Ka-Band Doppler Scatterometry over a Loop Current Eddy

 , , , , ,
, , , , ,
Abstract
:1. Introduction
2. Experiment Description
2.1. The DopplerScatt Instrument
2.2. The ROCIS Instrument
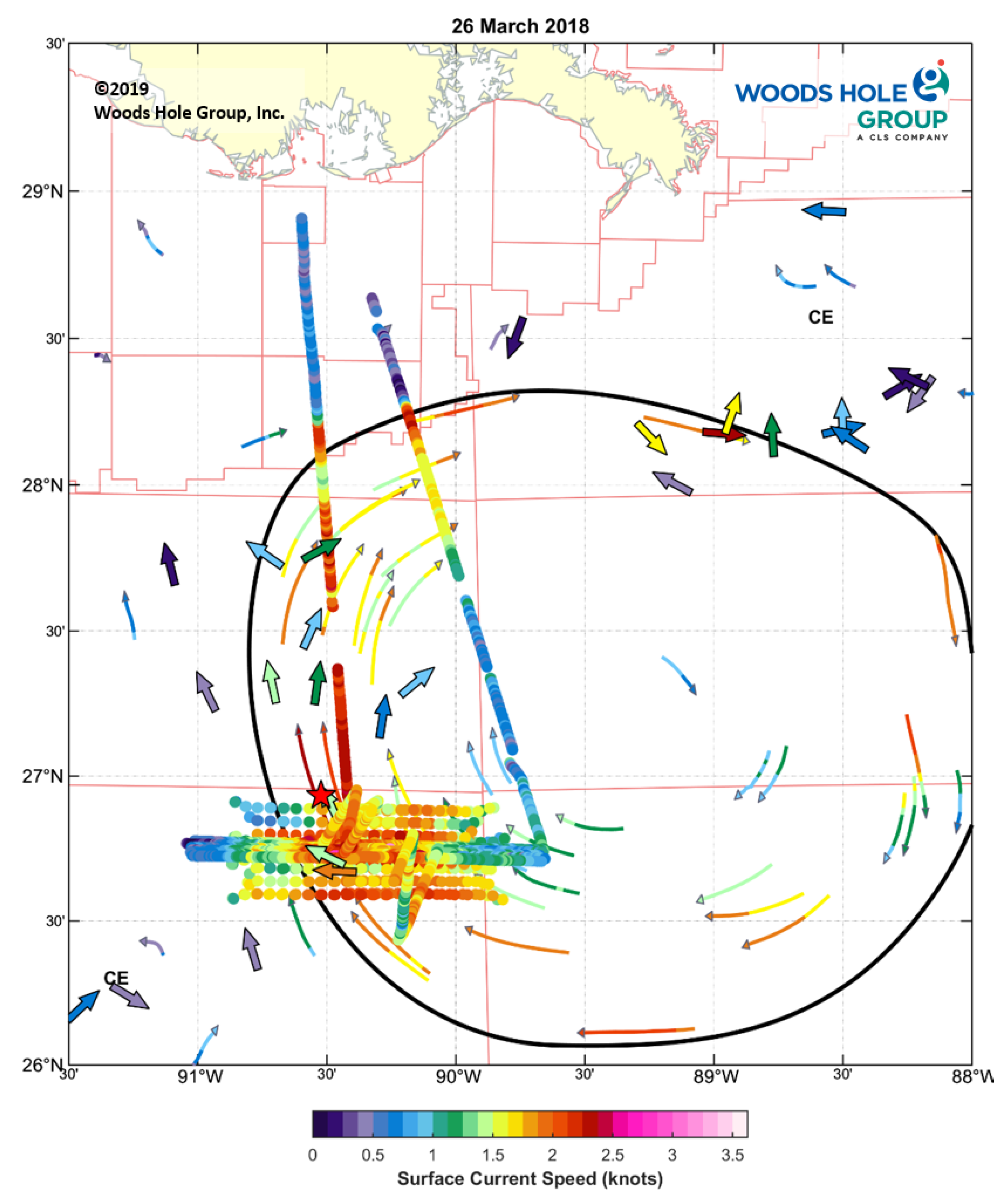
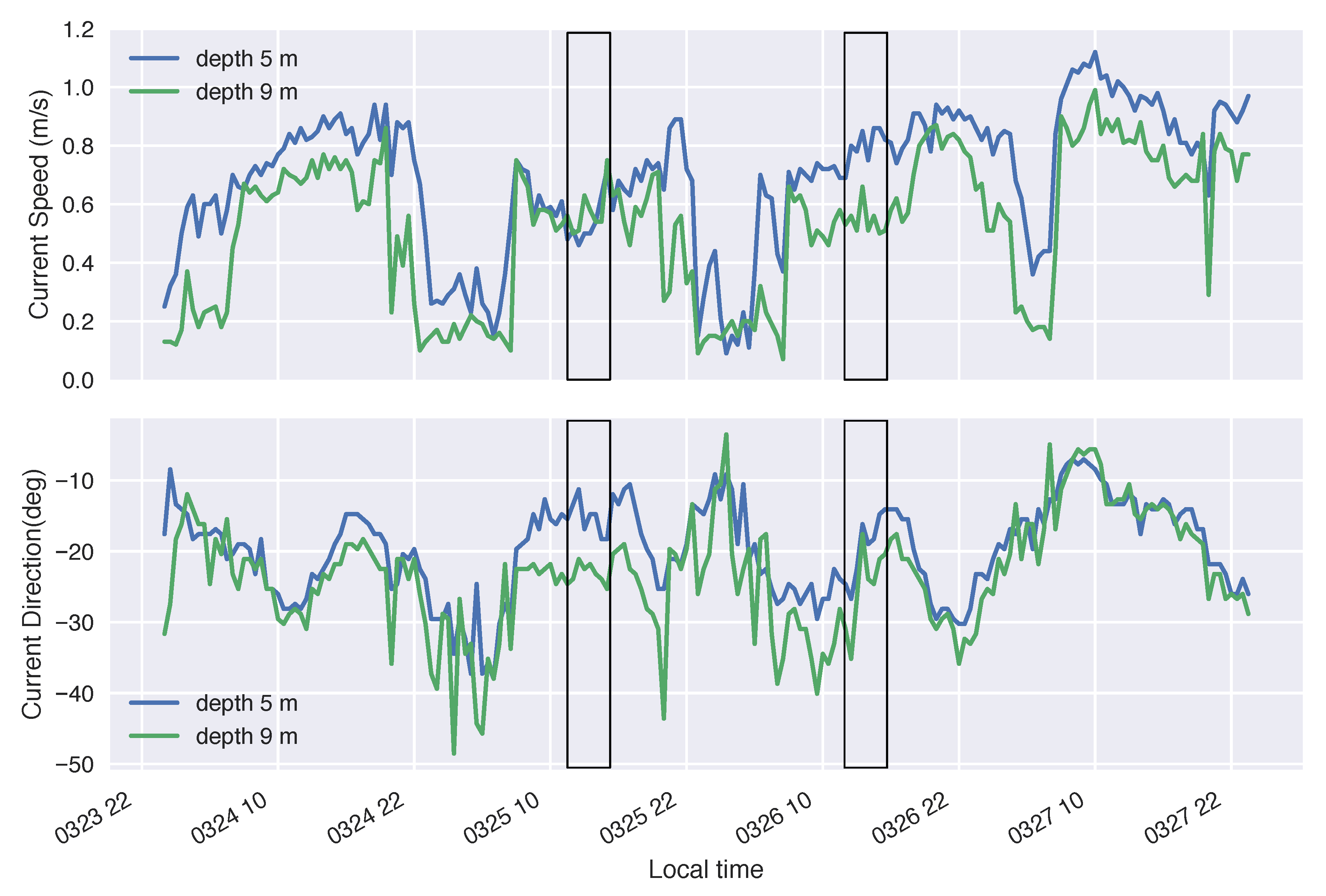
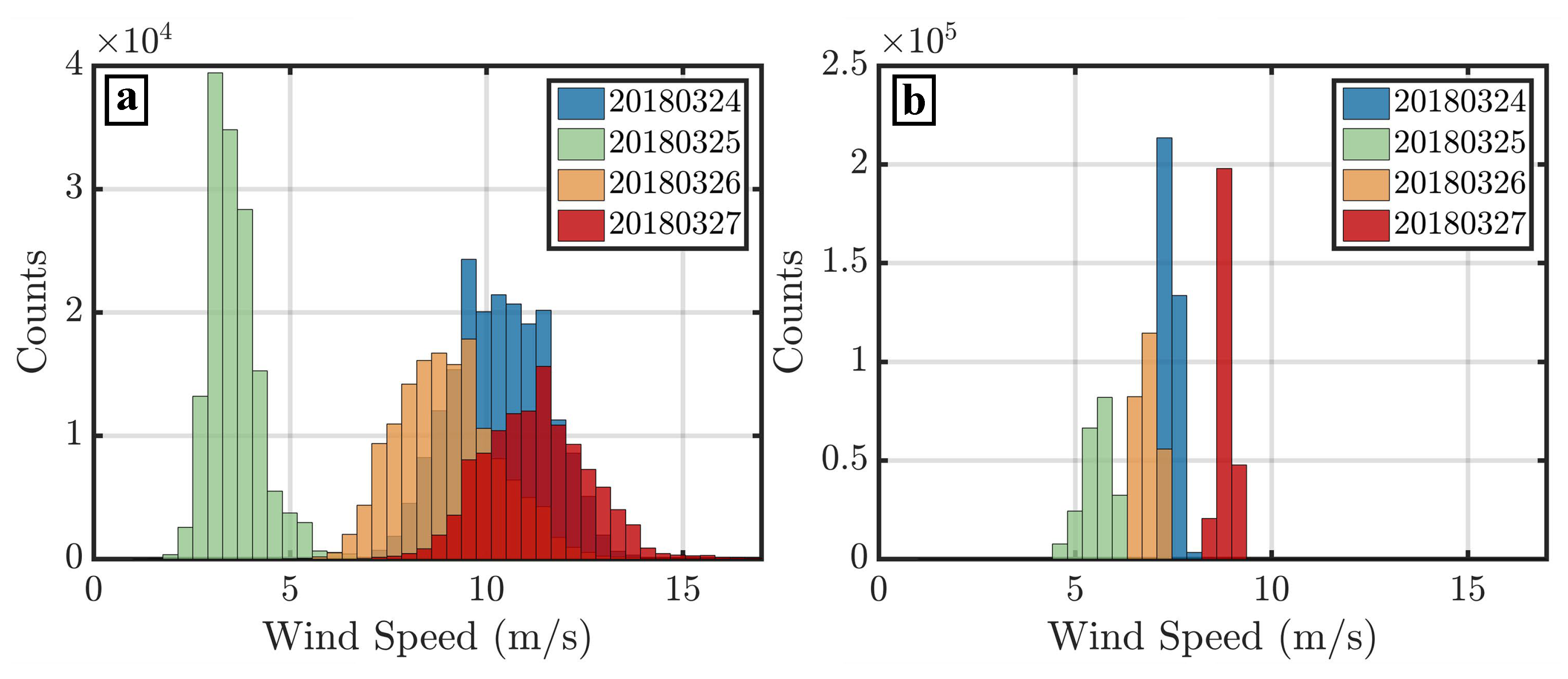
2.3. Experiment Site and Environmental Conditions
3. Results
3.1. Wind Estimation Results
3.1.1. Wind Processing
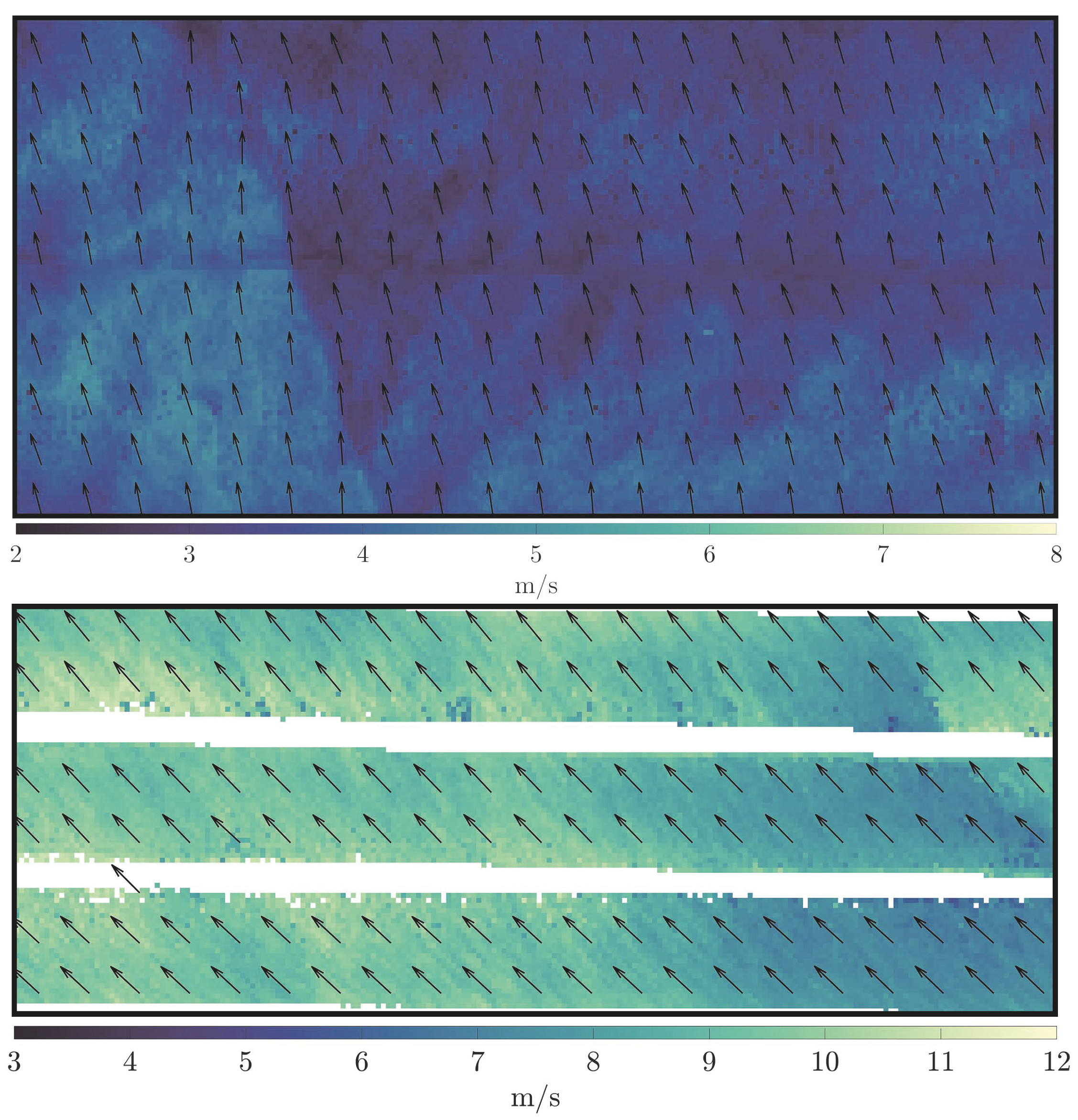
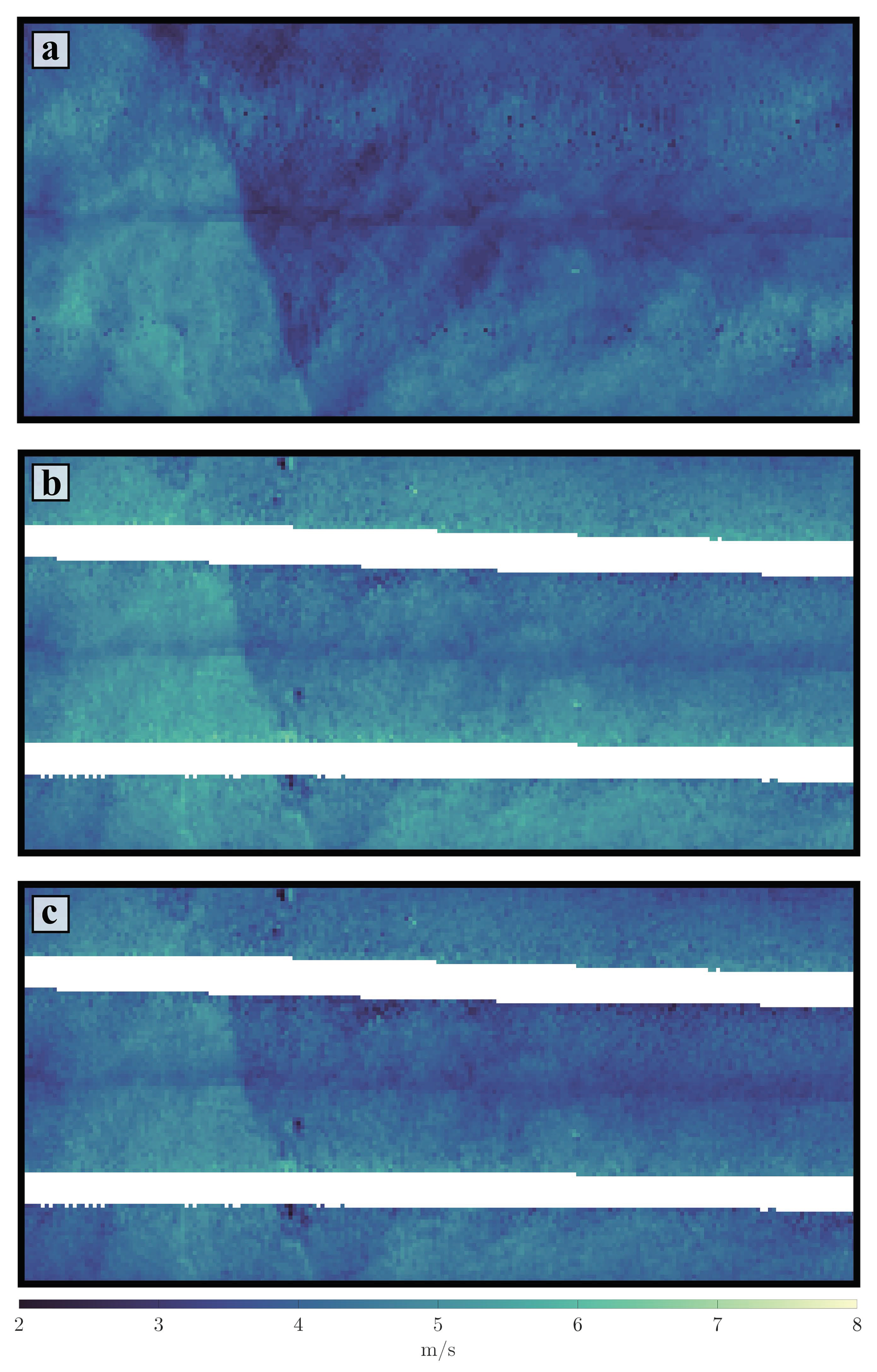
3.1.2. Wind Data Overview
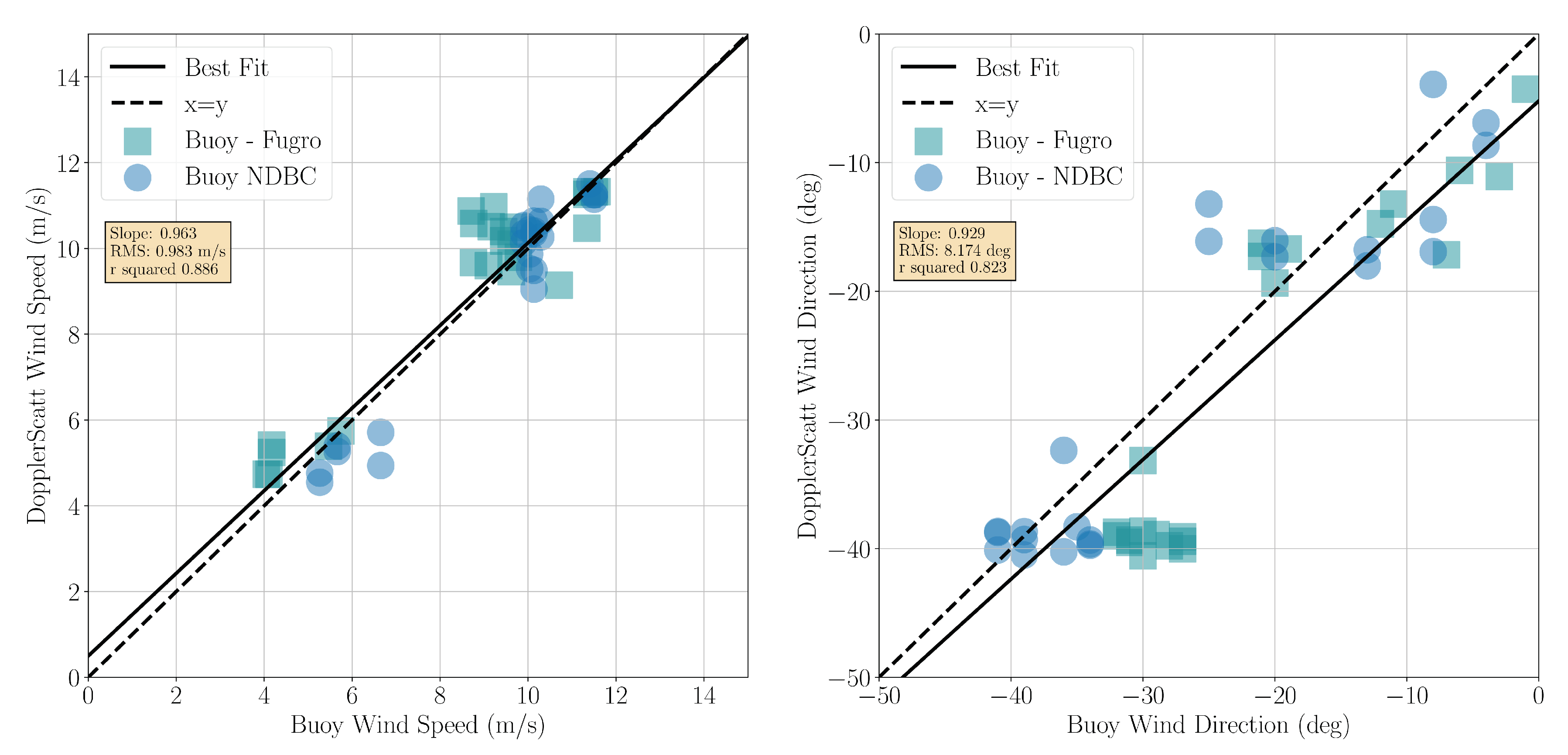
3.1.3. Buoy Wind Comparisons
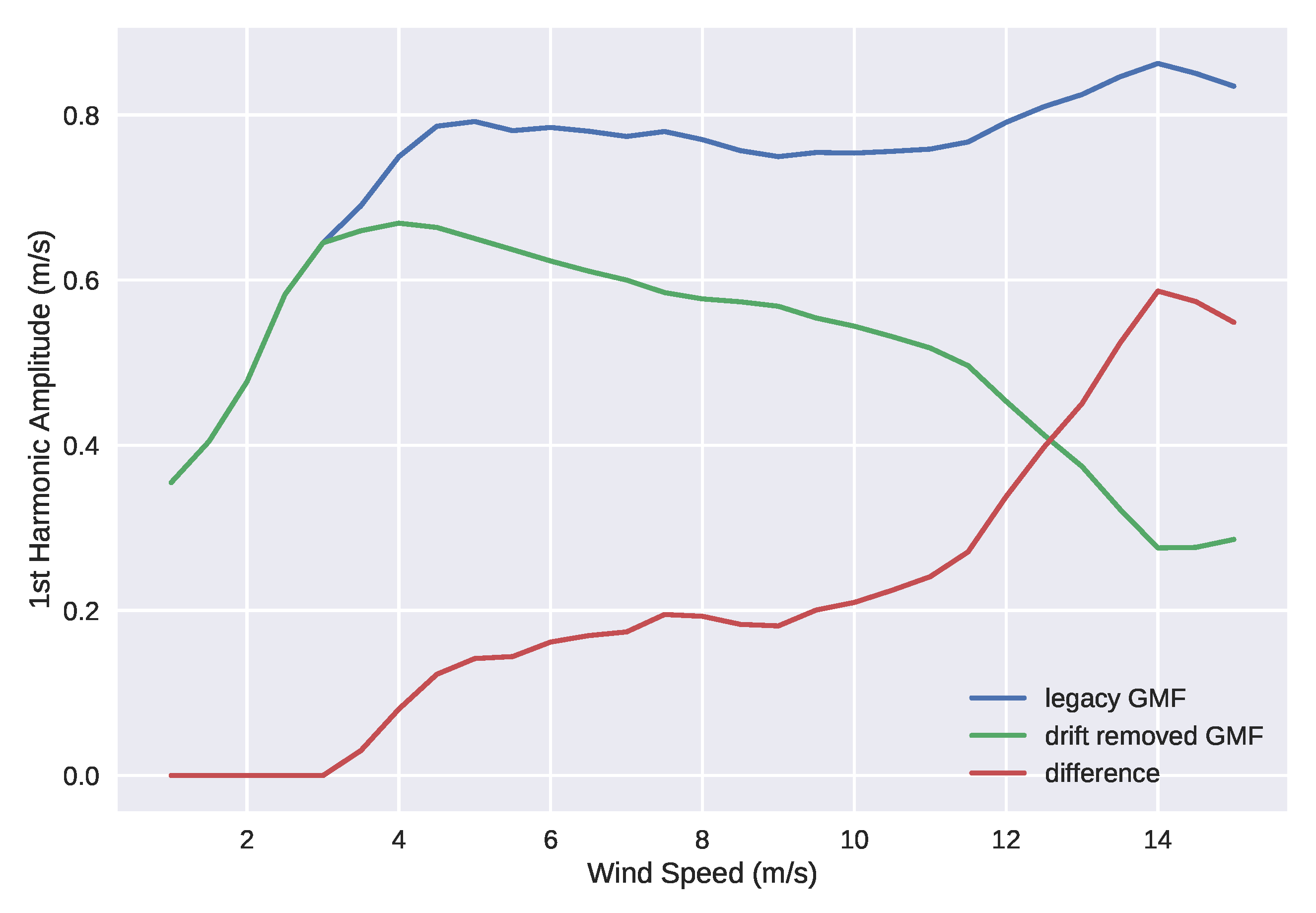
3.1.4. Scatterometer Wind Dependence on Surface Currents
3.2. Surface Current Estimation Results
Current Geophysical Model Function
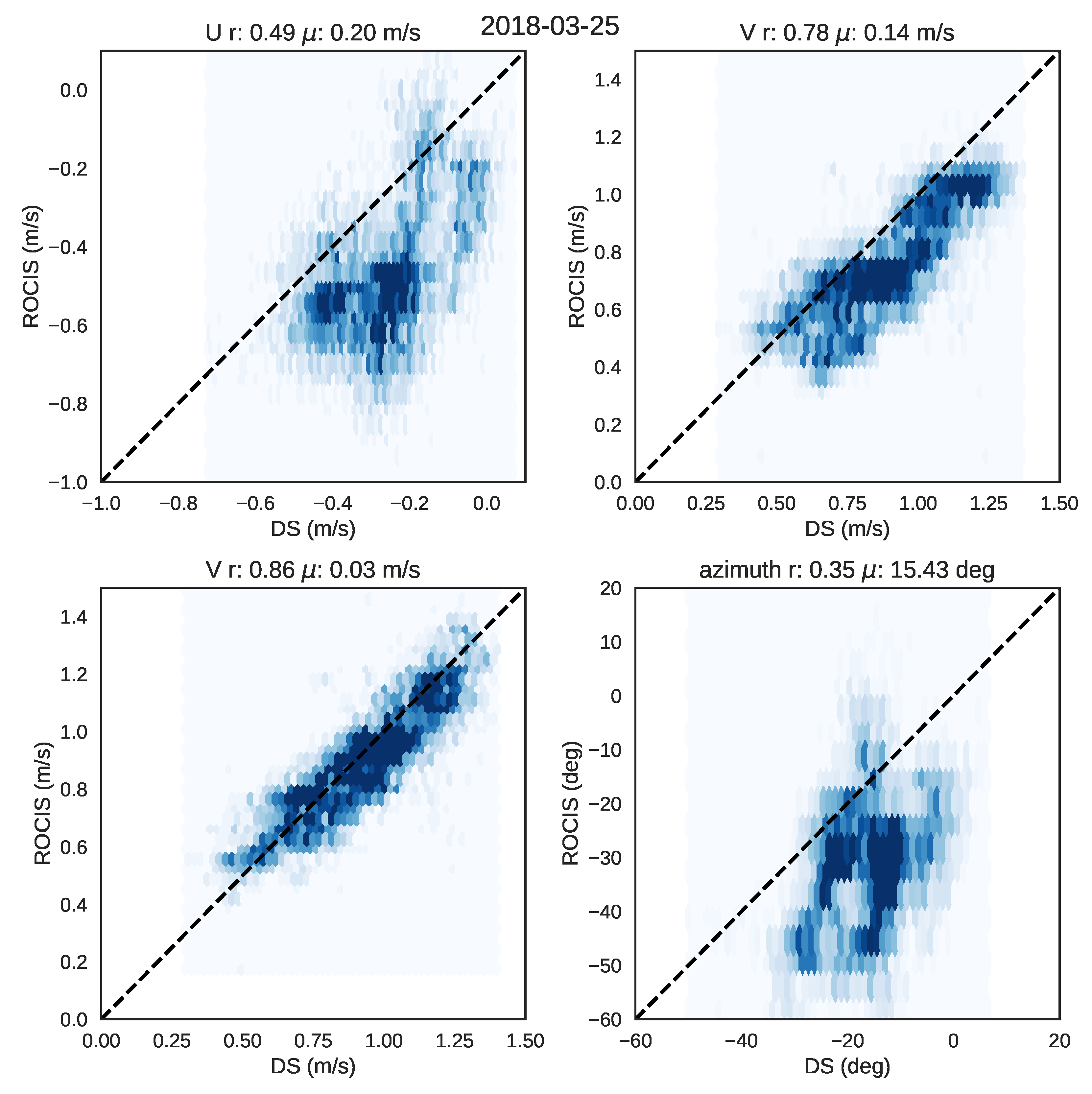
3.3. Surface Current Comparisons
4. Discussion
4.1. Ka-Band Surface Neutral Winds
4.2. Ka-Band Surface Currents
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- National Academies of Sciences, Engineering, and Medicine. Thriving on Our Changing Planet: A Decadal Strategy for Earth Observation from Space; The National Academies Press: Washington, DC, USA, 2018; p. 700. [Google Scholar] [CrossRef]
- Rodríguez, E.; Bourassa, M.; Chelton, D.; Farrar, J.T.; Long, D.; Perkovic-Martin, D.; Samelson, R. The Winds and Currents Mission Concept. Front. Mar. Sci. 2019, 6, 438. [Google Scholar] [CrossRef]
