Improved Estimation of Regional Surface Mass Variations from GRACE Intersatellite Geopotential Differences Using a Priori Constraints



Abstract
:1. Introduction
2. Methods and Data
2.1. Improved Energy Balance Equation
2.2. Inversion Method of Regional Surface Mass Variations
2.3. Adaptive Estimation Method Using a Priori Constraints
2.4. Datasets Used in Our Study
2.4.1. GRACE Level-1B Data and Background Models
2.4.2. Global Land Data Assimilation System (GLDAS) Models
2.4.3. GRACE Mascon Solutions
2.4.4. GRACE Spherical Harmonic (SH) Solutions
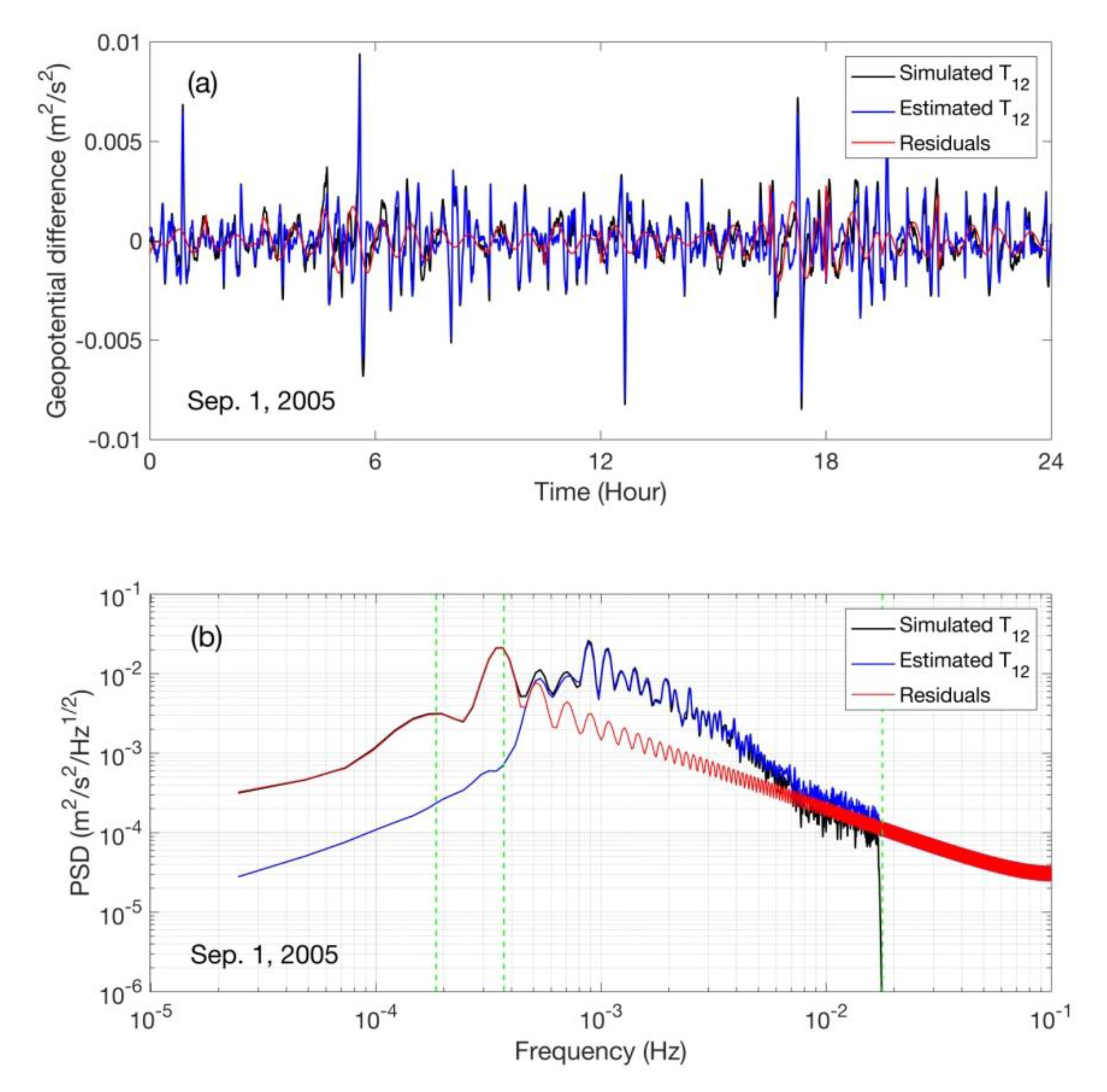
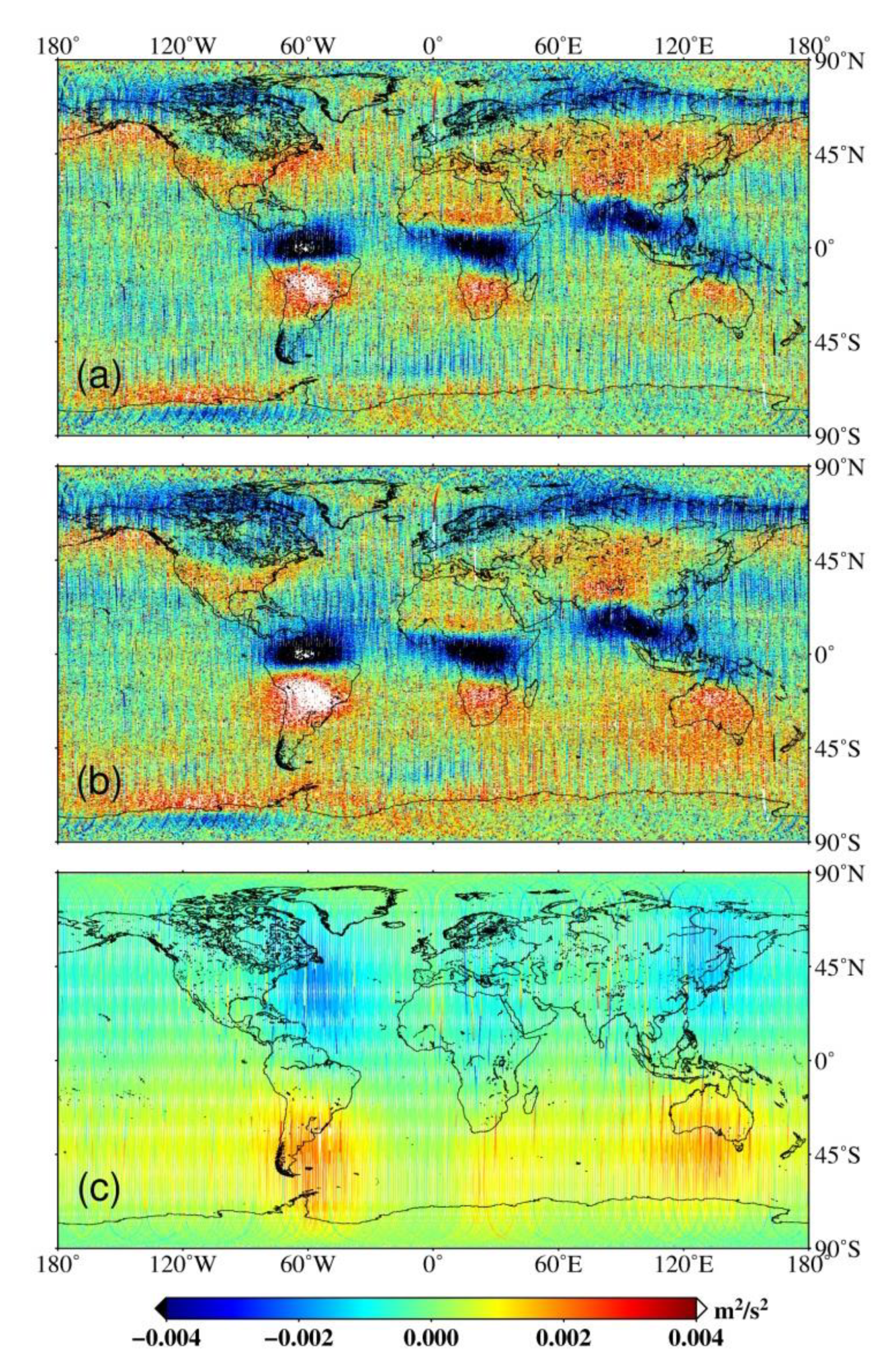
3. Geopotential Differences Estimation Based on the RCR Technique
4. Results
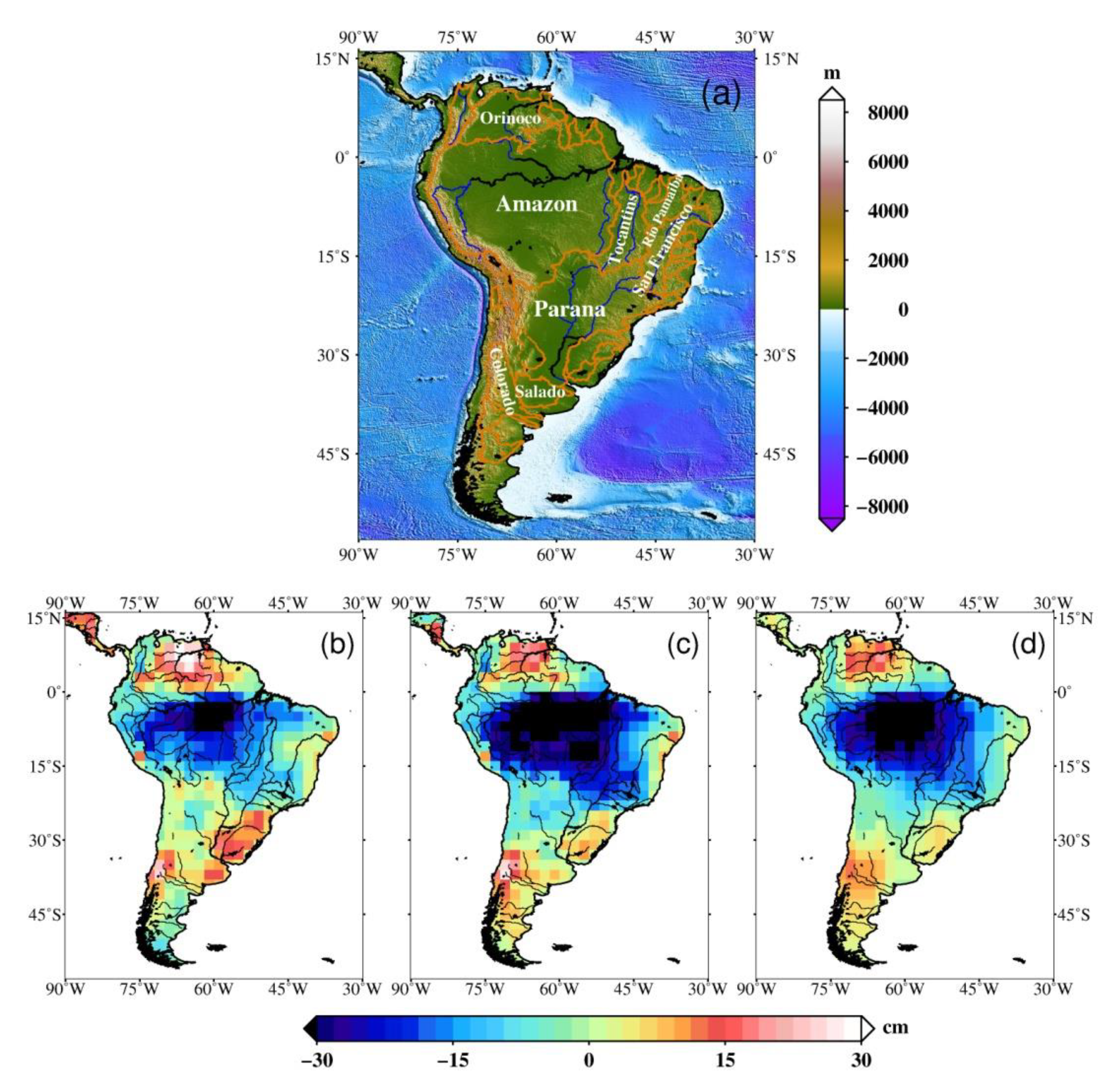
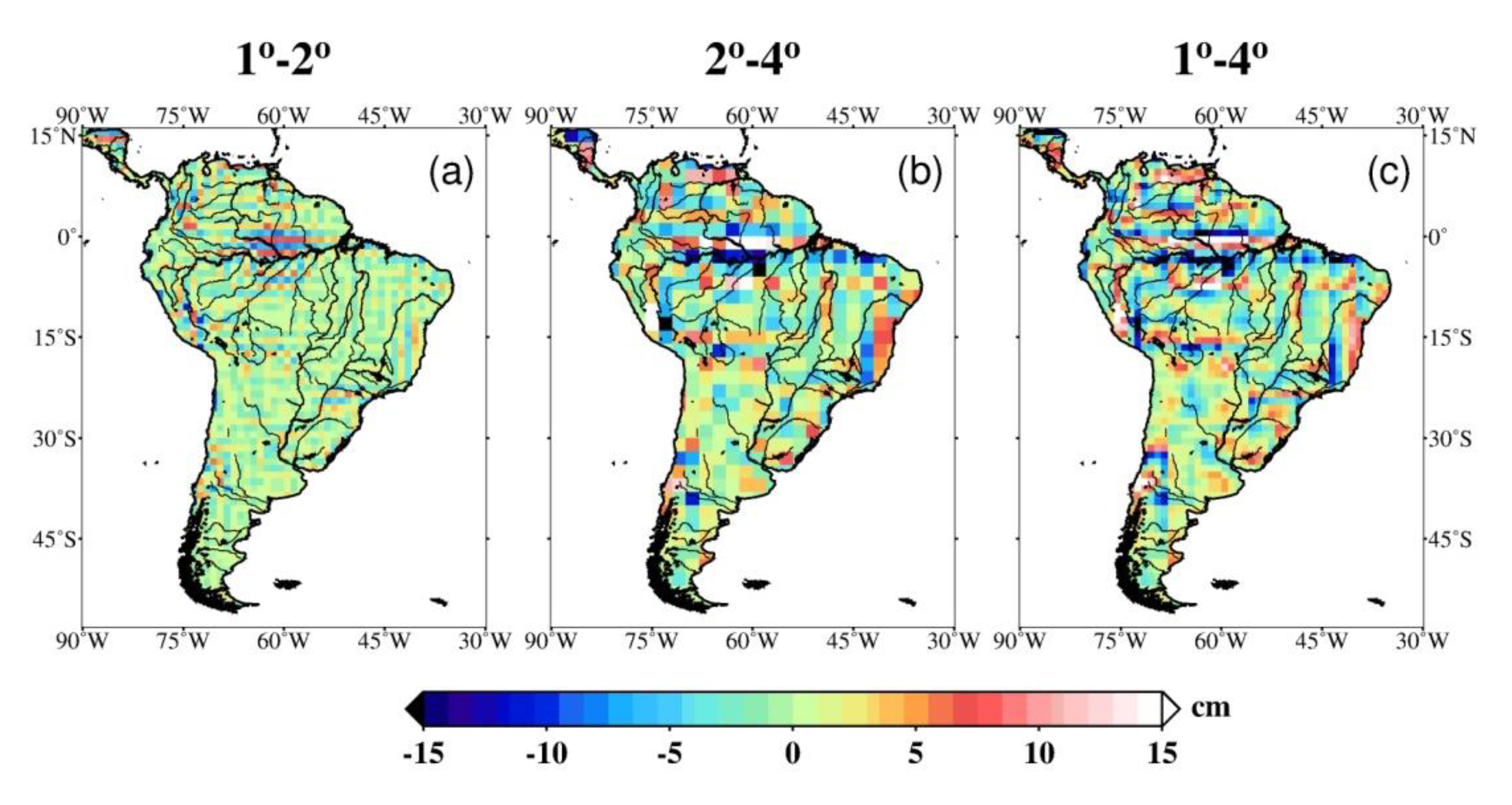
4.1. Preliminary Tests over South America
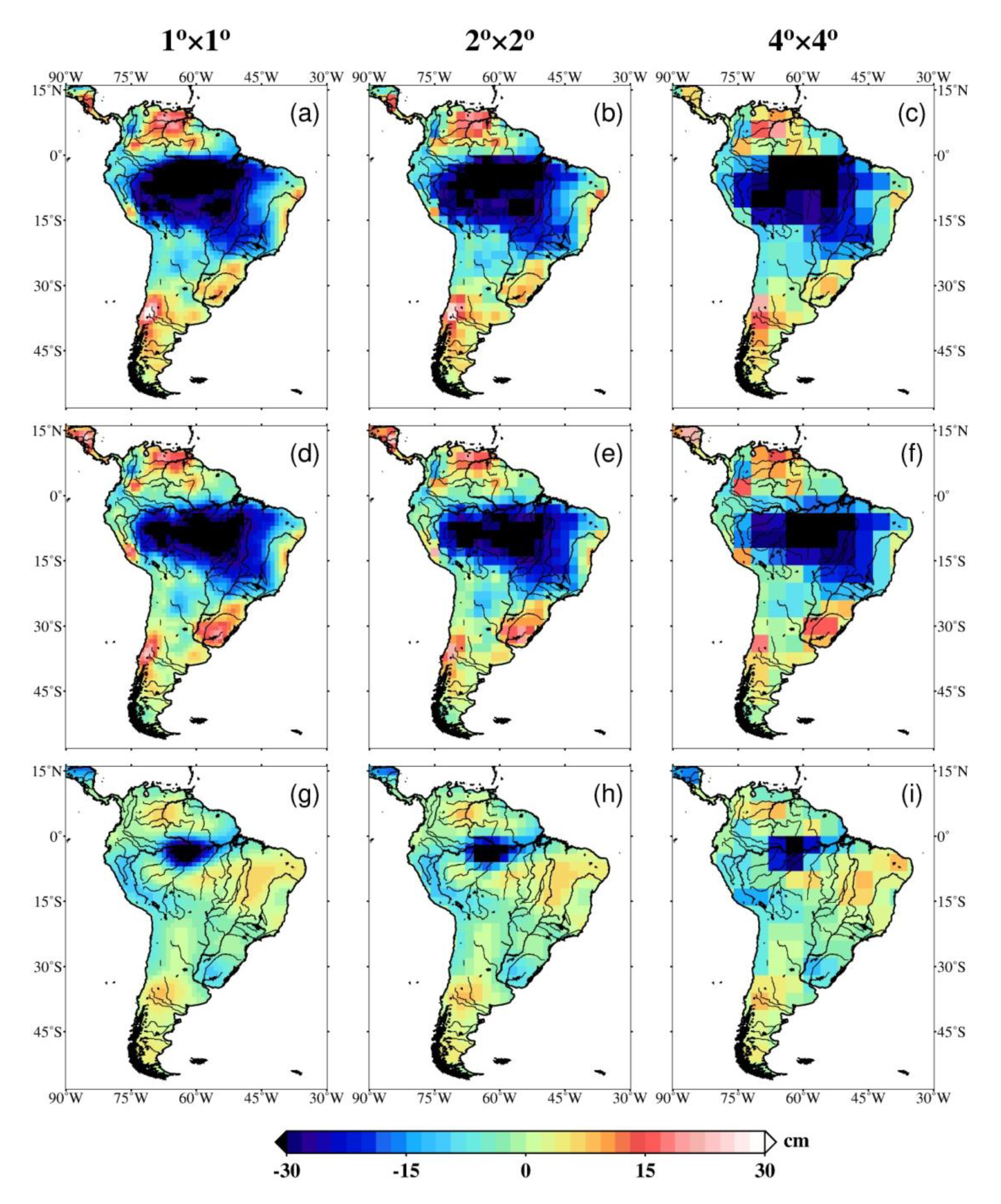
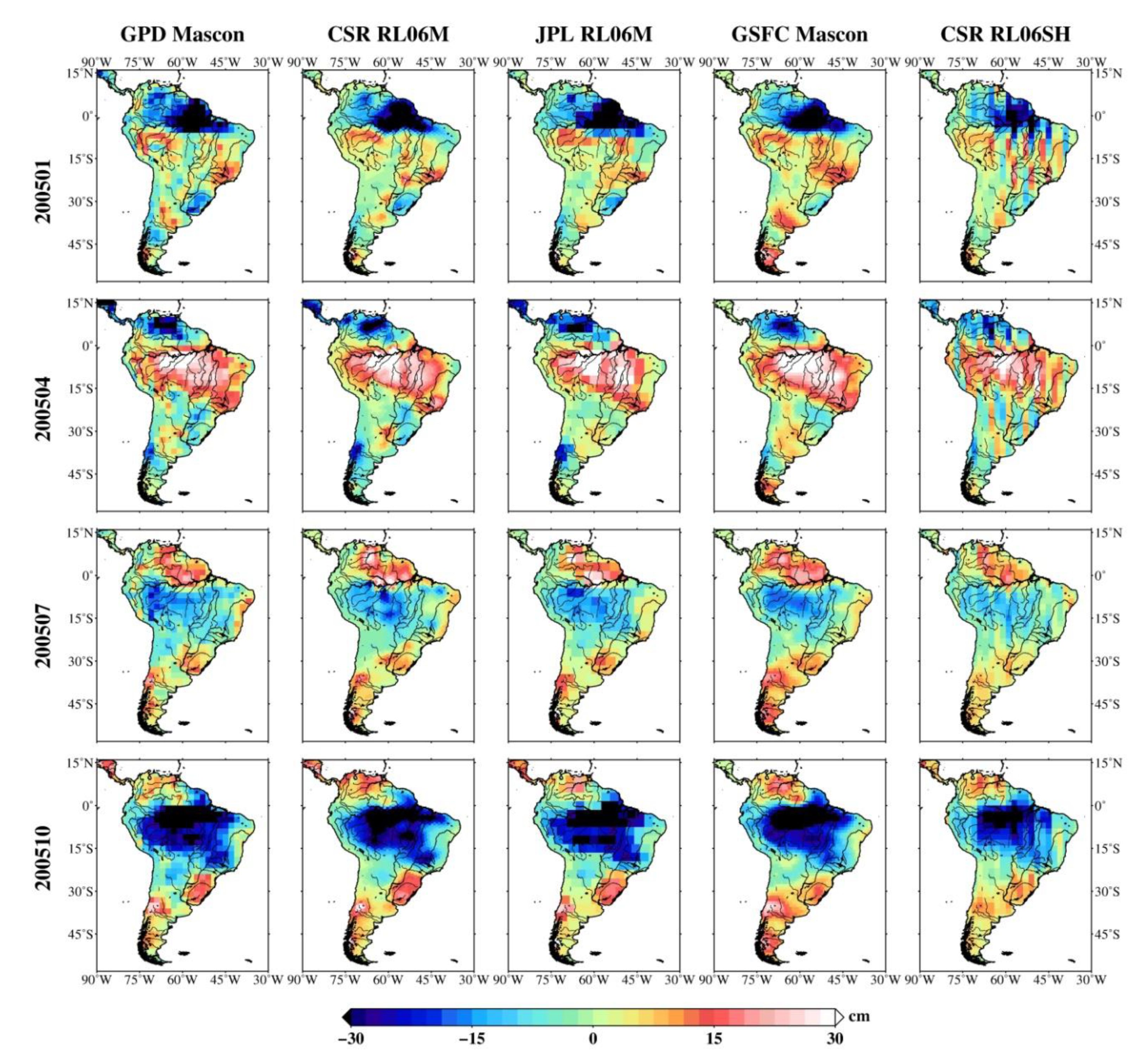
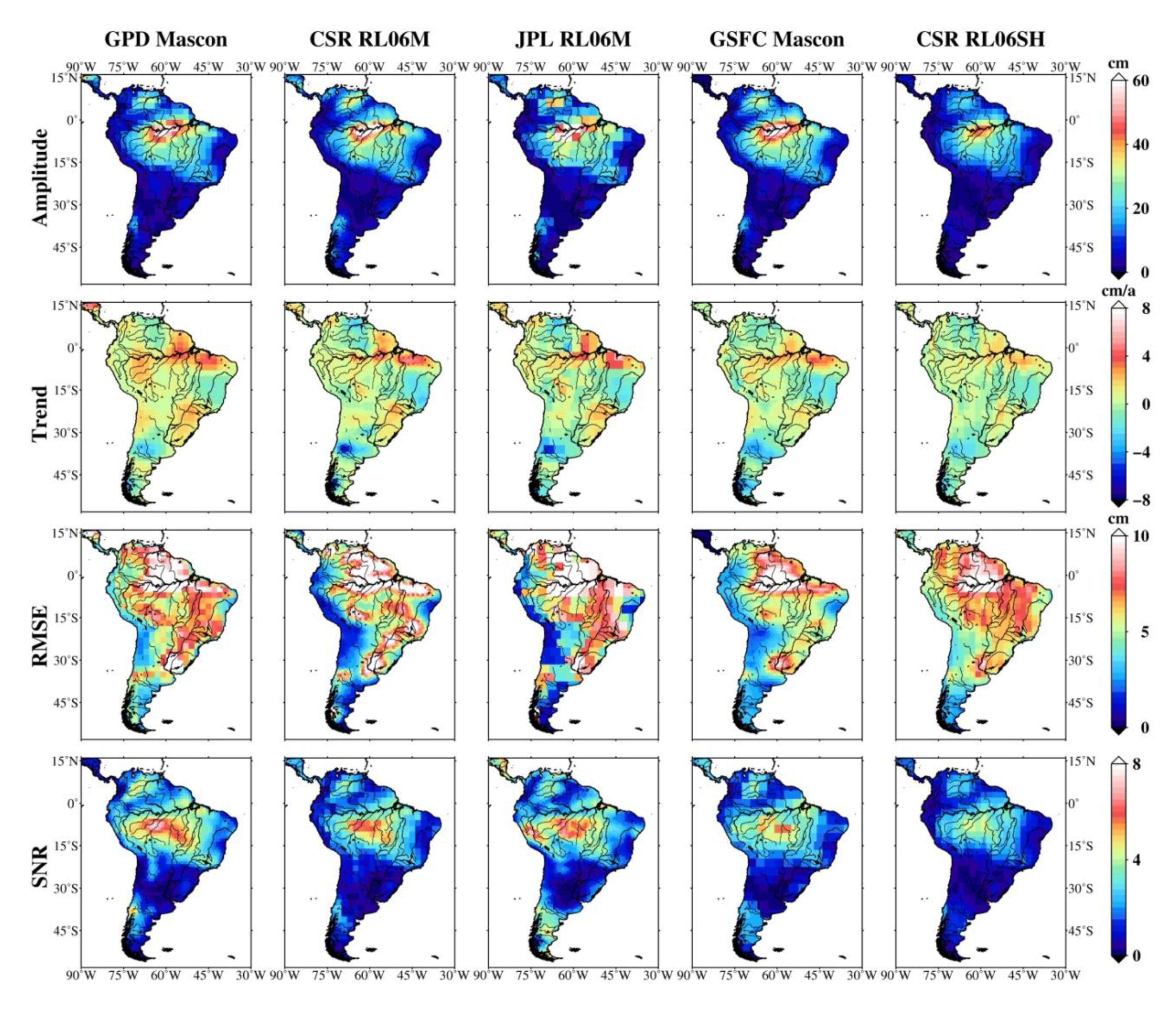
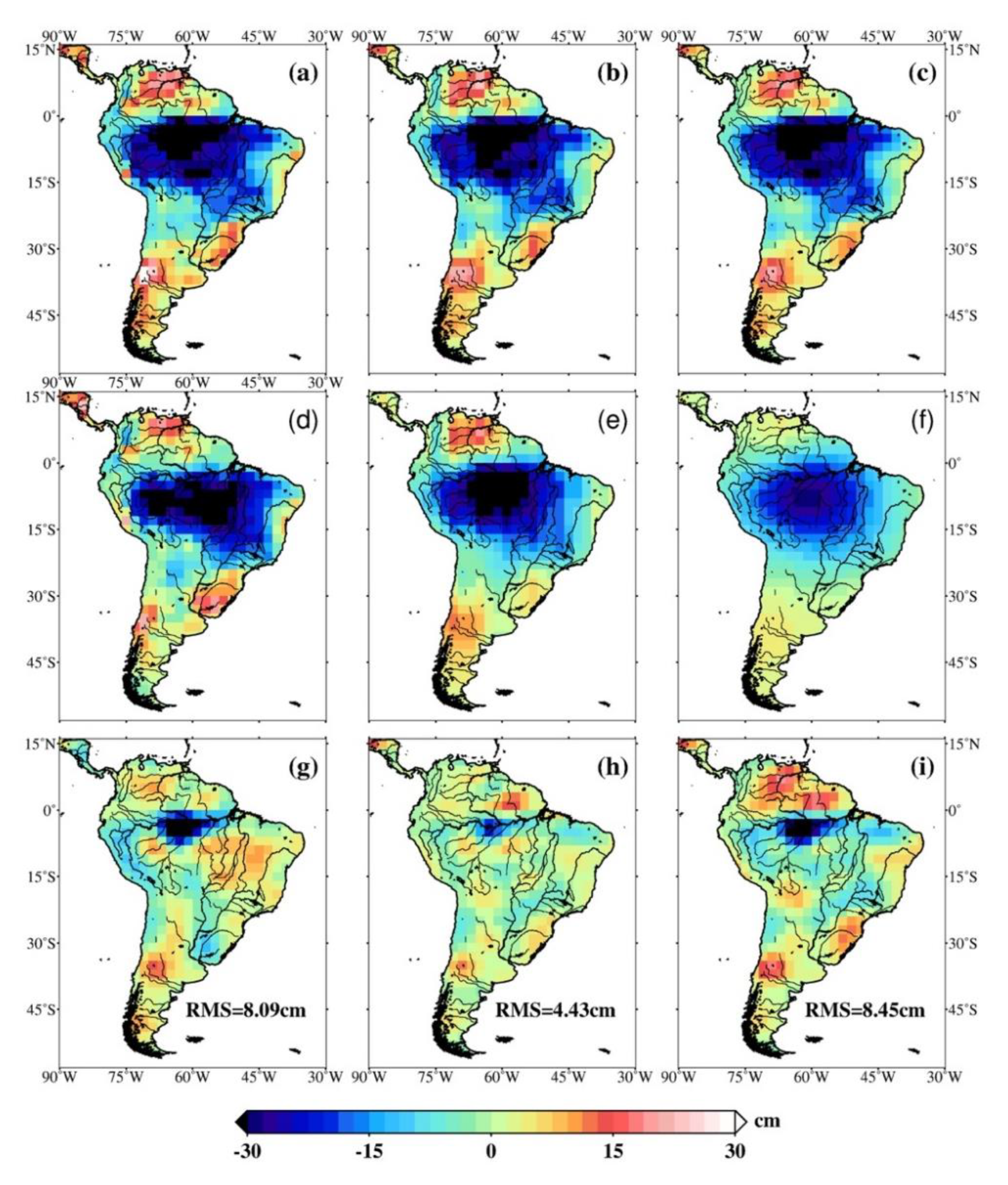
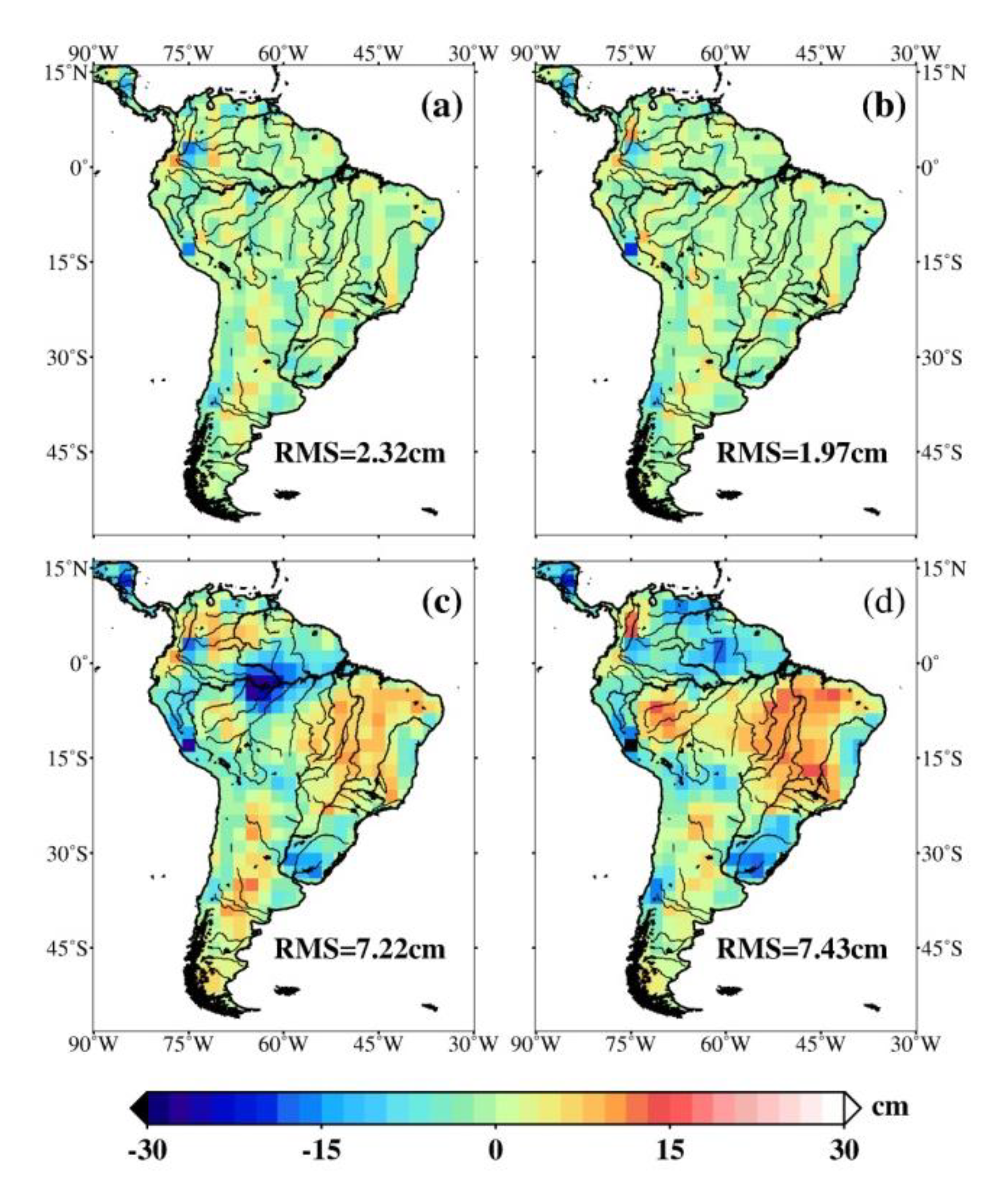
4.2. Spatial Distribution of Mass Changes over South America
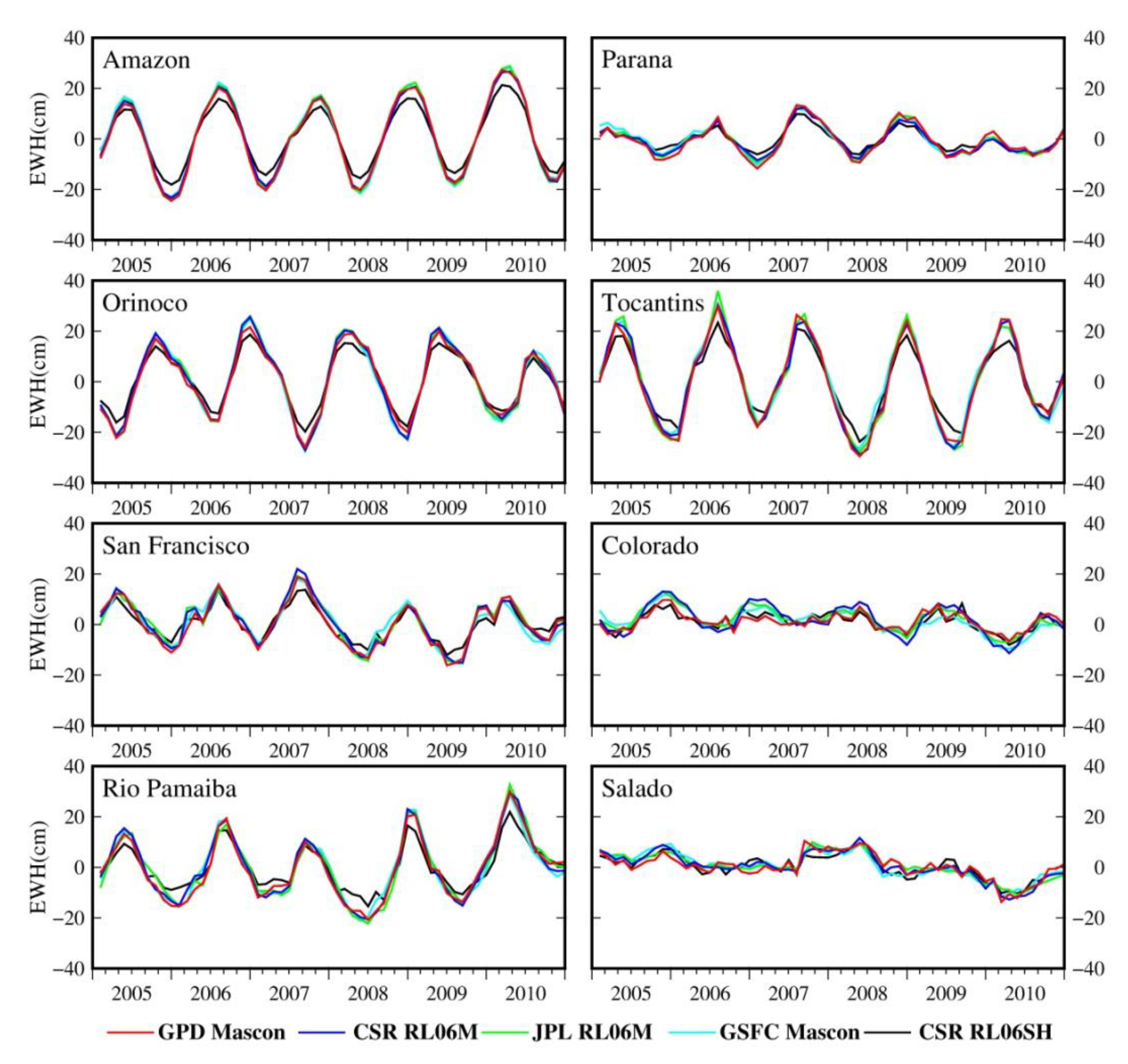
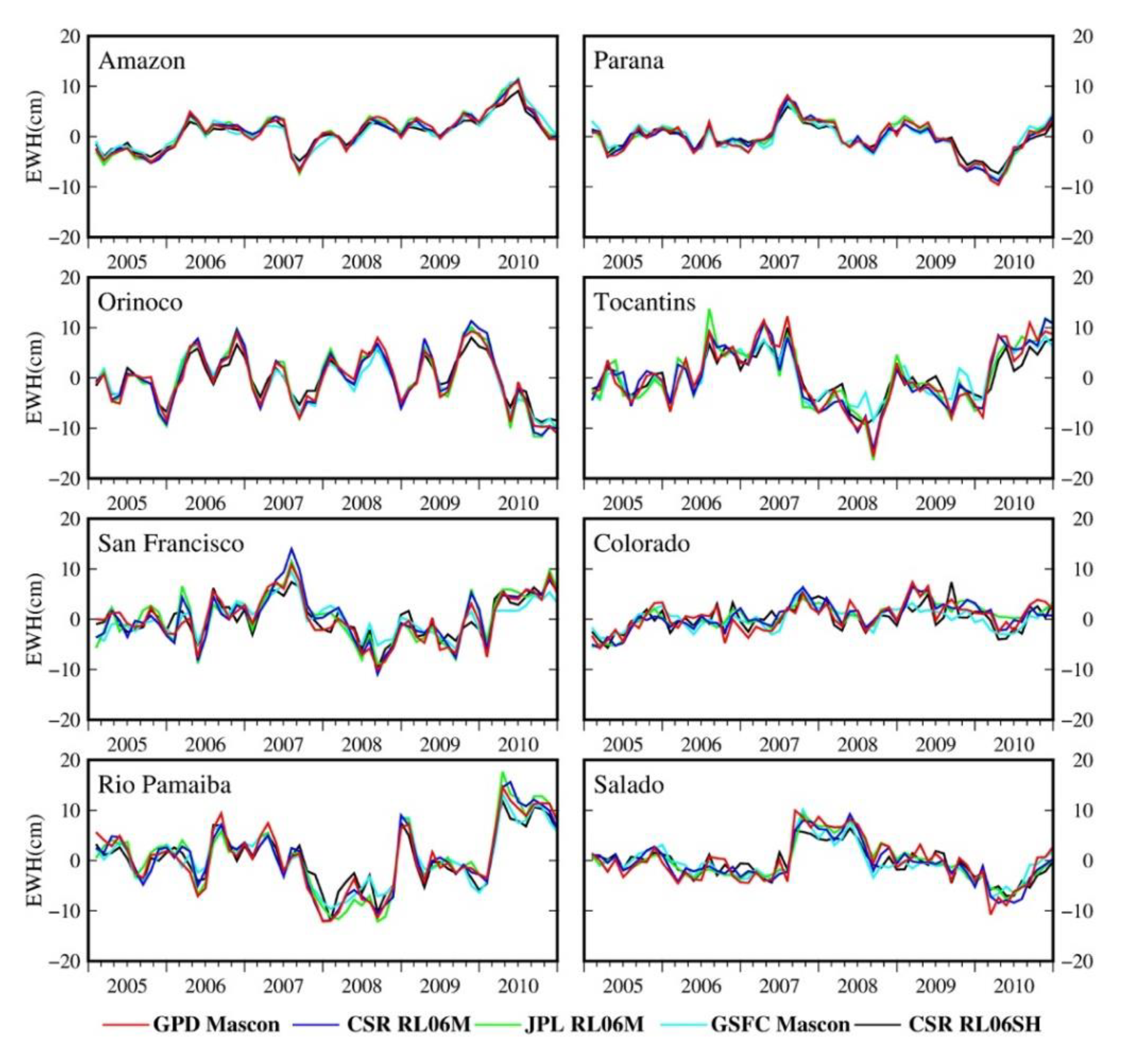
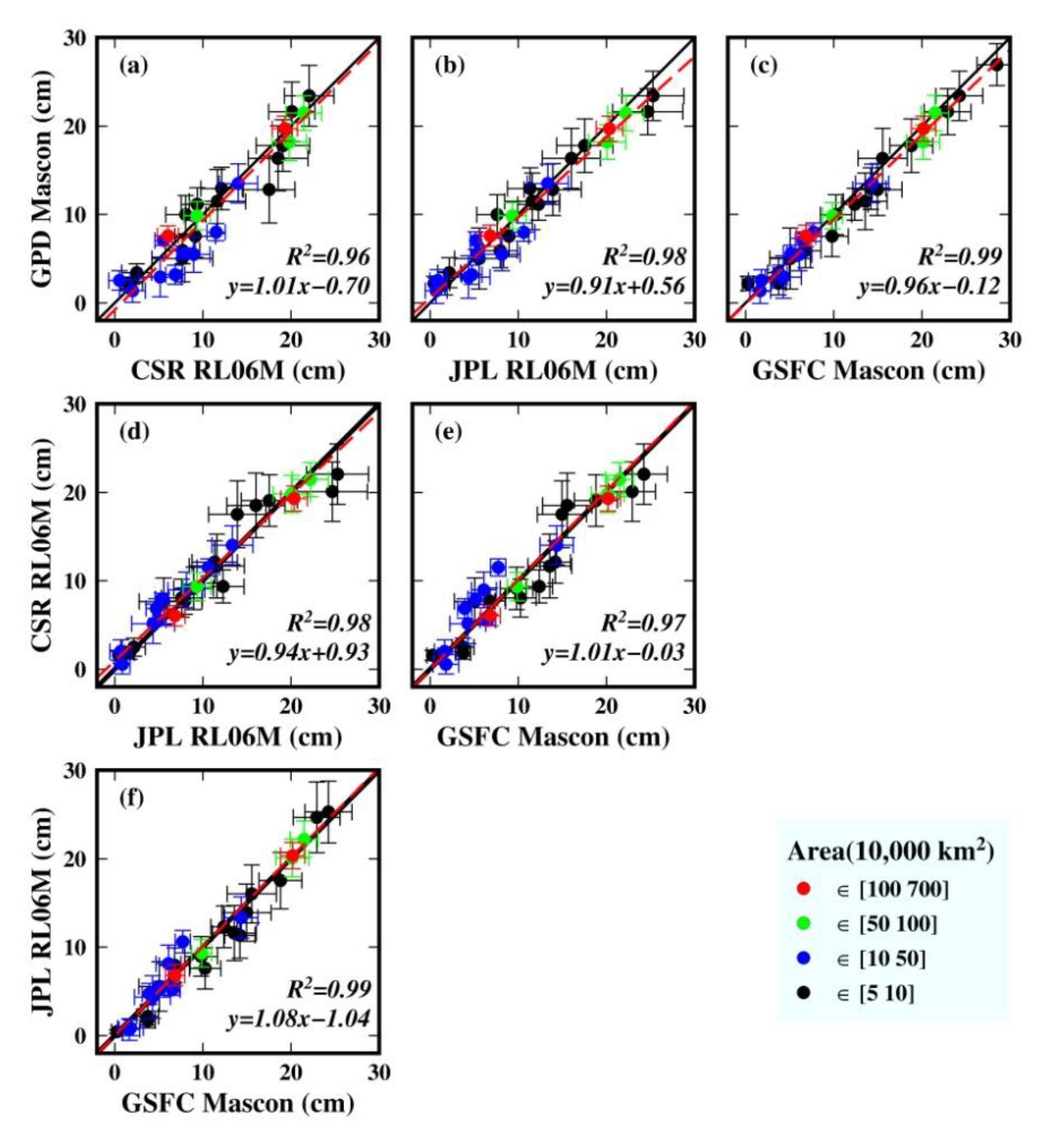
