1. Introduction
Bistatic synthetic aperture radar (BSAR), whose transmitter and receiver are located on different platforms, has attracted much attention in recent years. BSAR has advantages of stealthy and flexible configuration, which can help it to detect and monitor moving targets in the complex electromagnetic environment. In particular, for the BSAR system with existing spaceborne transmitter and airborne receiver, only the receiving equipment is needed to be deployed that significantly reduces the cost and the spaceborne SAR with high orbit can provide a wide monitoring scope. Several successful experiments on spaceborne-airborne BSAR (SA-BSAR) had been carried out by NASA’s Jet Propulsion Laboratory (JPL) in 1984 [
1] and by the German Aerospace Center (DLR) and the Research Establishment for Applied Science (FGAN) from 2007 to 2009 [
2,
3,
4,
5,
6,
7], respectively. These experiments constrained the satellite and the airplane to fly along parallel flight paths and achieved the stationary scenes imaging. This means that the basic and core problems for SA-BSAR system can be solved, such as the beam, time and phase synchronization [
2,
8], platform motion compensation [
3], imaging algorithm [
4,
5,
6,
7], etc. It is also indicated that we can take the advantages of SA-BSAR system to apply it to the moving target indication (MTI).
Low earth orbit SA-BSAR (LEO SA-BSAR) system, whose major mission is for stationary scenes imaging, is hard to measure slow velocity for its clutter spectrum broadening seriously. However, with the significant increase of transmitter’s orbital altitude, the ground speed of geosynchronous SA-BSAR (GEO SA-BSAR) reduces [
9]. Thus, it can provide stable coverage area or a long time for airborne receiver. In addition, GEO SA-BSAR also has the advantages of larger coverage and shorter revisit time compared with LEO SAR case [
10,
11], which benefits MTI. At present, the research on GEO SAR has attracted much attention and involves in all aspects, including system design and optimization [
12,
13,
14], resolution analysis [
15,
16], accurate imaging algorithm [
17,
18], deformation retrieval [
19] and MTI [
20,
21,
22], which prompts the development of GEO SA-BSAR MTI system.
In order to monitor moving target in a particular area, GEO SA-BSAR MTI system determines the system operating time according to the ephemeris, attitude and antenna beam direction of GEO SAR to ensure the area can always be illuminated during the synthetic aperture time. Then, the airborne multi-channel receiver can obtain and process the echoes to detect the moving targets. Considering the beam of GEO SAR covers thousands of kilometers and the airplane’s flight path can be designed in advance, the configuration of GEO SA-BSAR MTI system is flexible, leading to different MTI performance.
As early as 1997, the system with geosynchronous illumination and bistatic reception was first proposed for large coverage monitoring and MTI [
23]. It only analyzed the feasibility of MTI based on the system parameters without considering the configuration design and data processing. Subsequently, the research of GEO SA-BSAR focuses on imaging characteristics, resolution, bistatic configuration and imaging algorithm for stationary scenes [
24,
25,
26,
27,
28,
29,
30]. Literature [
26] analyzed the imaging performance of GEO SA-BSAR system under different bistatic configuration, based on which the bistatic configuration for GEO SA-BSAR imaging system was obtained to make the imaging performance indicators approach to the given values as far as possible. However, the configuration for MTI is not considered, causing the poor MTI performance if the configuration for imaging stationary scenes is employed directly.
In addition, the research on GEO SA-BSAR MTI system mainly focuses on the geostationary SA-BSAR. The MTI processing of geostationary SA-BSAR has been studied in literature [
31], in which two airborne side-looking radars with different carrier frequencies, antenna spacings or velocities were adopted to solve the azimuth ambiguity problem. However, there are few studies on non-geostationary SA-BSAR MTI system.
Without changing the equipment, good MTI performance and SAR imaging performance can be achieved at the same time only by changing the bistatic configuration. The key to determine the system configuration is to obtain the relationship between the performance indicators and configuration parameters, which was not involved in previous studies. Then, the configuration design problem is modeled as an optimization problem of MTI performance and SAR imaging performance. Therefore, this paper proposes a configuration design method of GEO SA-BSAR MTI system to achieve the optimal MTI performance while ensuring good SAR imaging performance. The main contributions of this paper are twofold. First, the relationship between the MTI performance and bistatic configuration parameters has been analyzed theoretically. Second, it obtain the bistatic configuration that ensures GEO SA-BSAR system has the best performance of MTI while imaging stationary scene, which extends the function of GEO SA-BSAR system. This has been added in the text.
