Structure-Adaptive Clutter Suppression for Infrared Small Target Detection: Chain-Growth Filtering


Abstract
:1. Introduction
2. Methodology
2.1. Chain-Growth Filtering
2.1.1. Terminology
2.1.2. The Growth Process
2.1.3. Stop Criterion
2.1.4. Filtering Model
| Algorithm 1: Chain-growth filtering. |
Input: A pixel to be filtered. Output: The chain-growth filtering response of the pixel : .
|
2.2. Adaptive Threshold for Target Segmentation
2.3. Complexity Analysis
3. Experimental Results
3.1. Experimental Setup
3.2. Evaluation Metrics
3.3. Anti-Noise Performance
3.4. Multi-Scale Target Detection
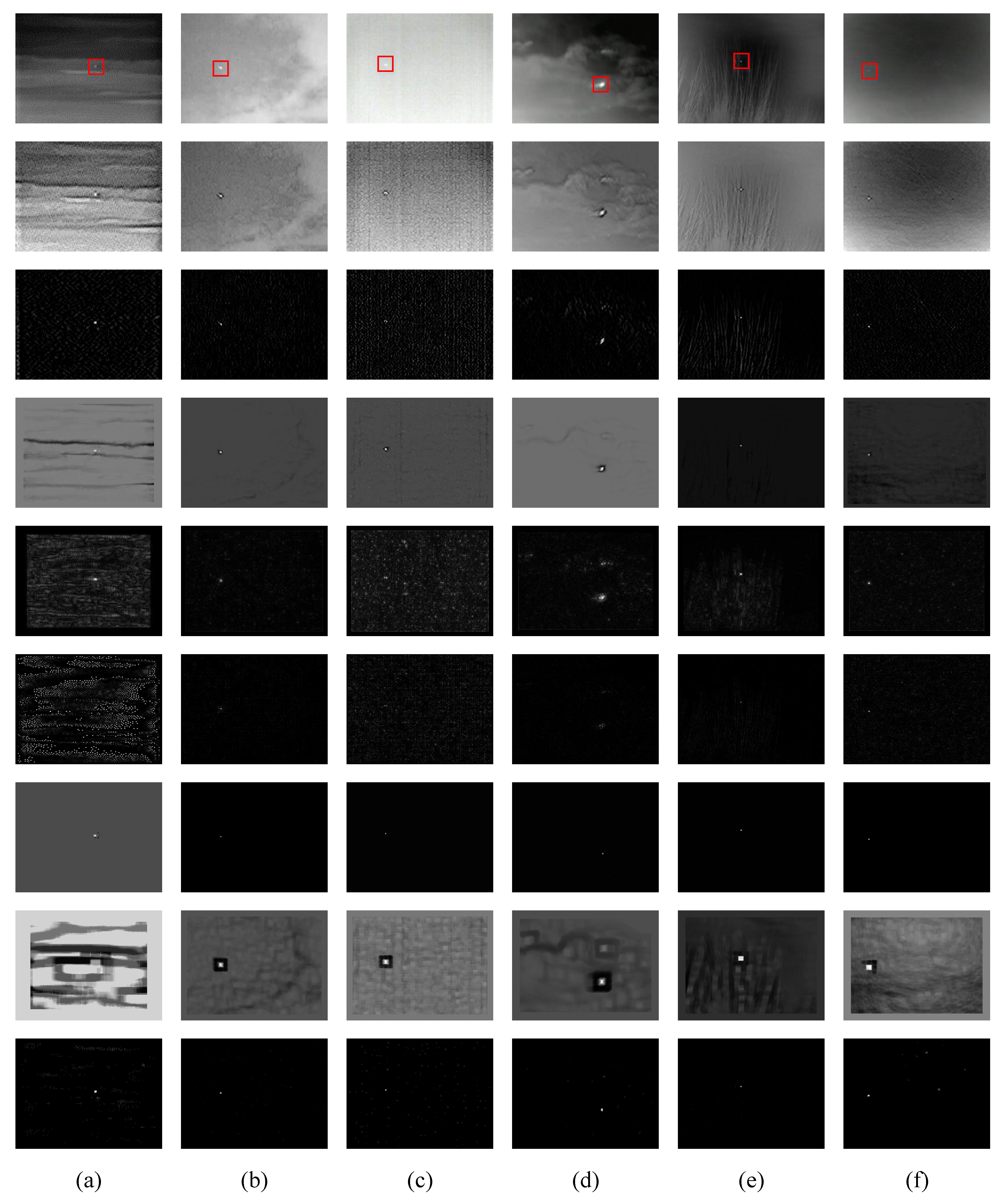
3.5. Qualitative Comparison
3.6. Quantitative Comparison
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, X.Y.; Peng, Z.M.; Kong, D.H.; He, Y.M. Infrared Dim and Small Target Detection Based on Stable Multisubspace Learning in Heterogeneous Scene. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5481–5493. [Google Scholar] [CrossRef]
- Huang, S.Q.; Peng, Z.m.; Wang, Z.R.; Wang, X.Y.; Li, M.H. Infrared Small Target Detection by Density Peaks Searching and Maximum-Gray Region Growing. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1919–1923. [Google Scholar] [CrossRef]
- Zhang, T.F.; Wu, H.; Liu, Y.; Peng, L.B.; Yang, C.P.; Peng, Z.M. Infrared Small Target Detection Based on Non-Convex Optimization with Lp-Norm Constraint. Remote Sens. 2019, 11, 559. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Zhao, M.; Deng, X.; Li, L.; Li, L.; Zhang, W. Infrared Small Target Detection Using Local and Nonlocal Spatial Information. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 3677–3689. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Li, M.H.; Peng, Z.M.; Liu, X.R. Investigating Detectability of Infrared Radiation Based on Image Evaluation for Engine Flame. Entropy. 2019, 21, 946. [Google Scholar] [CrossRef] [Green Version]
- Liu, D.; Cao, L.; Li, Z.; Liu, T.; Che, P. Infrared Small Target Detection Based on Flux Density and Direction Diversity in Gradient Vector Field. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 2528–2554. [Google Scholar] [CrossRef]
- Wang, X.Y.; Peng, Z.M.; Zhang, P.; He, Y.M. Infrared Small Target Detection via Nonnegativity-Constrained Variational Mode Decomposition. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1700–1704. [Google Scholar] [CrossRef]
- Liu, Y.; Peng, L.M.; Huang, S.; Wang, X.Y.; Wang, Y.Q.; Peng, Z.M. River detection in high-resolution SAR data using the Frangi filter and shearlet features. Remote Sens. Lett. 2019, 10, 949–958. [Google Scholar] [CrossRef]
- Zhang, L.D.; Peng, L.B.; Zhang, T.F.; Cao, S.Y.; Peng, Z.M. Infrared Small Target Detection via Non-Convex Rank Approximation Minimization Joint l2, 1 Norm. Remote Sens. 2018, 10, 1821. [Google Scholar] [CrossRef] [Green Version]