4.3. Basin-Scale Mass Changes over South America
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tapley, B.D.; Watkins, M.M.; Flechtner, F.; Reigber, C.; Bettadpur, S.; Rodell, M.; Sasgen, I.; Famiglietti, J.; Landerer, F.W.; Chambers, D.P.; et al. Contributions of GRACE to Understanding Climate Change. Nat. Clim. Chang. 2019, 9, 358–369. [Google Scholar] [CrossRef]
- Chen, J. Satellite Gravimetry and Mass Transport in the Earth System. Geodesy Geodyn. 2019, 10, 402–415. [Google Scholar] [CrossRef]
- Wahr, J.; Molenaar, M.; Bryan, F. Time Variability of the Earth’s Gravity Field: Hydrological and Oceanic Effects and Their Possible Detection Using GRACE. J. Geophys. Res. Solid Earth. 1998, 103, 30205–30229. [Google Scholar] [CrossRef]
- Tapley, B.D.; Bettadpur, S.; Ries, J.C.; Thompson, P.F.; Watkins, M.M. GRACE Measurements of Mass Variability in the Earth System. Science 2004, 305, 503–505. [Google Scholar] [CrossRef] [Green Version]
- Save, H.; Bettadpur, S.; Tapley, B.D. Reducing Errors in the GRACE Gravity Solutions Using Regularization. J. Geodesy. 2012, 86, 695–711. [Google Scholar] [CrossRef]
- Bettadpur, S. UTCSR Level-2 Processing Standards Document For Level-2 Product Release 0006; GRACE Publication 327-742; The University of Texas at Austin: Austin, TX, USA, 2018. [Google Scholar]