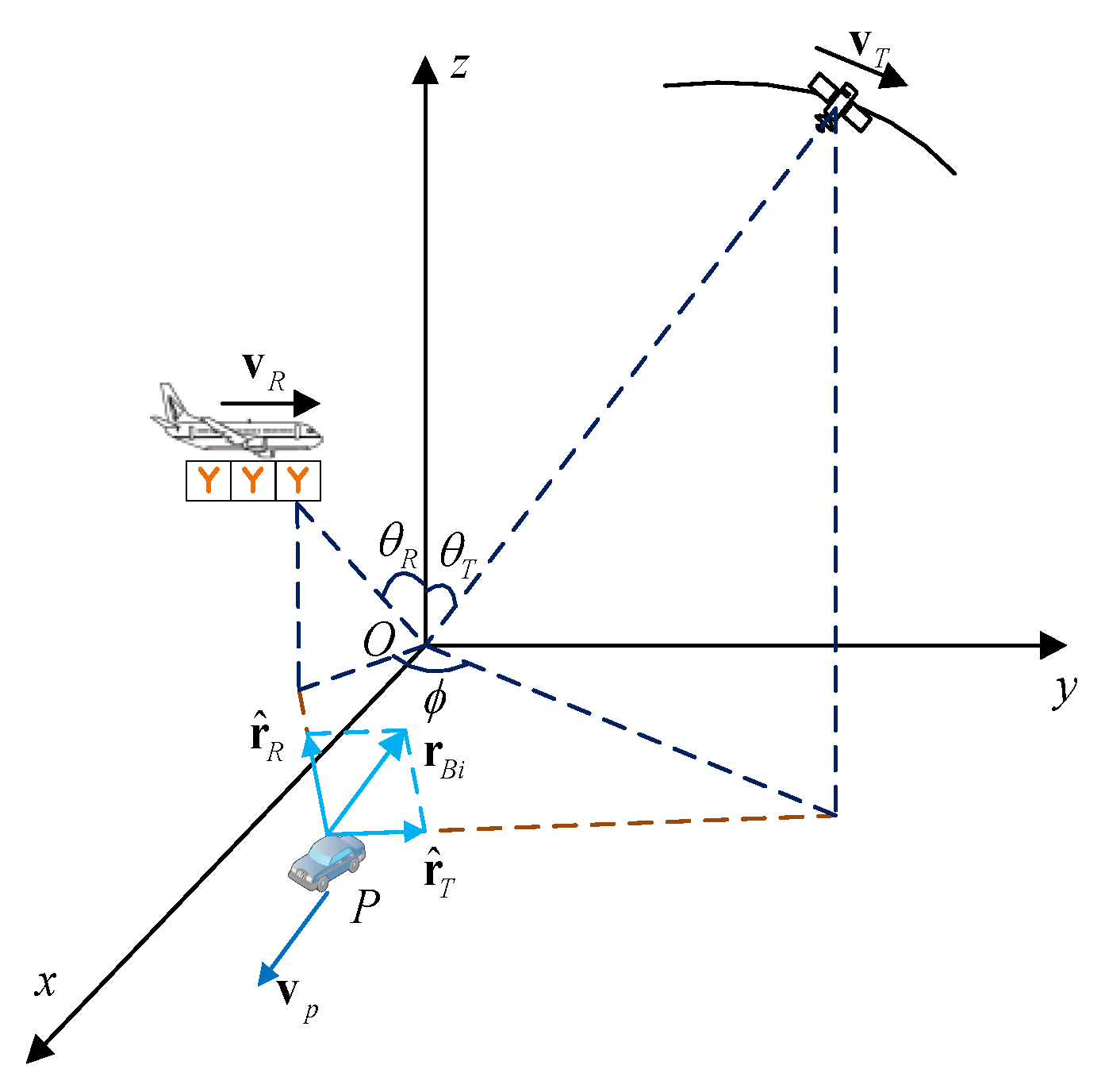
In this paper, the observation geometry and special issues of the bistatic configuration for GEO SA-BSAR MTI system are introduced in
Section 2. Next, in
Section 3, the performance of GEO SA-BSAR MTI system is first investigated under the arbitrary bistatic configuration. The performance indicator of MTI system includes signal to clutter and noise ratio (SCNR) loss and Cramer–Rao lower bounds (CRLB). Based on optimal output SCNR criterion, the analytical expressions of minimum detectable velocity (MDV), the maximum unambiguous velocity (MUV) in terms of configuration parameters can be obtained. Moreover, the theoretical variance of parameter estimation is deduced based on CRLB. Then, according to the relationship between MTI performance and configuration parameters and SAR imaging performance requirements,
Section 4 models the configuration design problem as a multi-objective optimization problem containing constraint conditions. Considering the objective functions are more than three, the constraint non-dominated sorting evolutionary algorithm III is used to optimize bistatic configuration and more than one solution can be obtained at the same time. The best bistatic configuration of GEO SA-BSAR MTI system can be selected from the solutions to guide aircraft flight track. In
Section 5 the optimal configuration of GEO SA-BSAR MTI system is obtained through simulation, and the performance of the system is also verified by simulation. Finally, the conclusion is given.