- Peng, Z.M.; Zhang, Q.H.; Wang, J.R.; Zhang, Q.P. Dim target detection based on nonlinear multifeature fusion by Karhunen-Loeve transform. Opt. Eng. 2004, 43, 2954–2959. [Google Scholar] [CrossRef]
- Wang, G.; Inigo, R.M.; Mcvey, E.S. A pipeline algorithm for detection and tracking of pixel-sized target trajectories. In Proceedings of the Signal and Data Processing of Small Targets, Orlando, FL, USA, 1 October 1990; pp. 167–178. [Google Scholar]
- Blostein, S.D.; Huang, T.S. Detecting small, moving objects in image sequences using sequential hypothesis testing. IEEE Trans. Signal Process. 1991, 39, 1611–1629. [Google Scholar] [CrossRef]
- Reed, I.S.; Gagliardi, R.M.; Stotts, L.B. Optical moving target detection with 3-D matched filtering. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 327–336. [Google Scholar] [CrossRef]
- Caefer, C.E.; Silverman, J.; Mooney, J.M. Optimization of point target tracking filters. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 15–25. [Google Scholar] [CrossRef]
- Barniv, Y. Dynamic programming solution for detecting dim moving targets. IEEE Trans. Aerosp. Electron. Syst. 1985, AES-21, 144–156. [Google Scholar] [CrossRef]
- Fan, X.S.; Xu, Z.Y.; Zhang, J.L.; Huang, Y.M.; Peng, Z.M. Infrared Dim and Small Targets Detection Method Based on Local Energy Center of Sequential Image. Math. Probl. Eng. 2017, 2017. [Google Scholar] [CrossRef] [Green Version]
- Fan, X.S.; Xu, Z.Y.; Zhang, J.L.; Huang, Y.M.; Peng, Z.M. Dim small targets detection based on self-adaptive caliber temporal-spatial filtering. Infrared Phys. Technol. 2017, 85, 465–477. [Google Scholar] [CrossRef]
- Fan, X.S.; Xu, Z.Y.; Zhang, J.L.; Huang, Y.M.; Peng, Z.M.; Wei, Z.R.; Guo, H.W. Dim small target detection based on high-order cumulant of motion estimation. Infrared Phys. Technol. 2019, 99, 86–101. [Google Scholar] [CrossRef]
- Sun, Y.; Yang, J.G.; Li, M.; An, W. Infrared small target detection via spatial–temporal infrared patch-tensor model and weighted Schatten p-norm minimization. Infrared Phys. Technol. 2019, 102, 103050. [Google Scholar] [CrossRef]
- Gao, C.Q.; Meng, D.; Yang, Y.; Wang, Y.T.; Zhou, X.F.; Hauptmann, A.G. Infrared patch-image model for small target detection in a single image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef]
- Zhang, L.D.; Peng, Z.M. Infrared Small Target Detection Based on Partial Sum of the Tensor Nuclear Norm. Remote Sens. 2019, 11, 382. [Google Scholar] [CrossRef] [Green Version]
- Deshpande, S.D.; Er, M.H.; Venkateswarlu, R.; Chan, P. Max-mean and max-median filters for detection of small targets. In Proceedings of the Signal and Data Processing of Small Targets, Denver, CO, USA, 4 October 1999; pp. 74–84. [Google Scholar] [CrossRef]
- Zhao, Y.; Pan, H.B.; Du, C.P.; Peng, Y.R.; Zheng, Y. Bilateral two-dimensional least mean square filter for infrared small target detection. Infrared Phys. Technol. 2014, 65, 17–23. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J.; Yang, K. Adaptive detection for infrared small target under sea-sky complex background. Electron. Lett. 2004, 40, 1083–1085. [Google Scholar] [CrossRef]