- Yuan, D.N. JPL Level-2 Processing Standards Document for Level-2 Product Release 06; GRACE Publication 327-744; Jet Propulsion Laboratory, California Institute of Technology: La Cañada Flintridge, CA, USA, 2018.
- Dahle, C.; Flechtner, F.; Murböck, M.; Michalak, G.; Neumayer, K.; Abrykosov, O.; Reinhold, A.; König, R. GFZ Level-2 Processing Standards Document for Level-2 Product Release 06; GRACE Publication 327-743; GFZ German Research Centre for Geosciences: Potsdam, Germany, 2018. [Google Scholar]
- Dahle, C.; Murböck, M.; Flechtner, F.; Dobslaw, H.; Michalak, G.; Neumayer, K.H.; Abrykosov, O.; Reinhold, A.; König, R.; Sulzbach, R.; et al. The GFZ GRACE RL06 Monthly Gravity Field Time Series: Processing Details and Quality Assessment. Remote. Sens. 2019, 11, 2116. [Google Scholar] [CrossRef] [Green Version]
- Wahr, J.; Swenson, S.; Velicogna, I. Accuracy of GRACE Mass Estimates. Geophys. Res. Lett. 2006, 33, 178–196. [Google Scholar] [CrossRef] [Green Version]
- Luthcke, S.B.; Sabaka, T.; Loomis, B.D.; Arendt, A.; McCarthy, J.; Camp, J. Antarctica, Greenland and Gulf of Alaska Land-Ice Evolution from an Iterated GRACE Global Mascon Solution. J. Glaciol. 2013, 59, 613–631. [Google Scholar] [CrossRef]