- Ardhuin, F.; Aksenov, Y.; Benetazzo, A.; Bertino, L.; Brandt, P.; Caubet, E.; Chapron, B.; Collard, F.; Cravatte, S.; Dias, F.; et al. Measuring currents, ice drift, and waves from space: The Sea Surface KInematics Multiscale monitoring (SKIM) concept. Ocean Sci. Discuss. 2017, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez, E.; Wineteer, A.; Perkovic-Martin, D.; Gál, T.; Stiles, B.W.; Niamsuwan, N.; Rodriguez Monje, R. Estimating Ocean Vector Winds and Currents Using a Ka-Band Pencil-Beam Doppler Scatterometer. Remote Sens. 2018, 10, 576. [Google Scholar] [CrossRef] [Green Version]
- McWilliams, J. Submesoscale currents in the ocean. Proc. R. Soc. A 2016, 472, 20160117. [Google Scholar] [CrossRef] [PubMed]
- Hénaff, M.L.; Kourafalou, V.H.; Paris, C.B.; Helgers, J.; Aman, Z.M.; Hogan, P.J.; Srinivasan, A. Surface Evolution of the Deepwater Horizon Oil Spill Patch: Combined Effects of Circulation and Wind-Induced Drift. Environ. Sci. Technol. 2012, 46, 7267–7273. [Google Scholar] [CrossRef]
- Cooper, C.; Yang, X.; Danmeier, D.; Stear, J. An Historical Perspective of Loop Activity from Nov. 2014 to Oct. 2015. In Offshore Technology Conference; OTC: Houston, TX, USA, 2016; p. 7. [Google Scholar] [CrossRef]
- Anderson, S.; Zuckerman, S.; Smirren, J.; Smith, R. Airborne Ocean Surface Current Measurements for Offshore Applications. In Offshore Technology Conference Proceedings; OTC: Houston, TX, USA, 2015. [Google Scholar] [CrossRef]
- Liu, T.; Xie, X.; Niiler, P. Ocean–Atmosphere Interaction over Agulhas Extension Meanders. J. Clim. 2007, 20. [Google Scholar] [CrossRef]
