Comparison of Filters for Archaeology-Specific Ground Extraction from Airborne LiDAR Point Clouds



Abstract
:1. Introduction
2. Materials and Methods
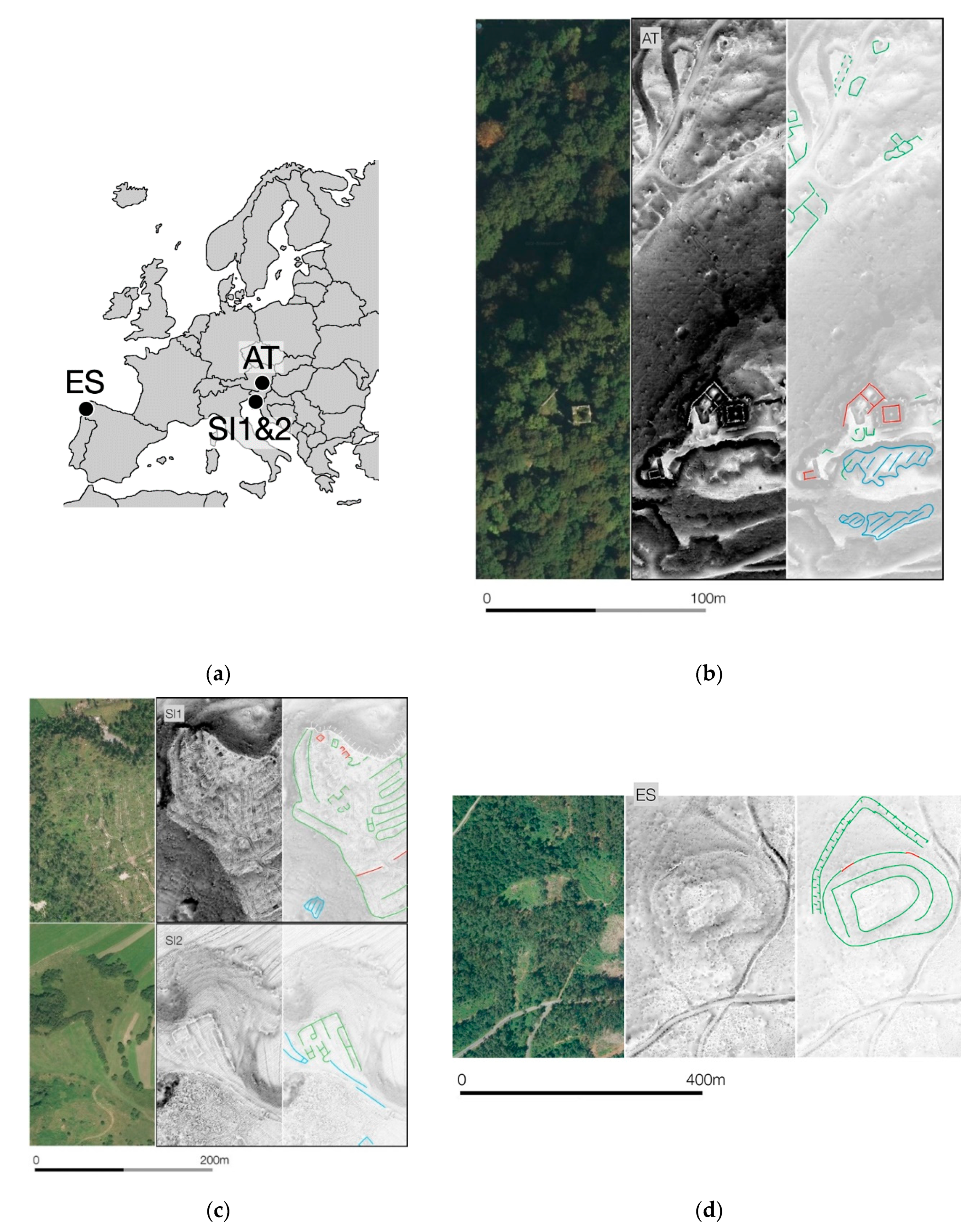
2.1. Data
- Hilltop settlement (archaeology)
- Buildings (modern)
- Vegetation on steep slopes
- Sharp discontinuities.
- features embedded in the ground (slight positive or negative bulge, typically up to 0.5 m rise over 5 to 20 m run; blue in Figure 1),
- features partially embedded in the ground (positive or negative spike, typically more than 0.5 m rise over 5 m run; green in Figure 1),
- standing features (an archaeological term for an off-terrain object characterized by a sharp discontinuity in the ground; red in Figure 1), and
- large standing objects (large building-like structures).