4. Optimal Configuration Design for GEO SA-BSAR MTI System
By designing the bistatic configuration of GEO SA-BSAR MTI system, the optimal MTI performance is achieved while meeting the requirements of the imaging performance. As mentioned above, the MTI performance includes MDV, MUV, velocity accuracy and location accuracy. It is obvious that the optimal MTI performance means the minimum MDV, the maximum MUV the minimum velocity and location accuracy. However, it can be seen from Equations (24) and (26) that a small MDV also leads to a small MUV. That means the MDV and MUV are unable to be optimal at the same time. Therefore, we can forecast the velocity range of the area to be monitored and make the MUV greater than the upper bound of the velocity. Then, the MDV, the velocity and location accuracy are minimized.
In addition, the imaging performance of GEO SA-BSAR MTI system must also be good. The traditional GEO SA-BSAR imaging geometry is designed to satisfy the given imaging performance indicators as much as possible. However, for the GEO SA-BSAR MTI system, we only need to ensure that we can obtain a clear SAR image. To achieve a clear SAR image, the range and azimuth resolution should be appropriate, the resolution direction angle should be 90° and the SNR of a clear SAR image should be at least greater than 5 dB. Therefore, we only limit the upper bound of range and azimuth resolution. In addition, the resolution direction angle is limited to be as close as possible to 90° and the CNR is at least greater than 5 dB.
Based on the MTI and imaging performance requirements of the GEO SA-BSAR MTI system mentioned above, it is assumed that the tolerable minimum MUV is
, the upper limit of range resolution is
, the upper limit of azimuth resolution is
and the tolerable error between the resolution direction angle and 90° is
. Thus, the function to be optimized is:
where
. The value range is:
The value of is determined according to the observation area and can be set as the upper limit of moving targets’ velocity in the scene. For example, when monitoring the urban roads, is selected as , which has almost covered the velocities of vehicles in urban areas. Then, can be determined according to the synthetic aperture time. In general, the synthetic aperture time of 10 s can achieve 3 m azimuthal resolution in GEO SA-BSAR system and can be 3 m. Next, cannot be too different from . Both and are related to , therefore should satisfy . Finally, can be 0.1 rad.
In order to solve the multi-objective optimization problem shown in (44), we adopted the constrained non-dominant sorting genetic algorithm III (NSGA-III) [
41]. The common genetic algorithms to solve optimization problems, such as NSGA II and SPEA2, have good performance when solving the problem with two or less objective functions, but are easy to get local optimal solution for three or more objective functions. NSGA-III is developed from NSGA II and can solve the optimization problem with three or more objective functions. NSGA III first randomly generates
variables as the initial parent population. Then, by genetic operation, the current parent population is used to create offspring population. The combined population of parent population and offspring population is processed the non-dominant sorting and divided into different levels. The next generation is selected from the combined population according to the level and the reference points to ensure the diversity of population. Finally, the solution can be obtained after multiple iterations. The NSGA III algorithm can obtain multiple non-dominant solutions at once, and can well solve the non-convex optimization problem shown in Equation (44).