- Wang, P.; Tian, J.W.; Gao, C.Q. Infrared small target detection using directional highpass filters based on LS-SVM. Electron. Lett. 2009, 45, 156–158. [Google Scholar] [CrossRef]
- Peng, L.B.; Zhang, T.F.; Huang, S.Q.; Pu, T.; Liu, Y.H.; Lv, Y.X.; Zheng, Y.C.; Peng, Z.M. Infrared small-target detection based on multi-directional multi-scale high-boost response. Opt. Rev. 2019, 26, 568–582. [Google Scholar] [CrossRef]
- Tom, V.T.; Peli, T.; Leung, M.; Bondaryk, J.E. Morphology-based algorithm for point target detection in infrared backgrounds. In Proceedings of the Signal and Data Processing of Small Targets, Orlando, FL, USA, 22 October 1993; pp. 2–12. [Google Scholar]
- Bai, X.Z.; Zhou, F.G. Analysis of new top-hat transformation and the application for infrared dim small target detection. Pattern Recogn. 2010, 43, 2145–2156. [Google Scholar] [CrossRef]
- Bai, X.Z.; Zhou, F.G.; Jin, T. Enhancement of dim small target through modified top-hat transformation under the condition of heavy clutter. Signal Process. 2010, 90, 1643–1654. [Google Scholar] [CrossRef]
- Meng, W.; Jin, T.; Zhao, X.W. Adaptive method of dim small object detection with heavy clutter. Appl. Optics. 2013, 52, D64–D74. [Google Scholar] [CrossRef]
- Gu, S.H.; Zhang, L.; Zuo, W.M.; Feng, X.C. Weighted nuclear norm minimization with application to image denoising. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2862–2869. [Google Scholar]
- Sun, Q.; Xiang, S.; Ye, J.P. Robust principal component analysis via capped norms. In Proceedings of the 19th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Chicago, IL, USA, 11–14 August 2013; pp. 311–319. [Google Scholar]
- Hu, Y.; Zhang, D.B.; Ye, J.P.; Li, X.L.; He, X.F. Fast and accurate matrix completion via truncated nuclear norm regularization. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 2117–2130. [Google Scholar] [CrossRef]
- Nie, F.P.; Huang, H.; Ding, C. Low-rank matrix recovery via efficient schatten p-norm minimization. In Proceedings of the Twenty-Sixth AAAI Conference on Artificial Intelligence, Toronto, ON, Canada, 22–26 July 2012; pp. 655–661. [Google Scholar]
- Guo, J.; Wu, Y.Q.; Dai, Y.M. Small target detection based on reweighted infrared patch-image model. IET Image Process. 2017, 12, 70–79. [Google Scholar] [CrossRef]
- Zhang, T. Analysis of multi-stage convex relaxation for sparse regularization. J. Mach. Learn. Res. 2010, 11, 1081–1107. [Google Scholar]
- He, Y.J.; Li, M.; Zhang, J.L.; An, Q. Small infrared target detection based on low-rank and sparse representation. Infrared Phys. Technol. 2015, 68, 98–109. [Google Scholar] [CrossRef]
- Dai, Y.M.; Wu, Y.Q.; Song, Y. Infrared small target and background separation via column-wise weighted robust principal component analysis. Infrared Phys. Technol. 2016, 77, 421–430. [Google Scholar] [CrossRef]
