A Deep Learning Trained Clear-Sky Mask Algorithm for VIIRS Radiometric Bias Assessment




Abstract
:1. Introduction
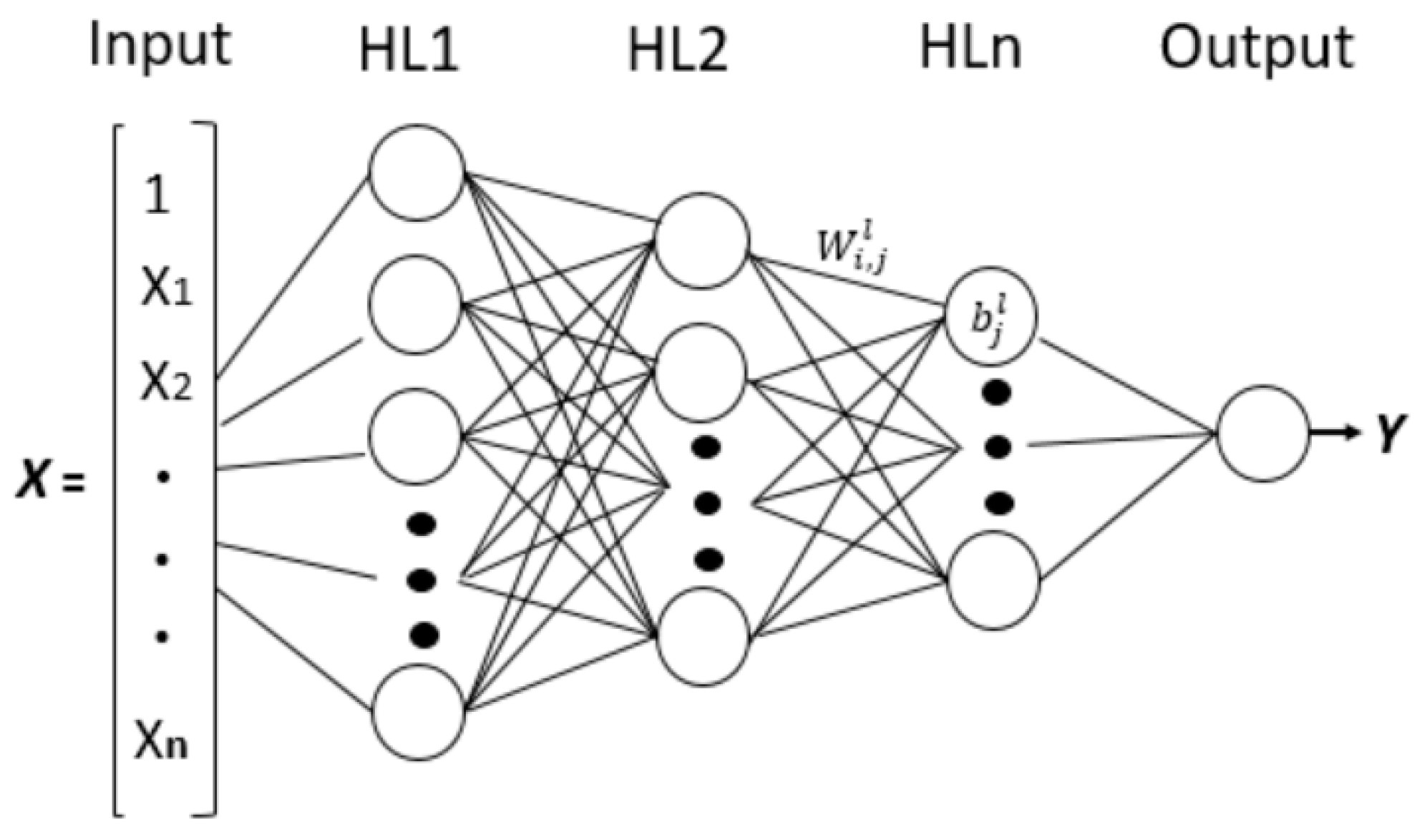
2. FCDN-CSM Network Architecture
2.1. Basic Concept of FCDN
2.2. Data Input and Output
2.3. FCDN-CSM Architecture
3. Results
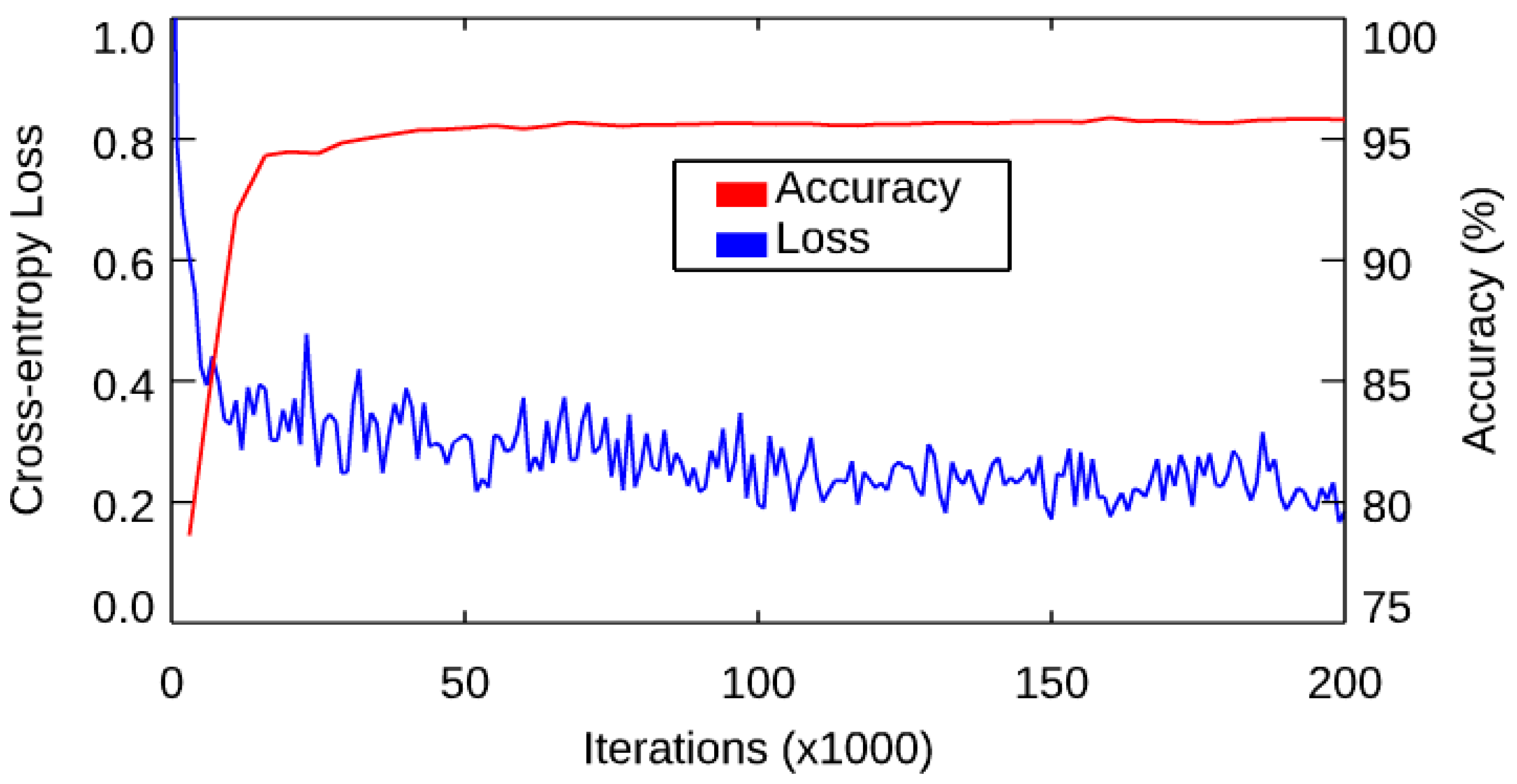
3.1. FCDN-CSM Training and Testing Using S-NPP Data
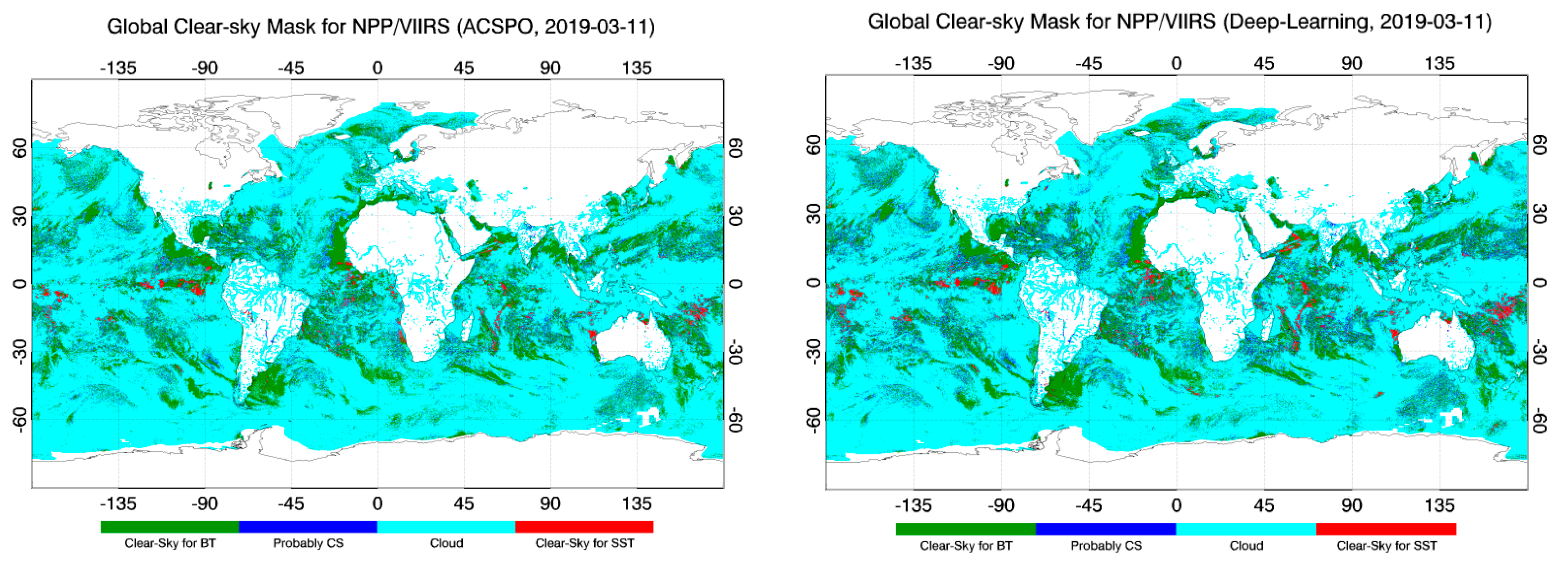
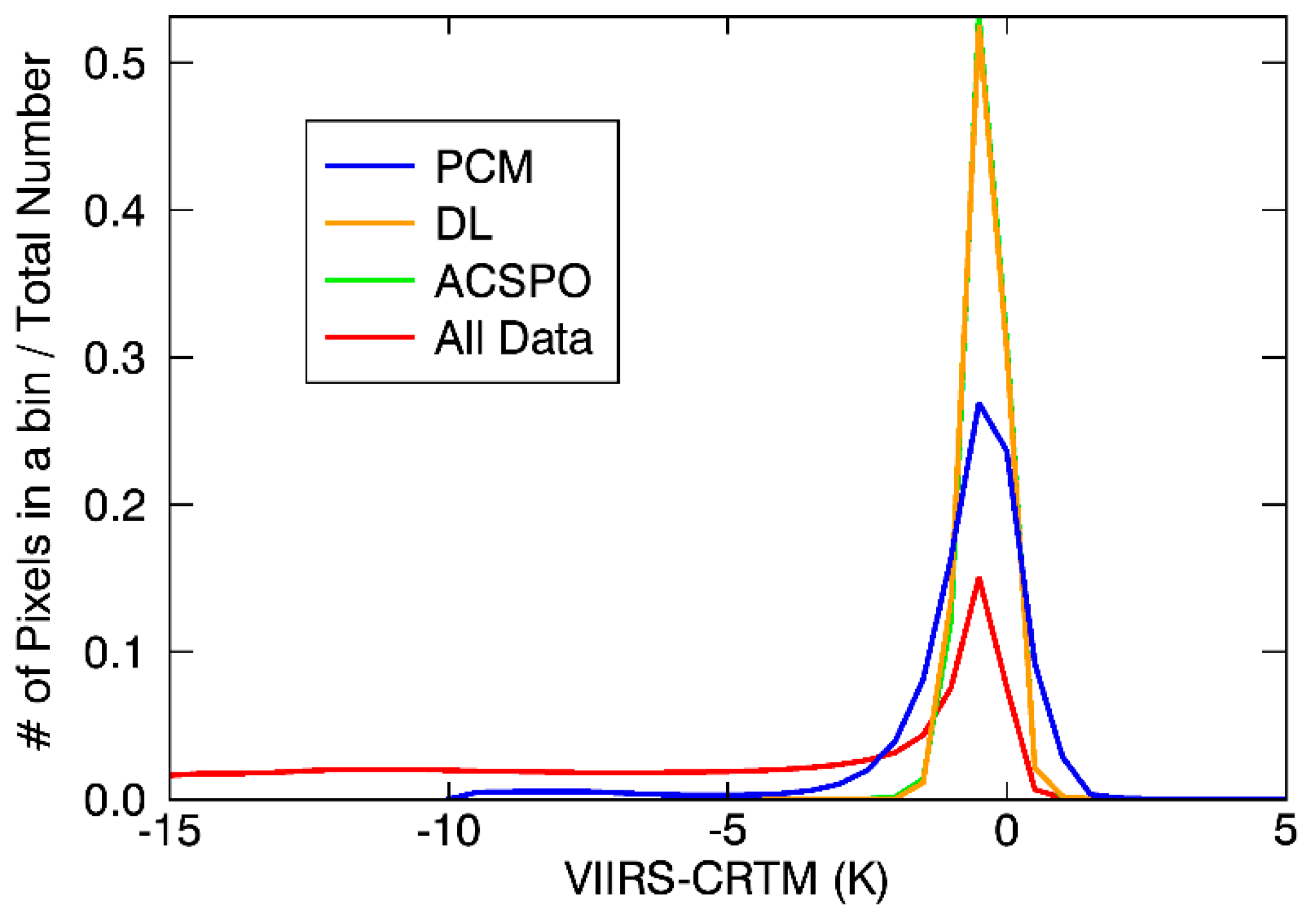
3.2. FCDN-CSM Validation Using O-M Biases
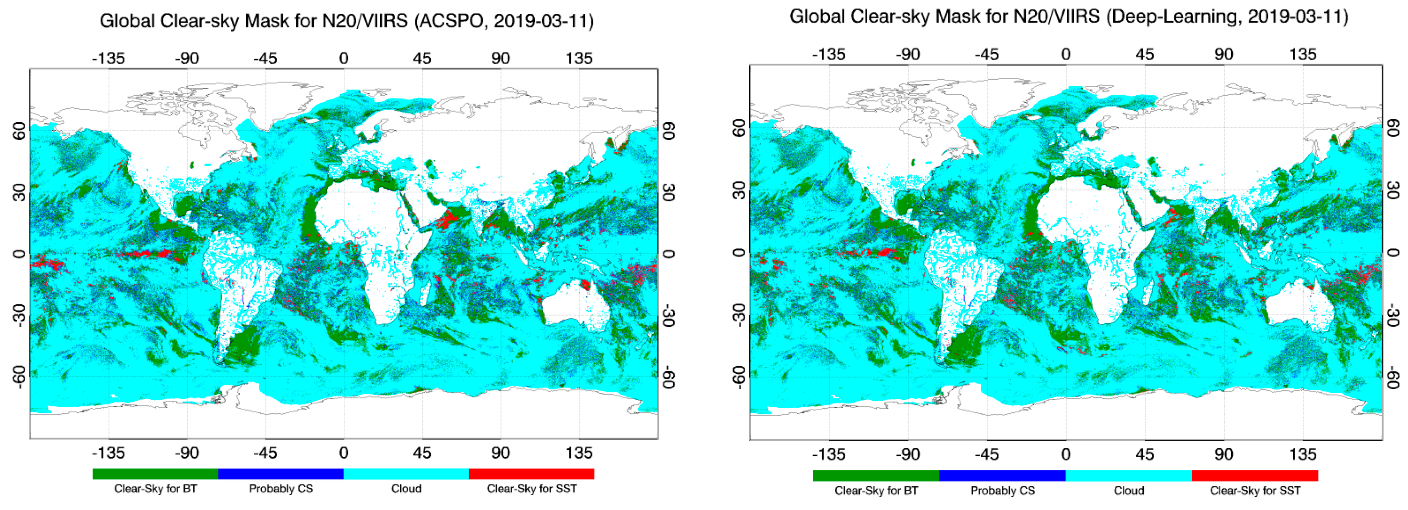
3.3. NOAA-20 CSM Retrieval Using FCDN-CSM
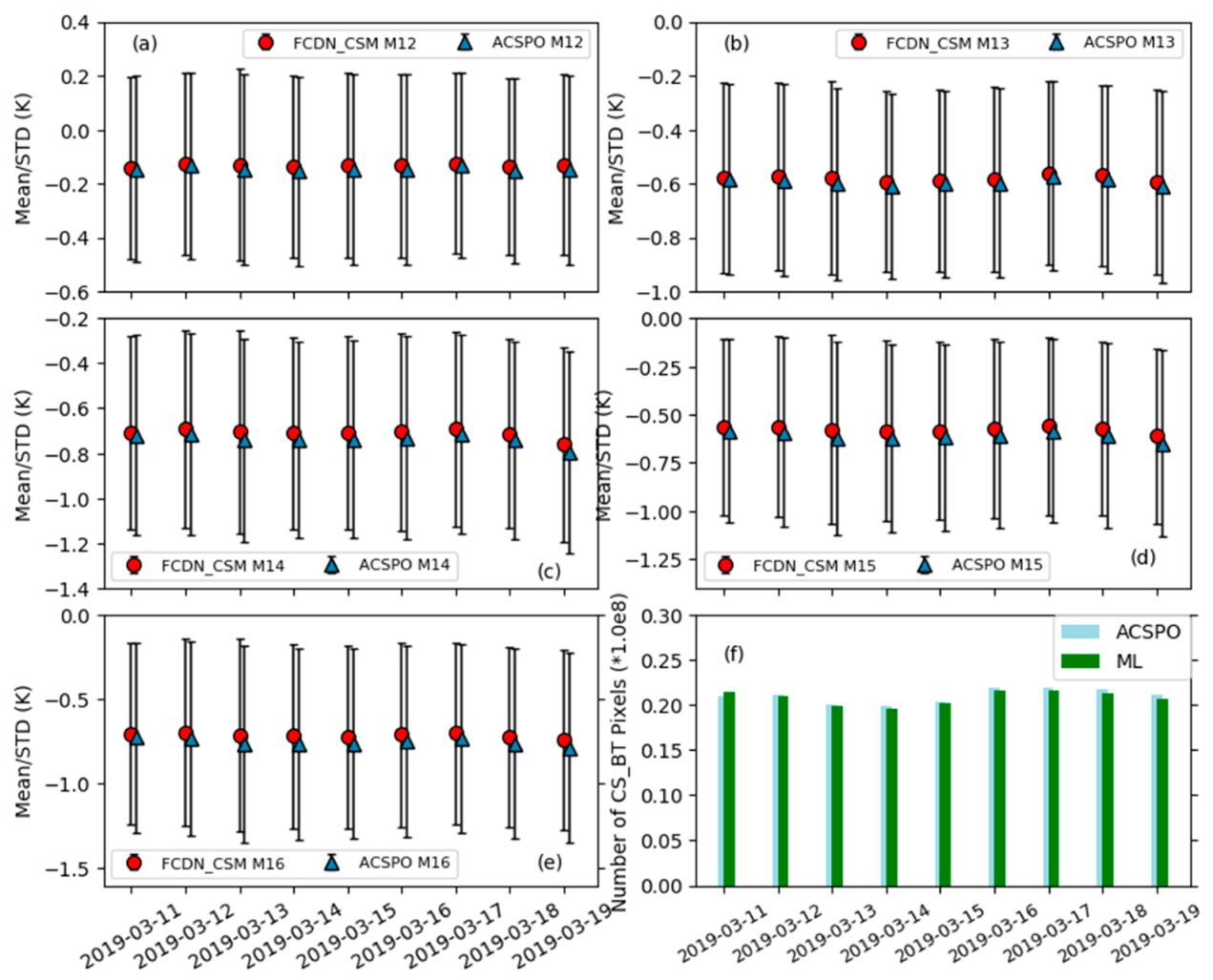
3.4. Stability of the FCDN-CSM
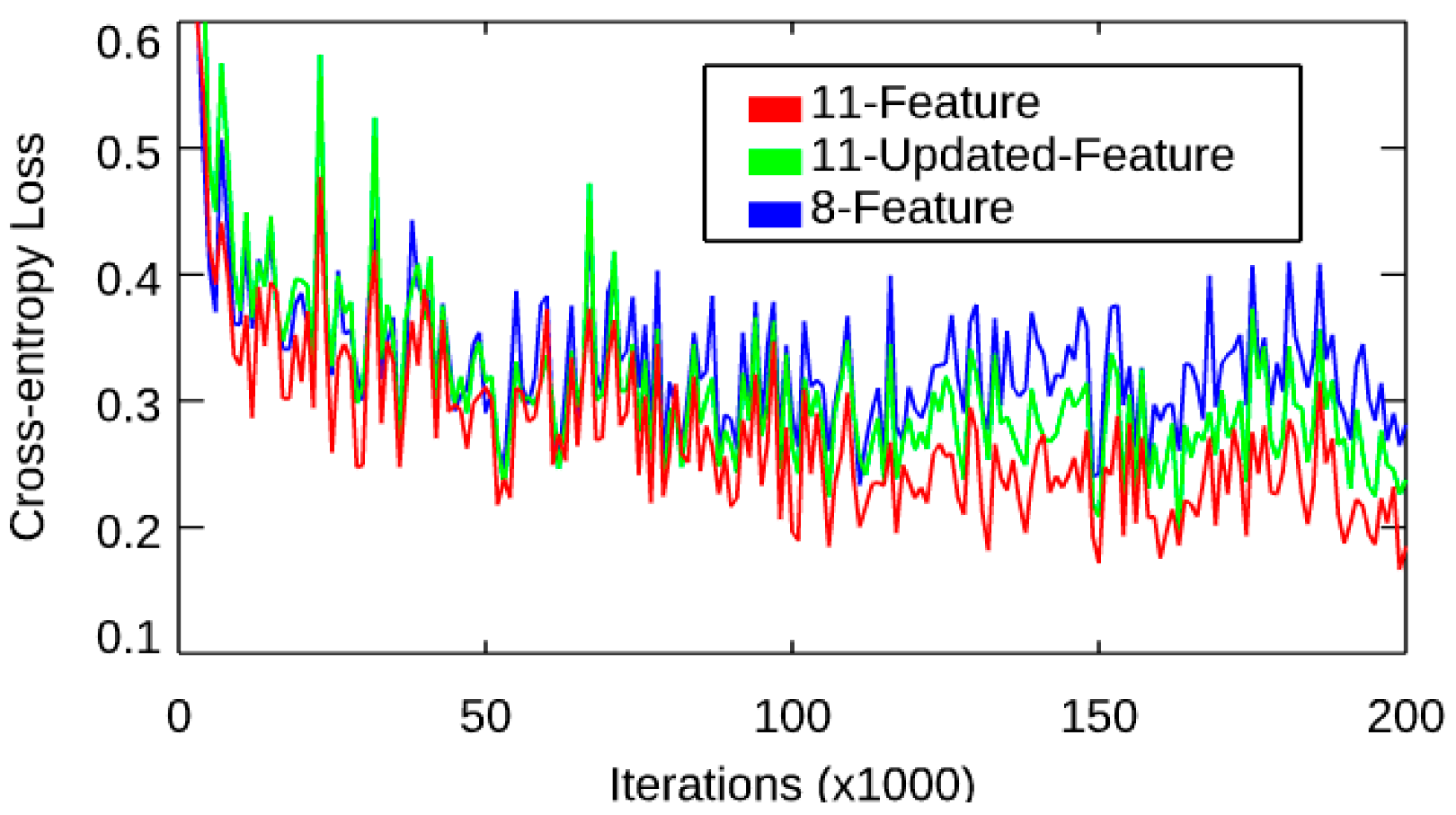
3.5. Selection of Important Features
4. Discussion
5. Conclusions and Future Work
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Liang, X.; Ignatov, A.; Kihai, Y. Implementation of the Community Radiative Transfer Model (CRTM) in Advanced Clear-Sky Processor for Oceans (ACSPO) and validation against nighttime AVHRR radiances. J. Geophys. Res. 2009, 114, D06112. [Google Scholar] [CrossRef]
- Liang, X.; Ignatov, A. Monitoring of IR Clear-sky Radiances over Oceans for SST (MICROS). J. Atmos. Ocean. Technol. 2011, 28. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Ignatov, A. AVHRR, MODIS, and VIIRS radiometric stability and consistency in SST bands. J. Geophys. Res. 2013, 118. [Google Scholar] [CrossRef]
