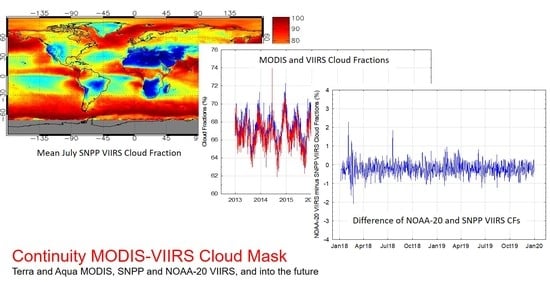
The Continuity MODIS-VIIRS Cloud Mask


Abstract
:
1. Introduction
2. Materials and Methods
2.1. 6/2.1 µm Ocean Day Threshold Test
2.2. Turbid Water Test
2.3. Test for Snow Cover over Vegetated Regions
2.4. New Test Thresholds in the MVCM
2.5. Daytime Land 1.38 µm Cirrus Test
2.6. Daytime Water 0.86, 1.6/2.1, and 1.38 µm Thresholds
3. Results
3.1. An Example Aqua MODIS Scene
3.2. Comparisons to CALIOP Lidar
3.3. Comparisons of the MVCM between Aqua MODIS, SNPP VIIRS, and NOAA-20 VIIRS
3.4. Cirrus Detection Comparison between MODIS and VIIRS 1.38 µm Channels
3.5. Cloud Detection in the Arctic
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ackerman, S.; Platnick, S.; Bhartia, P.; Duncan, B.; L’Ecuyer, T.; Heidinger, A.; Skofronick-Jackson, G.; Loeb, N.; Schmidt, T.; Smith, W. Satellites see the world’s atmosphere. Meteor. Monogr. 2018. [Google Scholar] [CrossRef]
- Lehnert, L.; Thies, B.; Bendix, J. A new high spatial low stratus/fog retrieval for the Atacama Desert. Remote Sens. Environ. 2020, 236, 111445–111455. [Google Scholar]
- Brun, F.; Dumont, M.; Wagnon, P.; Berthier, E.; Azum, M.; Shea, J.; Sirguey, P.; Rabatel, A.; Ramanathan, A. Seasonal changes in surface albedo of Himalayan glaciers from MODIS data and links with the annual mass balance. Cryosphere 2015, 9, 341–355. [Google Scholar] [CrossRef] [Green Version]
- Uddstrom, M.; Gray, W.; Murphy, R.; Oien, N.; Murray, T. A Bayesian cloud mask for sea surface temperature retrieval. J. Atmos. Ocean Tech. 1999, 16, 117–133. [Google Scholar] [CrossRef]
- Liu, R.; Liu, Y. Generation of new cloud masks from MODIS land surface reflectance products. Remote Sens. Environ. 2013, 133, 21–37. [Google Scholar]
- Minnis, P.; Young, D.; Spangenberg, D.; Heck, P.; Doelling, D.; Trepte, Q.; Chen, Y. Cloud mask for CERES from VIRS on the TRMM satellite. In Proceedings of the ALPS 99 Symposium, Meribel, France, 18–22 January 1999; WK-P-06. pp. 1–4. [Google Scholar]
- Frey, R.; Ackerman, S.; Soden, B. Climate parameters from satellite spectral measurements. Part I: Collocated AVHRR and HIRS/2 observations of spectral greenhouse parameter. J. Clim. 1996, 9, 327–344. [Google Scholar] [CrossRef] [Green Version]
- Rossow, W.; Walker, A.; Garder, L. Comparison of ISCCP and other cloud amounts. J. Clim. 1993, 6, 2394–2418. [Google Scholar] [CrossRef] [Green Version]
- Heidinger, A.; Evan, A.; Foster, M.; Walther, A. A naïve Bayesian cloud-detection scheme derived from CALIPSO and applied within PATMOS-x. J. Clim. Appl. Meteorol. 2012, 51, 1129–1144. [Google Scholar] [CrossRef]
- Heidinger, A. Algorithm Theoretical Basis Document: ABI Cloud Mask. NOAA NESDIS Center for Satellite Applications and Research. Ver. 3.0. 2012. Available online: www.goes-r.gov (accessed on 19 August 2020).
- Heidinger, A.; Botambekov, D.; Walther, A. A Naïve Bayesian Cloud Mask Delivered to NOAA Enterprise. Ver. 1.2. 2016. Available online: https://www.star.nesdis.noaa.gov/goesr/documents/ATBDs/Enterprise/ATBD_Enterprise_Cloud_Mask_v1.2_Oct2016.pdf (accessed on 24 August 2020).