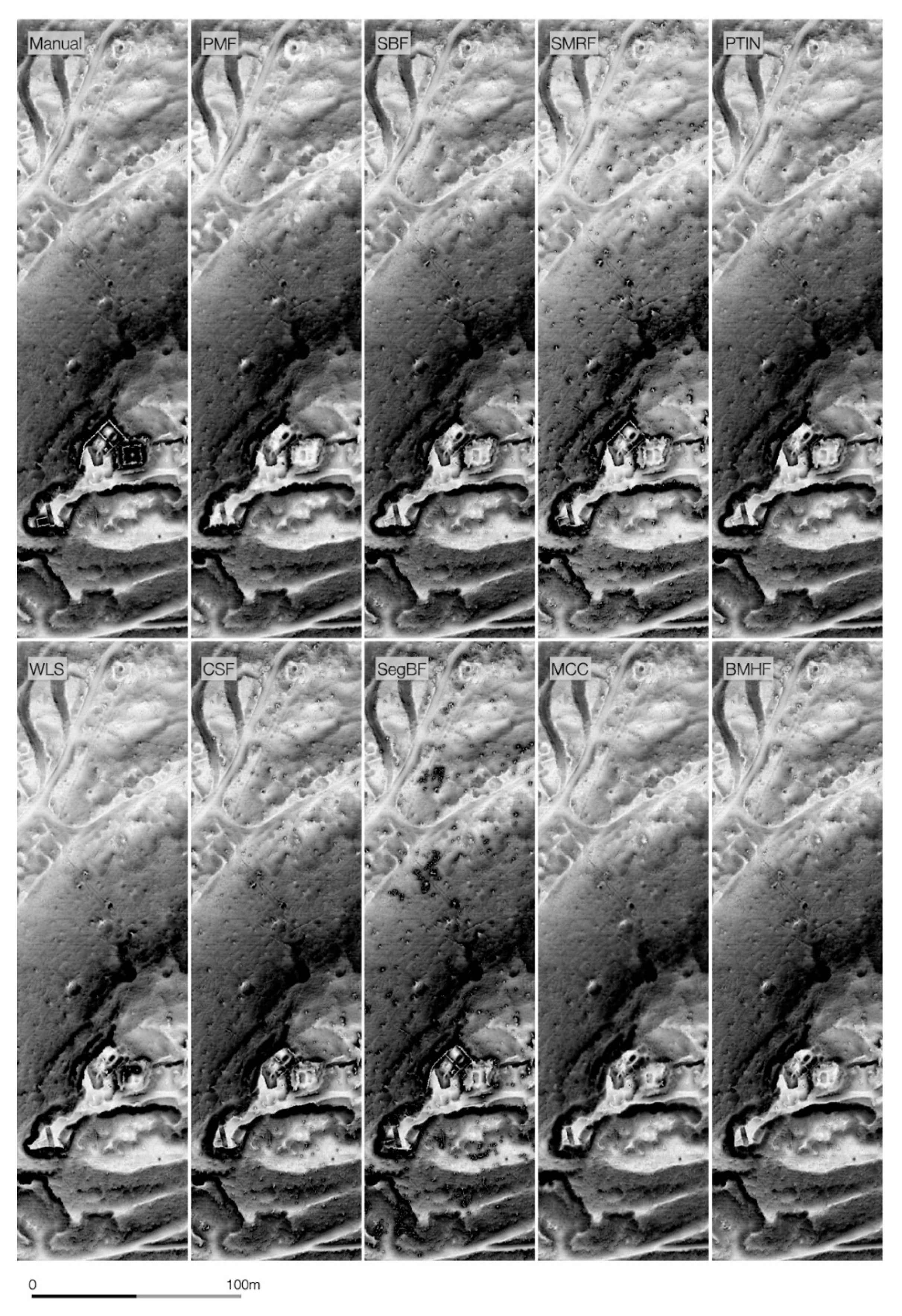
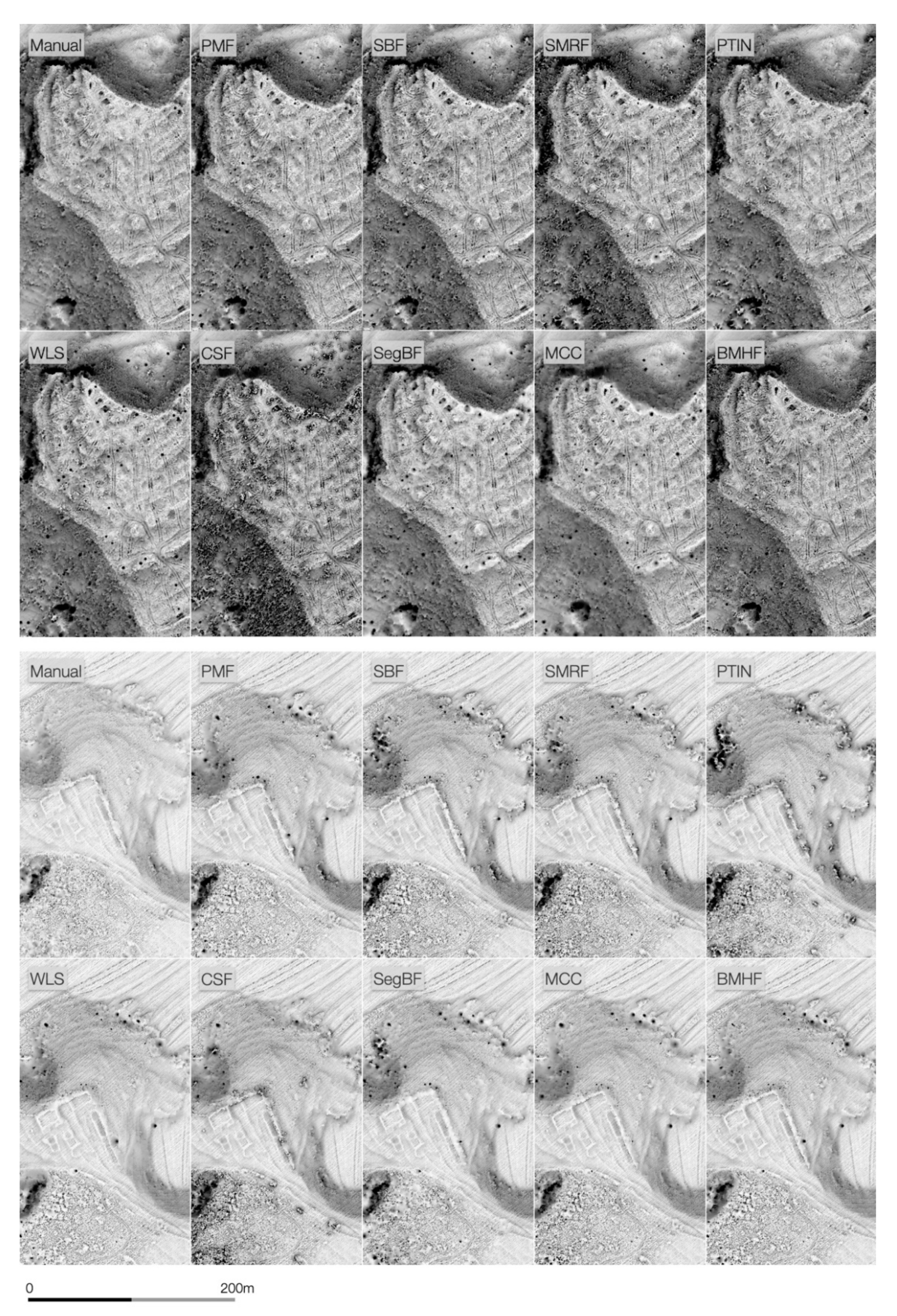
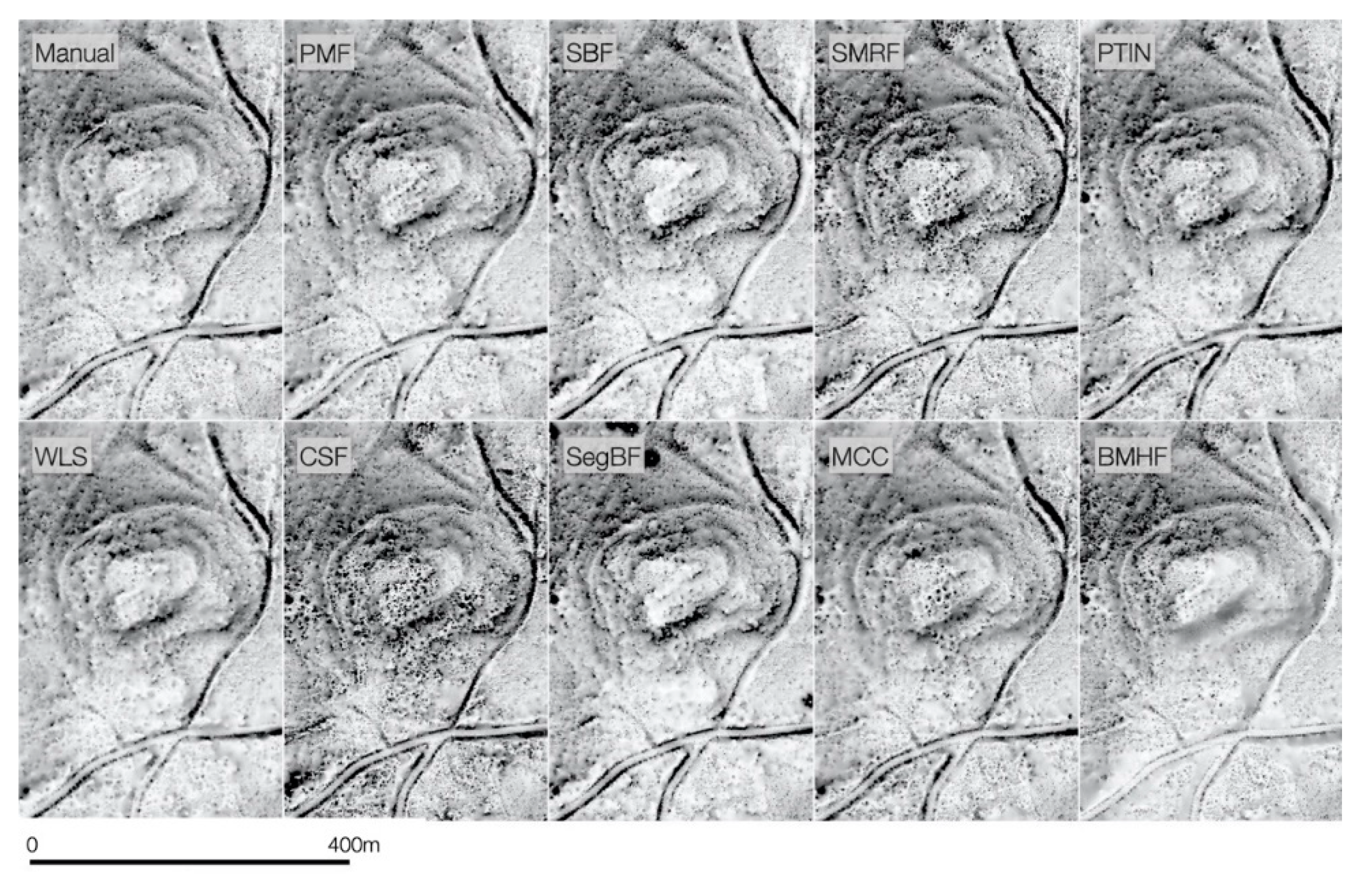
2.2. Evaluated Filters
- morphological filtering (PMF, SBF, SMRF),
- progressive densification (PTIN),
- surface-based filtering (WLS, CSF),
- segmentation-based filtering (SegBF),
- other (MCC), and
- hybrid (BMHF).
