Bidirectional Segmented Detection of Land Use Change Based on Object-Level Multivariate Time Series

 ,
, 

Abstract
:
1. Introduction
2. Study Area and Data
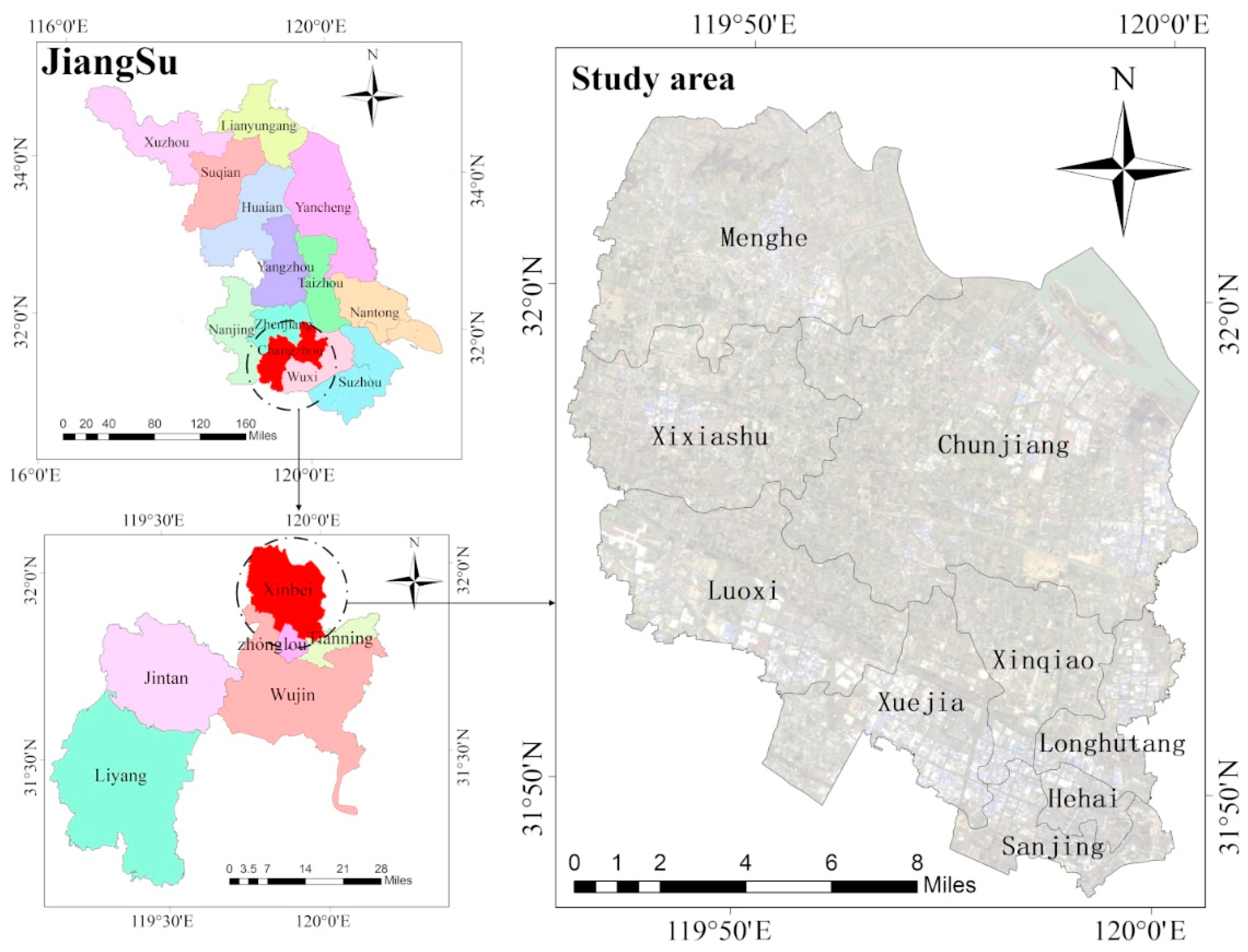
2.1. Study Area
2.2. Data
3. Methodology
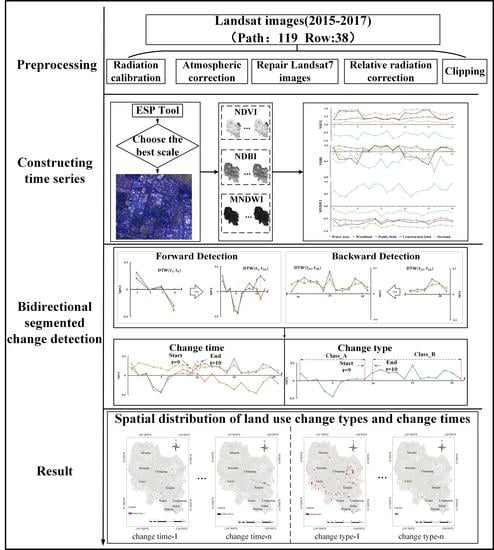
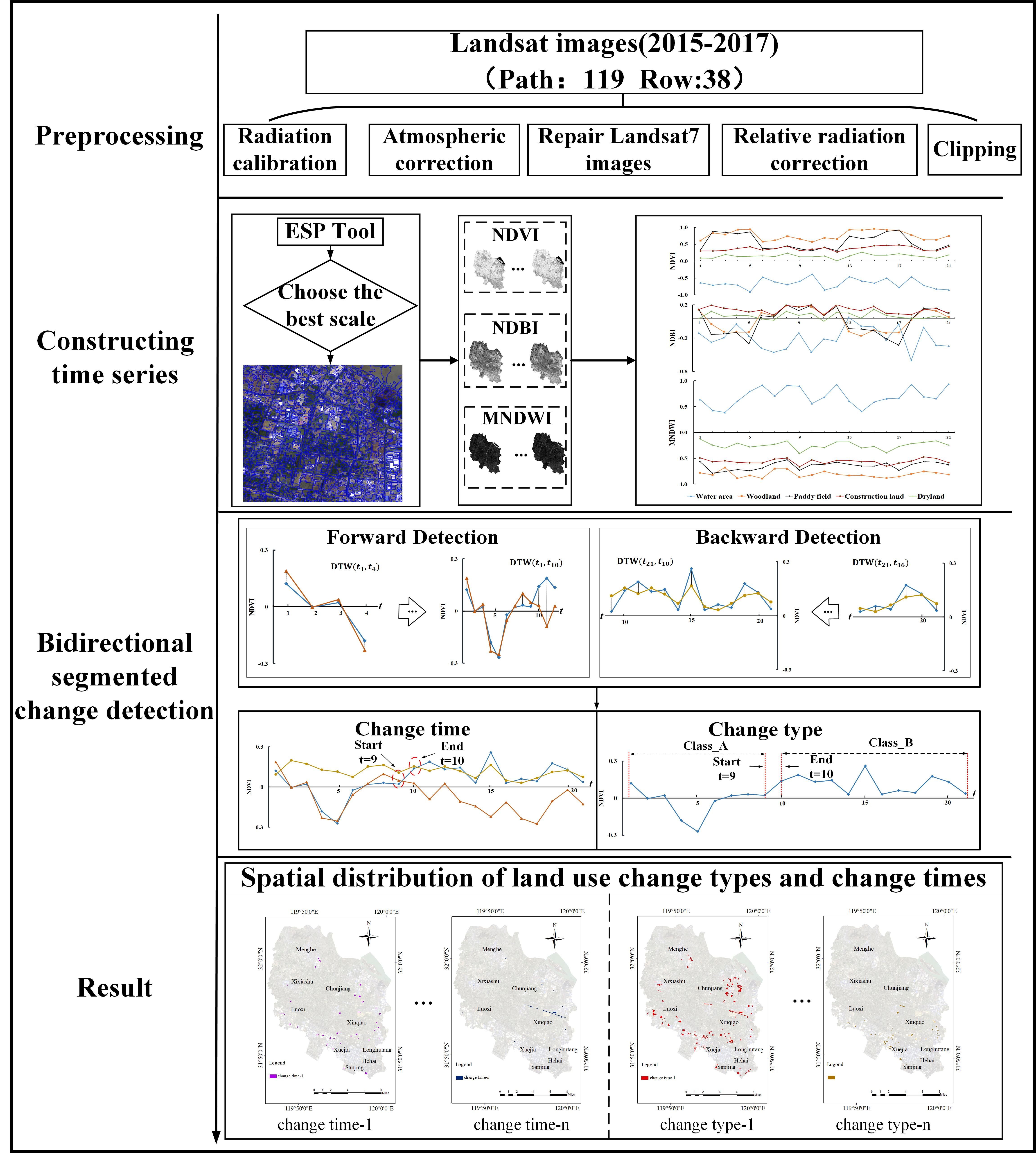
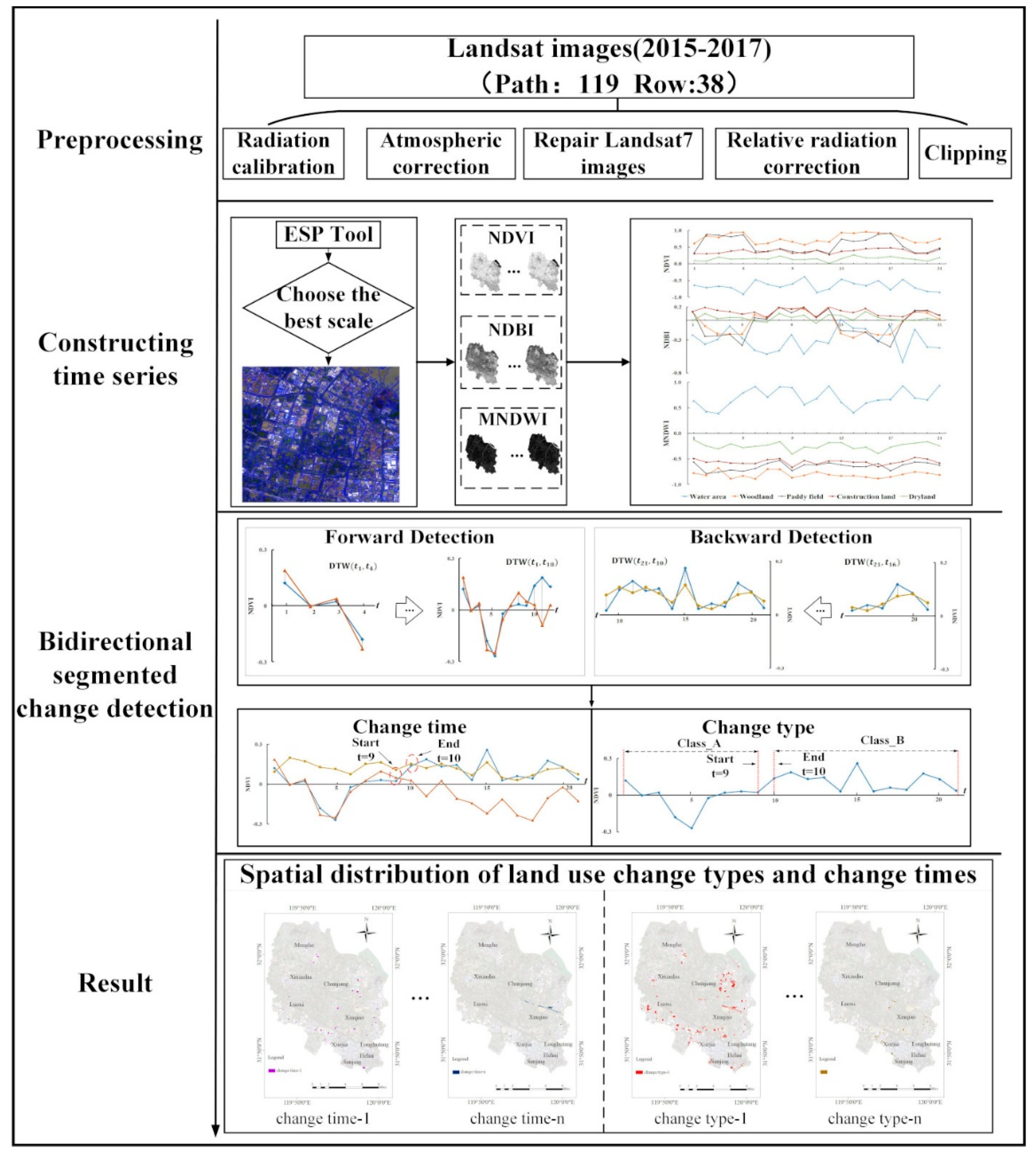
3.1. Overall Method Concept
- (1)
- Preprocess remote sensing images: This includes radiation and atmospheric corrections, gap-filling, and image clipping.
