Analysis of UAS Flight Altitude and Ground Control Point Parameters on DEM Accuracy along a Complex, Developed Coastline


Abstract
:
1. Introduction
1.1. Background
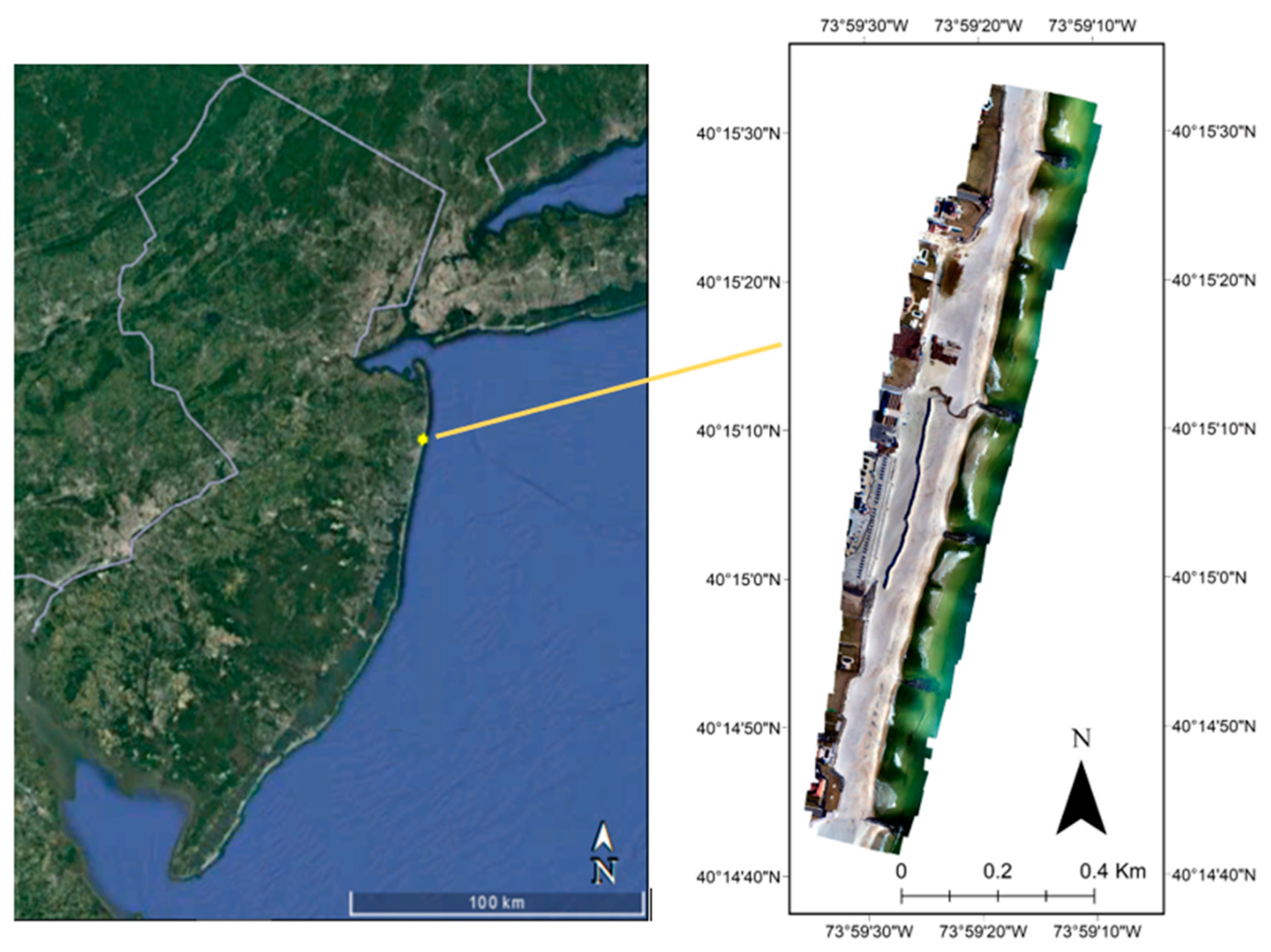
1.2. Site Description
2. Materials and Methods
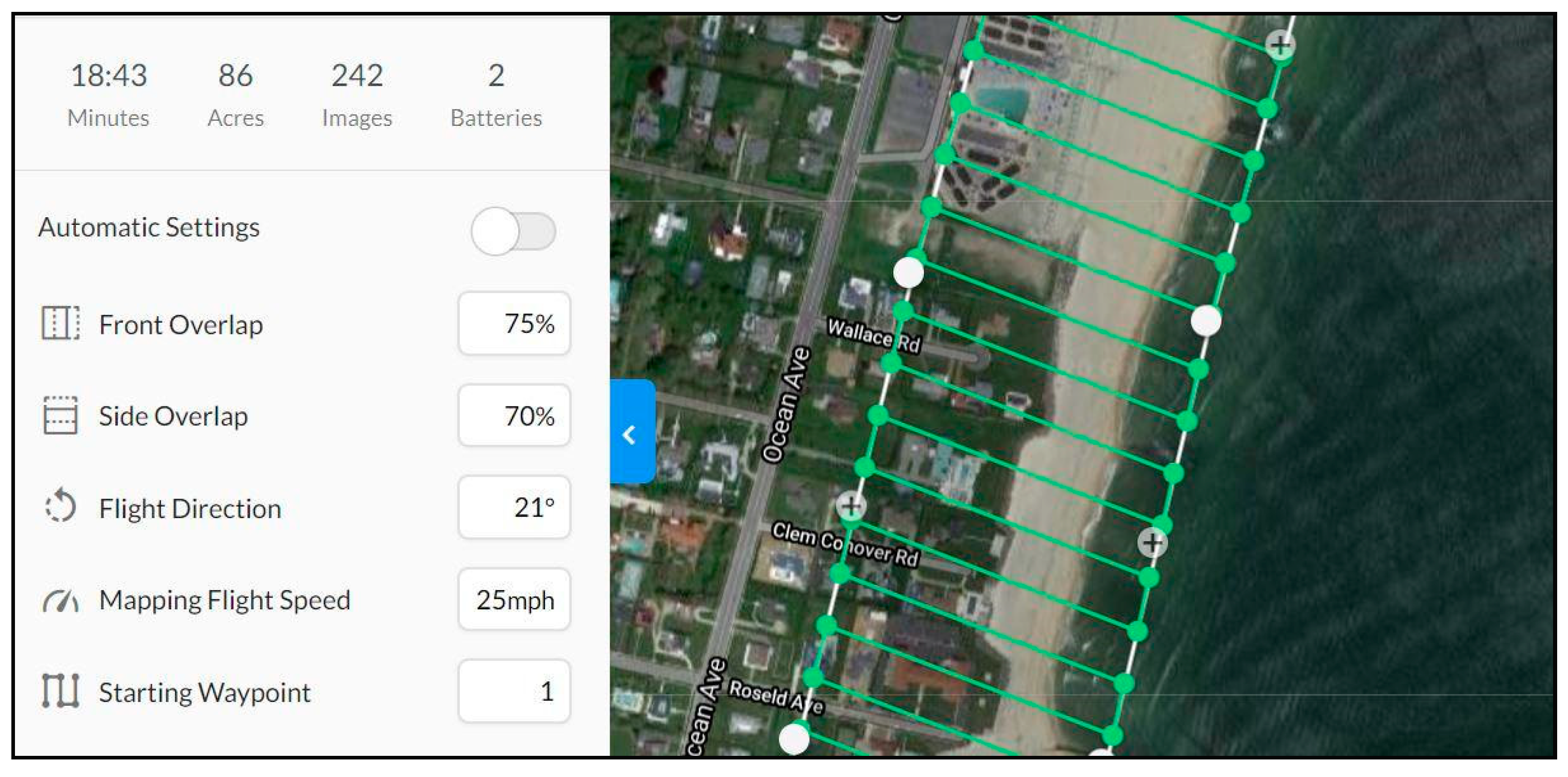
2.1. Equiptment and Survey Setup
2.2. Structure from Motion (SfM) Technique
