Benefits and Lessons Learned from the Sentinel-3 Tandem Phase

 ,
,  , ,
, ,  , , ,
, , ,  ,
,
Abstract
:
1. Introduction
- SRAL, the SAR radar altimeter working in bands Ku/C
- MWR, the microwave radiometer, which complements SRAL to perform the sea surface topography mission
- SLSTR, the sea and land surface temperature radiometer, with channels covering VIS, SWIR, and thermal infra-red
- And OLCI, the ocean and land color imager in the VISNIR domain
2. Motivation and Design of the S3B Tandem Phase
2.1. Tandem Inter-Comparisons from a Metrology Point of View
- Traceability of measurements to a stated metrological reference.
- Uncertainty analysis.
- Comparisons of measurements to confirm traceability and validate uncertainty analysis.
- Temporal variations of the geophysical signal;
- Variations of the observation geometry;
- And variations of atmospheric conditions.
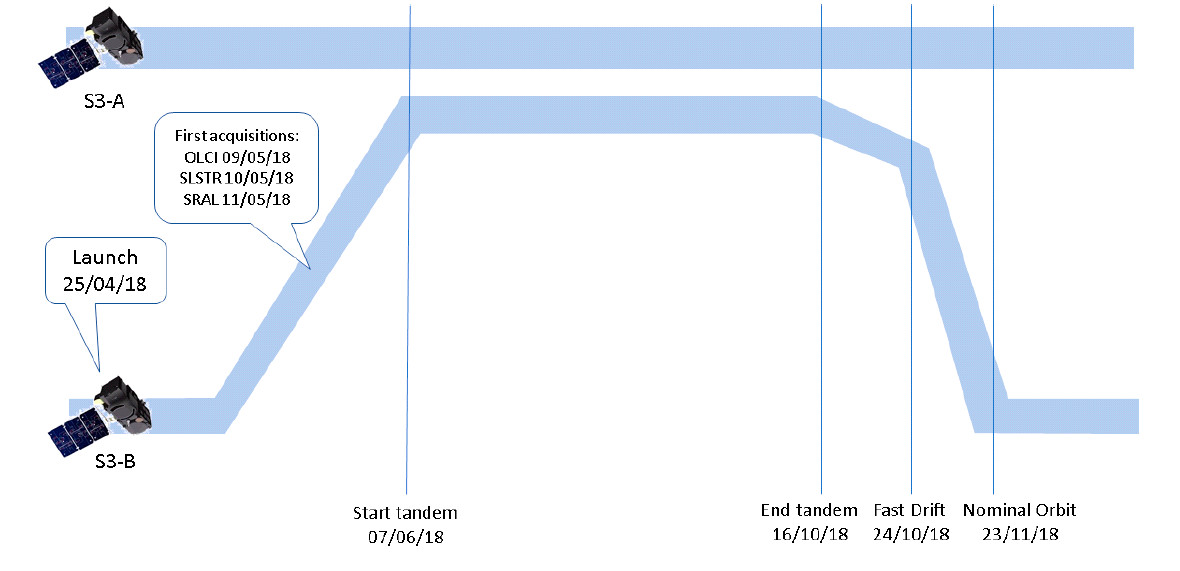
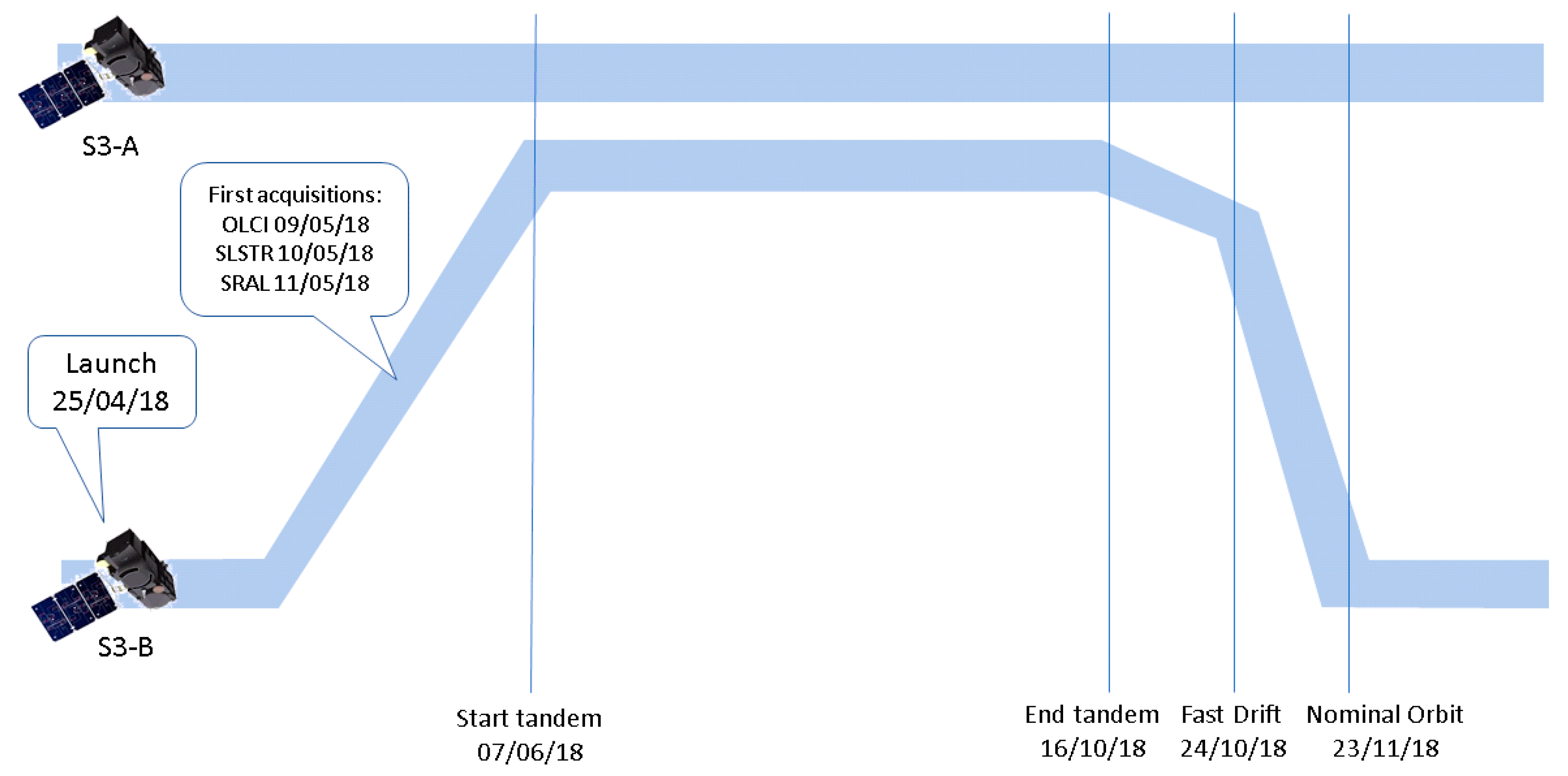
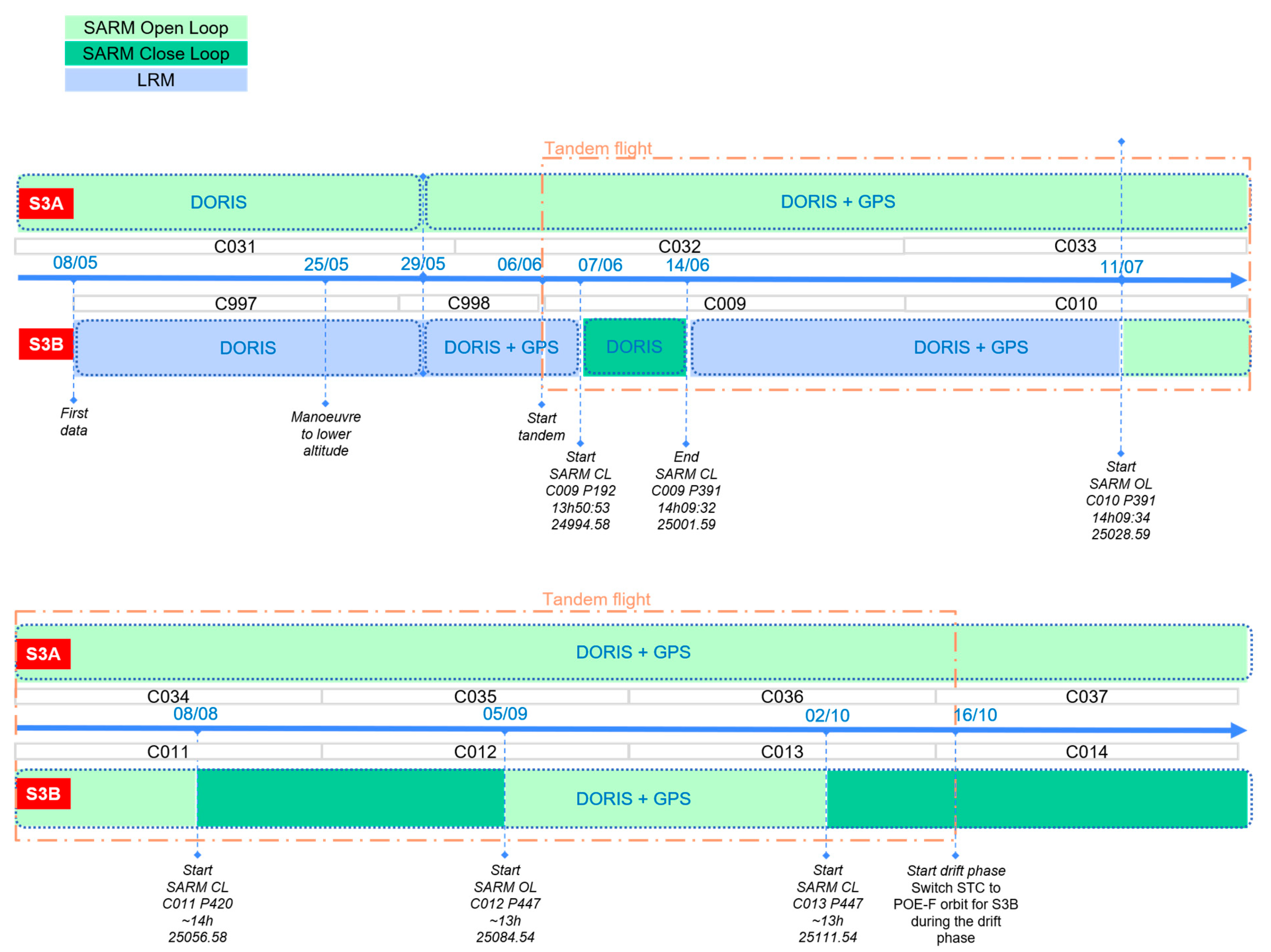