- (2)
- Construct object-level multivariate TS: Remote sensing images of typical phases are selected for the multiresolution segmentation of the images into several homogeneous objects. The NDVI, NDBI, and MNDWI are then used to construct the TS. The median is used instead of the mean as the representative feature of the objects.
- (3)
- Perform BSD on the segmented objects: The TS of unchanged objects of various land uses are chosen as the sample TS. Then, a sample TS curve most similar to the TS pending detection is screened. Next, forward and backward detections are used to determine the time and type of land use change.
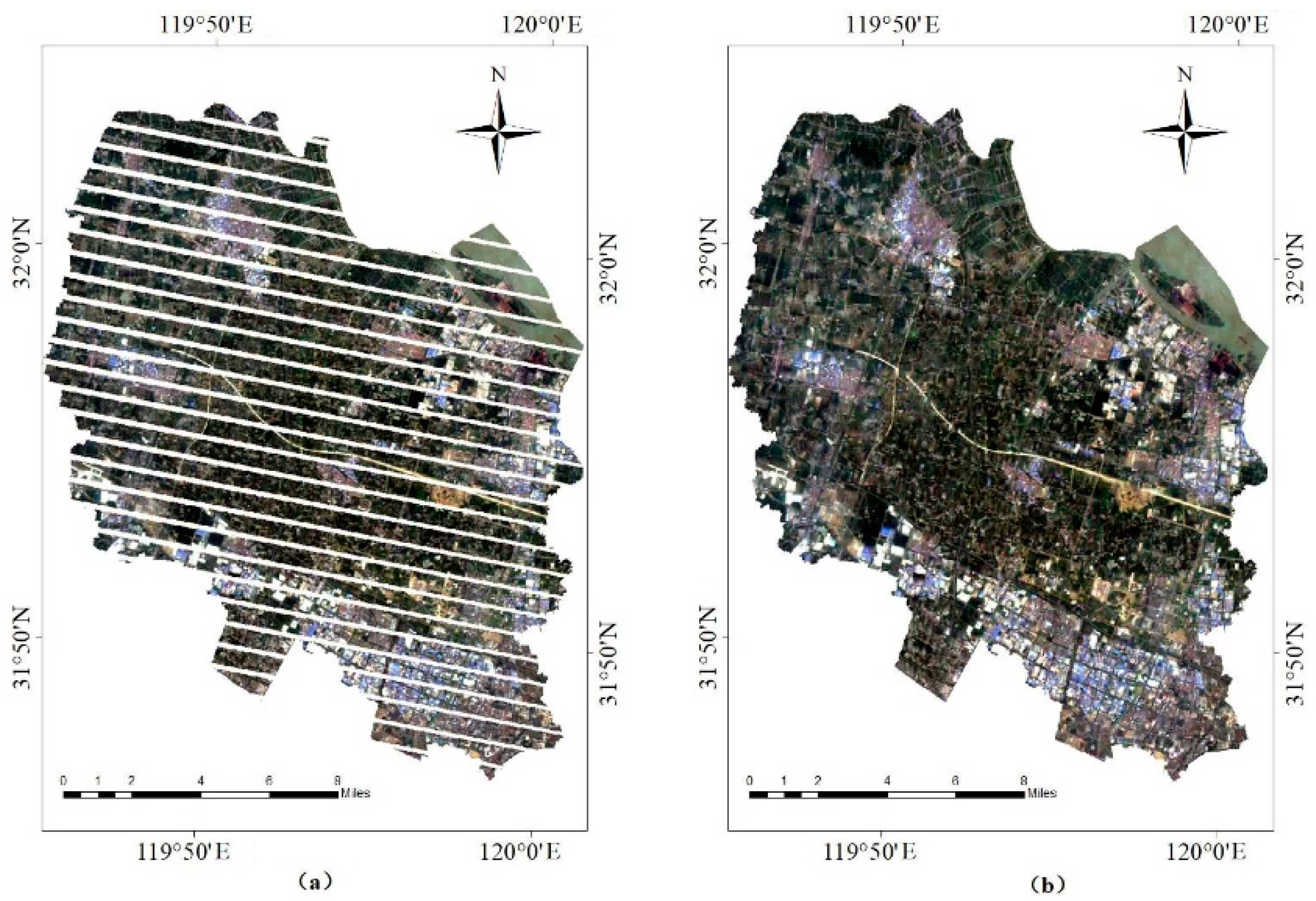
3.2. Preprocessing of Remote Sensing Images
3.3. TS Construction Based on Object Characteristics
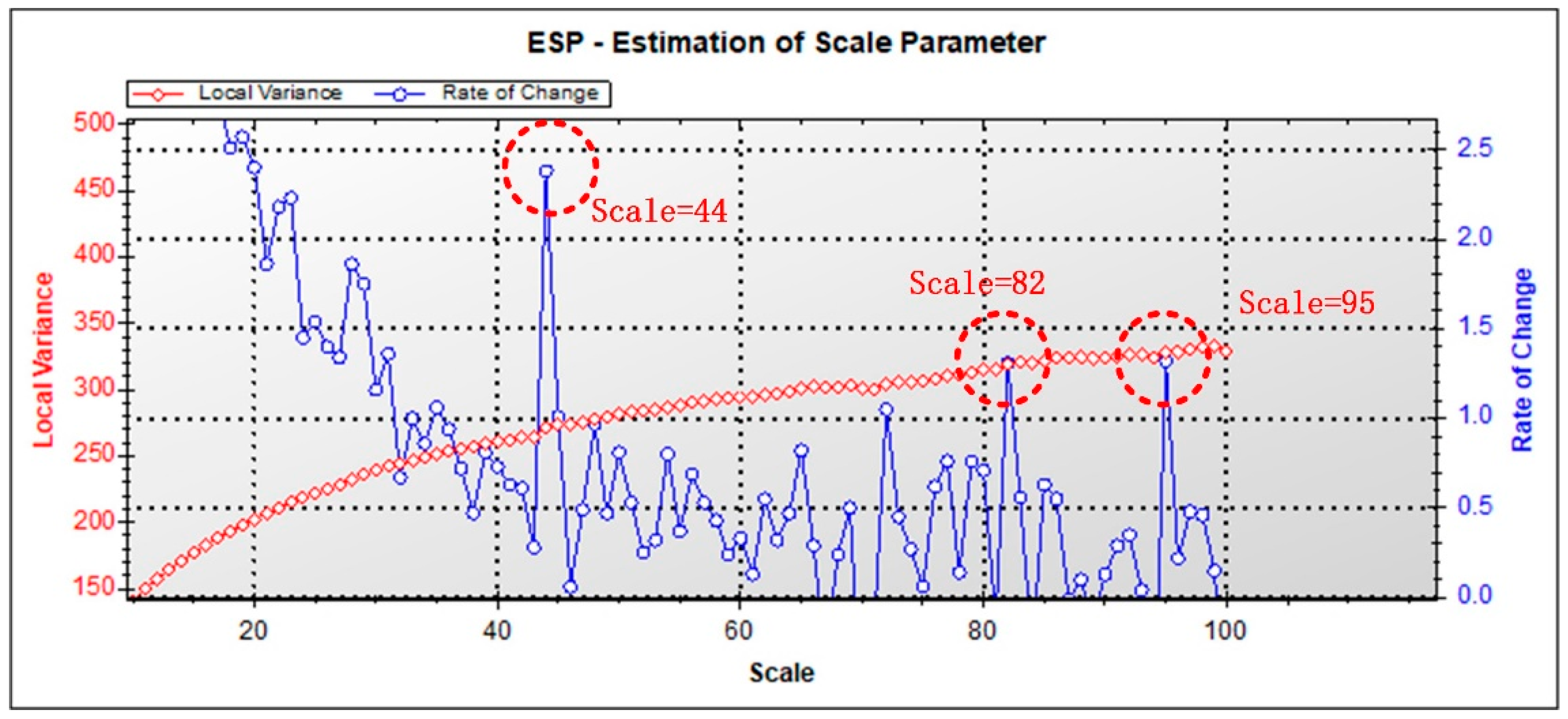