- Liang, X.; Ignatov, A. Preliminary Inter-Comparison between AHI, VIIRS and MODIS Clear-Sky Ocean Radiances for Accurate SST Retrievals. Remote Sens. 2016, 8, 203. [Google Scholar] [CrossRef] [Green Version]
- Uprety, S.; Cao, C.; Xiong, X.; Blonski, S.; Wu, A.; Shao, X. Radiometric intercomparison between Suomi-NPPVIIRS and AquaMODIS reflective solar bands using simultaneous nadir overpass in the low latitudes. J. Atmos. Ocean. Technol. 2013, 30, 2720–2736. [Google Scholar] [CrossRef]
- Wang, W.; Cao, C.; Ignatov, A.; Liang, X.; Li, Z.; Wang, L.; Zhang, B.; Blonski, S.; Li, J. Improving the Calibration of Suomi NPP VIIRS Thermal Emissive Bands during Blackbody Warm-Up/Cool-Down. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1977–1994. [Google Scholar] [CrossRef]
- Cao, C.; Wang, W.; Blonski, S.; Zhang, B. Radiometric traceability diagnosis and bias correction for the Suomi NPP VIIRS long-wave infrared channels during blackbody unsteady states. J. Geophys. Res. Atmos. 2017, 122, 5286–5297. [Google Scholar] [CrossRef]
- Liu, Q.; Liang, X.; Han, Y.; van Delst, P.; Chen, Y.; Ignatov, A.; Weng, F. Effect of out-of-band response in NOAA-16 AVHRR Channel 3B on top-of-atmosphere radiances calculated with the Community Radiative Transfer Model. J. Atmos. Ocean. Technol. 2009. [Google Scholar] [CrossRef]