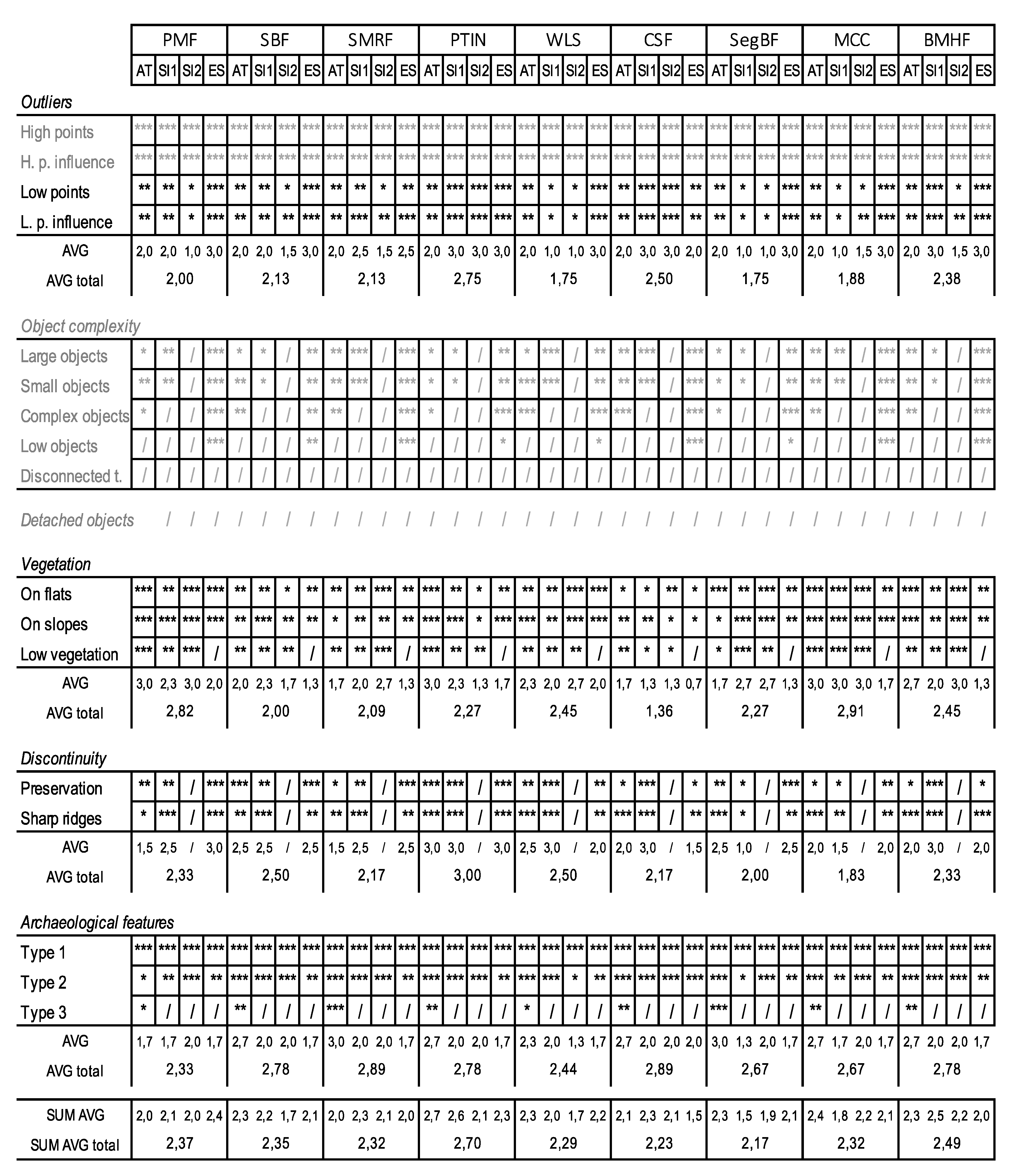
2.3. Method for Quantitative and Qualitative Assessment
- step 1: default value 2.0;
- step 2: value 3.0 leads to a deterioration;
- step 3: value 1.0 leads to an improvement;
- step 4: value 0.5 leads to a deterioration;
- result: value 1.0 is optimal.
- outliers (low or high, occur mainly due to sensor errors);
- object complexity (refers to buildings that are difficult to detect due to their size, low height, or complex shape);
- detached objects (buildings on slopes, bridges, ramps);
- vegetation (problematic categories are vegetation on slopes and low vegetation);
- discontinuity (sharp changes in a slope like cliffs and sharp ridges are treated as buildings).For the purposes of this study, we have added the archaeology-specific category:
- archaeological features (type 1, type 2, and type 3 as defined above in Section 2.1).
- the archaeological features must cover at least 50% of the area, and
- the area represents the most difficult rather than average situation.
3. Results
3.1. Qualitative Assessment
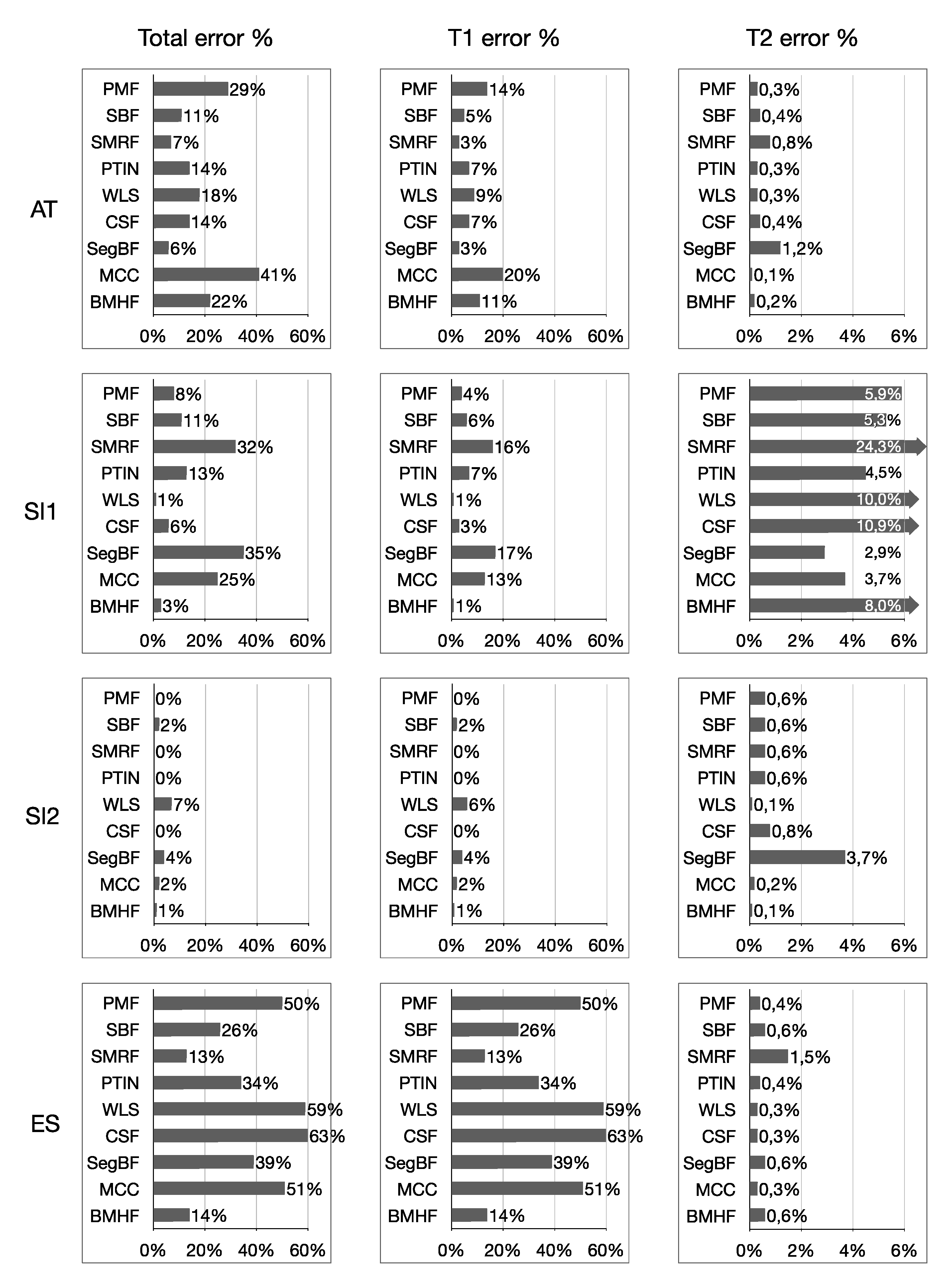
3.2. Quantitative Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Description of and Experience with the Filters Used in the Case Studies
Appendix A.1. Morphological Filtering
Appendix A.1.1. PMF
Appendix A.1.2. SBF
Appendix A.1.3. SMRF
Appendix A.2. Progressive Densification
PTIN
Appendix A.3. Surface-Based Filtering
Appendix A.3.1. WLS
Appendix A.3.2. CSF
Appendix A.4. Segmentation Based Filtering
SegBF
Appendix A.5. Other Filters
Appendix A.5.1. MCC
Appendix A.5.2. BMHF

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tested Settings | Best Settings | |||||||
|---|---|---|---|---|---|---|---|---|
| Setting | Range | Step | AT | SI1 | SI2 | ES | ||
| PMF | ws | 3,12, 3 | 3,18, 3 | 3 | 3,12, 3 | 3,12, 3 | 3,12, 3 | 3,18, 3 |
| th | 0.1, 1.0 | 0.3, 7.0 | 0.5 (0.2 1) | 0.1, 7.0 | 0.3, 1.5 | 0.3, 1.5 | 0.1, 1.0 | |
| SBF | r | 2.0 | 7.5 | 0.5 | 2.0 | 3.0 | 3.0 | 7.5 |
| n | 3 | 3 | 1 | 3 | 3 | 3 | 3 | |
| st | 25 | 60 | 5 | 60 | 45 | 30 | 25 | |
| ht | 0.3 | 1.0 | 0.5 (0.2 1) | 1 | 0.5 | 0.5 | 0.3 | |
| n | on | on | / | on | on | on | on | |
| SMRF | c | 1.0 | 1.0 | / | 1.0 | 1.0 | 1.0 | 1.0 |
| sc | 0.0 | 1.45 | / | 1.45 | 1.3 | 0.0 | 0.9 | |
| st | 0.05 | 0.28 | / | 0.28 | 0.16 | 0.12 | 0.05 | |
| t | 0.35 | 0.45 | / | 0.45 | 0.35 | 0.45 | 0.35 | |
| w | 5 | 20 | / | 5 | 18 | 20 | 17 | |
| PTIN | st | 3 | 10 | / | 5 | 3 | 5 | 10 |
| g | / | / | / | / | / | / | / | |
| off | 0.05 | 0.5 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | |
| s+ | 0.5 | 2.0 | 0.25 | 1.0 | 1.0 | 1.0 | 1.0 | |
| s- | 0.5 | 2.0 | 0.25 | 1.0 | 0.75 | 0.75 | 1.0 | |
| b | / | / | / | no | no | no | no | |
| terrain type | wilderness | city | / | wilderness | nature | wilderness | town | |
| pre-processig | Hyper-fine | fine | / | ultra fine | hyper fine | ultra fine | ultra fine | |
| WLS | c | 0.25 | 3 | 0.5 (0.25) | 0.5 | 1 | 1 | 2 |
| gparam | −3.0 | 0.5 | 0.5 | 0 | 0 | −1.0 | 0 | |
| wparam | 0.5 | 3.0 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | |
| olh | 0 | 2 | 0.5 | No | No | No | No | |
| it | 2 | 20 | 5 | 10 | 10 | 10 | 10 | |