2.2. Timeline of the Sentinel-3B Tandem Phase
3. The Sentinel-3 Tandem for Climate Study
3.1. Study Objectives
- Supporting commissioning of Sentinel-3B operations, by allowing straightforward comparisons with a similar operational satellite
- Understanding the impact of different instrument operations modes: this has been especially important for the altimetry mission
- Understanding inter-satellite differences, assessing harmonization needs and requirements; this point being the core objective of the tandem phase
- Validating uncertainties
- Exploiting differences in the geophysical signal, due either to the time lag during the tandem phase or the differences in geometry during the drift phase
3.2. Data Archive
3.3. Main Results
4. Methodology for Inter-Comparisons
5. Understanding the Impact of Instrument Operating Modes
5.1. SRAL Acquisition Mode Comparisons for Sea Surface Height
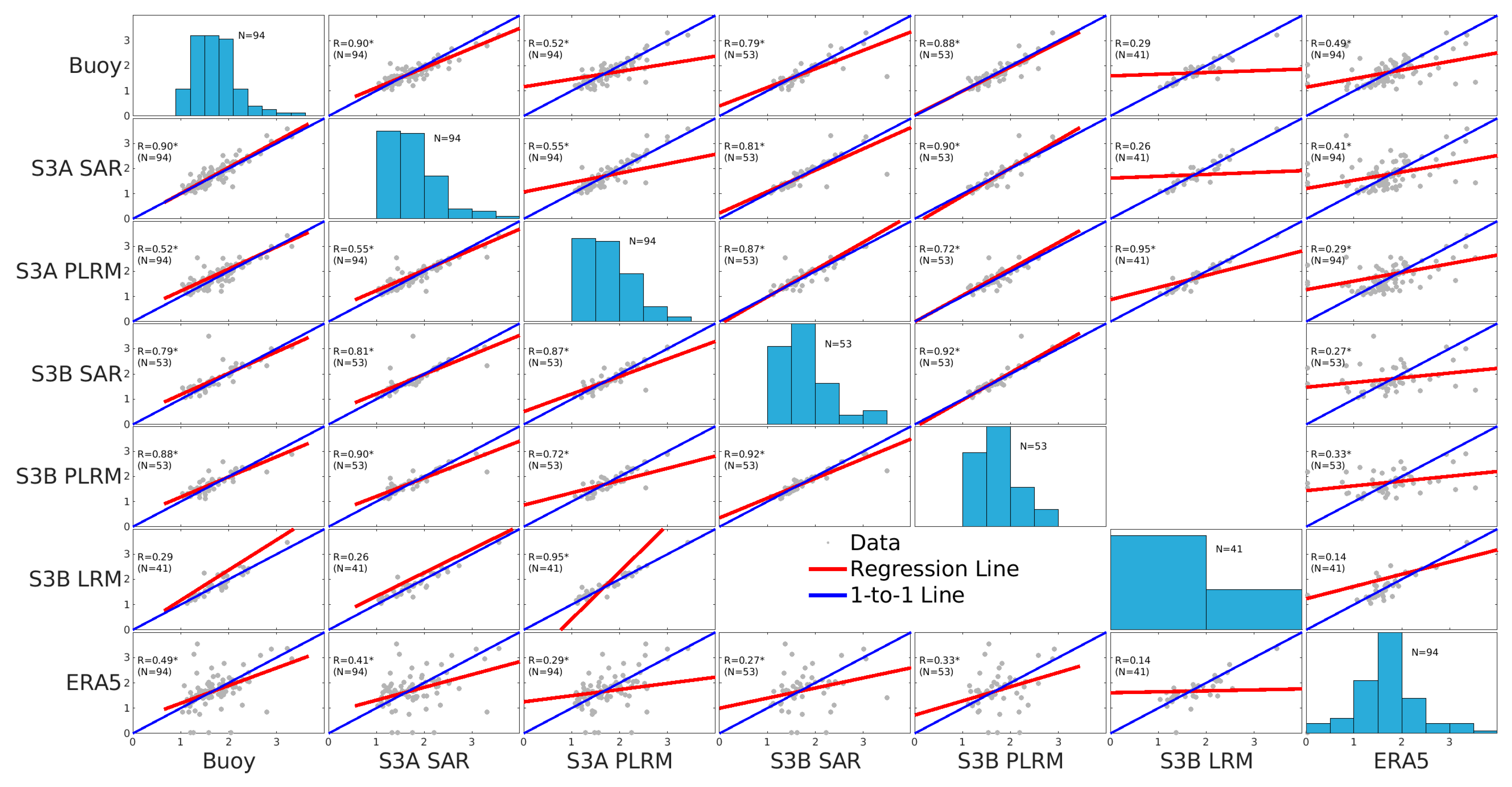
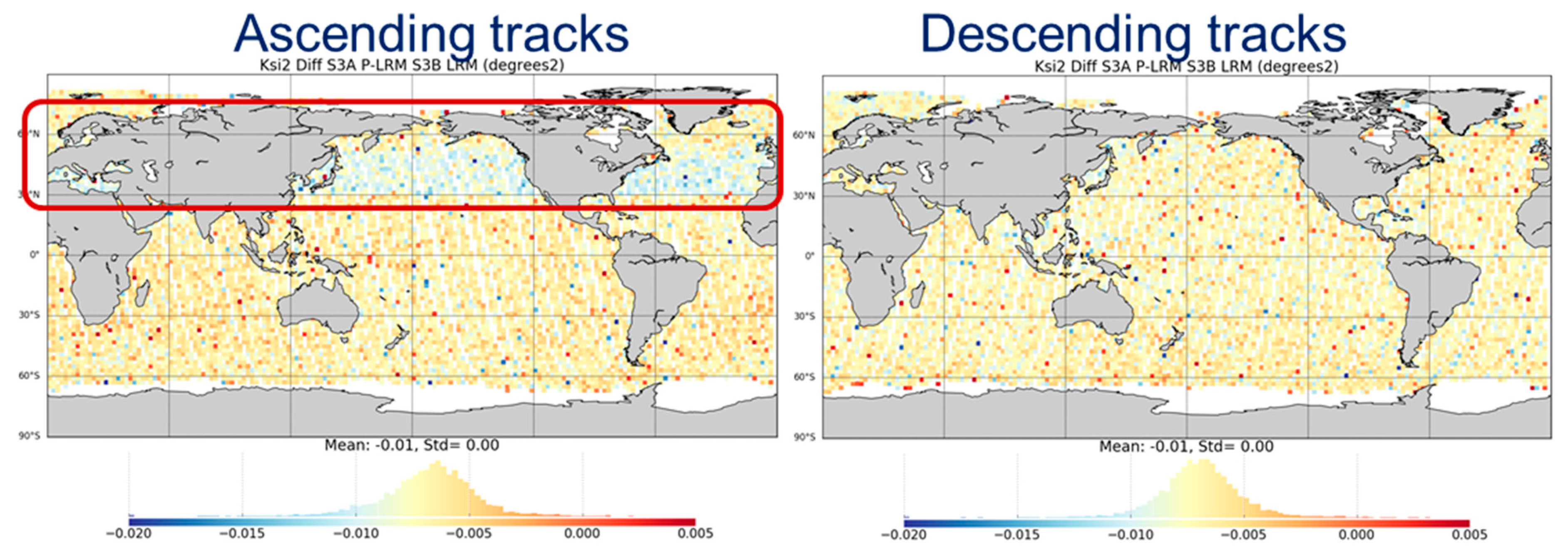