- Cao, C.; Weinreb, M.; Xu, H. Predicting Simultaneous Nadir Overpasses among Polar-Orbiting Meteorological Satellites for the Intersatellite Calibration of Radiometers. J. Atmos. Ocean. Technol. 2004, 21, 537–542. [Google Scholar] [CrossRef]
- Wang, L.; Cao, C.; Ciren, P. Assessing NOAA-16 HIRS Radiance Accuracy Using Simultaneous Nadir Overpass Observations from AIRS. J. Atmos. Ocean. Technol. 2007, 24, 1546–1561. [Google Scholar] [CrossRef]
- Wang, L.; Wu, X.; Goldberg, M.; Cao, C.; Li, Y.; Sohn, S. Comparison of AIRS and IASI Radiances Using GOES Imagers as Transfer Radiometers toward Climate Data Records. J. Appl. Meterol. Climatol. 2010, 49, 478–492. [Google Scholar] [CrossRef]
- Petrenko, B.; Ignatov, A.; Kihai, Y.; Heidinger, A. Clearsky mask for the Advanced Clear-Sky Processor for Oceans. J. Atmos. Ocean. Technol. 2010, 27, 1609–1623. [Google Scholar] [CrossRef]
- Liu, Q.; Simmer, C.; Ruprect, E. Estimating longwave net radiation at sea surface from the Special Sensor Microwave/Imager (SSM/I). J. Appl. Meteorol. 1997, 36, 919–930. [Google Scholar] [CrossRef] [Green Version]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine learning in geosciences and remote sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Collins, W.; Tissot, P. An artificial neural network model to predict thunderstorms within 400 km2 South Texas domains. Meteorol. Appl. 2015, 22, 650–665. [Google Scholar] [CrossRef]