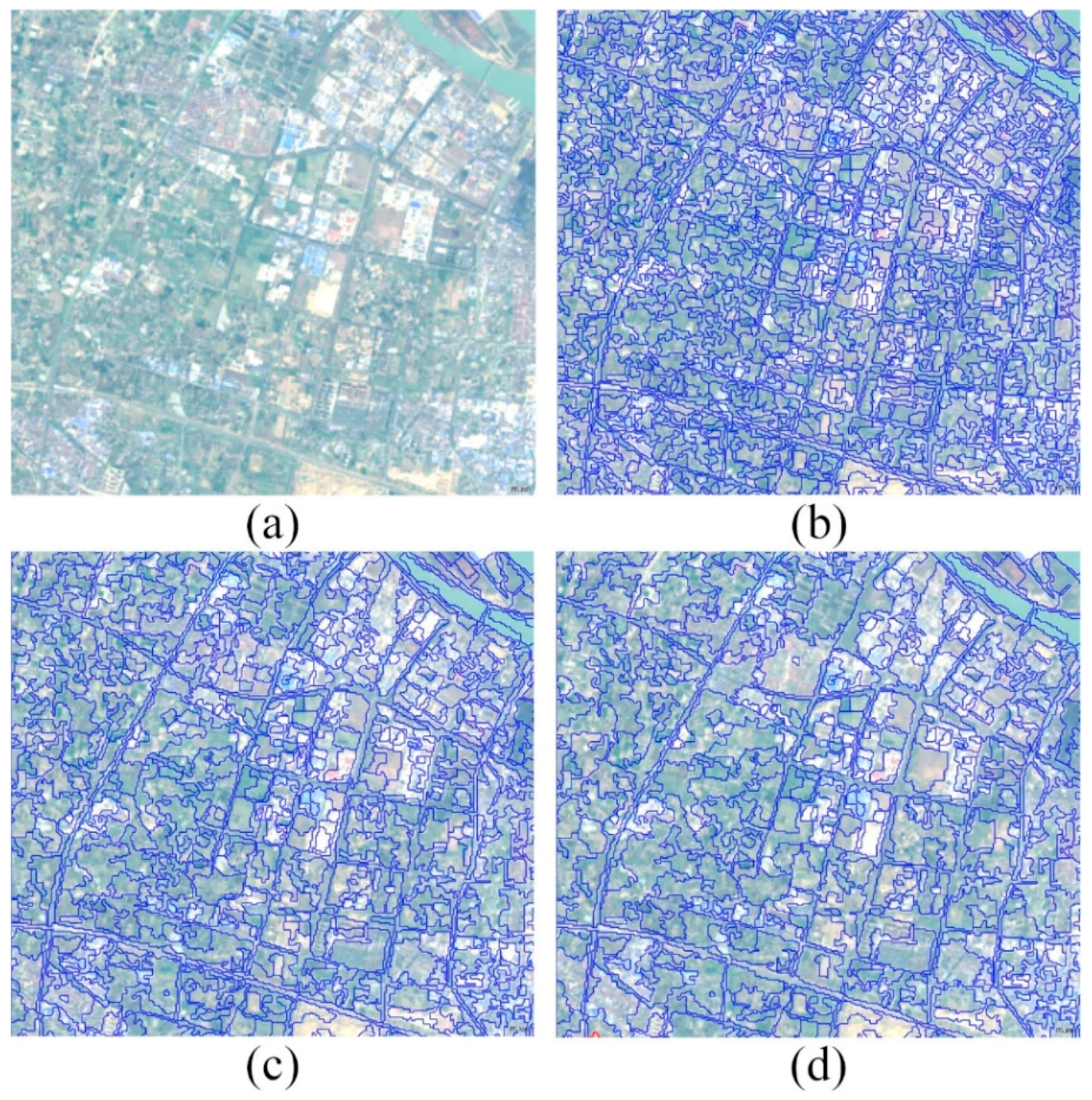
3.3.1. Multiresolution Segmentation Using TS Images
3.3.2. Construction of Multivariate TS
3.4. BSD of Segmented Object
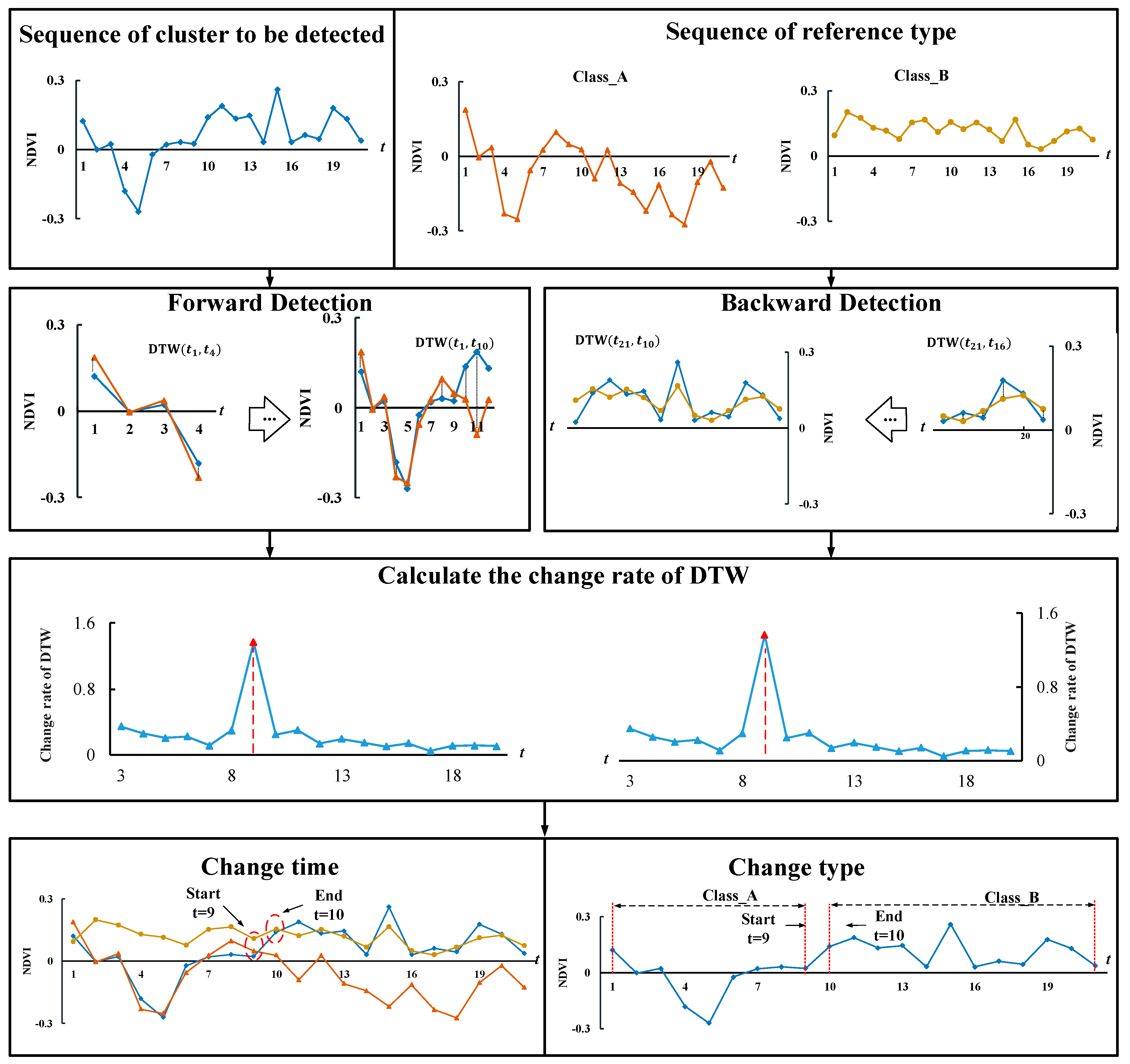
3.4.1. BSD Concept
3.4.2. Change Detection Using the BSD Method
4. Results
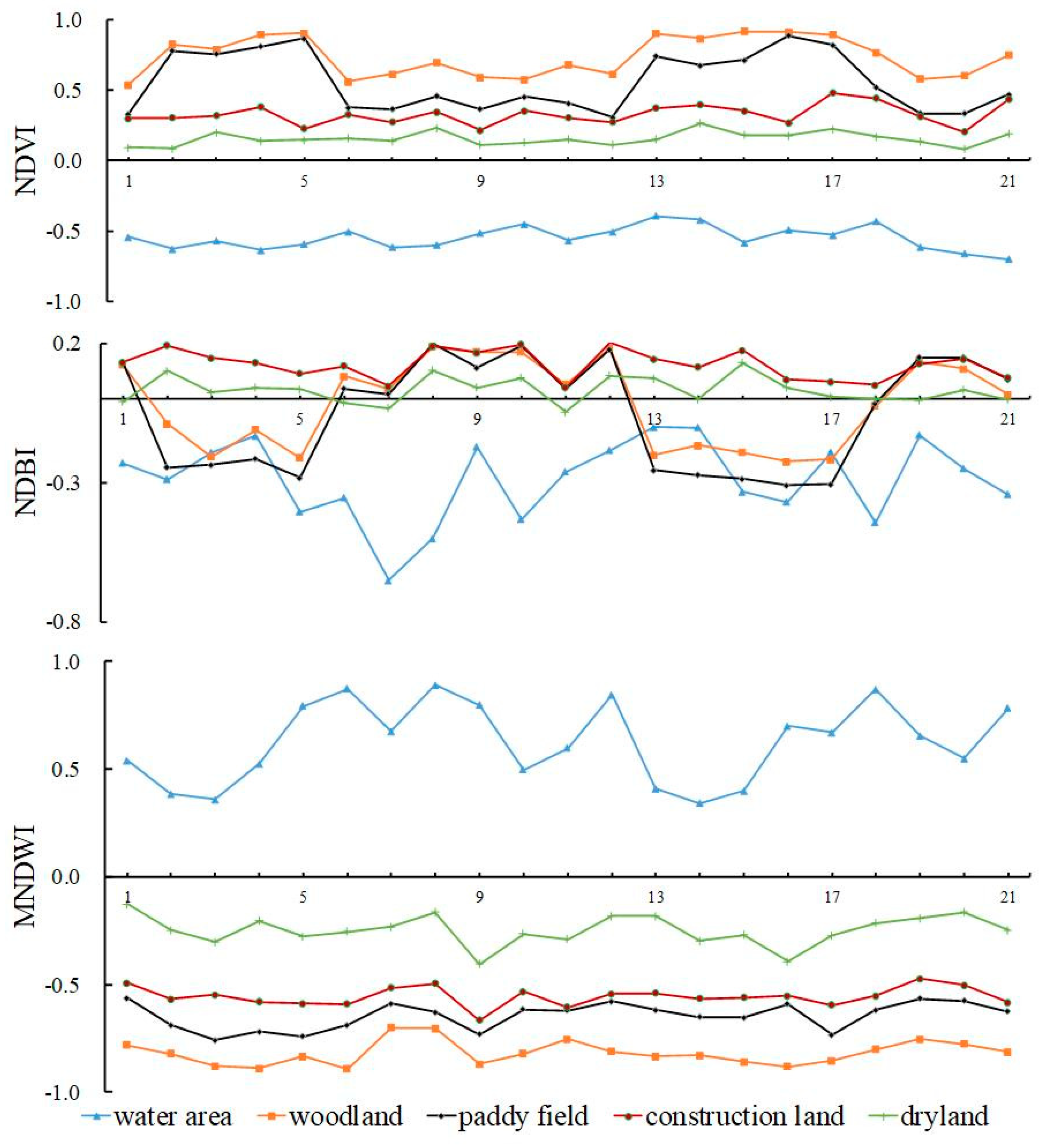
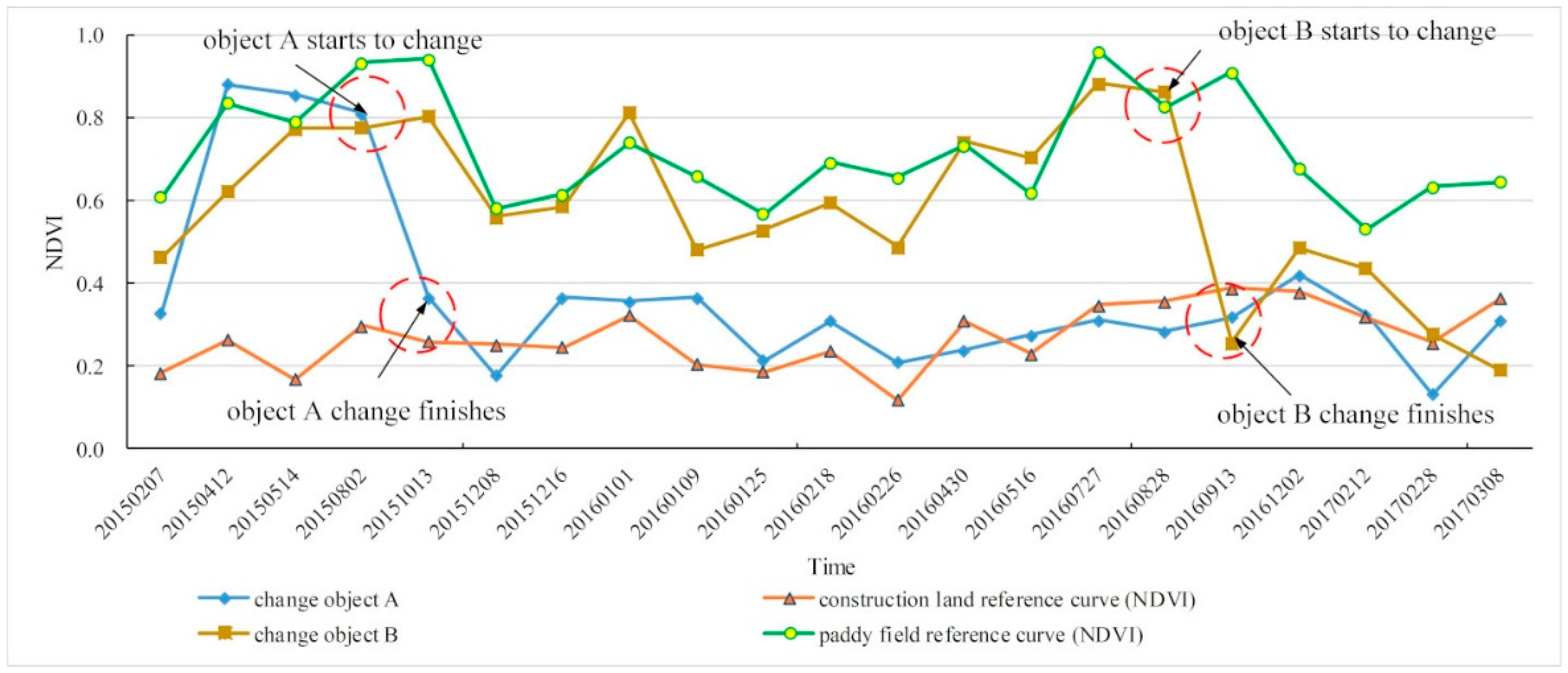
4.1. TS Characteristics of Various Land Use Types
4.2. Accuracy Evaluation of Land Use Change Detection
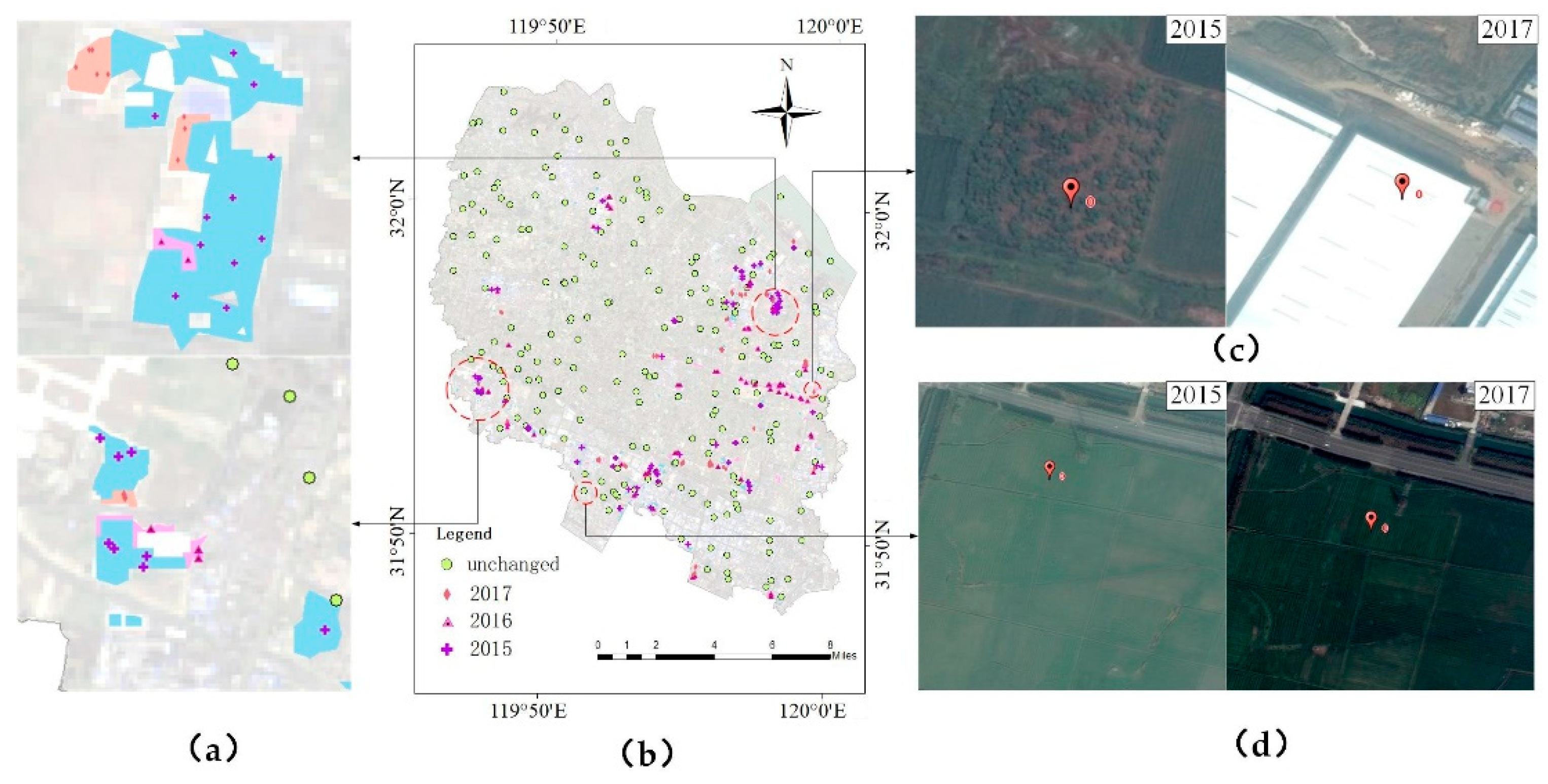
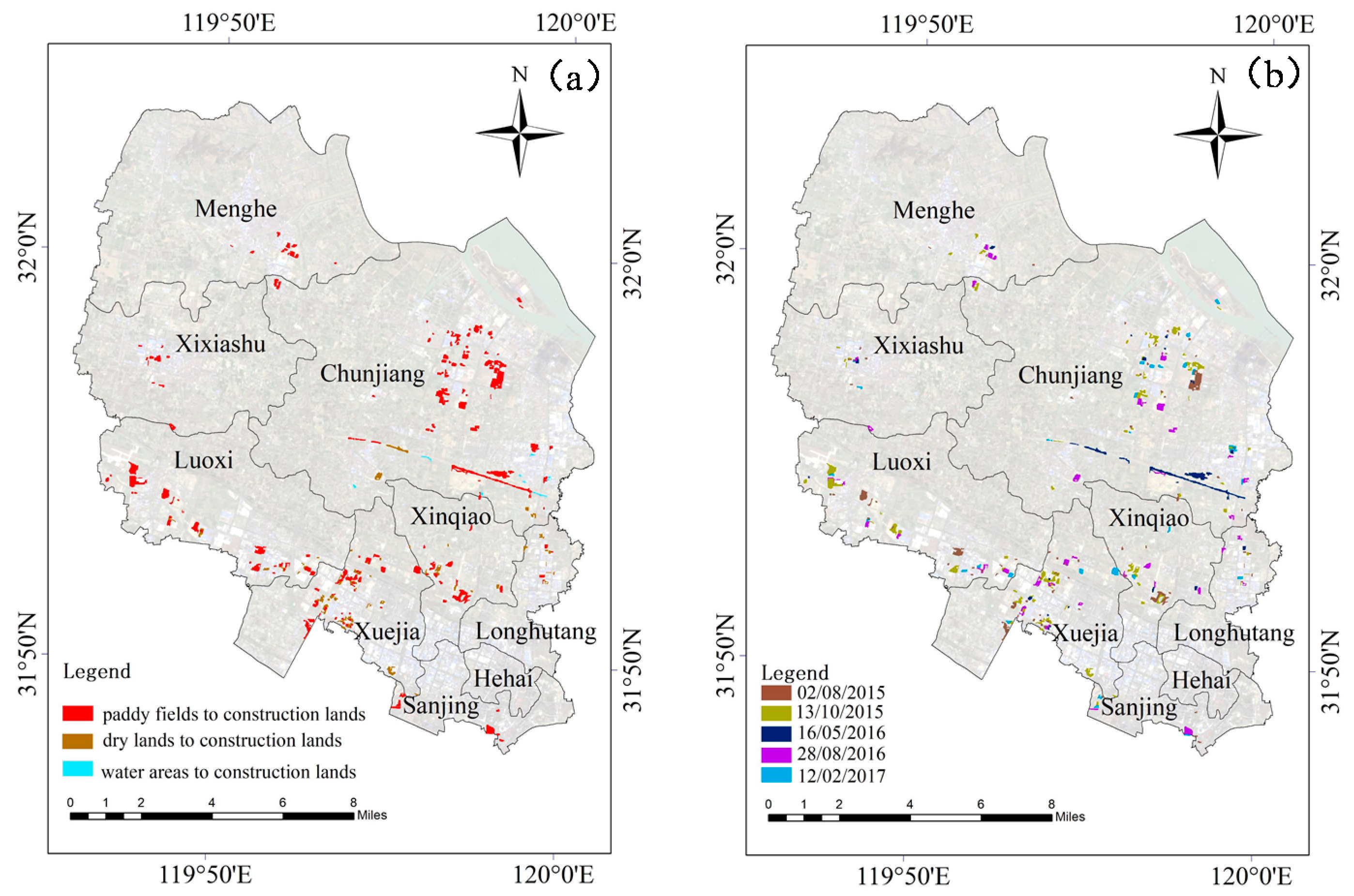
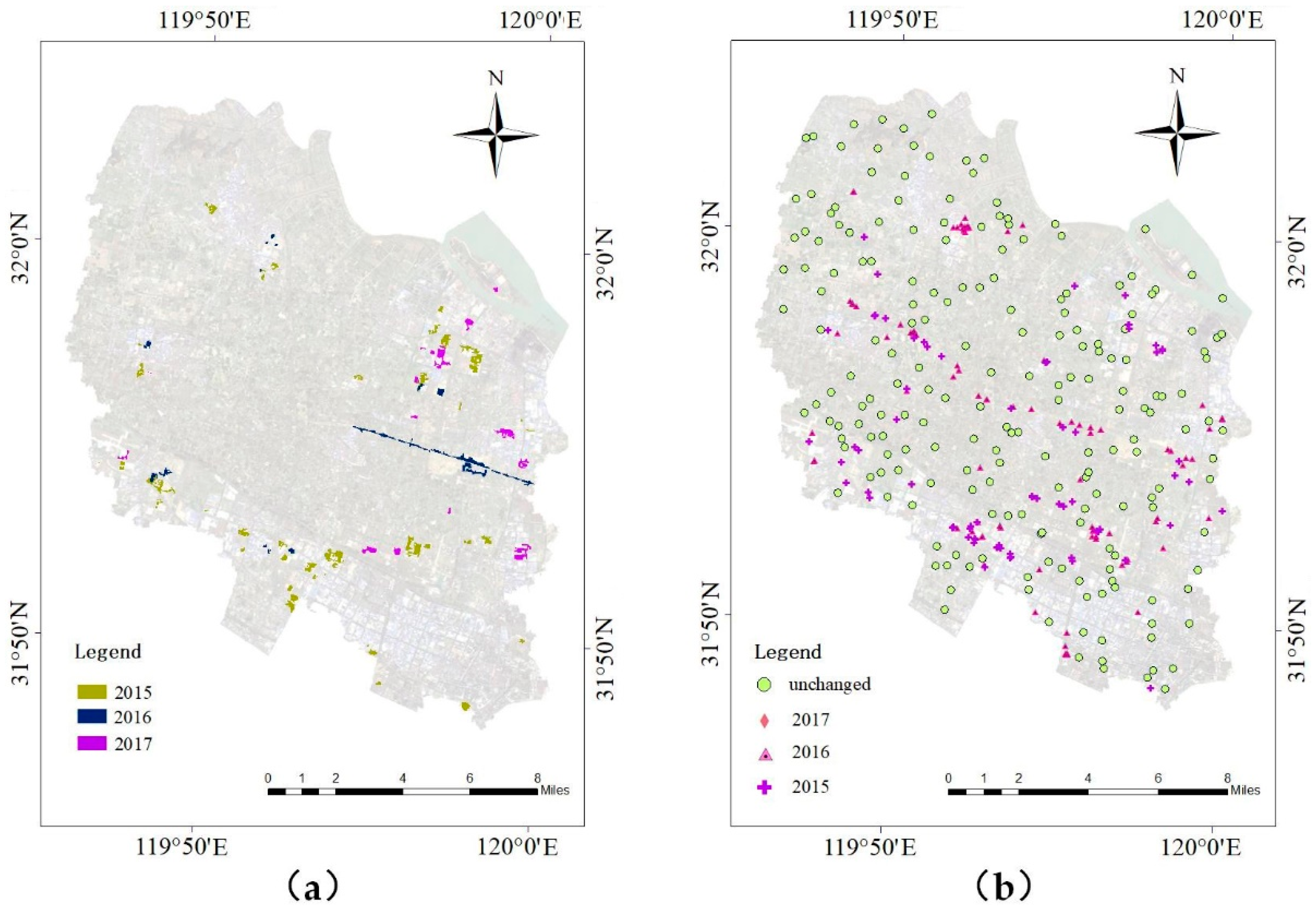
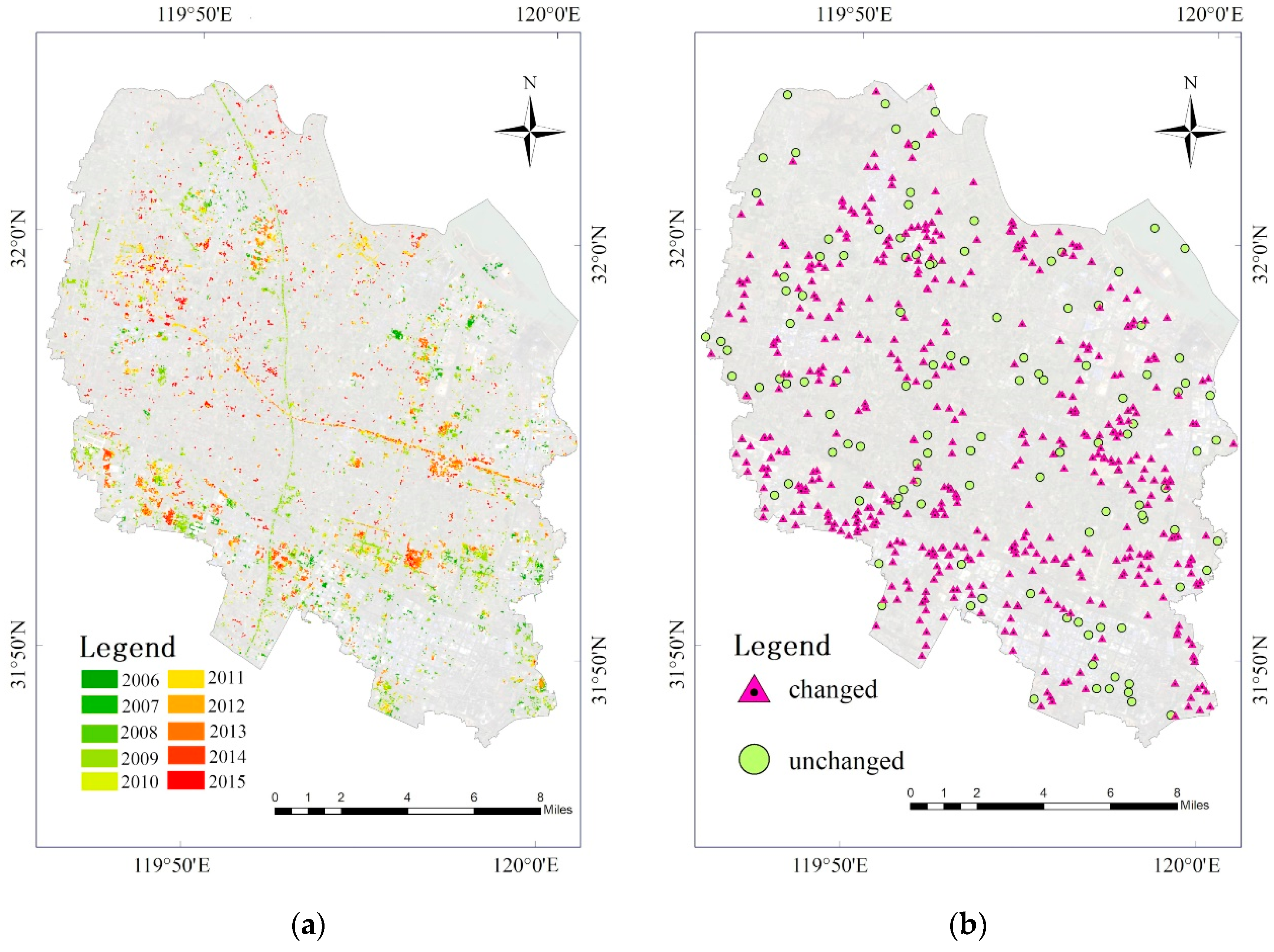
4.3. Spatiotemporal Characteristics of Land Use Change
4.4. Comparative Experiments
4.4.1. Comparisons with Results of LandTrendr Algorithm