3. Results
3.1. UAS Flight Altitude
- H is the flight altitude (67, 91, 116 m)
- Sh is sensor height (=8 mm for DJI Phantom 4 pro)
- Sw is sensor width (=13.2 mm)
- c is the focal length of the camera (=8.8 mm)
- Ih is image height (=3648 pixels)
- Iw is image width (=4864 pixels)
- GSD is the ground sampling distance (cm/pixel)
- X, Y, ZGPS,i are the X, Y, and Z coordinates of the ith GCP measured with RTK-GPS
- X, Y, ZUAS,i are the X, Y, and Z coordinates of the ith GCP as from the identification in the images
- n is the total number of GCPs, or check points used for the comparison
3.2. Ground Control
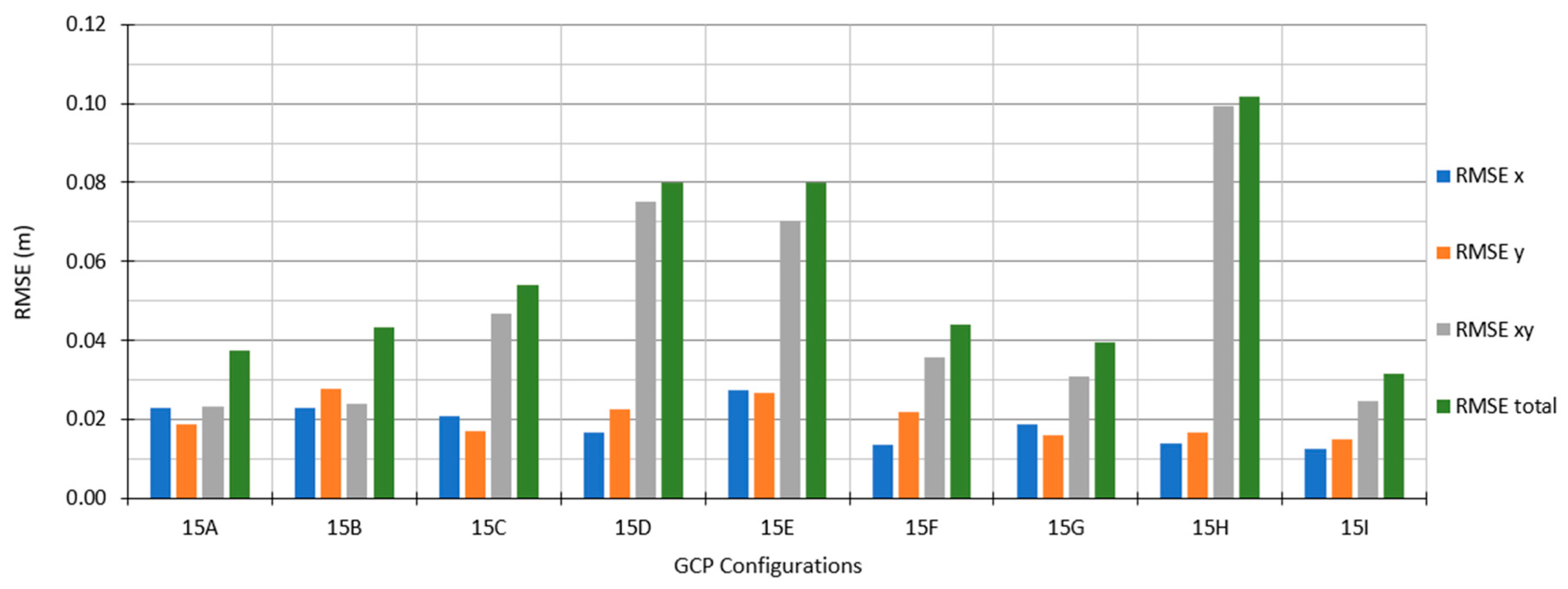
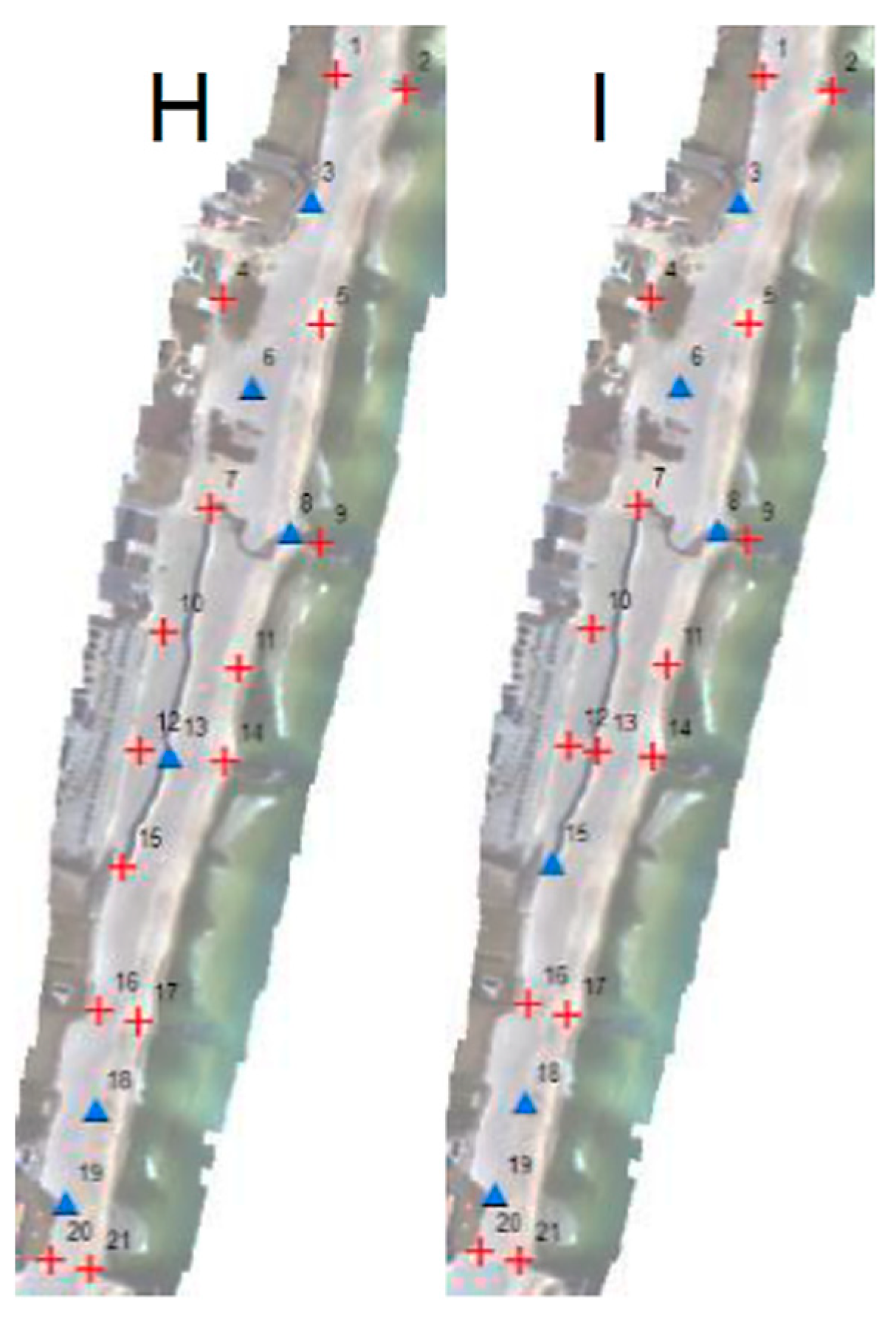