- Vandemark, D.; Chapron, B.; Feng, H.; Mouche, A. Sea Surface Reflectivity Variation With Ocean Temperature at Ka-Band Observed Using Near-Nadir Satellite Radar Data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 510–514. [Google Scholar] [CrossRef]
- Kelly, K.A.; Dickinson, S.; Johnson, G.C. Comparisons of scatterometer and TAO winds reveal time-varying surface currents for the tropical Pacific Ocean. J. Atmos. Ocean. Technol. 2005, 22, 735–745. [Google Scholar] [CrossRef] [Green Version]
- Plant, W.J. A model for microwave Doppler sea return at high incidence angles: Bragg scattering from bound, tilted waves. J. Geophys. Res. Ocean. 1997, 102, 21131–21146. [Google Scholar] [CrossRef]
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Ka-Band Dual Copolarized Empirical Model for the Sea Surface Radar Cross Section. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1629–1647. [Google Scholar] [CrossRef]
- Stewart, R.H.; Joy, J.W. HF radio measurements of surface currents. In Deep Sea Research and Oceanographic Abstracts; Elsevier: Amsterdam, The Netherlands, 1974; Volume 21, pp. 1039–1049. [Google Scholar]
- Ardhuin, F.; Marié, L.; Rascle, N.; Forget, P.; Roland, A. Observation and estimation of Lagrangian, Stokes, and Eulerian currents induced by wind and waves at the sea surface. J. Phys. Oceanogr. 2009, 39, 2820–2838. [Google Scholar] [CrossRef]