4.4.2. Comparison with Change Detection Methods Based on TS Similarity
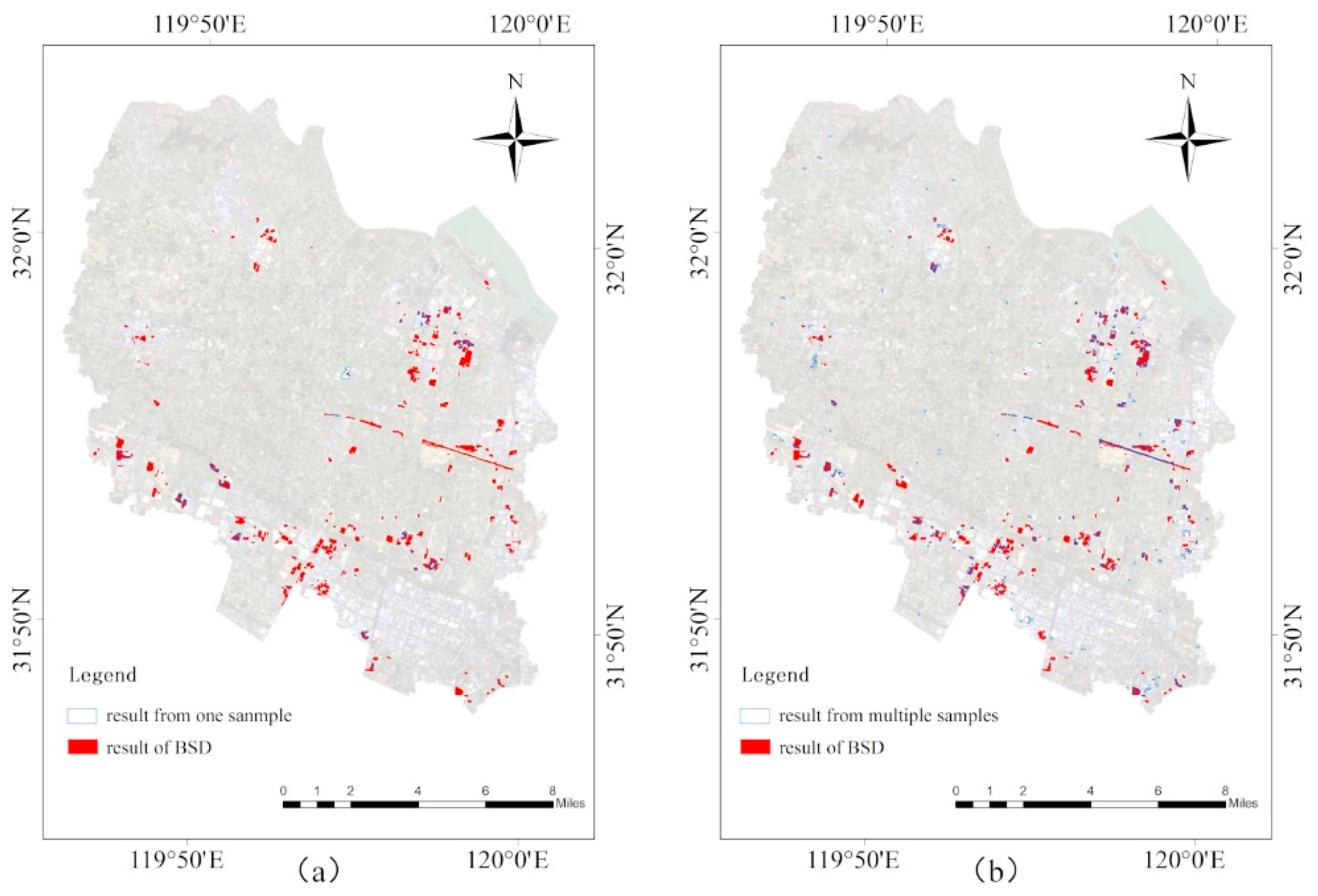
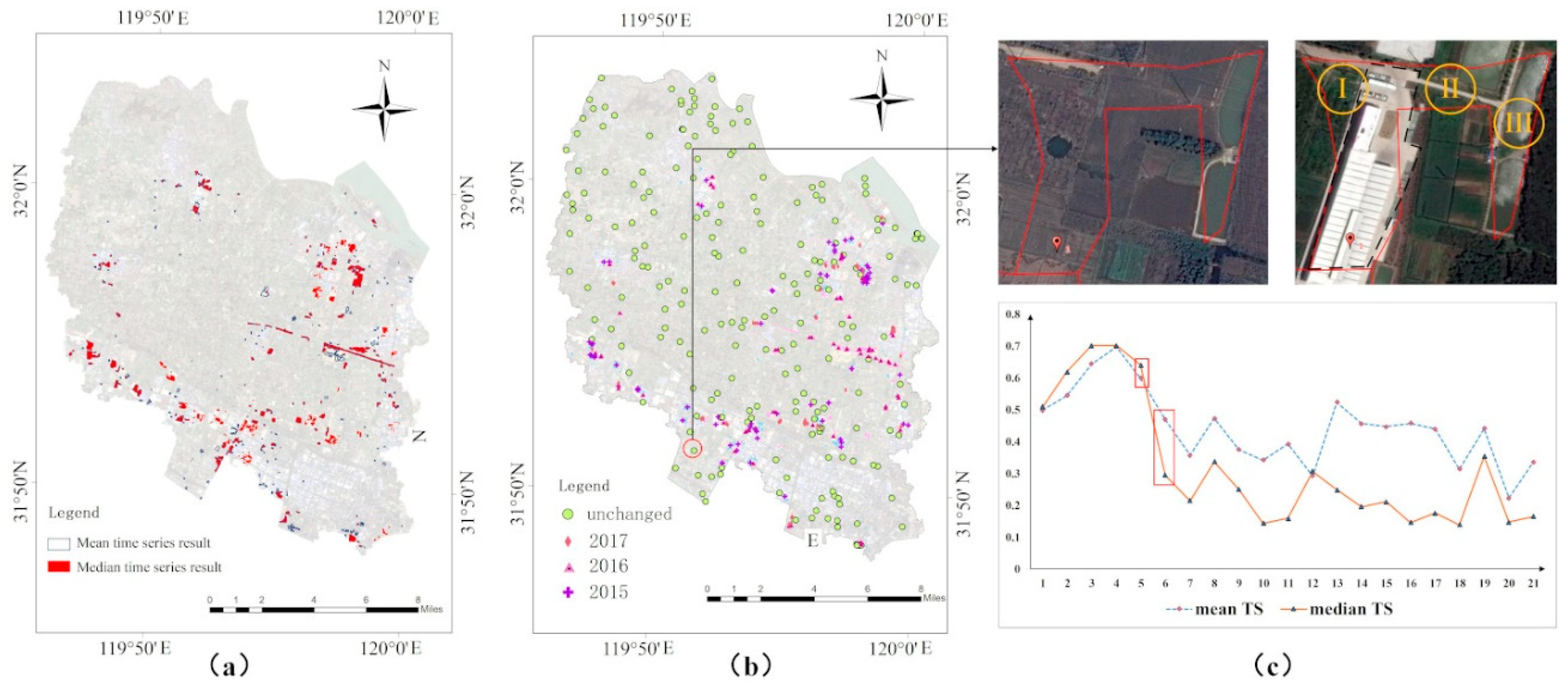
4.4.3. Comparison with Change Detection Based on Mean TS Similarity
5. Discussion
5.1. Applicability of BSD Method and Discussion of Multiple Change Detection Method
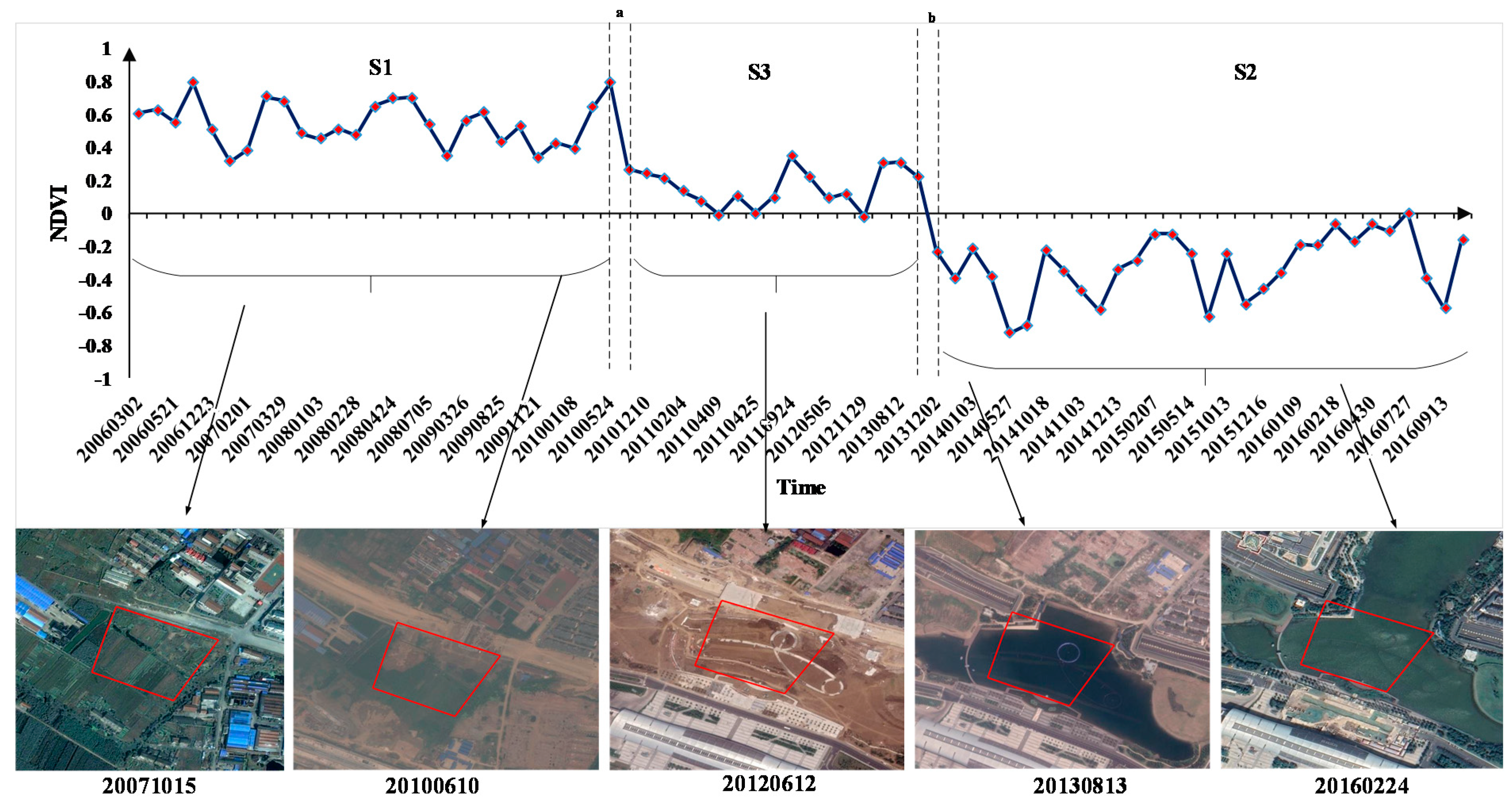
5.2. Experiment with Long TS
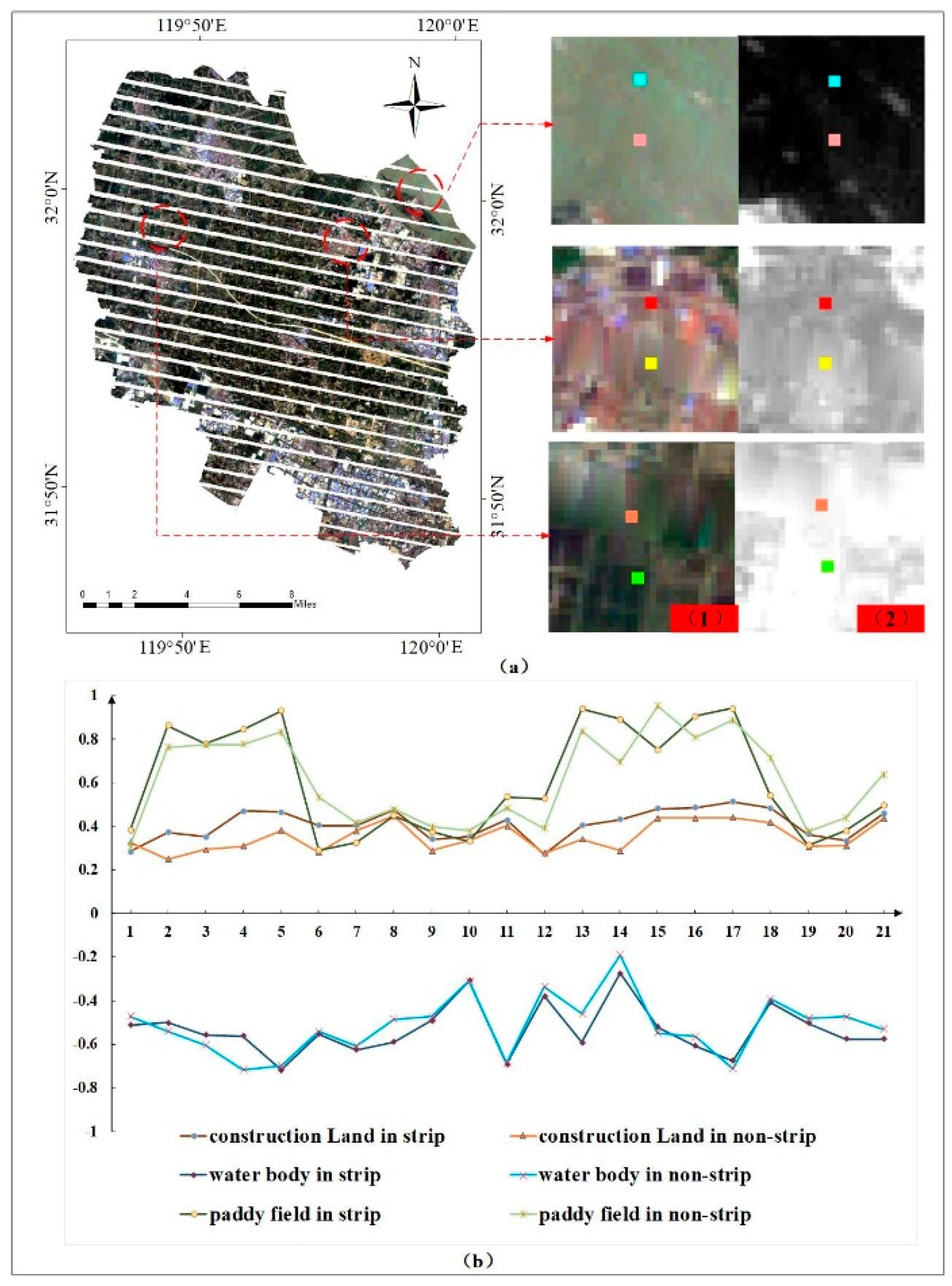
5.3. Influence of Gap-Filled Area on Change Detection
6. Conclusions
- The proposed BSD method can effectively detect the type and time of an object’s change. Multitemporal images were segmented and the 3D DTW method was adopted to detect the generated object and samples with unchanged land use via the BSD method. The results show that this method can be used to