- Devaraju, B.; Sneeuw, N. On the Spatial Resolution of Homogeneous Isotropic Filters on the Sphere. In International Association of Geodesy Symposia; Springer Science and Business Media LLC: Berlin, Germany, 2015; pp. 67–73. [Google Scholar] [CrossRef]
- Vishwakarma, B.D.; Devaraju, B.; Sneeuw, N. What Is the Spatial Resolution of GRACE Satellite Products for Hydrology? Remote Sens. 2018, 10, 852. [Google Scholar] [CrossRef] [Green Version]
- Swenson, S.; Wahr, J. Post-Processing Removal of Correlated Errors in GRACE Data. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Klees, R.; Revtova, E.A.; Gunter, B.; Ditmar, P.; Oudman, E.; Winsemius, H.C.; Savenije, H.H. The Design of an Optimal Filter for Monthly GRACE Gravity Models. Geophys. J. Int. 2008, 175, 417–432. [Google Scholar] [CrossRef] [Green Version]
- Landerer, F.W.; Swenson, S.C. Accuracy of Scaled GRACE Terrestrial Water Storage Estimates. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Chen, J.; Wilson, C.R.; Li, J.; Zhang, Z. Reducing Leakage Error in GRACE-Observed Long-Term Ice Mass Change: A Case Study in West Antarctica. J. Geodesy. 2015, 89, 925–940. [Google Scholar] [CrossRef]