- Liu, X.G.; Chen, Y.P.; Peng, Z.M.; Wu, J. Total variation with overlapping group sparsity and Lp quasinorm for infrared image deblurring under salt-and-pepper noise. J. Electron. Imaging 2019, 28, 043031. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; He, Y.J.; Zhang, J.L. Small infrared target detection based on low-rank representation. In Proceedings of the International Conference on Image and Graphics, Tianjin, China, 13–16 August 2015; pp. 393–401. [Google Scholar]
- Liu, X.G.; Chen, Y.P.; Peng, Z.M.; Wu, J.; Wang, Z.R. Infrared image super-resolution reconstruction based on quaternion fractional order total variation with Lp quasinorm. Appl. Sci. 2018, 8, 1864. [Google Scholar] [CrossRef] [Green Version]
- Dai, Y.M.; Wu, Y.Q. Reweighted infrared patch-tensor model with both nonlocal and local priors for single-frame small target detection. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 10, 3752–3767. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.; Liu, S.M.; Deng, L.Z.; Li, Y.S.; Xiao, F. Infrared Small Target Detection via Low-Rank Tensor Completion With Top-Hat Regularization. IEEE Trans. Geosci. Remote Sens. 2019. [Google Scholar] [CrossRef]
- Chen, C.P.; Li, H.; Wei, Y.T.; Xia, T.; Tang, Y.Y. A local contrast method for small infrared target detection. IEEE Trans. Geosci. Remote Sens. 2013, 52, 574–581. [Google Scholar] [CrossRef]
- Han, J.H.; Ma, Y.; Huang, J.; Mei, X.G.; Ma, J.Y. An Infrared Small Target Detecting Algorithm Based on Human Visual System. IEEE Geosci. Remote Sens. Lett. 2016, 13, 452–456. [Google Scholar] [CrossRef]
- Wei, Y.T.; You, X.G.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recogn. 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Shi, Y.F.; Wei, Y.T.; Yao, H.; Pan, D.H.; Xiao, G.R. High-Boost-Based Multiscale Local Contrast Measure for Infrared Small Target Detection. IEEE Geosci. Remote Sens. Lett. 2018, 15, 33–37. [Google Scholar] [CrossRef]
- Liu, J.; He, Z.Q.; Chen, Z.L.; Shao, L. Tiny and Dim Infrared Target Detection Based on Weighted Local Contrast. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1780–1784. [Google Scholar] [CrossRef]
- Bai, X.Z.; Bi, Y.G. Derivative entropy-based contrast measure for infrared small-target detection. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2452–2466. [Google Scholar] [CrossRef]
- Han, J.H.; Liang, K.; Zhou, B.; Zhu, X.Y.; Zhao, J.; Zhao, L.L. Infrared Small Target Detection Utilizing the Multiscale Relative Local Contrast Measure. IEEE Geosci. Remote Sens. Lett. 2018, 15, 612–616. [Google Scholar] [CrossRef]
- Guan, X.W.; Peng, Z.M.; Huang, S.Q.; Chen, Y.P. Gaussian Scale-Space Enhanced Local Contrast Measure for Small Infrared Target Detection. IEEE Geosci. Remote Sens. Lett. 2019. [Google Scholar] [CrossRef]