- Sturges, W.; Lugo-Fernandez, A.; Shargel, M. Introduction to Circulation in the Gulf of Mexico. In Washington DC American Geophysical Union Geophysical Monograph Series; Wiley: Hoboken, NJ, USA, 2005; p. 161. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Understanding and Predicting the Gulf of Mexico Loop Current: Critical Gaps and Recommendations; National Academies Press: Washington, DC, USA, 2018. [Google Scholar]
- Leben, R. Geophysical Monograph Series; Wiley: Hoboken, NJ, USA, 2005; pp. 181–201. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.M.; Bates, J.J.; Reynolds, R.W. Assessment of composite global sampling: Sea surface wind speed. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Peng, G.; Zhang, H.M.; Frank, H.P.; Bidlot, J.R.; Higaki, M.; Stevens, S.; Hankins, W.R. Evaluation of Various Surface Wind Products with OceanSITES Buoy Measurements. Weather Forecast. 2013, 28, 1281–1303. [Google Scholar] [CrossRef]
- Chelton, D.B.; Schlax, M.G.; Freilich, M.H.; Milliff, R.F. Satellite Measurements Reveal Persistent Small-Scale Features in Ocean Winds. Science 2004, 303, 978–983. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Plagge, A.M.; Vandemark, D.; Chapron, B. Examining the Impact of Surface Currents on Satellite Scatterometer and Altimeter Ocean Winds. J. Atmos. Ocean. Technol. 2012, 29, 1776–1793. [Google Scholar] [CrossRef]
- Liu, T.; Tang, W. Equivalent Neutral Wind; JPL Publication 96-17; Jet Propulsion Laboratory: Pasadena, CA, USA, 1996.