- Vishwakarma, B.D.; Devaraju, B.; Sneeuw, N. Minimizing the Effects of Filtering on Catchment Scale GRACE Solutions. Water Resour. Res. 2016, 52, 5868–5890. [Google Scholar] [CrossRef] [Green Version]
- Klees, R.; Zapreeva, E.A.; Winsemius, H.; Savenije, H.H. The Bias in GRACE Estimates of Continental Water Storage Variations. Hydrol. Earth Syst. Sci. 2007, 11, 1227–1241. [Google Scholar] [CrossRef] [Green Version]
- Long, D.; Longuevergne, L.; Scanlon, B.R. Global Analysis of Approaches for Deriving Total Water Storage Changes from GRACE Satellites. Water Resour. Res. 2015, 51, 2574–2594. [Google Scholar] [CrossRef] [Green Version]
- Vishwakarma, B.D.; Horwath, M.; Devaraju, B.; Groh, A.; Sneeuw, N. A Data-Driven Approach for Repairing the Hydrological Catchment Signal Damage Due to Filtering of GRACE Products. Water Resour. Res. 2017, 53, 9824–9844. [Google Scholar] [CrossRef]
- Rowlands, D.D.; Luthcke, S.B.; McCarthy, J.J.; Klosko, S.M.; Chinn, D.S.; Lemoine, F.G.; Boy, J.-P.; Sabaka, T.J. Global Mass Flux Solutions from GRACE: A Comparison of Parameter Estimation strategies—Mass Concentrations Versus Stokes Coefficients. J. Geophys. Res. Space Phys. 2010, 115. [Google Scholar] [CrossRef]