5.2. SRAL Acquisition Mode Comparisons for Sea State
6. Understanding Inter-Sensor Differences
6.1. SRAL Differences Due to Sensor Mis-pointing
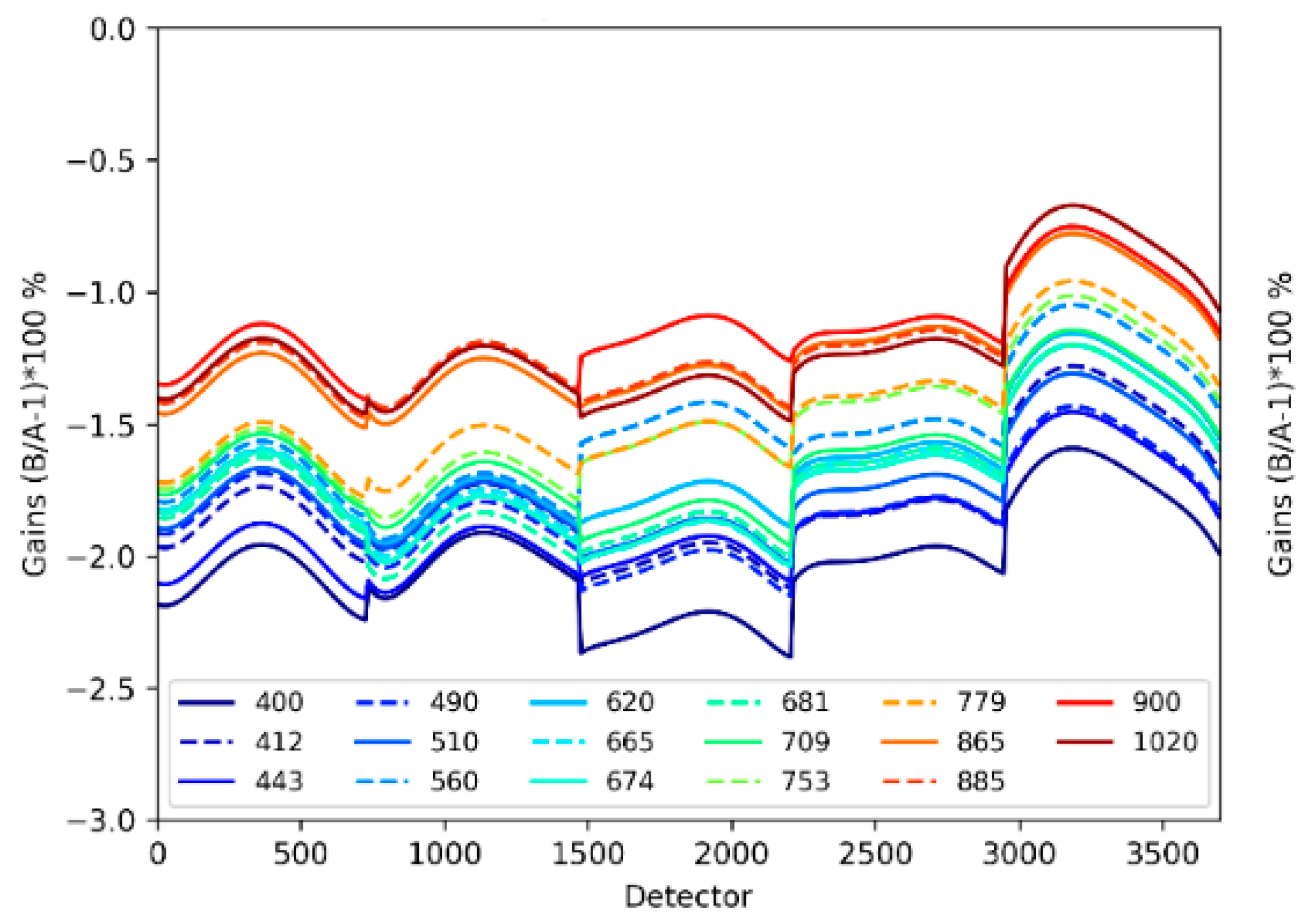
6.2. OLCI Radiometric Differences and Homogenization
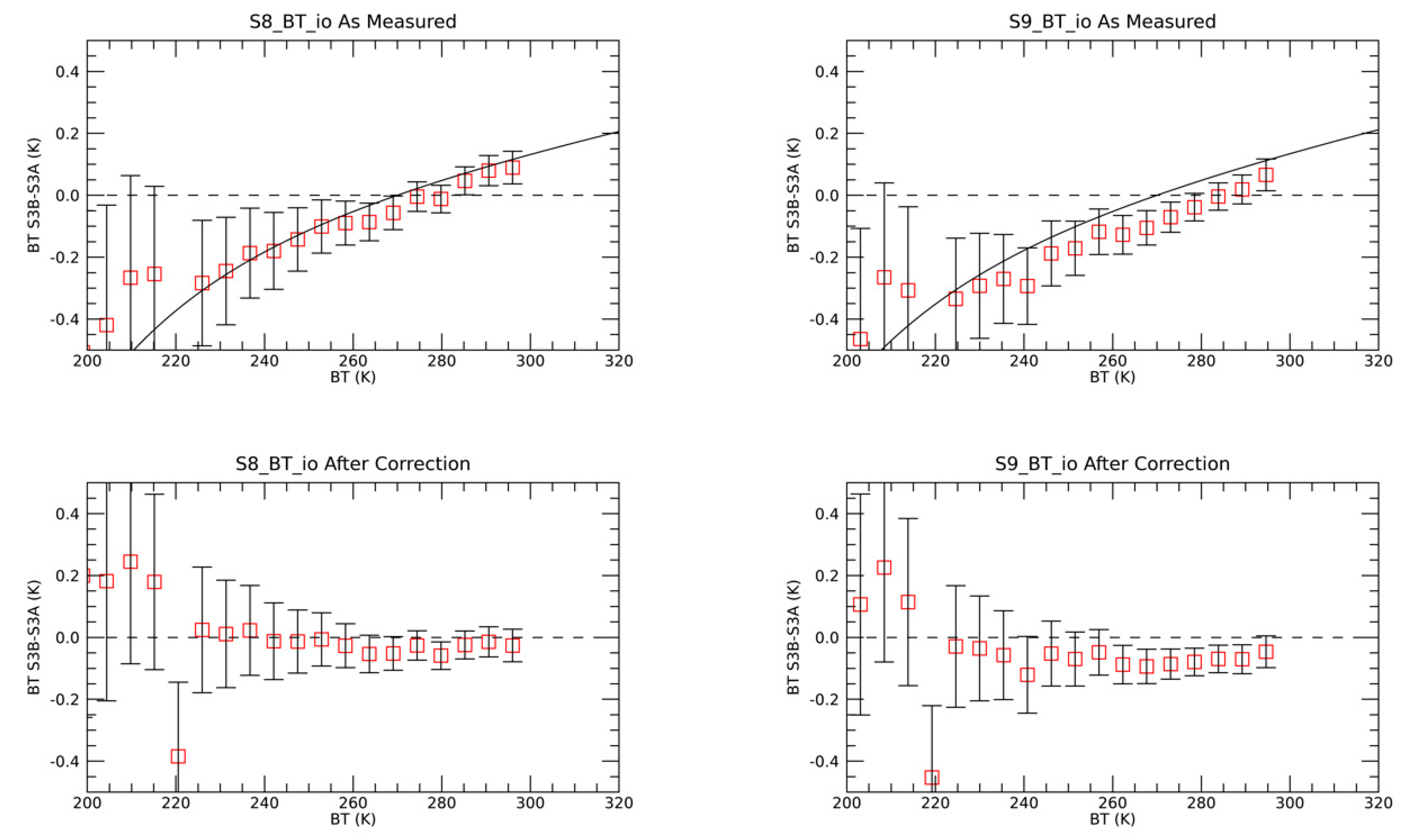
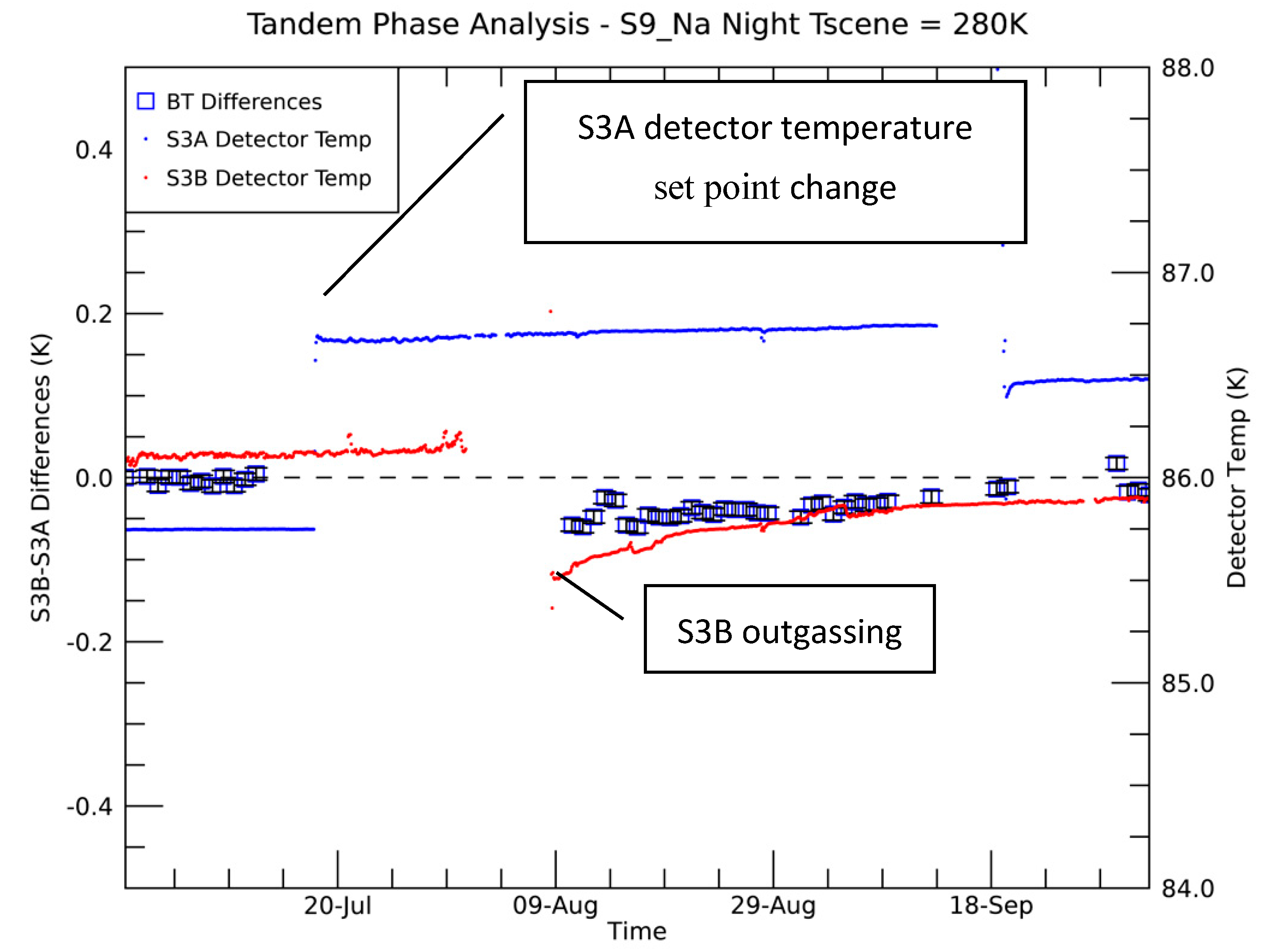
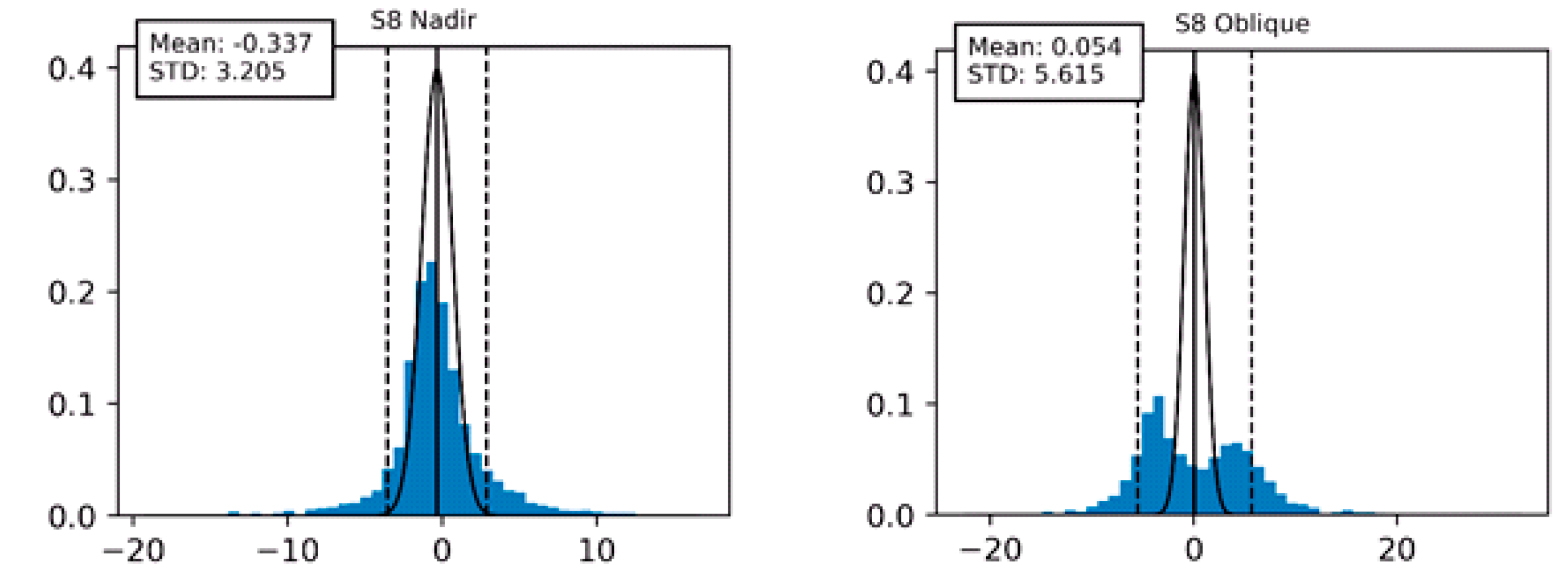
6.3. SLSTR Inter-Comparisons
- Sensor-to-sensor differences. Results are generally found to be within the expected uncertainties, except for channels S8 and S9 in the oblique view, which show differences vs. temperature (Figure 6). These results are consistent with the presence of an internal stray light effect observed during the SLSTR pre-launch calibration campaign [25]. The results of this tandem-phase analysis show the potential benefits of a stray-light correction.
- Sensitivity to total column water vapor can indicate an issue with sensor spectral response function characterization. No apparent sensitivity is found in the tandem phase data.