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1988; Volume 13. [Google Scholar]
- Bourassa, M.A.; Hughes, P.J. Surface Heat Fluxes and Wind Remote Sensing. In New Frontiers in Operational Oceanography; GODAE OceanView: Tallahassee, FL, USA, 2018; pp. 245–270. [Google Scholar] [CrossRef] [Green Version]
- Monin, A.S.; Obukhov, A.M. Basic laws of turbulent mixing in the surface layer of the atmosphere. Contrib. Geophys. Inst. Acad. Sci. USSR 1954, 151, e187. [Google Scholar]
- Hersbach, H. Sea Surface Roughness and Drag Coefficient as Functions of Neutral Wind Speed. J. Phys. Oceanogr. 2011, 41, 247–251. [Google Scholar] [CrossRef]
- Chapron, B.; Collard, F.; Ardhuin, F. Direct measurements of ocean surface velocity from space: Interpretation and validation. J. Geophys. Res. 2005, 110, C07008. [Google Scholar] [CrossRef]
- Van Den Bremer, T.S.; Breivik, O. Stokes drift. Phil. Trans. R. Soc. A 2018, 376, 20170104. [Google Scholar] [CrossRef] [Green Version]
- Clarke, A.; Van Gorder, S. The Relationship of Near-Surface Flow, Stokes Drift and the Wind Stress. J. Geophys. Res. Ocean. 2018, 123, 4680–4692. [Google Scholar] [CrossRef]
- Shrira, V. Surface waves on shear currents: Solution of the boundary-value problem. J. Fluid Mech. 1993, 252, 565–584. [Google Scholar] [CrossRef]
- Zhang, X. Short surface waves on surface shear. J. Fluid Mech. 2005, 541, 345–370. [Google Scholar] [CrossRef] [Green Version]