| fs | No | Yes | / | No | No | No | No | |
| CSF | s | hard | med | / | hard | hard | hard | medium |
| r | 0.3 | 1 | 0.5 (0.2 1) | 0.3 | 0.5 | 0.5 | 1 | |
| it | 1000 | 1000 | 250 | 1000 | 1000 | 1000 | 1000 | |
| th | 0.5 | 0.5 | 0.5 (0.2 1) | 0.5 | 0.5 | 0.5 | 0.5 | |
| sp | on | on | / | on | on | on | on | |
| SegBF | r | 1.5 | 4.5 | 0.5 | 4.5 | 1.5 | 1.5 | 3.0 |
| s | 1.0 | 2.0 | 0.5 | 2.0 | 1.0 | 1.0 | 1.5 | |
| h | 0.25 | 0.5 | 0.25 | 0.5 | 0.5 | 0.25 | 0.5 | |
| MCC | λ | 0.5 | 2.5 | 0.25 | 1.0 | 2.0 | 2.0 | 1.75 |
| t | 0.1 | 1.0 | 0.1 | 0.2 | 0.2 | 0.2 | 0.2 | |
| BMHF | ht | 25 | 100 | 25 | 50 | 50 | 50 | 50 |
| st | 5 | 40 | 2.5 | 35 | 35 | 7.5 | 15 | |
| b | 5 | 30 | 5 | 20 | 25 | 10 | 20 | |
| bin | 0.5 | 2.0 | 0.25 | 0.75 | 1.5 | 1.5 | 3 | |
| h | 0.1 | 0.5 | 0.1 | 0.3 | 0.3 | 0.3 | 0.3 | |
References
- Cohen, A.; Klassen, S.; Evans, D. Ethics in Archaeological Lidar. J. Comput. Appl. Archaeol. 2020, 3, 76–91. [Google Scholar] [CrossRef]
- Chase, A.; Chase, D.; Chase, A. Ethics, new colonialism, and lidar data: A decade of lidar in Maya archaeology. J. Comput. Appl. Archaeol. 2020, 3, 51–62. [Google Scholar] [CrossRef]
- Crutchley, S. Light Detection and ranging (lidar) in the Witham Valley, lincolnshire: An assessment of new remote sensing techniques. Archaeol. Prospect. 2006, 13, 251–257. [Google Scholar] [CrossRef]
- Challis, K.; Carey, C.; Kincey, M.; Howard, A.J. Assessing the preservation potential of temperate, lowland alluvial sediments using airborne lidar intensity. J. Archaeol. Sci. 2011, 38, 301–311. [Google Scholar] [CrossRef]
- Inomata, T.; Triadan, D.; López, V.A.V.; Fernandez-Diaz, J.C.; Omori, T.; Bauer, M.B.M.; Hernández, M.G.; Beach, T.; Cagnato, C.; Aoyama, K.; et al. Monumental architecture at Aguada Fénix and the rise of Maya civilization. Nature 2020, 582, 530–533. [Google Scholar] [CrossRef] [PubMed]
- Stanton, T.W.; Ardren, T.; Barth, N.C.; Fernandez-Diaz, J.C.; Rohrer, P.; Meyer, D.; Miller, S.J.; Magnoni, A.; Pérez, M. “Structure” density, area, and volume as complementary tools to understand Maya Settlement: An analysis of lidar data along the great road between Coba and Yaxuna. J. Archaeol. Sci. Rep. 2020, 29, 102178. [Google Scholar] [CrossRef]
- Evans, D. Airborne laser scanning as a method for exploring long-term socio-ecological dynamics in Cambodia. J. Archaeol. Sci. 2016, 74, 164–175. [Google Scholar] [CrossRef] [Green Version]
- Laharnar, B.; Lozić, E.; Štular, B. A structured Iron Age landscape in the hinterland of Knežak, Slovenia. In Rural Settlement: Relating Buildings, Landscape, and People in the European Iron Age; Cowley, D.C., Fernández-Götz, M., Romankiewicz, T., Wendling, H., Eds.; Sidestone Press: Leiden, Holland, 2019; pp. 263–272. [Google Scholar]
- Gheyle, W.; Stichelbaut, B.; Saey, T.; Note, N.; Van den Berghe, H.; Van Eetvelde, V.; Van Meirvenne, M.; Bourgeois, J. Scratching the surface of war. Airborne laser scans of the Great War conflict landscape in Flanders (Belgium). Appl. Geogr. 2018, 90, 55–68. [Google Scholar] [CrossRef]