- McGovern, A.; Elmore, K.L.; Gagne, D.J.; Haupt, S.E.; Karstens, C.D.; Lagerquist, R.; Smith, T.; Williams, J.K. Using artificial intelligence to improve real-time decision making for high-impact weather. Bull. Am. Meteorol. Soc. 2017, 98, 2073–2090. [Google Scholar] [CrossRef]
- Chapman, W.E.; Subramanian, A.C.; Delle Monache, L.; Xie, S.P.; Ralph, F.M. Improving Atmospheric River Forecasts with Machine Learning. Geophys. Res. Lett. 2019, 46, 10627–10635. [Google Scholar] [CrossRef]
- Lopatka, A. Meteorologists predict better weather forecasting with AI. Phys. Today 2019, 72, 32–34. [Google Scholar] [CrossRef]
- Alom, M.Z.; Taha, T.M.; Yakopcic, C.; Westberg, S.; Sidike, P.; Nasrin, M.S.; Hasan, M.; van Essen, B.C.; Awwal, A.A.S.; Asari, V.K. A State-of-the-Art Survey on Deep Learning Theory and Architectures. Electronics 2019, 8, 292. [Google Scholar] [CrossRef] [Green Version]
- Sengupta, S.; Basak, S.; Saikia, P.; Paul, S.; Tsalavoutis, V.; Atiah, F.D.; Ravi, V.; Peters, R.A., II. A Review of Deep Learning with Special Emphasis on Architectures. Appl. Recent Trends Prepr. 2019, 2019020233. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Jeppesen, J.H.; Jacobsen, R.H.; Inceoglu, F.; Toftegaard, T.S. A cloud detection algorithm for satellite imagery based on deep learning. Remote Sens. Environ. 2019, 229, 247–259. [Google Scholar] [CrossRef]
- Hughes, M.J.; Kennedy, R. High-Quality Cloud Masking of Landsat 8 Imagery Using Convolutional Neural Networks. Remote Sens. 2019, 11, 2591. [Google Scholar] [CrossRef] [Green Version]