- Laxague, N.J.; Haus, B.K.; Ortiz-Suslow, D.G.; Smith, C.J.; Novelli, G.; Dai, H.; Özgökmen, T.; Graber, H.C. Passive Optical Sensing of the Near-Surface Wind-Driven Current Profile. J. Atmos. Ocean. Technol. 2017, 34, 1097–1111. [Google Scholar] [CrossRef] [Green Version]
- Morey, S.; Wienders, N.; Dukhovskoy, D.; Bourassa, M. Measurement Characteristics of Near-Surface Currents from Ultra-Thin Drifters, Drogued Drifters, and HF Radar. Remote Sens. 2018, 10, 1633. [Google Scholar] [CrossRef] [Green Version]
- Yurovsky, Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Sea Surface Ka-Band Doppler Measurements: Analysis and Model Development. Remote Sens. 2019, 11, 839. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.; Cartwright, D.; Smith, N. Observations of the Directional Spectrum of Sea Waves Using the Motions of a Floating Buoy; Prentice-Hall: Upper Saddle River, NJ, USA, 1963; pp. 111–132. [Google Scholar]
- Mitsuyasu, H.; Tasai, F.; Suhara, T.; Mizuno, S.; Ohkusu, M.; Honda, T.; Rikiishi, K. Observations of the Directional Spectrum of Ocean WavesUsing a Cloverleaf Buoy. J. Phys. Oceanogr. 1975, 5, 750–760. [Google Scholar] [CrossRef] [Green Version]
- Moller, D.; Frasier, S.J.; Porter, D.L.; McIntosh, R.E. Radar-derived interferometric surface currents and their relationship to subsurface current structure. J. Geophys. Res. Ocean. 1998, 103, 12839–12852. [Google Scholar] [CrossRef] [Green Version]