- Doneus, M.; Kühtreiber, T. Airborne laser scanning and archaeological interpretation–bringing back the people. In Interpreting Archaeological Topography. Airborne Laser Scanning, 3D Data and Ground Observation; Opitz, R.S., Cowley, D.C., Eds.; Oxbow Books: Oxford, UK, 2013; pp. 33–50. [Google Scholar]
- Crutchley, S.; Crow, P. The Light Fantastic: Using Airborne Laser Scanning in Archaeological Survey; English Heritage: Swindon, UK, 2010. [Google Scholar]
- Doneus, M.; Briese, C. Airborne laser scanning in forested areas–potential and limitations of an archaeological prospection technique. In Remote Sensing for Archaeological Heritage Management, Proceedings of the 11th EAC Heritage Management Symposium, Reykjavik, Iceland, 25–27 March 2010; Cowley, D., Ed.; Archaeolingua: Budapest, Hungary, 2011; pp. 53–76. [Google Scholar]
- Opitz, R.S. An overview of airborne and terrestrial laser scanning in archaeology. In Airborne Laser Scanning, 3D Data and Ground Observation; Opitz, R.S., Cowley, D.C., Eds.; Oxbow Books: Oxford, UK, 2013; pp. 13–31. [Google Scholar]
- Fernandez-Diaz, J.; Carter, W.; Shrestha, R.; Glennie, C. Now you see it... now you don’t: Under- standing airborne mapping LiDAR collection and data product generation for archaeological research in Mesoamerica. Remote Sens. 2014, 6, 9951–10001. [Google Scholar] [CrossRef] [Green Version]
- Štular, B.; Lozić, E. Primernost podatkov projekta Lasersko skeniranje Slovenije za arheološko interpretacijo: Metoda in študijski primer (The Suitability of Laser Scanning of Slovenia Data for Archaeological Interpretation: Method and a Case Study). In Digitalni Podatki; Ciglič, R., Geršič, M., Perko, D., Zorn, M., Eds.; Geografski inštitut Antona Melika ZRC SAZU: Ljubljana, Slovenia, 2016; pp. 157–166. [Google Scholar]
- Doneus, M.; Mandlburger, G.; Doneus, N. Archaeological ground point filtering of airborne laser scan derived point-clouds in a difficult mediterranean environment. J. Comput. Appl. Archaeol. 2020, 3, 92–108. [Google Scholar] [CrossRef] [Green Version]
- Johnson, K.M.; Ouimet, W.B. An observational and theoretical framework for interpreting the landscape palimpsest through airborne LiDAR. Appl. Geogr. 2018, 91, 32–44. [Google Scholar] [CrossRef]
- Rutkiewicz, P.; Malik, I.; Wistuba, M.; Osika, A. High concentration of charcoal hearth remains as legacy of historical ferrous metallurgy in southern Poland. Quat. Int. 2019, 512, 133–143. [Google Scholar] [CrossRef]
- Pingel, T.J.; Clarke, K.; Ford, A. Bonemapping: A LiDAR processing and visualization technique in support of archaeology under the canopy. Cartogr. Geogr. Inf. Sci. 2015, 41 (Suppl. S1), 18–26. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Lieskovský, T.; Chalachanová, J.F. The assessment of the chosen LiDAR data sources in Slovakia for the archaeological spatial analysis. In Advances and Trends in Geodesy, Cartography and Geoinformatics II; Molčíková, S., Hurčiková, V., Blišťan, P., Eds.; CRC Press: Boca Raton, FL, USA, 2020; pp. 190–195. [Google Scholar]
- Podobnikar, T.; Vrečko, A. Digital elevation model from the best results of different filtering of a LiDAR point cloud. Trans. GIS 2012, 16, 603–617. [Google Scholar] [CrossRef]