- Du, P.; Hamdulla, A. Infrared Small Target Detection Using Homogeneity-Weighted Local Contrast Measure. IEEE Geosci. Remote Sens. Lett. 2019. [Google Scholar] [CrossRef]
- Deng, H.; Liu, J.G. Infrared small target detection based on the self-information map. Infrared Phys. Technol. 2011, 54, 100–107. [Google Scholar] [CrossRef]
- Zhao, Y.; Pan, H.B.; Du, C.P.; Zheng, Y. Principal curvature for infrared small target detection. Infrared Phys. Technol. 2015, 69, 36–43. [Google Scholar] [CrossRef]
- Peng, L.B.; Zhang, T.F.; Liu, Y.H.; Li, M.H.; Peng, Z.M. Infrared Dim Target Detection Using Shearlet’s Kurtosis Maximization under Non-Uniform Background. Symmetry 2019, 11, 723. [Google Scholar] [CrossRef] [Green Version]
- Bi, Y.G.; Chen, J.Z.; Sun, H.; Bai, X.Z. Fast Detection of Distant, Infrared Targets in a Single Image Using Multi-Order Directional Derivatives. IEEE Trans. Aerosp. Electron. Syst. 2019. [Google Scholar] [CrossRef]
- Zhou, J.; Kwan, C.; Ayhan, B.; Eismann, M.T. A novel cluster kernel RX algorithm for anomaly and change detection using hyperspectral images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6497–6504. [Google Scholar] [CrossRef]
- Xia, C.Q.; Li, X.R.; Zhao, L.Y. Infrared small target detection via modified random walks. Remote Sens. 2018, 10, 2004. [Google Scholar] [CrossRef] [Green Version]
- He, K.M.; Sun, J.; Tang, X.O. Guided image filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 1397–1409. [Google Scholar] [CrossRef] [PubMed]
- Kim, S. Min-local-LoG filter for detecting small targets in cluttered background. Electron. Lett. 2011, 47, 105–106. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tab | Frame Number | Scene | Image Size (pixels) | Clutter Description |
|---|---|---|---|---|
| (a) | 1 | noisy sky | heavy noise; a few clouds | |
| (b) | 1 | cloudy sky | strong edges of irregular cloud | |
| (c) | 1 | building and sky | a circular building; heavy noise | |
| (d) | 1 | bridge and sea | line-shaped clutters; complex background | |
| (e) | 1 | grounds | complicated grounds; bright buildings | |
| (f) | 1 | mountains | boundaries; bright rocks | |
| (g) | 12 | cloudy sky | noise and some clouds | |
| (h) | 60 | cloudy sky | heavy and irregular clouds | |
| (i) | 67 | noisy sky | heavy noise; bright background | |
| (j) | 400 | cloudy sky | complicated cloud clutters | |
| (k) | 185 | trees and sky | curve-like clutters with irregular shapes | |
| (l) | 200 | sky | pure background; bright halos |
| Methods | Metrics | (a) | (b) | (c) | (d) | (e) | (f) | (g) | (h) | (i) | (j) | (k) | (l) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min-Local-LoG | SCRg | 1.20 | 0.65 | 0.95 | 0.66 | 0.97 | 0.46 | 1.43 | 0.49 | 0.65 | 0.77 | 1.13 | 1.70 |
| BSF | 1.01 | 1.01 | 1.00 | 1.00 | 1.00 | 1.02 | 1.00 | 1.00 | 1.00 | 1.00 | 1.01 | 1.00 | |
| Time(ms) | 35 | 38 | 36 | 90 | 71 | 89 | 35 | 92 | 87 | 62 | 79 | 77 | |