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Chapron, B.; Grodsky, S.A. Modulation of Ka-band Doppler radar signals backscattered from the sea surface. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2931–2948. [Google Scholar] [CrossRef] [Green Version]
- O’Neill, L.W.; Chelton, D.B.; Esbensen, S.K. The Effects of SST-Induced Surface Wind Speed and Direction Gradients on Midlatitude Surface Vorticity and Divergence. J. Clim. 2010, 23, 255–281. [Google Scholar] [CrossRef]
- Schneider, N.; Qiu, B. The Atmospheric Response to Weak Sea Surface Temperature Fronts. J. Atmos. Sci. 2015, 72, 3356–3377. [Google Scholar] [CrossRef] [Green Version]
- Wu, J. Wind-induced drift currents. J. Fluid Mech. 1975, 68, 49–70. [Google Scholar] [CrossRef]
- Lenain, L.; Melville, W.K. Measurements of the directional spectrum across the equilibrium saturation ranges of wind-generated surface waves. J. Phys. Oceanogr. 2017, 47, 2123–2138. [Google Scholar] [CrossRef] [Green Version]
- Peureux, C.; Benetazzo, A.; Ardhuin, F. Note on the directional properties of meter-scale gravity waves. Ocean Sci. 2018, 14, 41–52. [Google Scholar] [CrossRef]
- Plant, W.J.; Irisov, V. A joint active/passive physical model of sea surface microwave signatures. J. Geophys. Res. Ocean. 2017, 122, 3219–3239. [Google Scholar] [CrossRef]
- Polton, J.A.; Lenn, Y.D.; Elipot, S.; Chereskin, T.K.; Sprintall, J. Can Drake Passage observations match Ekman’s classic theory? J. Phys. Oceanogr. 2013, 43, 1733–1740. [Google Scholar] [CrossRef] [Green Version]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Speed (m/s) | (deg) | |