- Sabaka, T.J.; Rowlands, D.D.; Luthcke, S.B.; Boy, J.-P. Improving Global Mass Flux Solutions from Gravity Recovery and Climate Experiment (GRACE) through Forward Modeling and Continuous Time Correlation. J. Geophys. Res. Space Phys. 2010, 115. [Google Scholar] [CrossRef]
- Watkins, M.M.; Wiese, D.N.; Yuan, D.-N.; Boening, C.; Landerer, F.W. Improved Methods for Observing Earth’s Time Variable Mass Distribution With GRACE Using Spherical Cap Mascons. J. Geophys. Res. Solid Earth. 2015, 120, 2648–2671. [Google Scholar] [CrossRef]
- Wiese, D.N.; Landerer, F.W.; Watkins, M.M. Quantifying and Reducing Leakage Errors in the JPL RL05M GRACE Mascon Solution. Water Resour. Res. 2016, 52, 7490–7502. [Google Scholar] [CrossRef]
- Save, H.; Bettadpur, S.; Tapley, B.D. High-Resolution CSR GRACE RL05 Mascons. J. Geophys. Res. Solid Earth. 2016, 121, 7547–7569. [Google Scholar] [CrossRef]
- Scanlon, B.R.; Zhang, Z.; Save, H.; Wiese, D.N.; Landerer, F.W.; Long, D.; Longuevergne, L.; Chen, J. Global Evaluation of New GRACE Mascon Products for Hydrologic Applications. Water Resour. Res. 2016, 52, 9412–9429. [Google Scholar] [CrossRef]
- Save, H. CSR GRACE RL06 Mascon Solutions. 2019. Available online: https://doi.Org/10.18738/T8/UN91VR (accessed on 15 June 2020).