- Dronner, J.; Korfhage, N.; Egli, S.; Muhling, M.; Thies, B.; Bendix, J.; Freisleben, B.; Seeger, B. Fast cloud segmentation using convolutional neural networks. Remote Sens. 2018, 10, 1782. [Google Scholar] [CrossRef] [Green Version]
- McCulloch, W.S.; Pitts, W.H. A logical calculus of the ideas immanent in nervous activity. Bull. Math. Biophys. 1943, 5, 115–133. [Google Scholar] [CrossRef]
- Zadeh, R.B.; Ramsundar, B. TensorFlow for Deep Learning: From Linear Regression to Reinforcement Learning; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2018. [Google Scholar]
- Sapper, J.; Stroup, J. ACSPO-VIIRS Version 2.40 External User’s Manual; NOAA/NESDIS/OSPO/ESPC-RIBK-13-090024; NESDIS, NOAA: Silver Spring, MD, USA, 2015.
- Liang, X.; Ignatov, A. Validation and Improvements of Daytime CRTM Performance Using AVHRR IR 3.7 μm Band. In Proceedings of the 13th AMS Conference on Atmospheric Radiation, Portland, OR, USA, 7 May 2010. [Google Scholar]
- Marsland, S. Machine Learning: An Algorithmic Perspective; Chapman and Hall/CRC: Boca Raton, FL, USA, 2009; ISBN1 10 1420067184. ISBN2 13 9781420067187. [Google Scholar]
- Jin, J.; Li, M.; Jin, L. Data Normalization to Accelerate Training for Linear Neural Net to Predict Tropical Cyclone Tracks. Math. Probl. Eng. 2015, 2015, 931629. [Google Scholar] [CrossRef] [Green Version]