|---|---|---|
| All data | ||
| 3 | 9.18 | −114.34 |
| 4 | 5.75 | −97.05 |
| 6 | 3.09 | 7.28 |
| 7 | 3.23 | 17.25 |
| North swath only | ||
| 3 | 5.83 | −111.12 |
| 4 | 2.76 | −68.04 |
| 6 | 4.16 | 24.78 |
| 7 | 3.93 | 29.22 |
| All data, no | ||
| 3 | −5.42 | 0 |
| 4 | −1.31 | 0 |
| 6 | 2.86 | 0 |
| 7 | 2.59 | 0 |
| North swath only, no | ||
| 3 | −3.73 | 0 |
| 4 | 0.45 | 0 |
| 6 | 2.68 | 0 |
| 7 | 2.29 | 0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez, E.; Wineteer, A.; Perkovic-Martin, D.; Gál, T.; Anderson, S.; Zuckerman, S.; Stear, J.; Yang, X. Ka-Band Doppler Scatterometry over a Loop Current Eddy. Remote Sens. 2020, 12, 2388. https://doi.org/10.3390/rs12152388
Rodríguez E, Wineteer A, Perkovic-Martin D, Gál T, Anderson S, Zuckerman S, Stear J, Yang X. Ka-Band Doppler Scatterometry over a Loop Current Eddy. Remote Sensing. 2020; 12(15):2388. https://doi.org/10.3390/rs12152388
Chicago/Turabian StyleRodríguez, Ernesto, Alexander Wineteer, Dragana Perkovic-Martin, Tamás Gál, Steven Anderson, Seth Zuckerman, James Stear, and Xiufeng Yang. 2020. "Ka-Band Doppler Scatterometry over a Loop Current Eddy" Remote Sensing 12, no. 15: 2388. https://doi.org/10.3390/rs12152388
APA StyleRodríguez, E., Wineteer, A., Perkovic-Martin, D., Gál, T., Anderson, S., Zuckerman, S., Stear, J., & Yang, X. (2020). Ka-Band Doppler Scatterometry over a Loop Current Eddy. Remote Sensing, 12(15), 2388. https://doi.org/10.3390/rs12152388