- Loomis, B.D.; Luthcke, S.B.; Sabaka, T.J. Regularization and Error Characterization of GRACE Mascons. J. Geodesy. 2019, 93, 1381–1398. [Google Scholar] [CrossRef] [PubMed]
- Jacob, T.; Wahr, J.; Pfeffer, W.T.; Swenson, S. Recent Contributions of Glaciers and Ice Caps to Sea Level Rise. Nature 2012, 482, 514–518. [Google Scholar] [CrossRef] [PubMed]
- Schrama, E.; Wouters, B.; Rietbroek, R. A Mascon Approach to Assess Ice Sheet and Glacier Mass Balances and Their Uncertainties from GRACE Data. J. Geophys. Res. Solid Earth. 2014, 119, 6048–6066. [Google Scholar] [CrossRef]
- Chen, T.; Shen, Y.; Chen, W. Mass Flux Solution in the Tibetan Plateau Using Mascon Modeling. Remote. Sens. 2016, 8, 439. [Google Scholar] [CrossRef] [Green Version]
- Ran, J.; Ditmar, P.; Klees, R.; Farahani, H.H. Statistically Optimal Estimation of Greenland Ice Sheet Mass Variations from GRACE Monthly Solutions Using an Improved Mascon Approach. J. Geodesy. 2017, 92, 299–319. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Han, S.-C.; Shum, C.K.; Braun, A. High-Resolution Continental Water Storage Recovery from low–low Satellite-to-Satellite Tracking. J. Geodyn. 2005, 39, 11–28. [Google Scholar] [CrossRef]
- Han, S.-C.; Alsdorf, D.; Shum, C.K.; Jekeli, C. Improved Estimation of Terrestrial Water Storage Changes from GRACE. Geophys. Res. Lett. 2005, 32, 99–119. [Google Scholar] [CrossRef]
- Ramillien, G.; Biancale, R.; Gratton, S.; Vasseur, X.; Bourgogne, S. GRACE-Derived Surface Water Mass Anomalies by Energy Integral Approach: Application to Continental Hydrology. J. Geodesy. 2011, 85, 313–328. [Google Scholar] [CrossRef]
- Ramillien, G.L.; Seoane, L.; Frappart, F.; Biancale, R.; Gratton, S.; Vasseur, X.; Bourgogne, S. Constrained Regional Recovery of Continental Water Mass Time-Variations from GRACE-Based Geopotential Anomalies over South America. Surv. Geophys. 2012, 33, 887–905. [Google Scholar] [CrossRef] [Green Version]
- Tangdamrongsub, N.; Hwang, C.; Shum, C.K.; Wang, L. Regional Surface Mass Anomalies from GRACE KBR Measurements: Application of L-Curve Regularization and a priori Hydrological Knowledge. J. Geophys. Res. Space Phys. 2012, 117, 11406. [Google Scholar] [CrossRef] [Green Version]
- Shang, K.; Guo, J.; Shum, C.K.; Dai, C.; Luo, J. GRACE Time-Variable Gravity Field Recovery Using an Improved Energy Balance Approach. Geophys. J. Int. 2015, 203, 1773–1786. [Google Scholar] [CrossRef]
- Jekeli, C. The Determination of Gravitational Potential Differences from Satellite-to-Satellite Tracking. Celest. Mech. Dyn. Astron. 1999, 75, 85–101. [Google Scholar] [CrossRef]
- Han, S.-C.; Shum, C.K.; Jekeli, C. Precise Estimation of in Situ Geopotential Differences from GRACE Low-Low Satellite-to-Satellite Tracking and Accelerometer Data. J. Geophys. Res. Space Phys. 2006, 111, 4411–4423. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.Y.; Shang, K.; Jekeli, C.; Shum, C.K. On the Energy Integral Formulation of Gravitational Potential Differences from Satellite-to-Satellite Tracking. Celest. Mech. Dyn. Astron. 2015, 121, 415–429. [Google Scholar] [CrossRef]
- Frappart, F.; Seoane, L.; Ramillien, G. Validation of GRACE-Derived Terrestrial Water Storage from a Regional Approach over South America. Remote. Sens. Environ. 2013, 137, 69–83. [Google Scholar] [CrossRef] [Green Version]
- Ramillien, G.; Frappart, F.; Seoane, L. Application of the Regional Water Mass Variations from GRACE Satellite Gravimetry to Large-Scale Water Management in Africa. Remote. Sens. 2014, 6, 7379–7405. [Google Scholar] [CrossRef] [Green Version]
- Koch, K.R.; Kusche, J. Regularization of Geopotential Determination from Satellite Data by Variance Components. J. Geodesy. 2002, 76, 259–268. [Google Scholar] [CrossRef]
- Ries, J.; Bettadpur, S.; Eanes, R.; Kang, Z.; Ko, U.; McCullough, C.; Nagel, P.; Pie, N.; Poole, S.; Richter, T.; et al. The Combination Global Gravity Model GGM05C; Technical Memorandum, CSR-TM-16-01; The University of Texas at Austin: Austin, TX, USA, 2016. [Google Scholar]
- Folkner, W.M.; Williams, J.G.; Boggs, D.H.; Park, R.S.; Kuchynka, P. The Planetary and Lunar Ephemerides DE430 and DE431; IPN Progress Report; Jet Propulsion Laboratory, California Institute of Technology: Pasadena, CA, USA, 2014; Volume 42, p. 81.
- Petit, G.; Luzum, B. IERS Conventions (2010); IERS Technical Note No. 36; Verlag Des Bundesamts für Kartographie Und Geodäsie: Frankfurt Am Main, Germany, 2010; p. 179. [Google Scholar]
- Savcenko, R.; Bosch, W. EOT11a—empirical Ocean Tide Model from Multi-Mission Satellite Altimetry; Deutsches Geodätisches Forschungsinstitut: München, Germany, 2012; Volume 89, p. 49. [Google Scholar]
- Ray, R.D.; Ponte, R.M. Barometric Tides from ECMWF Operational Analyses. Ann. Geophys. 2003, 21, 1897–1910. [Google Scholar] [CrossRef] [Green Version]
- Desai, S.D. Observing the Pole Tide with Satellite Altimetry. J. Geophys. Res. Space Phys. 2002, 107, 3186. [Google Scholar] [CrossRef]
- Rodell, M.; Houser, P.; Jambor, U.; Gottschalck, J.; Mitchell, K.; Meng, C.-J.; Arsenault, K.R.; Cosgrove, B.; Radakovich, J.; Bosilovich, M.; et al. The Global Land Data Assimilation System. Bull. Am. Meteorol. Soc. 2004, 85, 381–394. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Wilson, C.R.; Tapley, B.D.; Save, H.; Cretaux, J.-F. Long-Term and Seasonal Caspian Sea Level Change from Satellite Gravity and Altimeter Measurements. J. Geophys. Res. Solid Earth. 2017, 122, 2274–2290. [Google Scholar] [CrossRef]
- Loomis, B.D.; Rachlin, K.E.; Luthcke, S.B. Improved Earth Oblateness Rate Reveals Increased Ice Sheet Losses and Mass-Driven Sea Level Rise. Geophys. Res. Lett. 2019, 46, 6910–6917. [Google Scholar] [CrossRef]
- Landerer, F. Monthly Estimates of Degree-1 (Geocenter) Gravity Coefficients, Generated from GRACE (04-2002-06/2017) and GRACE-FO (06/2018 Onward) RL06 Solutions, GRACE Technical Note 13; the GRACE Project; NASA Jet Propulsion Laboratory: Pasadena, CA, USA, 2019.