- Ackerman, S.; Strabala, K.; Menzel, W.P.; Frey, R.; Moeller, C.; Gumley, L. Discriminating clear sky from clouds with MODIS. J. Geophys. Res. 1998, 103, 32141–32157. [Google Scholar] [CrossRef]
- Ackerman, S.; Frey, R.; Strabala, K.; Liu, K.; Gumley, L.; Baum, B.; Menzel, W.P. Discriminating Clear-Sky from Clouds with MODIS Algorithm Theoretical Basis Document (MOD35). Ver. 6.1. October 2010. Available online: https://atmosphere-imager.gsfc.nasa.gov/sites/default/files/ModAtmo/MOD35_ATBD_Collection6_0.pdf (accessed on 19 August 2020).
- Barnes, W.; Pagano, T.; Salomonson, V. Pre-launch characteristics of the Moderate Resolution Imaging Spectroradiometer (MODIS) on EOS AM1. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1088–1100. [Google Scholar]
- Oudrari, H.; McIntire, J.; Xiong, X.; Butler, J.; Lee, S.; Lei, N.; Schwarting, T.; Sun, J. Prelaunch radiometric characterization and calibration of the S-NPP VIIRS sensor. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2195–2210. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Continuity of NASA Earth Observations from Space: A Value Framework; The National Academies Press: Washington, DC, USA, 2015. [Google Scholar] [CrossRef]
- Liu, Y.; Key, J.; Frey, R.; Ackerman, S.; Menzel, W.P. Nighttime polar cloud detection with MODIS. Remote Sens. Environ. 2004, 92, 181–194. [Google Scholar] [CrossRef]
- Gladkova, I.; Grossberg, M.; Borev, G.; Shahriar, F. A multiband statistical restoration of the aqua MODIS 1.6 micron band. In Proceedings of the SPIE, Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XVII, Orlando, FL, USA, 20 May 2011; Volume 8048. [Google Scholar]
- Chen, S.; Zhang, T. An improved cloud masking algorithm for MODIS ocean colour data processing. Remote Sens. Lett. 2015, 6, 218–227. [Google Scholar] [CrossRef]
- Klein, A.; Hall, D.; Riggs, G. Improving snow cover mapping in forests through the use of a canopy reflectance model. Hydrol. Process. 1998, 12, 1723–1744. [Google Scholar]
- Winker, D.; Vaughan, M.; Hunt, B. The CALIPSO mission and initial results from CALIOP. In Proceedings of the SPIE 6409, Lidar Remote Sensing for Environmental Monitoring VII, Goa, India, 13–17 November 2006. [Google Scholar] [CrossRef]
- Winker, D.; Vaughan, M.; Omar, A.; Hu, Y.; Powell, K.; Liu, Z.; Hunt, W.; Young, S. Overview of the CALIPSO mission and CALIOP data processing algorithms. J. Atmos. Oceanic Technol. 2009, 26, 2310–2323. [Google Scholar] [CrossRef]
- Atmosphere SIPS. Available online: https://earthdata.nasa.gov/eosdis/sips/atmosphere-sips (accessed on 9 June 2020).
- Holz, R.; Ackerman, A.; Nagle, F.; Frey, R.; Dutcher, S.; Kuehn, R.; Vaughan, M.; Baum, B. Global moderate resolution imaging spectroradiometer (MODIS) cloud detection and height evaluation using CALIOP. J. Geophys. Res. 2008, 113. [Google Scholar] [CrossRef] [Green Version]
- Meyer, K.; Platnick, S.; Holz, R.; Dutcher, S.; Quinn, G.; Nagle, F. Derivation of shortwave radiometric adjustments for SNPP and NOAA-20 VIIRS for the NASA MODIS-VIIRS continuity cloud products. Remote Sens. 2020, in press. [Google Scholar]
- Xie, L.; Zhao, F.; Chen, L.; Zhang, R.; Mao, K.; Kylling, A.; Ma, Y. Performance comparison of the MODIS and the VIIRS 1.38 µm cirrus cloud channels using libRadtran and CALIOP data. Remote Sens. Environ. 2018, 206, 363–374. [Google Scholar] [CrossRef]
- Wolfe, R.; Lin, G.; Nishihama, M.; Tewari, K.; Tilton, J.; Isaacman, A. Suomi NPP VIIRS prelaunch and on-orbit geometric calibration and characterization. J. Geophys. Res. 2013, 118, 11508–11521. [Google Scholar] [CrossRef] [Green Version]
- Wyser, K.; Jones, C.; Du, P.; Girard, E.; Willén, U.; Cassano, J.; Christensen, J.H.; Curry, J.A.; Dethloff, K.; Haugen, J.-E.; et al. An evaluation of Arctic cloud and radiation processes during the SHEBA year: Simulation results from eight Arctic regional climate models. Clim. Dyn. 2008, 30, 203–223. [Google Scholar]
- Vavrus, S.; Holland, M.; Bailey, D. Changes in Arctic clouds during intervals of rapid sea ice loss. Clim. Dyn. 2011, 36, 1475–1489. [Google Scholar]
- Kay, J.; L’Ecuyer, T. Observational constraints on Arctic Ocean clouds and radiative fluxes during the early 21st century. J. Geophys. Res. 2013, 118, 7219–7236. [Google Scholar]
- Stephens, G.L.; Vane, D.G.; Boain, R.J.; Mace, G.G.; Sassen, K.; Wang, Z.; Illingworth, A.J.; O’connor, E.J.; Rossow, W.B.; Durden, S.L.; et al. The CLOUDSAT mission and the A-train: A New Dimension of Space-Based Observations of Clouds and Precipitation. Bull. Amer. Meteor. Soc. 2002, 83, 1771–1790. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://ladsweb.modaps.eosdis.nasa.gov/missions-and-measurements/viirs/SNPP_CloudOpticalPropertyContinuityProduct_UserGuide_v1.pdf (accessed on 28 September 2020).