| LS-SVM | SCRg | 2.37 | 2.51 | 1.35 | 2.91 | 6.25 | 1.37 | 7.07 | 1.26 | 0.38 | 3.17 | 1.87 | 7.70 |
| BSF | 1.02 | 1.08 | 1.01 | 1.06 | 1.04 | 1.11 | 1.05 | 1.08 | 1.01 | 1.36 | 1.02 | 1.04 | |
| Time(ms) | 23 | 26 | 25 | 36 | 29 | 37 | 23 | 36 | 35 | 27 | 31 | 30 | |
| MPCM | SCRg | 4.91 | 5.33 | 2.58 | 1.85 | 1.96 | 2.04 | 1.64 | 1.80 | 1.83 | 1.33 | 9.99 | 12.46 |
| BSF | 1.07 | 1.06 | 1.00 | 1.11 | 1.00 | 1.71 | 1.01 | 1.54 | 1.19 | 1.51 | 1.44 | 1.04 | |
| Time(ms) | 54 | 52 | 59 | 22 | 15 | 23 | 59 | 22 | 24 | 11 | 13 | 13 | |
| HB-MLCM | SCRg | 2.55 | 2.36 | 2.42 | 3.92 | 3.50 | 0.87 | 4.50 | 1.02 | 0.58 | 0.99 | 2.72 | 9.77 |
| BSF | 1.04 | 1.13 | 1.05 | 1.06 | 1.01 | 1.16 | 1.02 | 1.12 | 1.01 | 1.21 | 1.06 | 1.07 | |
| Time(ms) | 56 | 59 | 56 | 24 | 16 | 25 | 57 | 24 | 23 | 11 | 12 | 12 | |
| MWLCM | SCRg | 1.39 | 1.51 | 2.97 | 1.22 | 5.56 | 0.66 | 1.82 | 1.73 | 1.11 | 0.34 | 5.65 | 5.10 |
| BSF | 1.01 | 1.08 | 1.02 | 1.05 | 1.01 | 1.06 | 1.00 | 1.01 | 1.00 | 1.17 | 1.05 | 1.01 | |
| Time(ms) | 50 | 52 | 57 | 21 | 16 | 21 | 51 | 22 | 22 | 11 | 13 | 12 | |
| DECM | SCRg | 15.65 | 25.85 | 16.34 | 24.40 | 7.63 | 6.13 | 9.71 | 5.92 | 6.19 | 10.26 | 46.10 | 164.0 |
| BSF | 1.89 | 3.55 | 1.58 | 2.67 | 1.03 | 2.63 | 1.17 | 1.20 | 1.14 | 1.15 | 3.04 | 3.24 | |
| Time(s) | 18.98 | 19.03 | 18.72 | 96.65 | 74.87 | 95.98 | 18.82 | 96.02 | 96.18 | 55.68 | 68.96 | 66.73 | |
| RLCM | SCRg | 0.65 | 1.80 | 0.72 | 1.02 | 0.25 | 0.52 | 0.28 | 0.66 | 0.63 | 1.13 | 1.24 | 1.16 |
| BSF | 1.04 | 1.40 | 1.02 | 1.11 | 1.00 | 1.33 | 1.00 | 1.06 | 1.03 | 1.05 | 1.18 | 1.02 | |
| Time(s) | 0.74 | 0.72 | 0.74 | 3.94 | 2.71 | 3.98 | 0.75 | 3.96 | 3.93 | 2.08 | 2.60 | 2.54 | |
| Proposed Method | SCRg | 24.85 | 26.47 | 30.00 | 83.85 | 151.2 | 12.19 | 13.04 | 95.05 | 92.25 | 110.6 | 126.7 | 178.2 |
| BSF | 1.61 | 9.15 | 1.41 | 2.93 | 4.07 | 2.77 | 4.74 | 2.62 | 1.19 | 3.13 | 3.44 | 1.61 | |
| Time(s) | 1.06 | 1.08 | 1.06 | 5.50 | 4.00 | 5.51 | 1.06 | 5.50 | 5.52 | 3.06 | 3.76 | 3.71 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, S.; Liu, Y.; He, Y.; Zhang, T.; Peng, Z. Structure-Adaptive Clutter Suppression for Infrared Small Target Detection: Chain-Growth Filtering. Remote Sens. 2020, 12, 47. https://doi.org/10.3390/rs12010047
Huang S, Liu Y, He Y, Zhang T, Peng Z. Structure-Adaptive Clutter Suppression for Infrared Small Target Detection: Chain-Growth Filtering. Remote Sensing. 2020; 12(1):47. https://doi.org/10.3390/rs12010047
Chicago/Turabian StyleHuang, Suqi, Yuhan Liu, Yanmin He, Tianfang Zhang, and Zhenming Peng. 2020. "Structure-Adaptive Clutter Suppression for Infrared Small Target Detection: Chain-Growth Filtering" Remote Sensing 12, no. 1: 47. https://doi.org/10.3390/rs12010047
APA StyleHuang, S., Liu, Y., He, Y., Zhang, T., & Peng, Z. (2020). Structure-Adaptive Clutter Suppression for Infrared Small Target Detection: Chain-Growth Filtering. Remote Sensing, 12(1), 47. https://doi.org/10.3390/rs12010047