- Peltier, W.R.; Argus, D.F.; Drummond, R. Comment on “An Assessment of the ICE-6G_C (VM5a) Glacial Isostatic Adjustment Model” by Purcell et al. J. Geophys. Res. Solid Earth. 2018, 123, 2019–2028. [Google Scholar] [CrossRef]
- Kim, J. Simulation Study of a Low-Low Satellite-to-Satellite Tracking Mission. Ph.D. Thesis, The University of Texas at Austin, Austin, TX, USA, 2000. [Google Scholar]
- Ditmar, P.; Encarnacao, J.D.T.D.; Farahani, H.H. Understanding Data Noise in Gravity Field Recovery on the Basis of Inter-Satellite Ranging Measurements Acquired by the Satellite Gravimetry Mission GRACE. J. Geodesy. 2011, 86, 441–465. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Q.; Guo, J.; Hu, Z.; Shi, C.; Liu, J.; Cai, H.; Liu, X. GRACE Gravity Field Modeling With an Investigation on Correlation Between Nuisance Parameters and Gravity Field Coefficients. Adv. Space Res. 2011, 47, 1833–1850. [Google Scholar] [CrossRef]
- Liu, X.; Ditmar, P.; Siemes, C.; Slobbe, D.C.; Revtova, E.; Klees, R.; Riva, R.E.M.; Zhao, Q. DEOS Mass Transport Model (DMT-1) Based on GRACE Satellite Data: Methodology and Validation. Geophys. J. Int. 2010, 181, 769–788. [Google Scholar] [CrossRef] [Green Version]
- Werth, S.; Güntner, A. Calibration of a Global Hydrological Model with GRACE Data. In System Earth via Geodetic-Geophysical Space Techniques; Springer: Berlin/Heidelberg, Germany, 2010; pp. 417–426. [Google Scholar]
- Bi, H.; Ma, J.; Zheng, W.; Zeng, J. Comparison of Soil Moisture in GLDAS Model Simulations and in Situ Observations over the Tibetan Plateau. J. Geophys. Res. Atmos. 2016, 121, 2658–2678. [Google Scholar] [CrossRef] [Green Version]
- Scanlon, B.R.; Zhang, Z.; Save, H.; Sun, A.Y.; Schmied, H.M.; Van Beek, L.P.H.; Wiese, D.N.; Wada, Y.; Long, D.; Reedy, R.C.; et al. Global Models Underestimate Large Decadal Declining and Rising Water Storage Trends Relative to GRACE Satellite Data. Proc. Natl. Acad. Sci. USA 2018, 115, E1080–E1089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sneeuw, N. A Semi-Analytical Approach to Gravity Field Analysis from Satellite Observations. PhD Thesis, Technische Universität München, Munich, Germany, 2000. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Force Model | Source | Description |
|---|---|---|
| Static earth gravity field | GGM05C | Degree/order 360 |
| Third-body perturbation | JPL DE430 | Newtonian point mass model for the Sun, Moon and planets |
| Solid earth tide | IERS 2010 | Degree 2, 3, and 4, including frequency independent and frequency dependent terms |
| Ocean tide | EOT11a | Degree/order 120, including 18 major waves and 238 secondary waves |
| Air tide | Ray and Ponte [50] | S1 and S2, degree/order 30 |
| Solid earth pole tide | IERS 2010 | C21 and S21, linear model for the mean pole |
| Ocean pole tide | Desai [51] | Degree/order 100 |
| General relativity | IERS 2010 | Sun and Moon |
| Non-tidal atmosphere and ocean dealiasing | AOD1B RL06 | 3 h data, degree/order 180 |
| Month | RMS Differences (cm) | Ranges of RMS Differences (cm) | ||
|---|---|---|---|---|
| GPD vs. CSR | GPD vs. JPL | GPD vs. GSFC | ||
| January 2005 | 6.31 | 7.44 | 6.76 | 5.51–6.21 |
| April 2005 | 6.18 | 7.25 | 5.42 | 5.87–6.75 |
| July 2005 | 6.14 | 6.42 | 4.85 | 4.90–6.13 |
| October 2005 | 6.72 | 7.93 | 5.46 | 5.67–6.70 |
| Basins | GPD Mascon (cm) | CSR RL06M (cm) | JPL RL06M (cm) | GSFC Mascon (cm) | CSR RL06SH (cm) | |
|---|---|---|---|---|---|---|
| Amplitudes | Amazon | 19.69 ± 1.42 | 19.29 ± 1.42 | 20.34 ± 1.50 | 20.17 ± 1.38 | 15.06 ± 1.12 |
| Parana | 7.59 ± 1.18 | 6.04 ± 1.14 | 6.82 ± 1.16 | 6.84 ± 1.10 | 4.70 ± 0.92 | |
| Orinoco | 18.19 ± 1.96 | 19.81 ± 2.11 | 20.07 ± 2.12 | 20.13 ± 1.87 | 15.06 ± 1.55 | |
| Tocantins | 21.46 ± 2.02 | 21.44 ± 1.95 | 22.19 ± 2.06 | 21.48 ± 1.57 | 16.82 ± 1.51 | |
| San Francisco | 9.85 ± 1.48 | 9.35 ± 1.59 | 9.32 ± 1.58 | 9.87 ± 1.12 | 6.84 ± 1.29 | |
| Colorado | 3.19 ± 1.08 | 6.87 ± 1.09 | 4.73 ± 1.16 | 3.93 ± 0.80 | 3.29 ± 0.93 | |
| Rio Pamaiba | 13.50 ± 2.18 | 14.02 ± 2.20 | 13.35 ± 2.33 | 14.36 ± 1.87 | 9.17 ± 1.75 | |
| Salado | 1.38 ± 1.45 | 2.01 ± 1.31 | 0.69 ± 1.23 | 1.66 ± 1.19 | 2.63 ± 1.10 | |
| Trends | Amazon | 1.08 ± 0.58 | 0.61 ± 0.58 | 0.67 ± 0.61 | 0.55 ± 0.56 | 0.40 ± 0.46 |
| Parana | 0.93 ± 0.52 | 0.50 ± 0.49 | 0.42 ± 0.50 | 0.20 ± 0.46 | 0.24 ± 0.38 | |
| Orinoco | −0.21 ± 0.80 | −0.95 ± 0.86 | −0.96 ± 0.87 | −0.71 ± 0.76 | −0.76 ± 0.63 | |
| Tocantins | −0.34 ± 0.82 | −0.11 ± 0.79 | −0.21 ± 0.84 | −0.60 ± 0.64 | −0.06 ± 0.61 | |
| San Francisco | −0.48 ± 0.61 | −1.24 ± 0.65 | −1.10 ± 0.64 | −1.19 ± 0.46 | −0.69 ± 0.53 | |
| Colorado | −1.48 ± 0.44 | −2.66 ± 0.44 | −2.83 ± 0.47 | −2.52 ± 0.33 | −1.38 ± 0.38 | |
| Rio Pamaiba | 1.79 ± 0.89 | 1.06 ± 0.90 | 1.30 ± 0.95 | 1.20 ± 0.77 | 0.78 ± 0.72 | |
| Salado | −1.40 ± 0.59 | −1.88 ± 0.54 | −1.90 ± 0.50 | −2.04 ± 0.48 | −1.42 ± 0.45 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, B.; Li, Q.; Chen, J.; Luo, Z.; Zhou, H. Improved Estimation of Regional Surface Mass Variations from GRACE Intersatellite Geopotential Differences Using a Priori Constraints. Remote Sens. 2020, 12, 2553. https://doi.org/10.3390/rs12162553
Zhong B, Li Q, Chen J, Luo Z, Zhou H. Improved Estimation of Regional Surface Mass Variations from GRACE Intersatellite Geopotential Differences Using a Priori Constraints. Remote Sensing. 2020; 12(16):2553. https://doi.org/10.3390/rs12162553
Chicago/Turabian StyleZhong, Bo, Qiong Li, Jianli Chen, Zhicai Luo, and Hao Zhou. 2020. "Improved Estimation of Regional Surface Mass Variations from GRACE Intersatellite Geopotential Differences Using a Priori Constraints" Remote Sensing 12, no. 16: 2553. https://doi.org/10.3390/rs12162553
APA StyleZhong, B., Li, Q., Chen, J., Luo, Z., & Zhou, H. (2020). Improved Estimation of Regional Surface Mass Variations from GRACE Intersatellite Geopotential Differences Using a Priori Constraints. Remote Sensing, 12(16), 2553. https://doi.org/10.3390/rs12162553