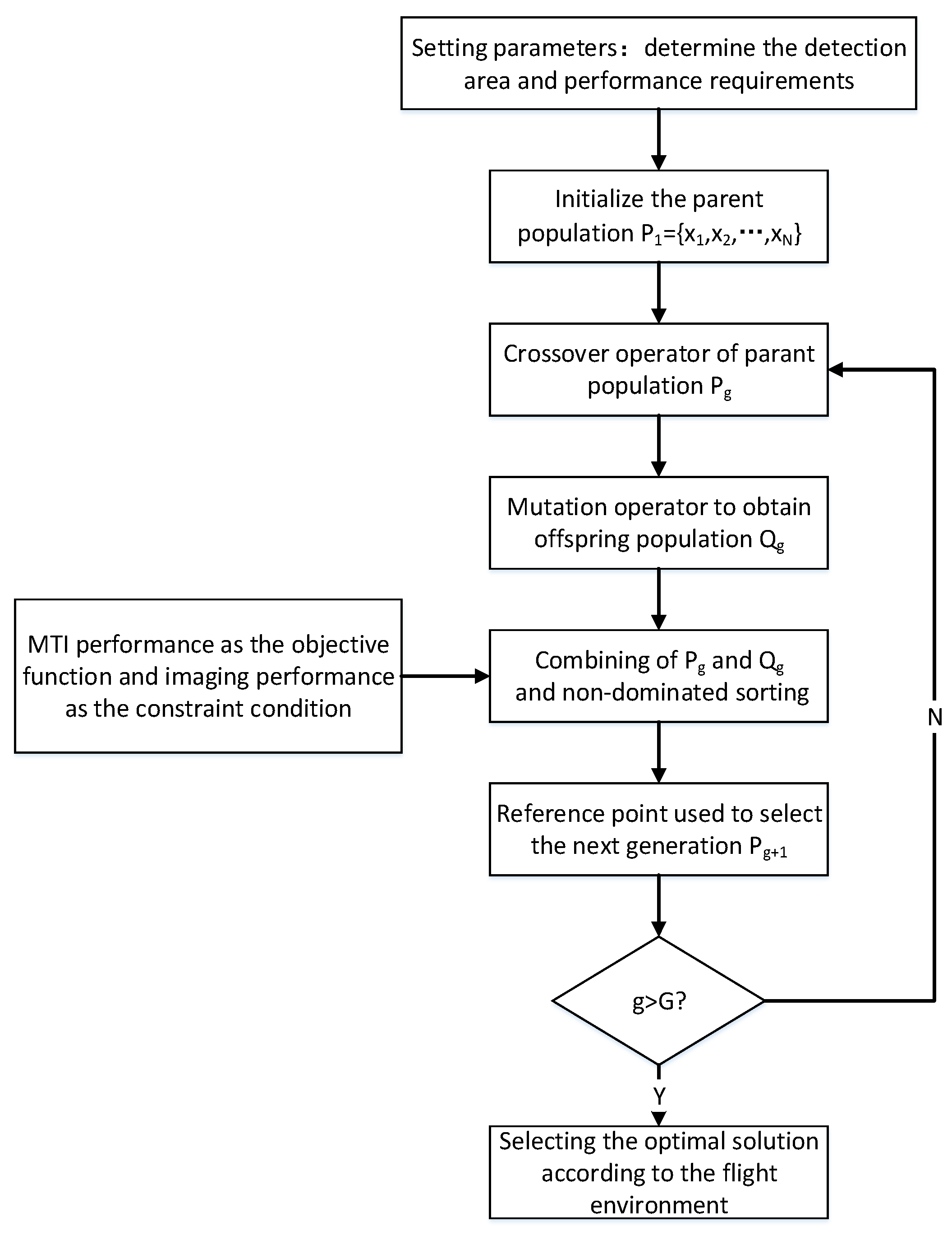
Based on constrained NSGA III algorithm, the specific steps of GEO SA-BSAR MTI system configuration design method are as follows (the flow chart is shown in
Figure 2):
Step 1: setting parameters. According to the chosen observation area, the GEO SAR’s trajectory is determined by ephemeris, which guarantee the region can always be illuminated by GEO SAR during the synthetic aperture time. Then, MTI and imaging performance requirements are given. The minimum MUV that can be tolerated is , the upper limit of range resolution is , the upper limit of azimuth resolution is and the maximum error of resolution direction angle is .
Step 2: initialize the parent population. The initial population composed of individuals is generated randomly within the range of variable .
Step 3: conducting the NSGA III algorithm until the number of iterations reaches the number of genetic .
Step 3.1: for the -th generation, the obtained parent population is . In , two individuals are randomly selected. Then, the crossover operator is used to simulate the two-point crossover, and the mutation operator is executed under a certain probability to obtain the offspring individuals. Finally, the offspring population containing individuals is obtained.
Step 3.2: combine the parent population and offspring population to obtain population . The objective function value of every individual in the population is computed by Equation (44). The optimization indicators including the MDV, velocity and location accuracy, as well as the constraint conditions including range resolution, azimuth resolution, resolution direction angle and MUV. The solutions satisfy the constraint conditions as the feasible solution, while the dissatisfied solution as the infeasible solution. Based on the non-dominated sorting, the feasible solution can be divided into several different levels . The infeasible solutions that are ordered according to the error that does not meet the constraint conditions, is arranged after the feasible solutions.
Step 3.3: add the solutions of each levels to the in order until the number of individuals in exceeds for the first time. If the last level added into is , and the number of individuals in causes the number of individuals in to exceed . Then, based on the method of reference point, each individual in the group is associated with the reference point. The individual nearest to the reference point is selected or randomly selected into . Finally, the next generation of parent population with individuals is obtained.
Step 4: select the optimal solution. After the -th iteration, the non-dominant solution set was selected as the optimal solution set from the population . Finally, according to the flight environment, the most suitable solution was selected as the bistatic configuration of the real GEO SA-BSAR MTI system.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}