J., Nielsen, A. A., Conradsen, K., & Skriver, H. (2020). Statistical Analysis of Changes in Sentinel-1 Time Series on the Google Earth Engine. Remote Sensing, 12(1), 46. https://doi.org/10.3390/rs12010046