identify objects that have undergone land use changes with an overall accuracy of 90.49% and a Kappa coefficient of 0.86. Moreover, the method has good scalability for a long TS.
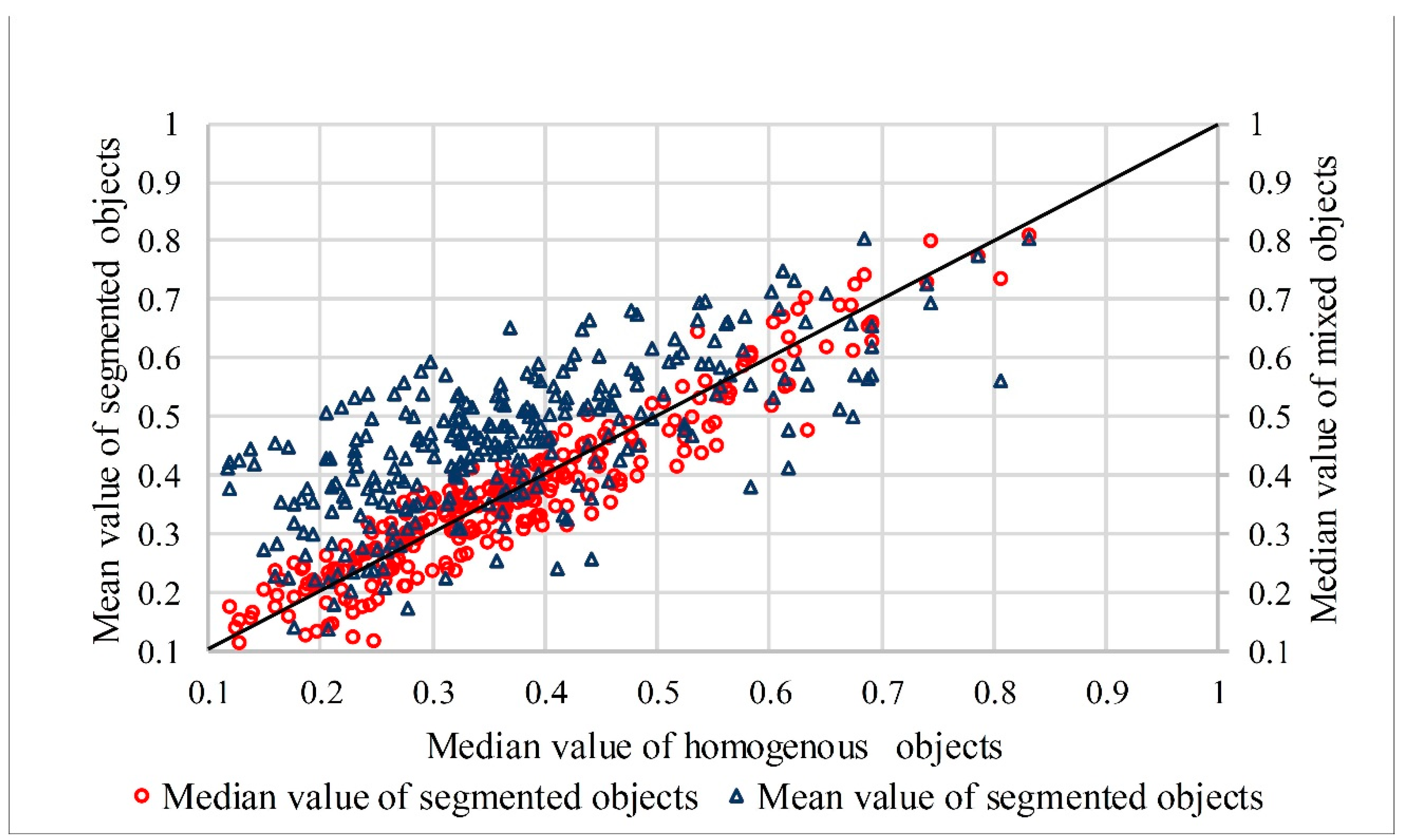
- The median index of a segmented object is more representative than the commonly used mean. Although the overall accuracy of the mean TS reached 83.17%, both the omission and the commission were approximately 15%. Objects generated via image segmentation contain clusters of similar pixels. However, differences in the index values between an object’s edge and internal pixels were especially prominent. The median index of the pixels of objects can better extract the main features of object timing and enhance the stability of timing analysis.
- In the Xinbei District from 2015–2017, the main types of land use change were the conversion of paddy fields, dry land, and water areas to construction land; the change from paddy fields to construction land accounted for 73.15% of the total area changed. In terms of spatial distribution, these changes mostly occurred in areas with rapid economic development. These changes were also near transportation hubs and in urban centers, where the demand for expansion was higher. The times of change were mainly concentrated in summer and fall.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Turner, B.; Moss, R.H.; Skole, D.L. Relating Land Use and Global Land-Cover Change: A Proposal for an IGBP-HDP Core Project. Global Change Report 1993. Available online: https://bit.ly/2ScdeL6 (accessed on 31 January 2020).