7. Assessment of Measurement Uncertainties
8. Impact on Climate Change Monitoring
8.1. Impact of Global Mean Sea Level Bias Uncertainty on Trend Detection
- An “ideal” tandem scenario with all cycles performed in SAR open-loop (OL)
- A tandem phase with switches to SAR closed-loop modes
- A tandem phase with additional switches to low-resolution mode (LRM): this is the actual Sentinel-3B scenario
- Estimation from data acquired on the Sentinel-3B final orbit (post-tandem).
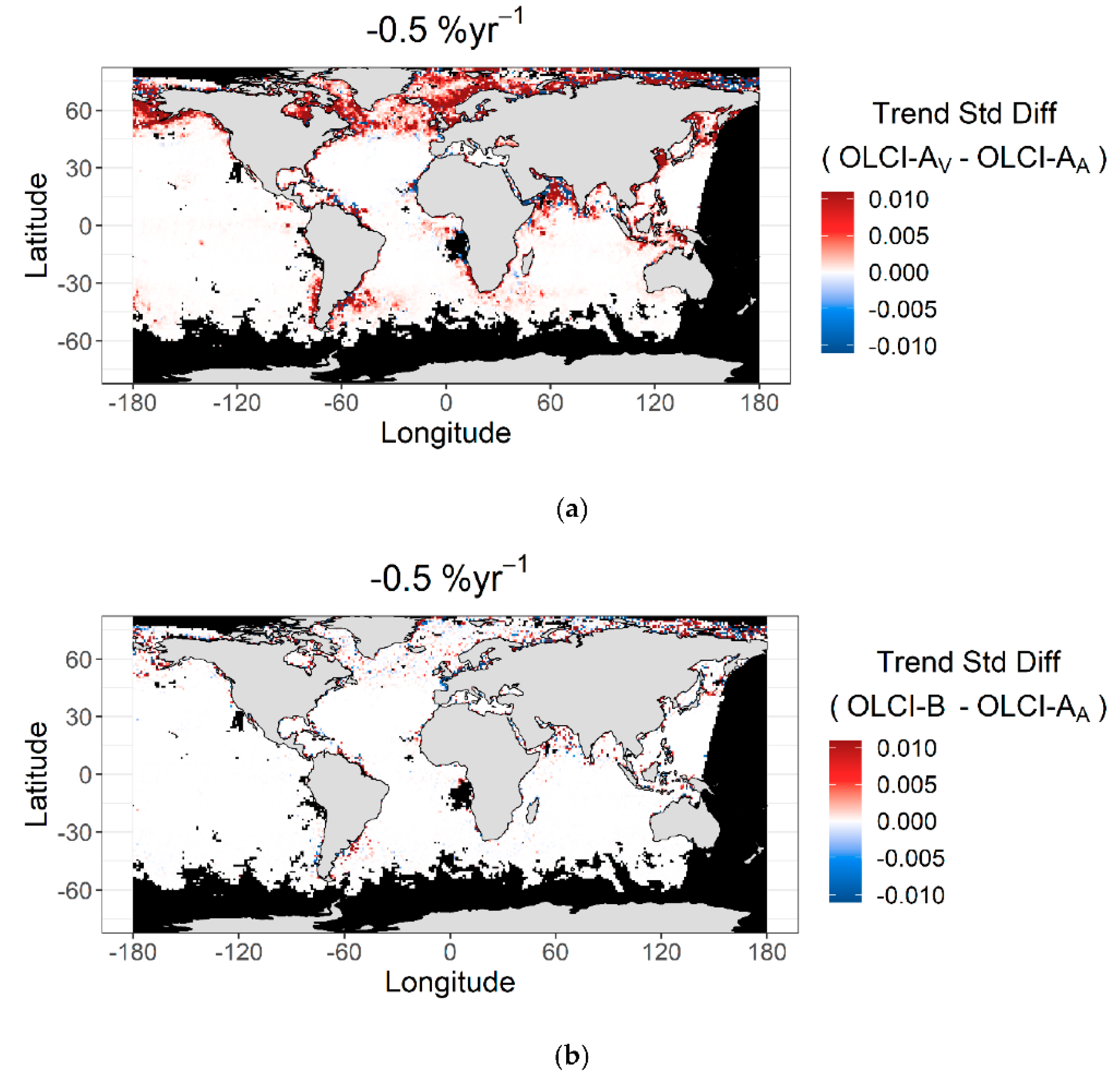
8.2. Impact of OLCI Uncertainties on Chlorophyll Trend Detection Capabilities
- A baseline time series representative of seasonal effects is created by regridding and de-trending ESA OC-CCI v3.1 products;
- “Observational” noise is added by sampling a zero-mean distribution whose variance matches the one computed for each grid cell in the tandem data;
- Finally, a global trend in the range of ±2 %yr−1 is added to the time series.