- Sola, J.; Sevilla, J. Importance of input data normalization for the application of neural networks to complex industrial problems. IEEE Trans. Nucl. Sci. 1997, 44, 1464–1468. [Google Scholar] [CrossRef]
- Davis, J.; Goadrich, M. The Relationship between Precision-Recall and ROC Curves. In Proceedings of the 23rd International Conference on Machine Learning, Pittsburgh, PA, USA, 25–29 June 2006; pp. 233–240. [Google Scholar]
- Stowe, L.L.; Davis, P.A.; McClain, E.P. Scientific basis and initial evaluation of the CLAVR-1 global clear/cloud classification algorithm for the Advanced Very High Resolution Radiometer. J. Atmos. Ocean. Technol. 1999, 16, 656–681. [Google Scholar] [CrossRef]
- Cao, C.; Blonski, S.; Wang, W.; Uprety, S.; Shao, X.; Choi, J.; Lynch, E.; Kalluri, S. NOAA-20 VIIRS on-orbit performance, data quality, and operational Cal/Val support. In Proceedings of the SPIE 10781, Earth Observing Missions and Sensors: Development, Implementation, and Characterization V, International Society for Optics and Photonics, Honolulu, HI, USA, 23 October 2018. [Google Scholar]
- Kopp, T.J.; Thomas, W.; Heidinger, A.K.; Botambekov, D.; Frey, R.A.; Hutchison, K.D.; Iisager, B.D.; Brueske, K.; Reed, B. The VIIRS Cloud Mask: Progress in the first year of S-NPP toward a common cloud detection scheme. J. Geophys. Res. Atmos. 2014, 119, 2441–2456. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNPP | ||||