3.2.1. Configuration of Ground Control Points
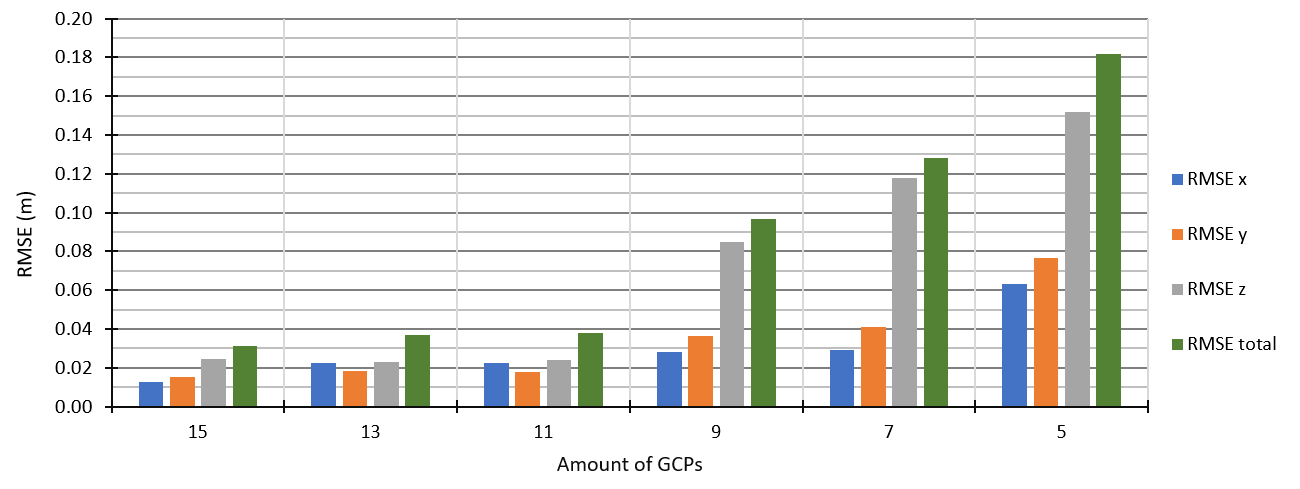
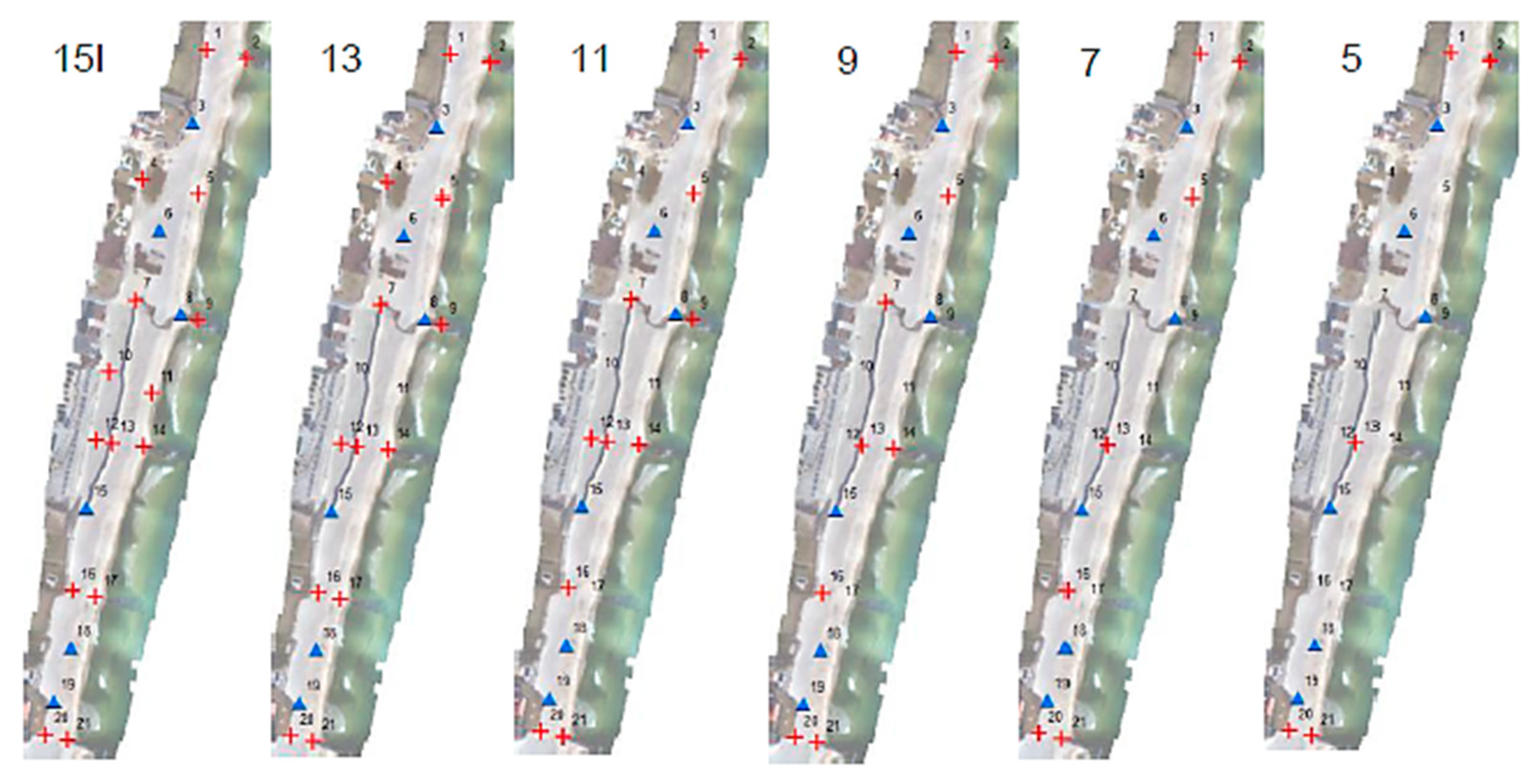
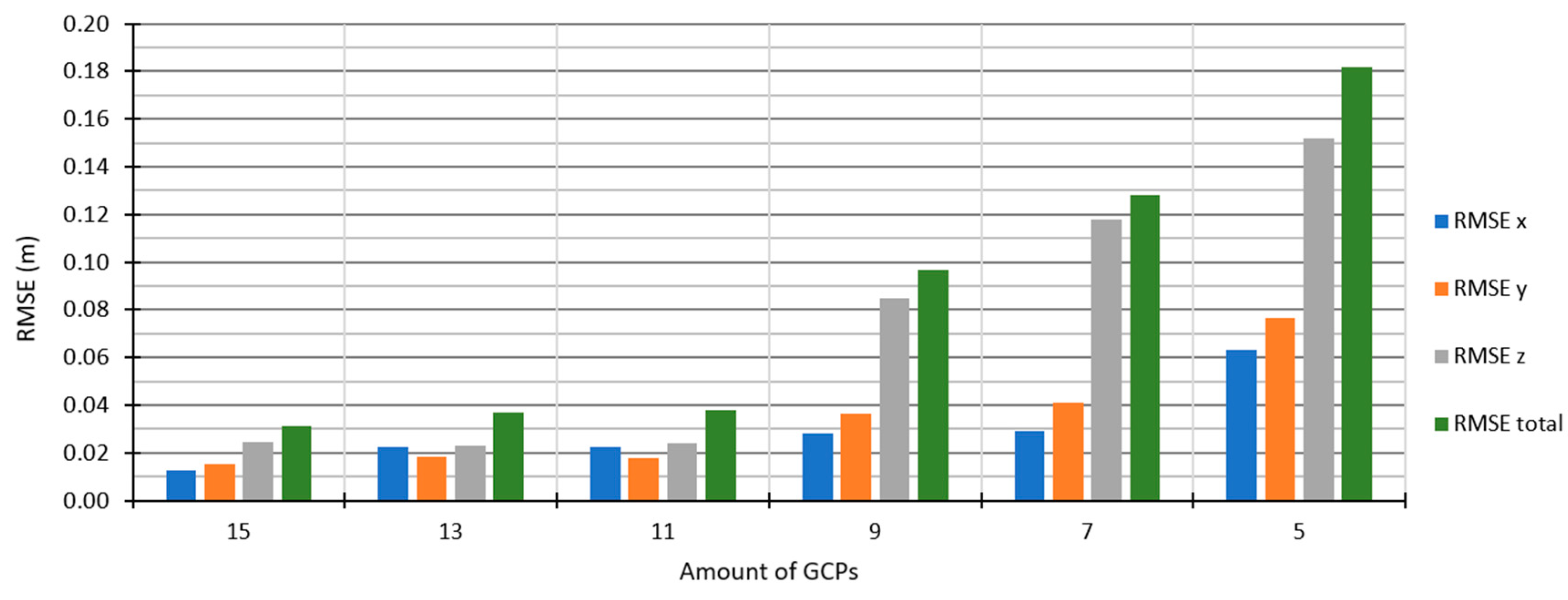
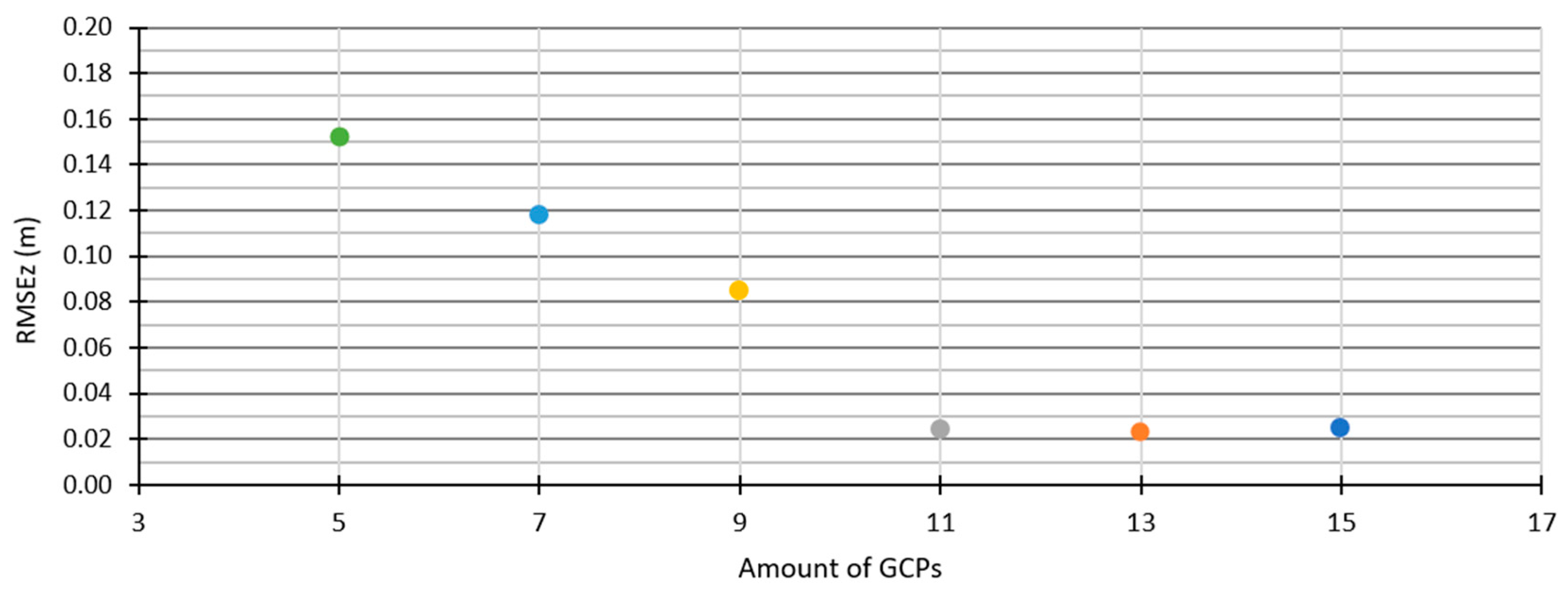
3.2.2. Amount of Ground Control Points
4. Discussion
5. Conclusions
- The survey boundary should exceed the area of interest to ensure sufficient image overlap, guarantee GCPs are well-within survey area, and to account for potential influence of tidal range.
- The highest flight altitude (116 m) resulted in the most accurate DEM (likely because each image covered the most surface area, allowing for more common features to be recognized in multiple images).
- GCP configuration is critical, with optimal placement covering all four corners of the site, the highest and lowest elevations, and with sufficient cross-shore and alongshore coverage.
- More GCPs do not always translate to better data; using less well-placed GCPs can yield more accurate results than using more poorly placed GCPs (likely related to spatial overfitting of the data) [25].