9. Geophysical Signal and Geometric Differences
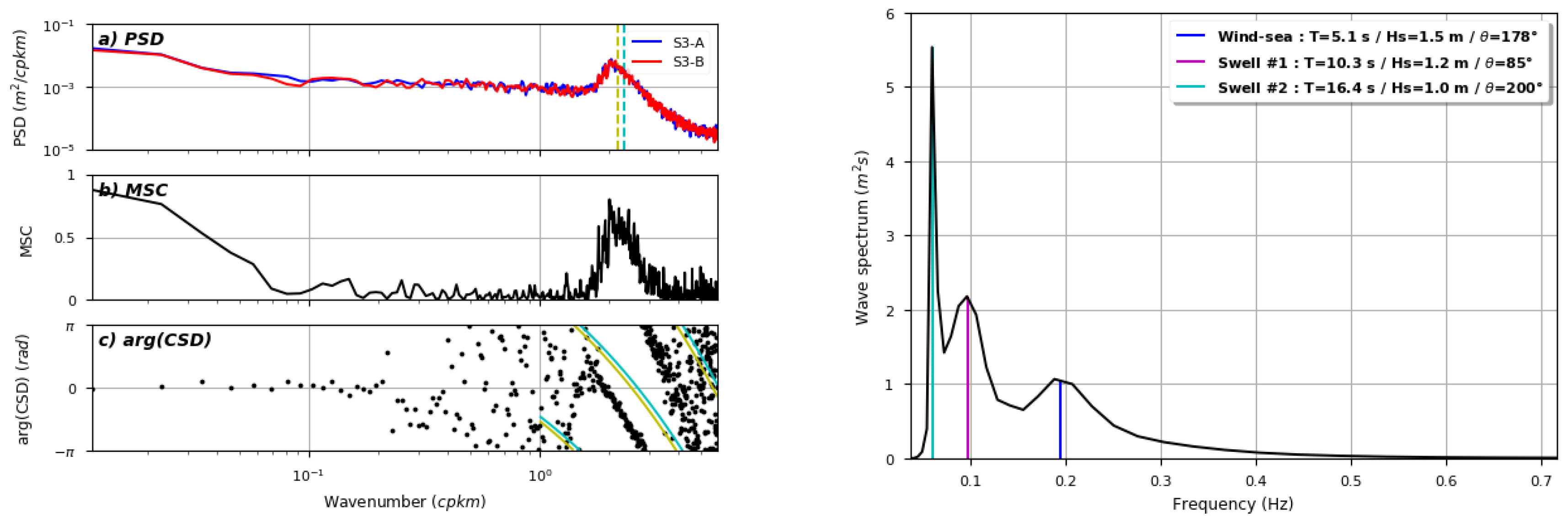
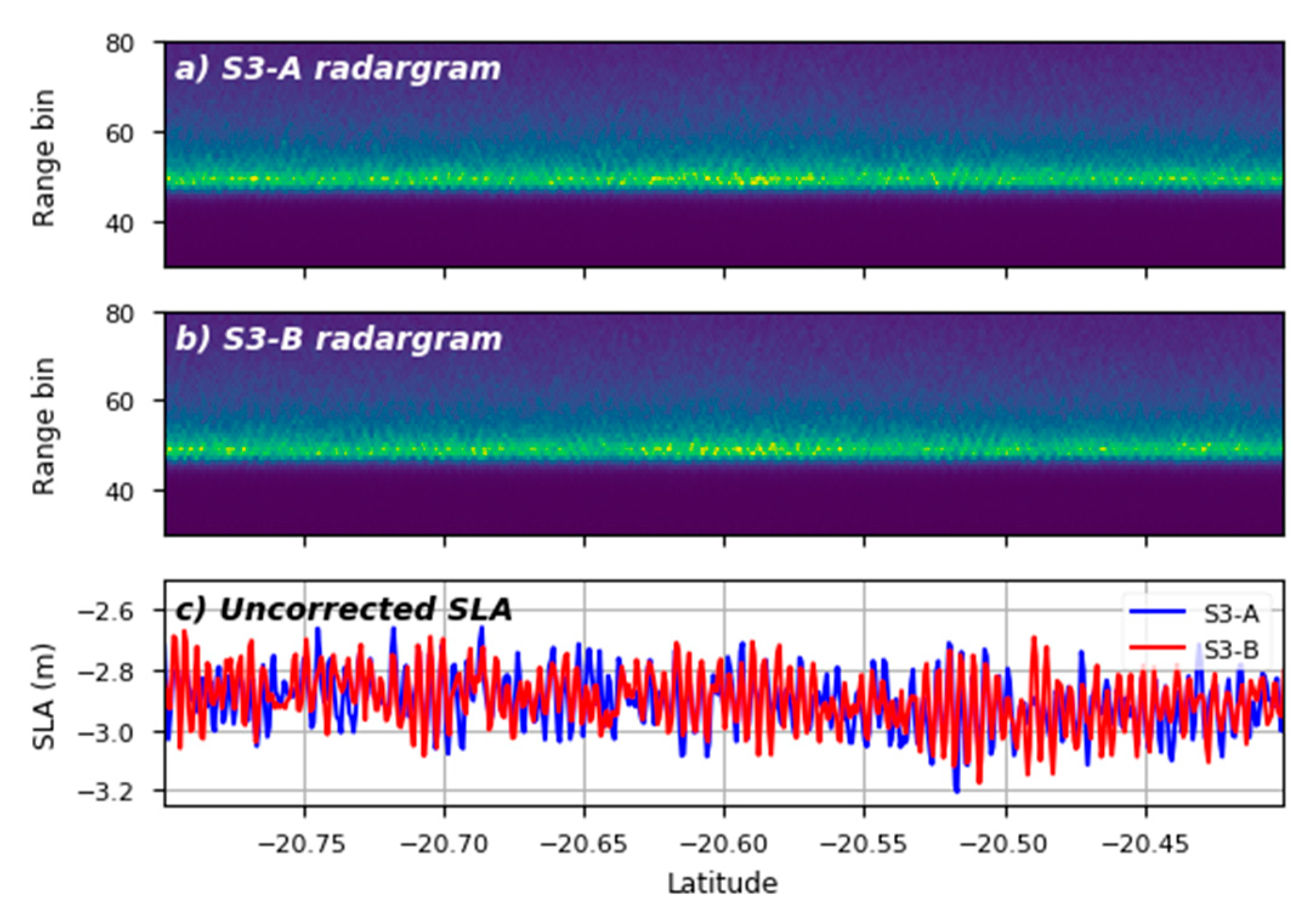
9.1. Impact of Swell on SAR Altimetry
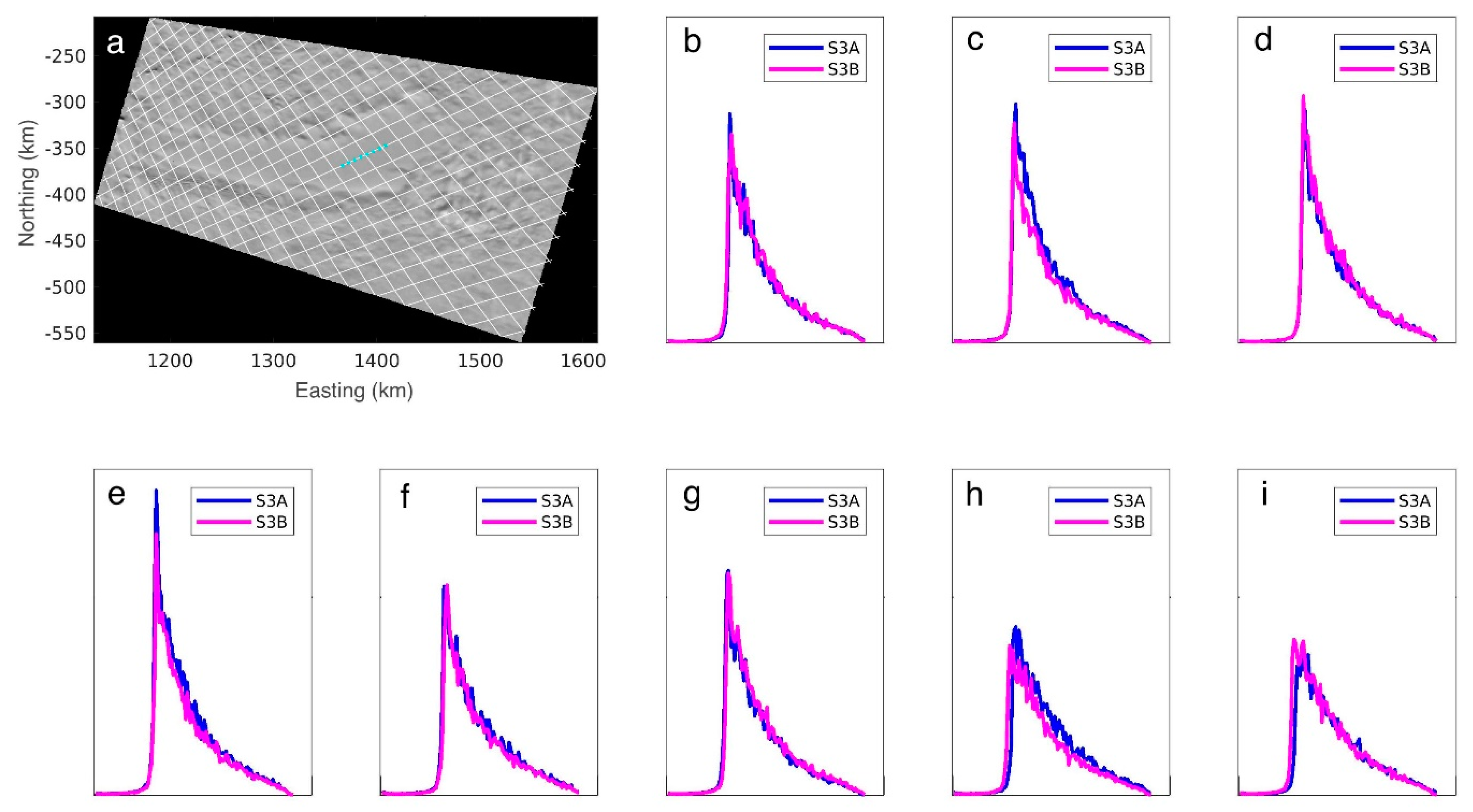
9.2. SRAL Waveform Consistency over Land Ice
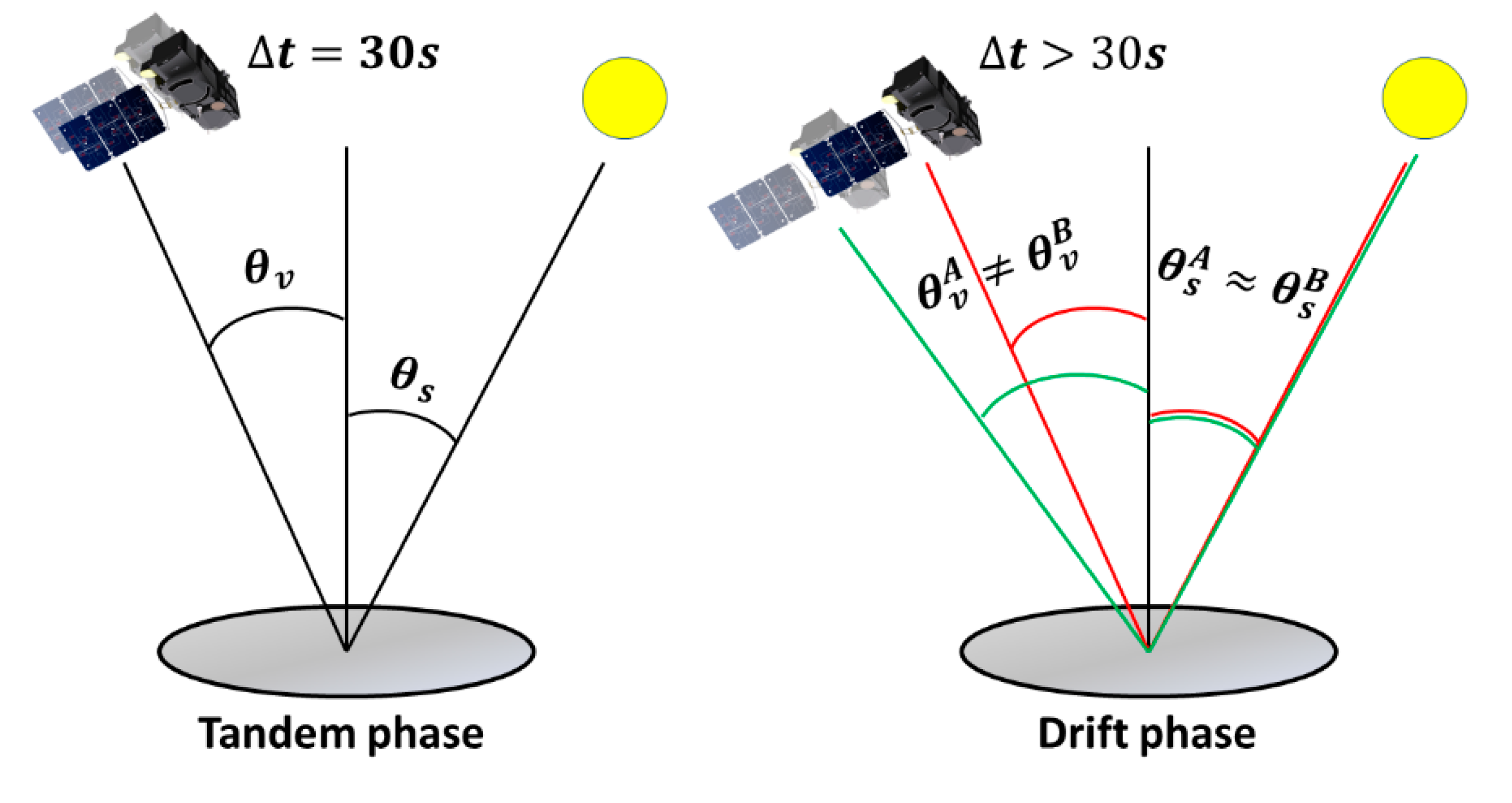
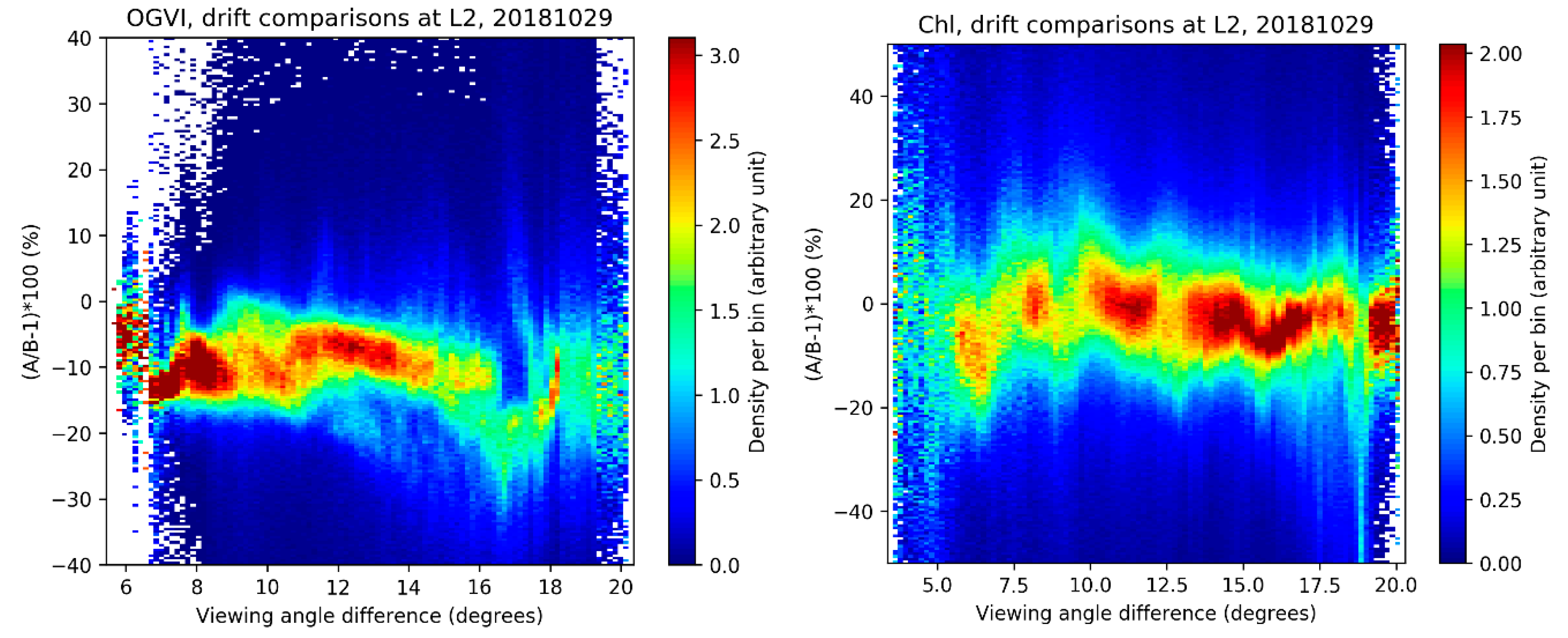
9.3. Impact of Viewing Geometry on OLCI Level2 Products
10. Discussion
11. Conclusions and Recommendations for Future Tandem Phases
- A tandem phase should be implemented for satellites operating in constellations whenever possible. This recommendation applies to all types of earth observation missions, as the benefits are found to be equally important for all Sentinel-3 instruments.