- Vitousek, P.M. Beyond Global Warming: Ecology and Global Change. Ecology 1994, 75, 1861–1876. [Google Scholar] [CrossRef]
- Li, M.; Stein, A.; Bijker, W.; Zhan, Q. Urban land use extraction from Very High Resolution remote sensing imagery using a Bayesian network. ISPRS J. Photogramm. Remote. Sens. 2016, 122, 192–205. [Google Scholar] [CrossRef]
- Chen, Y.; Lu, D.; Luo, L.; Pokhrel, Y.; Deb, K.; Huang, J.; Ran, Y. Detecting irrigation extent, frequency, and timing in a heterogeneous arid agricultural region using MODIS time series, Landsat imagery, and ancillary data. Remote. Sens. Environ. 2018, 204, 197–211. [Google Scholar] [CrossRef]
- El-Asmar, H.M.; Hereher, M.E.; El Kafrawy, S.B. Surface area change detection of the Burullus Lagoon, North of the Nile Delta, Egypt, using water indices: A remote sensing approach. Egypt. J. Remote. Sens. Space Sci. 2013, 16, 119–123. [Google Scholar] [CrossRef] [Green Version]
- Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W. An integrated Landsat time series protocol for change detection and generation of annual gap-free surface reflectance composites. Remote. Sens. Environ. 2015, 158, 220–234. [Google Scholar] [CrossRef]
- Gómez, C.; White, J.C.; Wulder, M.A. Optical remotely sensed time series data for land cover classification: A review. ISPRS J. Photogramm. Remote. Sens. 2016, 116, 55–72. [Google Scholar] [CrossRef] [Green Version]
- Long, J.A.; Lawrence, R.L.; Greenwood, M.C.; Marshall, L.; Miller, P.R. Object-oriented crop classification using multitemporal ETM+ SLC-off imagery and random forest. GISci. Remote Sens. 2013, 50, 418–436. Available online: https://bit.ly/3aZoCCI (accessed on 31 January 2020). [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote. Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Zhang, J.; Yang, Z.; Aljaddani, A.H.; Cohen, W.B.; Qiu, S.; Zhou, C. Continuous monitoring of land disturbance based on Landsat time series. Remote. Sens. Environ. 2019, 111116. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, Y.; Li, M.; Zhong, L.; Wang, J. Generation of Pixel-Level SAR Image Time Series Using a Locally Adaptive Matching Technique. Photogram. Eng. Remote Sens. 2014, 80, 839–848. [Google Scholar] [CrossRef]
- Wang, W.; Chen, Z.; Li, X.; Tang, H.; Huang, Q.; Qu, L. Detecting spatio-temporal and typological changes in land use from Landsat image time series. J. Appl. Remote Sens. 2017, 11, 035006. [Google Scholar] [CrossRef]
- Shang, R.; Liu, R.; Xu, M.; Liu, Y.; Zuo, L.; Ge, Q. The relationship between threshold-based and inflexion-based approaches for extraction of land surface phenology. Remote Sens. Environ. 2017, 199, 167–170. [Google Scholar] [CrossRef]
- Ney, H.; Ortmanns, S. Dynamic programming search for continuous speech recognition. IEEE Signal Process. Mag. 1999, 16, 64–83. [Google Scholar] [CrossRef] [Green Version]
- Petitjean, F.; Inglada, J.; Gancarski, P. Satellite Image Time Series Analysis Under Time Warping. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3081–3095. [Google Scholar] [CrossRef]
- Keogh, E.; Ratanamahatana, C.A. Exact indexing of dynamic time warping. Knowl. Inf. Syst. 2005, 7, 358–386. [Google Scholar] [CrossRef]
- Chen, Y.-L.; Wu, S.-Y.; Wang, Y.-C. Discovering multi-label temporal patterns in sequence databases. Inf. Sci. 2011, 181, 398–418. [Google Scholar] [CrossRef]
- Lee, A.J.T.; Chen, Y.-A.; Ip, W.-C. Mining frequent trajectory patterns in spatial–temporal databases. Inf. Sci. 2009, 179, 2218–2231. [Google Scholar] [CrossRef]
- Guan, X.; Huang, C.; Liu, G.; Meng, X.; Liu, Q. Mapping Rice Cropping Systems in Vietnam Using an NDVI-Based Time-Series Similarity Measurement Based on DTW Distance. Remote Sens. 2016, 8, 19. [Google Scholar] [CrossRef] [Green Version]
- Petitjean, F.; Weber, J. Efficient Satellite Image Time Series Analysis Under Time Warping. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1143–1147. [Google Scholar] [CrossRef]
- Yan, J.; Wang, L.; Song, W.; Chen, Y.; Chen, X.; Deng, Z. A time-series classification approach based on change detection for rapid land cover mapping. ISPRS-J. Photogramm. Remote Sens. 2019, 158, 249–262. [Google Scholar] [CrossRef]
- Jeong, Y.-S.; Jeong, M.K.; Omitaomu, O.A. Weighted dynamic time warping for time series classification. Pattern Recognit. 2011, 44, 2231–2240. [Google Scholar] [CrossRef]
- Nasrallah, A.; Baghdadi, N.; Mhawej, M.; Faour, G.; Darwish, T.; Belhouchette, H.; Darwich, S. A Novel Approach for Mapping Wheat Areas Using High Resolution Sentinel-2 Images. Sensors 2018, 18, 2089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maus, V.; Câmara, G.; Cartaxo, R.; Sanchez, A.; Ramos, F.M.; de Queiroz, G.R. A Time-Weighted Dynamic Time Warping Method for Land-Use and Land-Cover Mapping. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 3729–3739. [Google Scholar] [CrossRef]
- Faour, G.; Mhawej, M.; Nasrallah, A. Global trends analysis of the main vegetation types throughout the past four decades. Appl. Geogr. 2018, 97, 184–195. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. A Theoretical Framework for Unsupervised Change Detection Based on Change Vector Analysis in the Polar Domain. IEEE Trans. Geosci. Remote Sens. 2007, 45, 218–236. [Google Scholar] [CrossRef] [Green Version]
- Nemmour, H.; Chibani, Y. Multiple support vector machines for land cover change detection: An application for mapping urban extensions. ISPRS-J. Photogramm. Remote Sens. 2006, 61, 125–133. [Google Scholar] [CrossRef]
- Castillejo-González, I.L.; López-Granados, F.; García-Ferrer, A.; Peña-Barragán, J.M.; Jurado-Expósito, M.; de la Orden, M.S.; González-Audicana, M. Object- and pixel-based analysis for mapping crops and their agro-environmental associated measures using QuickBird imagery. Comput. Electron. Agric. 2009, 68, 207–215. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS-J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Wang, R.S.M.; Efford, N.D.; Roberts, S.A. Object-Based Approach to Integrate Remotely Sensed Data within a GIS Context for Land Use Changes Detection at Urban-Rural Fringe Areas; Cecchi, G., Engman, E.T., Zilioli, E., Eds.; SPIE: London, UK, 1997; pp. 362–370. [Google Scholar]
- Blaschke, T.; Burnett, C.; Pekkarinen, A. New contextual approaches using image segmentation for object-based classification. In Proceedings of the Remote Sensing Image Analysis: Including the Spatial Domain; Kluwer Academic Publishersa: Dordrecht, The Netherlands; Aamsterdam, The Netherlands, 2004; pp. 211–236. [Google Scholar]
- Bayramov, E.; Buchroithner, M.; Bayramov, R. Quantitative assessment of 2014–2015 land-cover changes in Azerbaijan using object-based classification of LANDSAT-8 timeseries. Model. Earth Syst. Environ. 2016, 2, 35. [Google Scholar] [CrossRef] [Green Version]
- Matton, N.; Canto, G.; Waldner, F.; Valero, S.; Morin, D.; Inglada, J.; Arias, M.; Bontemps, S.; Koetz, B.; Defourny, P. An Automated Method for Annual Cropland Mapping along the Season for Various Globally-Distributed Agrosystems Using High Spatial and Temporal Resolution Time Series. Remote Sens. 2015, 7, 13208–13232. [Google Scholar] [CrossRef] [Green Version]
- Peña-Barragán, J.M.; Ngugi, M.K.; Plant, R.E.; Six, J. Object-based crop identification using multiple vegetation indices, textural features and crop phenology. Remote Sens. Environ. 2011, 115, 1301–1316. [Google Scholar] [CrossRef]
- Zhao, M.; Zhao, Y.D. Object-oriented and multi-feature hierarchical change detection based on CVA for high-resolution remote sensing imagery. J. Remote Sens. 2018, 22, 119–131. [Google Scholar]
- Desclée, B.; Bogaert, P.; Defourny, P. Forest change detection by statistical object-based method. Remote Sens. Environ. 2006, 102, 1–11. [Google Scholar] [CrossRef]
- Whelen, T.; Siqueira, P. Use of time-series L-band UAVSAR data for the classification of agricultural fields in the San Joaquin Valley. Remote Sens. Environ. 2017, 193, 216–224. [Google Scholar] [CrossRef]
- Bontemps, S.; Bogaert, P.; Titeux, N.; Defourny, P. An object-based change detection method accounting for temporal dependences in time series with medium to coarse spatial resolution. Remote Sens. Environ. 2008, 112, 3181–3191. [Google Scholar] [CrossRef]
- Petitjean, F.; Kurtz, C.; Passat, N.; Gançarski, P. Spatio-temporal reasoning for the classification of satellite image time series. Pattern Recognit. Lett. 2012, 33, 1805–1815. [Google Scholar] [CrossRef] [Green Version]
- Masek, J.G.; Vermote, E.F.; Saleous, N.E.; Wolfe, R.; Lim, T.K. A Landsat Surface Reflectance Data Set for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett. 2006, 3, 68–72. [Google Scholar]
- Yin, H.; Prishchepov, A.V.; Kuemmerle, T.; Bleyhl, B.; Buchner, J.; Radeloff, V.C. Mapping agricultural land abandonment from spatial and temporal segmentation of Landsat time series. Remote Sens. Environ. 2018, 210, 12–24. [Google Scholar] [CrossRef]
- Pat Scaramuzza; Esad Micijevic; Gyanesh Chander SLC Gap-Filled Products Phase One Methodology. Available online: http://landsat.usgs.gov/documents/SLC_Gap_Fill_Methodology.pdf. (accessed on 20 June 2012).