Author Contributions
Funding
Conflicts of Interest
References
- Theuerkauf, E.J.; Rodriguez, A.B. Impacts of Transect Location and Variations in Along-Beach Morphology on Measuring Volume Change. J. Coast. Res. 2012, 28, 707–718. [Google Scholar]
- Mason, D.; Gurney, C.; Kennett, M. Beach Topography Mapping—A Comparison of Techniques. J. Coast. Conserv. 2000, 6, 113–124. [Google Scholar] [CrossRef]
- Lee, J.M.; Park, J.Y.; Choi, J.Y. Evaluation of Sub-aerial Topographic Surveying Techniques Using Total Station and RTK-GPS for Applications in Macrotidal Sand Beach Environment. J. Coast. Res. 2013, 65, 535–540. [Google Scholar] [CrossRef]
- Terefenko, P.; Wziatek, D.Z.; Dalyot, S.; Boski, T.; Lima-Filho, F.P. A High-Precision LiDAR-Based Method for Surveying and Classifying Coastal Notches. ISPRS Int. J. Geo-Inf. 2018, 7, 295. [Google Scholar] [CrossRef] [Green Version]
- Spore, N.J.; Renaud, A.D.; Conery, I.W.; Brodie, K.L. Coastal Lidar and Radar Imaging System (CLARIS) Lidar Data Report: 2011–2017; ERDC/CHL SR-19-4; Engineer Research and Development Center Vicksburg Ms Vicksburg: Vicksburg, MS, USA, 2019; pp. 4–7. [Google Scholar]
- Papakonstantinou, A.; Topouzelis, K.; Pavlogeorgatos, G. Coastline Zone Identification and 3D Coastal Mapping Using UAV Spatial Data. ISPRS Int. J. Geo-Inf. 2016, 5, 75. [Google Scholar] [CrossRef] [Green Version]
- Jansen, M.K. Analysis of Photogrammetric Mapping Using Low-Cost Unmanned Aerial Vehicles in Coastal Areas. Master’ Thesis, Stevens Institute of Technology, Hoboken, NJ, USA, 2 May 2018. [Google Scholar]
- Spore, N.J.; Brodie, K.L. Collection, Processing, and Accuracy of Mobile Terrestrial Lidar Survey Data in the Coastal Environment; ERDC/CHLH TR-17-5; Field Research Facility, US Army Engineer Research and Development Center: Kitty Hawk, NC, USA, 2018; pp. 1–29. [Google Scholar]
- Basco, D.R.; Pope, J. Groin Functional Design Guidance from the Coastal Engineering Manual. J. Coast. Res. 2004, 33, 121–130. [Google Scholar]
- FACT SHEET—Sea Bright to Manasquan, NJ Coastal Storm Risk Management and Erosion Control Project. Available online: https://www.nan.usace.army.mil/Media/Fact-Sheets/Fact-Sheet-Article-View/Article/487661/sea-bright-to-manasquan-nj-beach/ (accessed on 5 March 2020).
- Sandy Hook to Barnegat Inlet, NJ. Available online: https://www.nan.usace.army.mil/Missions/Civil-Works/Projects-in-New-Jersey/Sandy-Hook-to-Barnegat-Inlet/ (accessed on 5 July 2020).
- Phantom 4 Specs. Available online: https://www.dji.com/phantom-4 (accessed on 5 March 2020).
- Commercial Operations Branch Part 107 UAS Operations. Available online: https://www.faa.gov/about/office_org/headquarters_offices/avs/offices/afx/afs/afs800/afs820/part107_oper/ (accessed on 5 March 2020).
- Structure from Motion Introductory Guide. Available online: https://www.unavco.org/education/resources/modules-and-activities/field-geodesy/module-materials/sfm-intro-guide.pdf (accessed on 1 March 2020).
- James, M.; Robson, S.; Smith, M. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Process. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Georeferencing. Available online: https://serc.carleton.edu/research_education/geopad/georeferencing.html (accessed on 29 April 2020).
- Ground Control Points. Available online: https://support.dronedeploy.com/docs/working-gcp-step-by-step (accessed on 29 April 2020).
- Agisoft Metashape User Manual. Available online: https://www.agisoft.com/pdf/metashape-pro_1_5_en.pdf (accessed on 25 April 2020).