- Meyer, K.; Earth Sciences Division, NASA Goddard Space Flight Center, Greenbelt, MD, USA. Personal communication, 2020.
- Derber, J.; Parrish, D.; Lord, S. The new global operational analysis system at the national meteorological center. Weather Forecast. 1991, 6, 538–547. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spectral Bands Used in the MODIS-VIIRS Cloud Mask (MVCM) | |||
|---|---|---|---|
| MODIS Wavelengths (µm) | MODIS Band | VIIRS Band | Primary Use |
| 0.412 | 8 | M1 | daytime desert cloud detection |
| 0.443 | 9 | M2 | sun glint clear sky detection |
| 0.555 | 4 | M4 | snow/ice detection |
| 0.645 | 1 | M5 | land surface cloud detection |
| 0.859 | 2 | M7 | water surface cloud detection |
| 1.24 | 5 | M8 | turbid water clear sky detection |
| 1.375 | 26 | M9 | transmissive cirrus cloud detection |
| 1.64 | 6 | M10 | snow/ice detection, water surface cloud detection |
| 2.13 | 7 | M11 | snow/ice detection, water surface cloud detection |
| 3.75 | 20 | M12 | land and water surface cloud detection (VIIRS) |
| 3.96 | 21 | not used | land and water surface cloud detection (MODIS) |
| 8.55 | 29 | M14 | water surface ice cloud detection |
| 11.03 | 31 | M15 | night land and water surface cloud detection |
| 12.02 | 32 | M16 | transmissive cirrus cloud detection |
| MODIS Spectral Cloud and Clear Sky Tests Not Found in the MVCM | ||
|---|---|---|
| Wavelengths (µm) | MODIS Band | Use in MxD35 |
| 0.905 | 17 | Clear sky detection in sun glint conditions (0.905/0.936 µm) |
| 0.936 | 18 | Clear sky detection in sun glint conditions (0.905/0.936 µm) |
| 6.7 | 27 | Global high cloud BT threshold test; clear sky detection in polar night conditions (6.7–11 µm BTD) |
| 7.3 | 28 | Nighttime middle cloud detection over land, polar night cloud detection, polar night clear sky detection (7.3–11 µm BTD); nighttime ocean low cloud detection (8.6–7.3 µm BTD) |
| 13.3 | 33 | Clear sky detection in polar night conditions (13.3–11 µm BTD) |
| 13.9 | 35 | Mid-latitude (60S–60N) high cloud BT threshold test |
| MYD35 and MVCM vs. CALIOP Cloud Detection | ||||||||
|---|---|---|---|---|---|---|---|---|
| Scene Type | JJA 2018 Hit Rates (%) | DJF 2017–2018 Hit Rates (%) | ||||||
| M35 | MVCMAqua MODIS | MVCMSNPP VIIRS | MVCM NOAA-20 VIIRS | M35 | MVCMAqua MODIS | MVCMSNPP VIIRS | MVCM NOAA-20 VIIRS (JF) | |
| Global | 88.2 | 87.5 | 86.8 | 86.8 | 88.1 | 86.6 | 86.3 | 86.5 |
| 60S–60N | 90.7 | 90.5 | 90.1 | 90.3 | 90.1 | 89.7 | 89.6 | 89.5 |
| Global Day | 91.1 | 90.5 | 89.3 | 89.2 | 90.6 | 89.9 | 89.4 | 89.0 |
| Global Night | 85.6 | 84.7 | 84.5 | 84.6 | 85.9 | 83.7 | 83.6 | 84.3 |
| 60S–60N Day | 91.0 | 90.6 | 90.2 | 90.3 | 90.8 | 90.2 | 90.3 | 90.0 |
| 60S–60N Night | 90.3 | 90.5 | 90.0 | 90.3 | 89.4 | 89.2 | 88.9 | 88.9 |