- Julge, K.; Ellmann, A.; Gruno, A. Performance analysis of freeware filtering algorithms for determining ground surface from airborne laser scanning data. J. Appl. Remote Sens. 2014, 8. [Google Scholar] [CrossRef]
- Montealegre, A.L.; Lamelas, M.T.; de la Riva, J. A Comparison of Open-Source LiDAR Filtering Algorithms in a Mediterranean Forest Environment. J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4072–4085. [Google Scholar] [CrossRef] [Green Version]
- Andrade, M.S.; Gorgens, E.B.; Reis, C.R.; Cantinho, R.Z.; Assis, M.; Sato, L.; Ometto, J.P.H.B. Airborne laser scanning for terrain modeling in the Amazon forest. Acta Amaz. 2018, 48, 271–279. [Google Scholar] [CrossRef]
- Suleymanoglu, B.; Soycan, M. Comparison of filtering algorithms used for DTM production from airborne lidar data: A case study in Bergama, Turkey. Geod. Vestn. 2019, 63, 395–414. [Google Scholar] [CrossRef]
- Cosenza, D.N.; Pereira, L.G.; Guerra-Hernández, J.; Pascual, A.; Soares, P.; Tomé, M. Impact of calibrating filtering algorithms on the quality of LiDAR-derived DTM and on forest attribute estimation through area-based approach. Remote Sens. 2020, 12, 918. [Google Scholar] [CrossRef] [Green Version]
- Die Steiermark ist komplett... (ALS-Daten). Available online: https://web.archive.org/web/20200908101053/https://www.landesentwicklung.steiermark.at/cms/beitrag/11905526/142970647/ (accessed on 8 September 2020).
- Čekada, M.T.; Bric, V. Končan je projekt laserskega skeniranja Slovenije. Geod. Vestn. 2015, 59, 586–592. [Google Scholar]
- PNOA LiDAR. Available online: https://web.archive.org//web/20200910132414/https://pnoa.ign.es/el-proyecto-pnoa-lidar (accessed on 8 September 2020).
- Gutjahr, C.; Karl, S.; Obersteiner, G.P. Hengist Best-of. Führer zu archäologischen Fundstellen und Baudenkmalen in der Region Hengist; Hengist-Magazin Sonderband 1/2018; Kulturpark Hengist: Wildon, Austria, 2018. [Google Scholar]
- Fuchs, G. Die höhensiedlungen der steiermark im kontext der regionalen siedlungsstrukturen. In Wirtschaft, Macht und Strategie. Höhensiedlungen und ihre Funktionen in der Ur-und Frühgeschichte; Krenn-Leeb, A., Ed.; Verlag Osterreichische Gesellschaft fur Ur- und Fruhgeschichte: Wien, Austria, 2006; pp. 173–187. [Google Scholar]
- Stepišnik, U. Dinarski kras: Plitvi kras Zgornje Pivke; Univerza v Ljubljani: Ljubljana, Slovenia, 2017. [Google Scholar]
- Laharnar, B.; Lozić, E.; Miškec, A. Gradišče above Knežak. In Minor Roman Settlements in Slovenia; Horvat, J., Lazar, I., Gaspari, A., Eds.; ZRC Publishing: Ljubljana, Slovenia, 2020; pp. 123–140. [Google Scholar] [CrossRef]
- Arias, J.G. Mapa Geologico de España. E.1:50.000-Hoja 120–Padrón; Instituto Geológico y Minero de España: Madrid, Spain, 1981. [Google Scholar]
- Costa-García, J.M.; Fonte, J.; Gago, M. The reassessment of the Roman military presence in Galicia and Northern Portugal through digital tools: Archaeological diversity and historical problems. Mediterr. Archaeol. Archaeom. 2019, 19, 17–49. [Google Scholar] [CrossRef]
- BCAL Lidar Tools. Available online: https://web.archive.org/web/20200908101726/https://www.boisestate.edu/bcal/tools-resources/bcal-lidar-tools/ (accessed on 8 September 2020).