- Tahar, K.N. An Evaluation on Different Number of Ground Control Points in Unmanned Aerial Vehicle Photogrammetric Block. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-2/W2, 93–98. [Google Scholar] [CrossRef] [Green Version]
- Brunier, G.; Fleury, J.; Anthony, E.J.; Gardel, A.; Dussouillez, P. Close-range airborne Structure-from-Motion Photogrammetry for high-resolution beach morphometric surveys: Examples from an embayed rotating beach. Geomorphology 2016, 261, 76–88. [Google Scholar] [CrossRef]
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; Aardt, J.; Kunneke, A.; Seifert, T. Influence of Drone Altitude, Image Overlap, and Optical Sensor Resolution on Multi-View Reconstruction of Forest Images. Remote Sens. 2019, 11, 1252. [Google Scholar] [CrossRef] [Green Version]
- Pix4D Documentation Ground Sampling Distance. Available online: https://support.pix4d.com/hc/en-us/articles/202559809-Ground-sampling-distance-GSD (accessed on 5 March 2020).
- Pix4D Documentation Difference between a Ground Control Point and a Check Point. Available online: https://support.pix4d.com/hc/en-us/articles/115000140963-Difference-between-a-ground-control-point-and-a-checkpoint (accessed on 5 March 2020).
- Jayaratne, M.P.; Rahman, M.; Shibayama, T. A Cross-Shore Beach Profile Evaluation Model. Coast. Eng. J. 2015, 56, 40. [Google Scholar]
- Rizeei, H.M.; Pradhan, B. Urban Mapping Accuracy Enhancement in High-Rise Built-Up Areas Deployed by 3D-Orthorectification Correction from WorldView-3 and LiDAR Imageries. Remote Sens. 2019, 11, 692. [Google Scholar] [CrossRef] [Green Version]
- Colini, L.; Doumaz, F.; Buongiorno, M.F.; Neri, M.; Mazzarini, F. Generation of high resolution Digital Elevation Models using Remote Sensing optical stereo data: Application to Mount Etna test site, Italy. In Geophysical Research Abstracts, Proceedings of the European Geosciences Union, Vienna, Austria, 2–7 April 2006; European Geosciences Union: Munich, Germany, 2006; Volume 8, p. 07583. [Google Scholar]
- Štroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the Georeferencing Accuracy of a Photogrammetric Model Using a Quadrocopter with Onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar] [CrossRef] [PubMed] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Collection System | Cost | Time of Survey | Point Density (points/m3) | Accuracy (meters) |
|---|---|---|---|---|
| Quadcopter UAS | $1000 | Low | ≃50–100 | ≃0.03 |
| RTK GPS Backpack | ≃$15,000 | High | ≃1–2 | ≃0.05 |
| RTK GPS Spot Measurement | ≃$15,000 | Very high | ≃0.20–1 | ≃0.02 |
| Terrestrial LiDAR | ≃$50,000 | High | ≃100–1000 | ≃0.012 |
| Airborne LiDAR | ≃$100,000 | High | ≃1–10 | ≃0.15 |
| Flight Altitude (m) | Flight Duration (hh:mm:ss) | Batteries Used | Total Number of Images | Ground Sampling Distance (GSD) (cm) | Agisoft Photoscan Processing Time (hh:mm:ss) |
|---|---|---|---|---|---|
| 67 | 00:54:00 | 3 | 871 | 1.67 | 8:40:01 |
| 91 | 00:38:00 | 2 | 486 | 2.27 | 4:47:07 |
| 116 | 00:28:00 | 1 | 317 | 2.89 | 3:00:23 |
| Flight Altitude (m) | Amount of GCPs | Bias (m) | Standard Deviation (m) | RMSEZ (m) |
|---|---|---|---|---|
| 67 | 21 | −0.129 | 0.0549 | 0.140 |
| 15 | −0.124 | 0.0576 | 0.137 | |
| 91 | 21 | −0.130 | 0.0512 | 0.139 |
| 15 | −0.127 | 0.0549 | 0.139 | |
| 116 | 21 | −0.138 | 0.0497 | 0.147 |
| 15 | −0.134 | 0.0509 | 0.143 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zimmerman, T.; Jansen, K.; Miller, J. Analysis of UAS Flight Altitude and Ground Control Point Parameters on DEM Accuracy along a Complex, Developed Coastline. Remote Sens. 2020, 12, 2305. https://doi.org/10.3390/rs12142305
Zimmerman T, Jansen K, Miller J. Analysis of UAS Flight Altitude and Ground Control Point Parameters on DEM Accuracy along a Complex, Developed Coastline. Remote Sensing. 2020; 12(14):2305. https://doi.org/10.3390/rs12142305
Chicago/Turabian StyleZimmerman, Taylor, Karine Jansen, and Jon Miller. 2020. "Analysis of UAS Flight Altitude and Ground Control Point Parameters on DEM Accuracy along a Complex, Developed Coastline" Remote Sensing 12, no. 14: 2305. https://doi.org/10.3390/rs12142305
APA StyleZimmerman, T., Jansen, K., & Miller, J. (2020). Analysis of UAS Flight Altitude and Ground Control Point Parameters on DEM Accuracy along a Complex, Developed Coastline. Remote Sensing, 12(14), 2305. https://doi.org/10.3390/rs12142305