- The duration of the tandem phase must be adapted to the needs of the particular mission. Altimetry missions require a relatively long tandem phase covering several observation cycles. For Sentinel-3C, at least 4 cycles of tandem operations in SAR open-loop mode are considered necessary to reduce the uncertainty on the bias on the global mean sea level to an acceptable level. For the optical mission, the duration shall include enough time for the instrument to reach a stabilized state after launch (radiometrically and geometrically).
- A time-lag of 30 s between the two satellites is considered appropriate for all analyses. Altimetry studies would probably benefit from several phases with different time lags, in order to assess the impact of different oceanic effects on measurements. Measurements acquired during the post-tandem drift phase can be used to analyze the impact of viewing geometry for optical instruments.
- A data reprocessing campaign at the end of the commissioning should be planned in order to obtain the best possible data from the commissioning period, corrected for, e.g., inaccuracies in pre-launch characterization, post-launch effects, etc.
- Whenever possible, inter-satellite differences should be compared to uncertainty assessed from models and budgets.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57, ISSN 0034-4257. [Google Scholar] [CrossRef]
- Drusch, M.; Moreno, J.; Del Bello, U.; Franco, R.; Goulas, Y.; Huth, A.; Kraft, S.; Middleton, E.M.; Miglietta, F.; Mohammed, G.; et al. The FLuorescence EXplorer Mission Concept—ESA’s Earth Explorer 8. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1273–1284, no. 3. [Google Scholar] [CrossRef]
- Willis, P.; Haines, B.; Bar-Sever, Y.; Bertiger, W.; Muellershoen, R.J.; Kuang, D.; Desai, S. Topex/Jason combined GPS/DORIS orbit determination in the tandem phase. Adv. Space Res. 2003, 31, 1941–1946. [Google Scholar] [CrossRef]
- Le Traon, P.Y.; Dibarboure, G. Illustration of the contribution of the tandem mission to mesoscale studies. Mar. Geod. 2004, 27, 3–13. [Google Scholar] [CrossRef]
- Dibarboure, G.; Pujol, M.-I.; Briol, F.; Le Traon, P.Y.; Larnicol, G.; Picot, N.; Mertz, F.; Ablain, M. Jason-2 in DUACS: Updated system description, first tandem results and impact on processing and products. Mar. Geod. 2011, 34, 214–241. [Google Scholar] [CrossRef] [Green Version]
- Biancamaria, S.; Schaedele, T.; Blumstein, D.; Frappart, F.; Boy, F.; Desjonquères, J.-D.; Pottier, C.; Blarel, F.; Niño, F. Validation of Jason-3 tracking modes over French rivers. Remote Sens. Environ. 2018, 209, 77–89. [Google Scholar] [CrossRef] [Green Version]
- Teillet, P.M.; Barker, J.L.; Markham, B.L.; Irish, R.R.; Fedosejevs, G.; Storey, J.C. Radiometric cross-calibration of the Landsat-7 ETM+ and Landsat-5 TM sensors based on tandem data sets. Remote Sens. Environ. 2001, 78, 39–54, Issues 1–2, ISSN 0034-4257. [Google Scholar] [CrossRef] [Green Version]
- Sentinel-3 Tandem for Climate Project Website. Available online: http://s3tandem.eu (accessed on 18 August 2020).
- Mittaz, J.; Merchant, C.J.; Woolliams, E.R. Applying principles of metrology to historical Earth observations from satellites. Metrologia 2019, 56, 032002, Number 3. [Google Scholar] [CrossRef]
- Ablain, M.; Cazenave, A.; Larnicol, G.; Balmaseda, M.; Cipollini, P.; Faugère, Y.; Fernandes, M.J.; Henry, O.; Johannessen, J.A.; Knudsen, P.; et al. Improved sea level record over the satellite altimetry era (1993–2010) from the Climate Change Initiative project. Ocean Sci. 2015, 11, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Zawadzki, L.; Ablain, M.; Thibaut, P.; Prandi, P. Estimating a Drift in TOPEX—A Global Mean Sea Level Using Poseidon—1 Measurements; paper presented at the OSTST meeting; OSTST: La Rochelle, France, November 2016. [Google Scholar]
- Sentinel-3 Tandem Mission Activity Timeline. Available online: https://s3tandem.eu/?mdocs-file=410 (accessed on 18 August 2020).
- C-TEP Data Exploitation Platform. Available online: https://c-tep.eu/geobrowser (accessed on 18 August 2020).
- Sentinel-3 Tandem Altimetry Archive. Available online: https://web-s3tc.dias.groupcls.com (accessed on 18 August 2020).
- Sentinel-3 Product Notice. Available online: https://sentinel.esa.int/documents/247904/2753172/Sentinel-3-Product-Notice-STM-Level-2-Land (accessed on 17 August 2020).
- Rieu, P.; Moreau, T.; Cadier, E.; Raynal, M.; Clerc, S.; Donlon, C.; Borde, F.; Boy, F.; Maraldi, C. Exploiting the Sentinel-3 Tandem Phase Dataset and Azimuth Oversampling to Better Characterize the Sensitivity of SAR Altimeter Sea Surface Height to Long Ocean Waves. Adv. Space Res. 2020. submitted for publication. [Google Scholar]
- McMillan, M.; Muir, A.; Shepherd, A.; Donlon, C. Assessment of Sentinel-3 Tandem Phase Altimetry over Ice Sheets. Cryosphere 2020. submitted for publication. [Google Scholar]
- Banks, C.; Gommenginger, C.; Calafat, F.M.; Dayoub, N.; Snaith, H.M.; Wimmer, W.; Hammond, M.; Timmermans, B. Evaluation of Sea State Products from the Sentinel-3A and Sentinel-3B Tandem Phase. In Proceedings of the Ocean Sciences meeting, San Diego, CA, USA, 16–21 February 2020. [Google Scholar]
- Banks, C.; Hammond, M.; Wimmer, W.; Snaith, H.; Gommenginger, C. Assessment of Sentinel-3A and Sentinel-3B sea state products during the tandem phase using in situ and reanalysis data. 2020. in preparation. [Google Scholar]
- Picard, B.; Bennartz, R.; Fell, F.; Denneulin, M.-L.; Siméon, M.; Donlon, C. Assessment of the ”Zero-Bias Line” Homogenization 1 Method for Microwave Radiometers Using Sentinel-3A and Sentinel-3B Tandem Phase. Remote Sens. 2020. submitted for publication. [Google Scholar]
- Lamquin, N.; Clerc, S.; Bourg, L.; Donlon, C. OLCI A/B tandem phase analysis, part 1: Level 1 homogenisation and harmonisation. Remote Sens. 2020, 12, 1804. [Google Scholar] [CrossRef]
- Lamquin, N.; Clerc, S.; Bourg, L.; Donlon, C. OLCI A/B tandem phase analysis, part 3: Post-tandem monitoring of cross-calibration from statistics of Deep Convective Clouds observations. Remote Sens. 2020. in revision. [Google Scholar]
- Lamquin, N.; Deru, A.; Clerc, S.; Bourg, L.; Donlon, C. OLCI A/B Tandem Phase Analysis, Part 2: Benefits of Sensors Harmonization for Level 2 Products. 2020. in revision. [Google Scholar] [CrossRef]
- Hammond, M.L.; Henson, S.A.; Lamquin, N.; Clerc, S.; Donlon, C. Assessing the Effect of Tandem Phase Sentinel 3 OLCI Sensor Uncertainty on the Estimation of Potential Ocean Chlorophyll Trend. Remote Sens. 2020, 12, 2522. [Google Scholar] [CrossRef]
- Smith, D.L.; Barillot, M.; Bianchi, S.; Brandani, F.; Coppo, P.M.; Etxaluze, M.; Frerick, J.; Kirschstein, S.; Lee, A.; Maddison, B.J.; et al. Sentinel-3A/B SLSTR Pre-Launch Calibration of the Thermal Infrared Channels. Remote Sens. 2020, 12, 2510. [Google Scholar] [CrossRef]
- Samuel, E.; Hunt; Jonathan, P.D.; Mittaz; David, L.; Smith; Polehampton, E.; Yemelyanova, R.; Emma; Woolliams, R.; et al. Level 1 and Level 2 Comparison of the Sentinel-3A/B SLSTR Tandem Phase Data Using Metrological Principles. Remote Sens. 2020. in revision. [Google Scholar]
- Tokmakian, R.; Challenor, P.G. On the joint estimation of model and satellite sea surface height anomaly errors. Ocean Model. 1999, 1, 39–52, no. 1. [Google Scholar] [CrossRef]
- O’Carroll, A.G.; Eyre, J.R.; Saunders, R.W. Three-Way Error Analysis between AATSR, AMSR-E, and In Situ Sea Surface Temperature Observations. J. Atmos. Ocean. Technol. 2008, 25, 1197–1207. [Google Scholar] [CrossRef] [Green Version]
- US National Data Buoy Center. Available online: https://www.ndbc.noaa.gov (accessed on 18 August 2020).
- ERA-5 Data Archive. Available online: https://apps.ecmwf.int/data-catalogues/era5 (accessed on 18 August 2020).