- Whitebox Geospatial Analysis Tools. Available online: https://web.archive.org/web/20200908101926/https://jblindsay.github.io/ghrg/Whitebox/ (accessed on 8 September 2020).
- Zhang, K.; Cui, Z. Airborne LiDAR Data Processing and Analysis Tools—ALDPAT 1.0 Software Manual; International Hurricane Research Centre, Department of Environmental Studies, Florida International University: Miami, FL, USA, 2007. [Google Scholar]
- Lasground. Available online: https://web.archive.org/web/20200908102857/https://rapidlasso.com/lastools/lasground/ (accessed on 8 September 2020).
- Mongus, D.; Lukač, N.; Žalik, B. Ground and building extraction from LiDAR data based on differential morphological profiles and locally fitted surfaces. ISPRS J. Photogramm. Remote Sens. 2014, 93, 145–156. [Google Scholar] [CrossRef]
- gLIDAR. Available online: https://web.archive.org/web/20200908103254/https://gemma.feri.um.si/gLiDAR/ (accessed on 8 September 2020).
- Bartels, M.; Wei, H. Threshold-free object and ground point separation in LIDAR data. Pattern Recognit. Lett. 2010, 31, 1089–1099. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C.; Fera, M.; Janner, M. Archaeological prospection of forested areas using full-waveform airborne laser scanning. J. Archaeol. Sci. 2008, 35, 882–893. [Google Scholar] [CrossRef]
- Briese, C. Extraction of digital terrain models. In Airborne and Terrestrial Laser Scanning; Vosselman, G., Maas, H.-G., Eds.; Whittles Publishing: Dunbeath, UK, 2010; pp. 135–167. [Google Scholar]
- Pfeifer, N.; Mandlburger, G. LiDAR data filtering and digital terrain model generation. In Topographic Laser Ranging and Scanning: Principles and Processing; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 349–378. [Google Scholar]
- Buján, S.; Cordero, M.; Miranda, D. Hybrid overlap filter for LiDAR point clouds using free software. Remote Sens. 2020, 12, 1051. [Google Scholar] [CrossRef] [Green Version]
- Vosselman, G. Slope based filtering of laser altimetry data. Int. Arch. Photogramm. Remote Sens. 2000, 33, 935–942. [Google Scholar]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Gao, B.; Devereux, B. State-of-the-art: DTM generation using airborne LIDAR data. Sensors 2017, 17, 150. [Google Scholar] [CrossRef] [Green Version]
- Ackermann, F. Airborne laser scanning—Present status and future expectations. ISPRS J. Photogramm. Remote Sens. 1999, 54, 64–67. [Google Scholar] [CrossRef]
- Axelsson, P. Processing of laser scanner data—Algorithms and applications. ISPRS J. Photogramm. Remote Sens. 1999, 54, 138–147. [Google Scholar] [CrossRef]
- Pingel, T.J.; Clarke, K.C.; McBride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, S.-C.; Whitman, D.; Shyu, M.-L.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef] [Green Version]
- Axelsson, P. DEM generation from laser scanner data using adaptive tin models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 110–117. [Google Scholar]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- McGaughey, R.J. FUSION/LDV: Software for LIDAR Data Analysis and Visualization, v. 3.60; United States Department of Agriculture: Seattle, WA, USA, 2016. [Google Scholar]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering Method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar]
- Lindsay, J.B.; Francioni, A.; Cockburn, J.M.H. LiDAR DEM smoothing and the preservation of drainage features. Remote Sens. 2019, 11, 1926. [Google Scholar] [CrossRef] [Green Version]
- Evans, J.S.; Hudak, A.T. A multiscale curvature algorithm for classifying discrete return lidar in forested environments. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1029–1038. [Google Scholar] [CrossRef]






| AT | SI1 | SI2 | ES | |
|---|---|---|---|---|
| Pnt/m2 | 18.79 | 12.28 | 12.43 | 1.83 |
| File format | XYZ | LAS/LAZ | LAS/LAZ | LAZ |
| ISPR classes | / | 0–7 | 0–7 | 0–7, 10, 12 |
| Year of acquisition | 2009 | 2014 | 2014 | 2015 |
| Filter | Acronym | Software | Software Type |
|---|---|---|---|
| progressive morphological f. | PMF | lidR 2.2.4 | free |
| slope-based f. | SBF | Whitebox tools | free |
| simple morphological f. | SMRF | PDAL 2.1.x | free |
| progressive triangulated irregular network | PTIN | lasground_new | commercial |
| weighted linear least-squares interpolation | WLS | Fusion 3.80 | free |
| cloth simulation f. | CSF | CloudCompare 2.10.2 | free |
| segmentation based f. | SegBF | Whitebox tools | free |
| multiscale curvature classification | MCC | MCC-LIDAR 2.2 | free |
| Blue Marble Geographic’s hybrid f. | BMHF | Global Mapper 21.x | commercial |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Štular, B.; Lozić, E. Comparison of Filters for Archaeology-Specific Ground Extraction from Airborne LiDAR Point Clouds. Remote Sens. 2020, 12, 3025. https://doi.org/10.3390/rs12183025
Štular B, Lozić E. Comparison of Filters for Archaeology-Specific Ground Extraction from Airborne LiDAR Point Clouds. Remote Sensing. 2020; 12(18):3025. https://doi.org/10.3390/rs12183025
Chicago/Turabian StyleŠtular, Benjamin, and Edisa Lozić. 2020. "Comparison of Filters for Archaeology-Specific Ground Extraction from Airborne LiDAR Point Clouds" Remote Sensing 12, no. 18: 3025. https://doi.org/10.3390/rs12183025
APA StyleŠtular, B., & Lozić, E. (2020). Comparison of Filters for Archaeology-Specific Ground Extraction from Airborne LiDAR Point Clouds. Remote Sensing, 12(18), 3025. https://doi.org/10.3390/rs12183025