|---|---|---|---|---|
| ACSPO N | ML N | Recall (%) | Precision (%) | |
| CS_BT | 3348 | 3139 | 93.76 | 92.70 |
| PCS | 703 | 674 | 95.87 | 86.19 |
| CLOUD | 15,575 | 150,50 | 96.63 | 98.52 |
| CS_SST | 374 | 330 | 88.24 | 80.29 |
| ALL | 20,000 | 19,193 | 95.97 | 96.67 |
| ACSPO | FCDN-CSM | PCM | ALL Data | |||||
|---|---|---|---|---|---|---|---|---|
| µ | σ | µ | σ | µ | σ | µ | σ | |
| M12 | −0.1349 | 0.3479 | −0.1453 | 0.3486 | −1.3868 | 2.3835 | −11.6833 | 14.0627 |
| M13 | −0.5873 | 0.3554 | −0.5858 | 0.3581 | −1.8384 | 2.1222 | −11.4019 | 13.7826 |
| M14 | −0.7165 | 0.4499 | −0.7027 | 0.4421 | −1.6244 | 1.9611 | −12.6647 | 14.7198 |
| M15 | −0.5912 | 0.4896 | −0.5689 | 0.4778 | −1.4705 | 2.1007 | −13.4887 | 15.8929 |
| M16 | −0.7312 | 0.5756 | −0.7000 | 0.5532 | −1.4670 | 1.9744 | −13.5286 | 15.7936 |
| NCSP × 104 | 2111 | 2123 | 3862 | 12,570 | ||||
| ACSPO | FCDN-CSM | |||
|---|---|---|---|---|
| µ | σ | µ | σ | |
| M12 | −0.2412 | 0.3559 | −0.1990 | 0.3538 |
| M14 | −0.7378 | 0.4509 | −0.6120 | 0.4553 |
| M15 | −0.5676 | 0.4796 | −0.5366 | 0.4892 |
| M16 | −0.6936 | 0.5754 | −0.6773 | 0.5871 |
| NCSP × 104 | 2075 | 2017 | ||
| 8-Feature | 11-Updated-Feature | |||||
|---|---|---|---|---|---|---|
| N | Recall (%) | Precision (%) | N | Recall (%) | Precision (%) | |
| CS_BT | 2775 | 82.89 | 78.26 | 3037 | 90.71 | 91.28 |