| 60S–60N Water Day | 91.4 | 90.6 | 90.4 | 90.6 | 92.3 | 91.0 | 91.5 | 91.3 |
| 60S–60N Water Night | 90.1 | 90.1 | 89.6 | 89.7 | 90.7 | 90.6 | 90.3 | 89.5 |
| 60S–60N Land Day | 90.1 | 90.4 | 89.7 | 89.4 | 86.6 | 87.8 | 86.8 | 86.3 |
| 60S–60N Land Night | 90.9 | 91.7 | 90.8 | 91.9 | 86.0 | 85.3 | 85.6 | 87.6 |
| 60S–60N Desert Day | 91.0 | 91.3 | 90.4 | 91.0 | 85.7 | 86.7 | 85.5 | 84.5 |
| 60S–60N Desert Nt | 90.6 | 91.0 | 90.4 | 91.9 | 83.5 | 84.1 | 85.0 | 86.3 |
| Polar Day | 91.2 | 90.3 | 87.3 | 86.8 | 90.2 | 89.4 | 87.4 | 86.3 |
| Polar Night | 76.9 | 73.5 | 73.9 | 73.7 | 79.7 | 74.2 | 74.6 | 76.5 |
| Algorithm Comparison | Mean Diff. (%) | Std. Dev. (%) | Time Period |
|---|---|---|---|
| MODIS—SNPP VIIRS 60S–60N Day | 0.68 | 0.55 | 2013–2019 |
| MODIS—SNPP VIIRS 60S–60N Night | 0.94 | 0.64 | 2013–2019 |
| N20 VIIRS—SNPP VIIRS 60S–60N Day | −0.20 | 0.50 | 2018–2019 |
| N20 VIIRS—SNPP VIIRS 60S–60N Night | 0.44 | 0.82 | 2018–2019 |
| MODIS—SNPP VIIRS 0–60N Ocean Day | 0.66 | 1.28 | 2013–2019 |
| MODIS—SNPP VIIRS 0–60N Ocean Night | 1.28 | 0.78 | 2013–2019 |
| MODIS—SNPP VIIRS 0–60S Ocean Day | 1.47 | 1.17 | 2013–2019 |
| MODIS—SNPP VIIRS 0–60S Ocean Night | 1.27 | 0.57 | 2013–2019 |
| MODIS—SNPP VIIRS 0–60N Land Day | −0.56 | 1.06 | 2013–2019 |
| MODIS—SNPP VIIRS 0–60N Land Night | −0.44 | 1.85 | 2013–2019 |
| MODIS—SNPP VIIRS 0–60S Land Day | −0.27 | 1.78 | 2013–2019 |
| MODIS—SNPP VIIRS 0–60S Land Night | 1.03 | 2.15 | 2013–2019 |
| N20 VIIRS—SNPP VIIRS 0–60N Ocean Day | −0.32 | 0.85 | 2018–2019 |
| N20 VIIRS—SNPP VIIRS 0–60N Ocean Night | 0.27 | 1.04 | 2018–2019 |
| N20 VIIRS—SNPP VIIRS 0–60S Ocean Day | −0.24 | 0.92 | 2018–2019 |
| N20 VIIRS—SNPP VIIRS 0–60S Ocean Night | 0.22 | 0.72 | 2018–2019 |
| N20 VIIRS—SNPP VIIRS 0–60N Land Day | 0.04 | 0.81 | 2018–2019 |
| N20 VIIRS—SNPP VIIRS 0–60N Land Night | 1.00 | 1.80 | 2018–2019 |
| N20 VIIRS—SNPP VIIRS 0–60S Land Day | −0.19 | 1.58 | 2018–2019 |
| N20 VIIRS—SNPP VIIRS 0–60S Land Night | 0.80 | 1.85 | 2018–2019 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frey, R.A.; Ackerman, S.A.; Holz, R.E.; Dutcher, S.; Griffith, Z. The Continuity MODIS-VIIRS Cloud Mask. Remote Sens. 2020, 12, 3334. https://doi.org/10.3390/rs12203334
Frey RA, Ackerman SA, Holz RE, Dutcher S, Griffith Z. The Continuity MODIS-VIIRS Cloud Mask. Remote Sensing. 2020; 12(20):3334. https://doi.org/10.3390/rs12203334
Chicago/Turabian StyleFrey, Richard A., Steven A. Ackerman, Robert E. Holz, Steven Dutcher, and Zach Griffith. 2020. "The Continuity MODIS-VIIRS Cloud Mask" Remote Sensing 12, no. 20: 3334. https://doi.org/10.3390/rs12203334
APA StyleFrey, R. A., Ackerman, S. A., Holz, R. E., Dutcher, S., & Griffith, Z. (2020). The Continuity MODIS-VIIRS Cloud Mask. Remote Sensing, 12(20), 3334. https://doi.org/10.3390/rs12203334