- Richter, A.; Popov, S.V.; Fritsche, M.; Lukin, V.V.; Matveev, A.Y.; Ekaykin, A.A.; Lipenkov, V.Y.; Fedorov, D.V.; Eberlein, L.; Schröder, L.; et al. Height changes over subglacial Lake Vostok, East Antarctica: Insights from GNSS observations (2014). J. Geophys. Res. 2014, 119. [Google Scholar] [CrossRef] [Green Version]
- Schröder, L.; Richter, A.; Fedorov, D.V.; Eberlein, L.; Brovkov, E.V.; Popov, S.V.; Knöfel, C.; Horwath, M.; Dietrich, R.; Matveev, A.Y.; et al. Validation of satellite altimetry by kinematic GNSS in central East Antarctica. Cryosphere 2017, 11, 1111–1130. [Google Scholar] [CrossRef] [Green Version]
- Shuman, C.A.; Zwally, H.J.; Schutz, B.E.; Brenner, A.C.; DiMarzio, J.P.; Suchdeo, V.P.; Fricker, H.A. ICESat Antarctic elevation data: Preliminary precision and accuracy assessment. Geophys. Res. Lett. 2006, 33, L07501. [Google Scholar] [CrossRef]
- McMillan, M.; Muir, A.; Shepherd, A.; Escola, R.; Roca, M.; Aublanc, J.; Thibaud, P.; Restano, M.; Ambrozio, A.; Benveniste, J. Sentinel-3 Delay-Doppler altimetry over Antarctica. Cryosphere 2019, 13, 709–722, no. 2. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Products | Analyses | Outcome and Lessons Learned | References (Paper or Subsection) |
|---|---|---|---|---|
| SRAL | SSH | Signal correlation under different swell conditions | Quantified impact of swell on SAR acquisitions | [16] |
| SRAL | Ice surface height | Comparisons at different sites Triple co-location with IceBridge measurements | Sentinel-3A and B are statistically indistinguishable on land ice. Accuracy ranges from the order of ~0.1 m (inland regions) to ~1 m (coastal regions). | [17] and Section 9.2 |
| SRAL | SWH, WS | Triple collocations with buoys and models Statistics per mode and region | Very good agreement between S3A and S3B | [18,19] and Section 5.2 |
| MWR | BT | Alternative harmonization method | Harmonization accuracy better than 0.5 K obtained | [20] |
| OLCI | L1 | Across-track profiles Statistics per target classes Temporal stability | OLCI-A brighter than OLCI-B After empirical flat-fielding, differences are linearly decreasing with a spectral wavelength Possible non-linearity effects and impact of stray-light correction in camera Homogenization and harmonization prototyped and validated | [21] and Section 6.2 |
| OLCI | L1 over deep convective clouds | Across-track uniformity cross-calibration temporal stability out of tandem | Although not as precise as tandem analyses, independent analysis over DCCs (monthly statistics) allows quantifying (between 0.5% and 1% precision) the relative calibration of OLCI-A and OLCI-B out of tandem phase | [22] |
| OLCI | L2 land and water | Impact of L1 harmonization Impact of spectral response differences Impact of viewing geometry | L1 harmonization more efficient than L2 vicarious calibration for water products OGVI (land product) better aligned after harmonization OTCI mostly sensitive to spectral differences | [23] and Section 9.3 |
| OLCI | L3 water | Trend retrieval on simulated datasets | Trend detection capabilities of the Sentinel-3 constellation confirmed | [24] and Section 8.2 |
| SLSTR | L1 | Sensibility studies (WV, signal linearity) Temporal stability Uncertainty validation | Low differences between SLSTR-A and B nadir view, slightly higher for oblique view Non-linearity effects observed, most likely due to internal background signal Uncertainty under-estimated for oblique view | [25,26] and Section 6.3 |
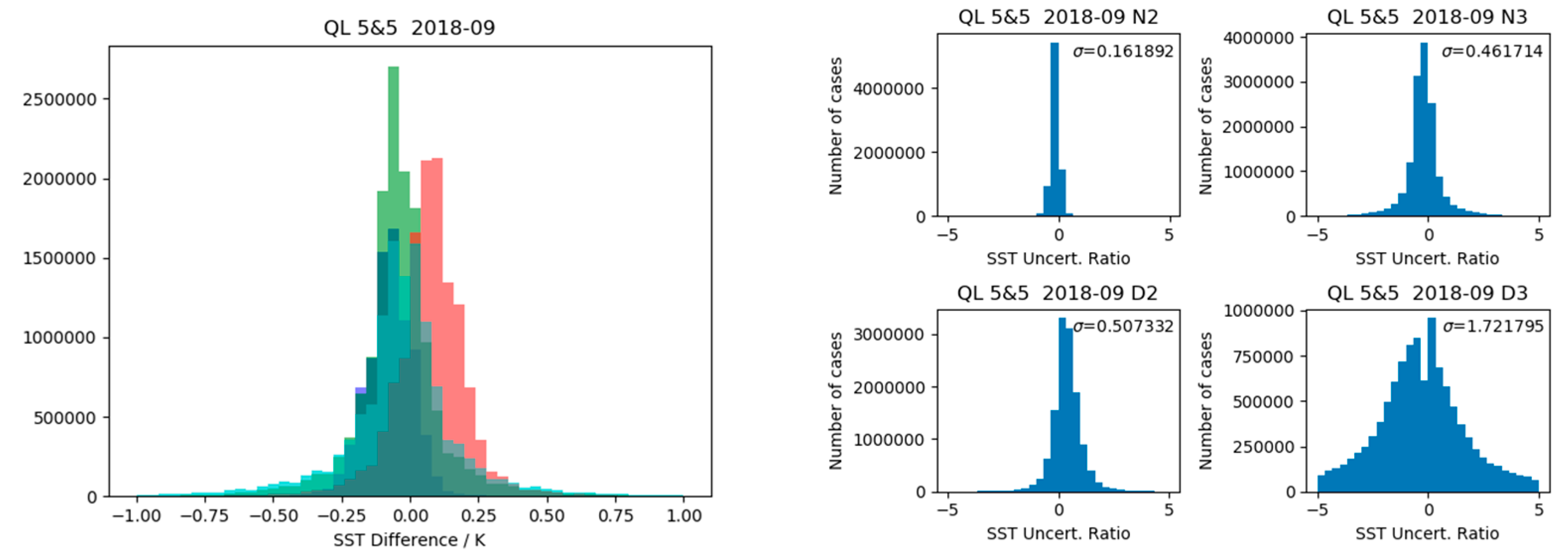
| SLSTR | L2 SST | Uncertainty validation Impact of retrieval algorithm and quality level | The agreement is generally good, with notable differences for some algorithms and quality level | [26] and Section 7 |
| GMSL Bias Uncertainties (2-Sigmas) (mm) | Tandem Phase (5 Cycles) | Final Orbits (5 Cycles) | |||
|---|---|---|---|---|---|
| Sources | Estimation Method | SAR | PLRM | SAR | PLRM |
| Ocean variability (orbit) | CMEMS L4 extraction | 0.06 | 1.1 | ||
| Instrument acquisition modes | GMSL corrections | 2.32 | 1.60 | - | - |
| SSH measurements | Monte Carlo | 0.30 | 0.65 | 0.40 | 0.60 |
| Total uncertainty | 2.34 | 1.72 | 1.16 | 1.24 | |
| Maximum GMSL Trend Uncertainty (2-Sigma) (mm/Year) | SAR | PLRM |
|---|---|---|
| Ideal tandem (5 cycles in SAR OL) | 0.13 | 0.26 |
| Tandem with SAR OL/CL switch | 0.70 | - |
| Tandem with LRM and SAR OL/CL switches (actual S3B tandem) | 0.94 | 0.70 |
| Final orbits | 0.45 | 0.48 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Clerc, S.; Donlon, C.; Borde, F.; Lamquin, N.; Hunt, S.E.; Smith, D.; McMillan, M.; Mittaz, J.; Woolliams, E.; Hammond, M.; et al. Benefits and Lessons Learned from the Sentinel-3 Tandem Phase. Remote Sens. 2020, 12, 2668. https://doi.org/10.3390/rs12172668
Clerc S, Donlon C, Borde F, Lamquin N, Hunt SE, Smith D, McMillan M, Mittaz J, Woolliams E, Hammond M, et al. Benefits and Lessons Learned from the Sentinel-3 Tandem Phase. Remote Sensing. 2020; 12(17):2668. https://doi.org/10.3390/rs12172668
Chicago/Turabian StyleClerc, Sébastien, Craig Donlon, Franck Borde, Nicolas Lamquin, Samuel E. Hunt, Dave Smith, Malcolm McMillan, Jonathan Mittaz, Emma Woolliams, Matthew Hammond, and et al. 2020. "Benefits and Lessons Learned from the Sentinel-3 Tandem Phase" Remote Sensing 12, no. 17: 2668. https://doi.org/10.3390/rs12172668
APA StyleClerc, S., Donlon, C., Borde, F., Lamquin, N., Hunt, S. E., Smith, D., McMillan, M., Mittaz, J., Woolliams, E., Hammond, M., Banks, C., Moreau, T., Picard, B., Raynal, M., Rieu, P., & Guérou, A. (2020). Benefits and Lessons Learned from the Sentinel-3 Tandem Phase. Remote Sensing, 12(17), 2668. https://doi.org/10.3390/rs12172668