| PCS | 677 | 96.30 | 63.99 | 676 | 96.16 | 85.35 |
| CLOUD | 14,918 | 95.78 | 95.23 | 14,957 | 96.03 | 98.14 |
| CS_SST | 247 | 66.04 | 58.67 | 291 | 77.81 | 81.74 |
| Accuracy | 18,617 | 93.09 | 89.98 | 18,961 | 94.81 | 96.18 |
| 8-Feature | 11-Updated-Feature | |||
|---|---|---|---|---|
| µ | σ | µ | σ | |
| M12 | −0.1541 | 0.3784 | −0.1393 | 0.3600 |
| M13 | −0.5605 | 0.3728 | −0.5829 | 0.3599 |
| M14 | −0.6961 | 0.5243 | −0.6950 | 0.4620 |
| M15 | −0.5486 | 0.5849 | −0.5603 | 0.4969 |
| M16 | −0.6841 | 0.6888 | −0.6898 | 0.5852 |
| NCSP × 104 | 1964 | 2083 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, X.; Liu, Q.; Yan, B.; Sun, N. A Deep Learning Trained Clear-Sky Mask Algorithm for VIIRS Radiometric Bias Assessment. Remote Sens. 2020, 12, 78. https://doi.org/10.3390/rs12010078
Liang X, Liu Q, Yan B, Sun N. A Deep Learning Trained Clear-Sky Mask Algorithm for VIIRS Radiometric Bias Assessment. Remote Sensing. 2020; 12(1):78. https://doi.org/10.3390/rs12010078
Chicago/Turabian StyleLiang, Xingming, Quanhua Liu, Banghua Yan, and Ninghai Sun. 2020. "A Deep Learning Trained Clear-Sky Mask Algorithm for VIIRS Radiometric Bias Assessment" Remote Sensing 12, no. 1: 78. https://doi.org/10.3390/rs12010078
APA StyleLiang, X., Liu, Q., Yan, B., & Sun, N. (2020). A Deep Learning Trained Clear-Sky Mask Algorithm for VIIRS Radiometric Bias Assessment. Remote Sensing, 12(1), 78. https://doi.org/10.3390/rs12010078