- Mozumder, C.; Reddy, K.V.; Pratap, D. Air Pollution Modeling from Remotely Sensed Data Using Regression Techniques. J. Indian Soc. Remote Sens. 2013, 41, 269–277. [Google Scholar] [CrossRef]
- Vlassova, L.; Pérez-Cabello, F. Effects of post-fire wood management strategies on vegetation recovery and land surface temperature (LST) estimated from Landsat images. Int. J. Appl. Earth Obs. Geoinf. 2016, 44, 171–183. [Google Scholar] [CrossRef]
- Romero-Sanchez, M.E.; Ponce-Hernandez, R.; Franklin, S.E.; Aguirre-Salado, C.A. Comparison of data gap-filling methods for Landsat ETM+ SLC-off imagery for monitoring forest degradation in a semi-deciduous tropical forest in Mexico. Int. J. Remote Sens. 2015, 36, 2786–2799. [Google Scholar] [CrossRef]
- Baatz, M.; Schäpe, A. Multiresolution Segmentation: An optimization approach for high quality multi-scale image segmentation. Beiträge zum AGIT-Symposium 2000, 12, 12–23. [Google Scholar]
- Drăguţ, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS-J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Myint, S.W.; Gober, P.; Brazel, A.; Grossman-Clarke, S.; Weng, Q. Per-pixel vs. object-based classification of urban land cover extraction using high spatial resolution imagery. Remote Sens. Environ. 2011, 115, 1145–1161. [Google Scholar] [CrossRef]
- Shen, L.; Wu, L.; Dai, Y.; Qiao, W.; Wang, Y. Topic Modelling for Object-Based Unsupervised Classification of VHR Panchromatic Satellite Images Based on Multiscale Image Segmentation. Remote Sens. 2017, 9, 840. [Google Scholar] [CrossRef] [Green Version]
- Laliberte, A.S.; Rango, A. Texture and Scale in Object-Based Analysis of Subdecimeter Resolution Unmanned Aerial Vehicle (UAV) Imagery. IEEE Trans. Geosci. Remote Sens. 2009, 47, 761–770. [Google Scholar] [CrossRef] [Green Version]
- Johnson, B.; Xie, Z. Unsupervised image segmentation evaluation and refinement using a multi-scale approach. ISPRS-J. Photogramm. Remote Sens. 2011, 66, 473–483. [Google Scholar] [CrossRef]
- Kim, M.; Warner, T.A.; Madden, M.; Atkinson, D.S. Multi-scale GEOBIA with very high spatial resolution digital aerial imagery: Scale, texture and image objects. Int. J. Remote Sens. 2011, 32, 2825–2850. [Google Scholar] [CrossRef]
- Drăguţ, L.; Eisank, C. Automated object-based classification of topography from SRTM data. Geomorphology 2012, 141–142, 21–33. [Google Scholar] [CrossRef] [Green Version]
- Shi, P.; Yongfu, C.; Hua, L. Parameters of Multi-Segmentation based on Segmentation Evaluation Function. Remote Sens. Tec. Appl. 2018, 33, 628–637. [Google Scholar]
- Cui, W.; Gao, L.; Le, W.; Li, D. Study on geographic ontology based on object-oriented remote sensing analysis. In Proceedings of the International Conference on Earth Observation Data Processing and Analysis (ICEODPA), Wuhan, China, 29 December 2008. [Google Scholar]
- Sasaki, T.; Imanishi, J.; Ioki, K.; Morimoto, Y.; Kitada, K. Object-based classification of land cover and tree species by integrating airborne LiDAR and high spatial resolution imagery data. Landscape Ecol. Eng. 2012, 8, 157–171. [Google Scholar] [CrossRef]
- Ma, L.; Cheng, L.; Li, M.; Liu, Y.; Ma, X. Training set size, scale, and features in Geographic Object-Based Image Analysis of very high resolution unmanned aerial vehicle imagery. ISPRS-J. Photogramm. Remote Sens. 2015, 102, 14–27. [Google Scholar] [CrossRef]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS-J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Munyati, C.; Ratshibvumo, T.; Ogola, J. Landsat TM image segmentation for delineating geological zone correlated vegetation stratification in the Kruger National Park, South Africa. Phys. Chem. Earth Parts A/B/C 2013, 55–57, 1–10. [Google Scholar] [CrossRef]
- Wang, B.; Chen, Z.; Zhu, A.-X.; Hao, Y.; Xu, C. Multi-Level Classification Based on Trajectory Features of Time Series for Monitoring Impervious Surface Expansions. Remote Sens. 2019, 11, 640. [Google Scholar] [CrossRef] [Green Version]
- Han, N.; Wu, J.; Tahmassebi, A.R.S.; Xu, H.; Wang, K. NDVI-Based Lacunarity Texture for Improving Identification of Torreya Using Object-Oriented Method. Agric. Sci. China 2011, 10, 1431–1444. [Google Scholar] [CrossRef]
- Gamanya, R.; De Maeyer, P.; De Dapper, M. Object-oriented change detection for the city of Harare, Zimbabwe. Expert Syst. Appl. 2009, 36, 571–588. [Google Scholar] [CrossRef]
- Seto, K.C.; Fragkias, M. Quantifying Spatiotemporal Patterns of Urban Land-use Change in Four Cities of China with Time Series Landscape Metrics. Landsc. Ecol. 2005, 20, 871–888. [Google Scholar] [CrossRef]
- Qian, J.P.; Li, X.; Yeh, A.G.; Ai, B.; Liu, K.; Chen, X.Y. Radarsat Time Series Analysis and Short-time Change Detection of Regional Land-use/Land-cover. J. Remote Sens. 2007, 11, 931–940. [Google Scholar]
- Tan, Y.; Bai, B.; Mohammad, M.S. Time series remote sensing based dynamic monitoring of land use and land cover change. In Proceedings of the IEEE 2016 4th International Workshop on Earth Observation and Remote Sensing Applications (EORSA), Guangzhou, China, 4–6 July 2016; pp. 202–206. [Google Scholar]
- Congalton, R.G. Considerations And Techniques For Assessing The Accuracy of Remotely Sensed Data. In Proceedings of the IEEE 12th Canadian Symposium on Remote Sensing Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 10–14 July 1989; Volume 3, pp. 1847–1850. [Google Scholar]
- Foody, G.M. Assessing the accuracy of land cover change with imperfect ground reference data. Remote Sens. Environ. 2010, 114, 2271–2285. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr—Temporal segmentation algorithms. Remote Sens. Environ. 2010, 114, 2897–2910. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Date (Day/Month/Year) | Image Number | Image Type | Cloud (%) | Image Date (Day/Month/Year) | Image Number | Image Type | Cloud (%) |
|---|---|---|---|---|---|---|---|
| 07/02/2015 | 1 | LE7 | 20.72 | 26/02/2016 | 12 | LE7 | 12.78 |
| 12/04/2015 | 2 | LE7 | 22.61 | 30/04/2016 | 13 | LE7 | 0.01 |
| 14/05/2015 | 3 | LE7 | 4.76 | 16/05/2016 | 14 | LE7 | 0.22 |
| 02/08/2015 | 4 | LE7 | 0.19 | 27/07/2016 | 15 | LC8 | 5.05 |
| 13/10/2015 | 5 | LC8 | 4.37 | 28/08/2016 | 16 | LC8 | 4..10 |
| 08/12/2015 | 6 | LE7 | 1.09 | 13/09/2016 | 17 | LC8 | 24.70 |
| 16/12/2015 | 7 | LC8 | 6.60 | 02/12/2016 | 18 | LC8 | 13.19 |
| 01/01/2016 | 8 | LC8 | 3.23 | 12/02/2017 | 19 | LE7 | 12.19 |
| 09/01/2016 | 9 | LE7 | 0.77 | 28/02/2017 | 20 | LE7 | 6.56 |
| 25/01/2016 | 10 | LE7 | 5.57 | 08/03/2017 | 21 | LC8 | 7.66 |
| 18/02/2016 | 11 | LC8 | 9.71 | ||||
| Land Use/land Covers | Description |
|---|---|
| Water area | Rivers, lakes, canals, channels, and reservoirs |
| Woodland | Forests, orchards, and shrubbery |
| Paddy field | Land used regularly to store aquatic crops such as rice, with obvious seasonal variation characteristics |
| Construction land | Cities, rural residential areas, roads, railways, etc. |
| Dryland | Land relying on natural precipitation to cultivate dry crops, along with idle wasteland, bare land, etc. |
| Land-Use/Land-Cover Type | High-Resolution Images of Sample | NDVI of Sample | Statistical Results of Sample |
|---|---|---|---|
| Construction land |  |  |  |
| Construction land |  |  |  |
| Construction land |  |  |  |
| Construction land |  |  |  |
| Woodland |  |  |  |
| Water area |  |  |  |
| Dryland |  |  |  |
| Paddy field |  |  |  |
| Seg. Level | Scale | Wshape | Wcompactness | Wimage Layer | Number of Objects Produced |
|---|---|---|---|---|---|
| Level 1 | 44 | 0.2 | 0.5 | 1 | 10,639 |
| Level 2 | 82 | 0.2 | 0.5 | 1 | 4572 |
| Level 3 | 95 | 0.2 | 0.5 | 1 | 3334 |
| Detection Results | Reference Data | User Accuracy (%) | |||
|---|---|---|---|---|---|
| Unchanged | 2015 | 2016 | 2017 | ||
| Unchanged | 188 | 5 | 2 | 5 | 94.00 |
| 2015 | 1 | 62 | 6 | 1 | 88.57 |
| 2016 | 3 | 5 | 60 | 2 | 85.71 |
| 2017 | 2 | 3 | 4 | 61 | 87.14 |
| Producer accuracy (%) | 96.91 | 82.67 | 83.33 | 88.41 | |
| Detection Results | Reference Data | User Accuracy (%) | |||
|---|---|---|---|---|---|
| Unchanged | 2015 | 2016 | 2017 | ||
| Unchanged | 172 | 11 | 8 | 9 | 86.00 |
| 2015 | 2 | 59 | 6 | 3 | 84.29 |
| 2016 | 3 | 6 | 56 | 5 | 80.00 |
| 2017 | 2 | 4 | 5 | 59 | 84.29 |
| Producer accuracy (%) | 96.09 | 73.75 | 74.67 | 77.63 | |
| Detection Results | Reference Data | User Accuracy (%) | |||
|---|---|---|---|---|---|
| Unchanged | 2015 | 2016 | 2017 | ||
| Unchanged | 167 | 10 | 10 | 13 | 83.50 |
| 2015 | 2 | 61 | 3 | 4 | 87.14 |
| 2016 | 2 | 6 | 56 | 6 | 80.00 |
| 2017 | 1 | 5 | 7 | 57 | 81.43 |
| Producer accuracy (%) | 97.09 | 74.39 | 73.68 | 71.25 | |
| Image Date (Day/Month/Year) | Image Number | Image Type | Cloud (%) | Image Date (Day/Month/Year) | Image Number | Image Type | Cloud |
|---|---|---|---|---|---|---|---|
| 02/03/2006 | 1 | LE7 | 0.01 | 03/04/2012 | 38 | LE7 | 0.09 |
| 18/03/2006 | 2 | LE7 | 5.71 | 05/05/2012 | 39 | LE7 | 0.12 |
| 21/05/2006 | 3 | LE7 | 0.00 | 21/05/2012 | 40 | LE7 | 31.79 |
| 18/09/2006 | 4 | LT5 | 0.03 | 29/11/2012 | 41 | LE7 | 0.11 |
| 23/12/2006 | 5 | LT5 | 16.04 | 14/04/2013 | 42 | LC8 | 4.46 |
| 08/01/2007 | 6 | LT5 | 0.01 | 12/08/2013 | 43 | LE7 | 0.00 |
| 01/02/2007 | 7 | LE7 | 0.03 | 16/11/2013 | 44 | LE7 | 0.09 |
| 21/03/2007 | 8 | LE7 | 0.08 | 02/12/2013 | 45 | LE7 | 0.02 |
| 29/03/2007 | 9 | LT5 | 0.03 | 10/12/2013 | 46 | LC8 | 0.95 |
| 08/05/2007 | 10 | LE7 | 0.09 | 03/01/2014 | 47 | LE7 | 23.23 |
| 03/01/2008 | 11 | LE7 | 0.15 | 16/03/2014 | 48 | LC8 | 0.47 |
| 12/02/2008 | 12 | LT5 | 0.02 | 27/05/2014 | 49 | LE7 | 22.16 |
| 28/02/2008 | 13 | LT5 | 0.01 | 30/07/2014 | 50 | LE7 | 0.10 |
| 23/03/2008 | 14 | LE7 | 0.03 | 18/10/2014 | 51 | LE7 | 20.72 |
| 24/04/2008 | 15 | LE7 | 0.05 | 26/10/2014 | 52 | LC8 | 0.09 |
| 02/05/2008 | 16 | LT5 | 0.15 | 03/11/2014 | 53 | LE7 | 0.01 |
| 05/07/2008 | 17 | LT5 | 0.03 | 05/12/2014 | 54 | LE7 | 0.02 |
| 13/01/2009 | 18 | LT5 | 0.02 | 13/12/2014 | 55 | LC8 | 14.19 |
| 26/03/2009 | 19 | LE7 | 14.10 | 29/12/2014 | 56 | LC8 | 0.61 |
| 11/04/2009 | 20 | LE7 | 3.94 | 07/02/2015 | 57 | LE7 | 20.72 |
| 25/08/2009 | 21 | LT5 | 2.45 | 12/04/2015 | 58 | LE7 | 22.61 |
| 05/11/2009 | 22 | LE7 | 14.18 | 14/05/2015 | 59 | LE7 | 4.76 |
| 21/11/2009 | 23 | LE7 | 0.02 | 02/08/2015 | 60 | LE7 | 0.19 |
| 23/12/2009 | 24 | LE7 | 0.00 | 13/10/2015 | 61 | LC8 | 4.37 |
| 08/01/2010 | 25 | LE7 | 0.20 | 08/12/2015 | 62 | LE7 | 1.09 |
| 30/04/2010 | 26 | LE7 | 0.00 | 16/12/2015 | 63 | LC8 | 6.60 |
| 24/05/2010 | 27 | LT5 | 0.00 | 01/01/2016 | 64 | LC8 | 3.23 |
| 21/09/2010 | 28 | LE7 | 0.00 | 09/01/2016 | 65 | LE7 | 0.77 |
| 10/12/2010 | 29 | LE7 | 0.01 | 25/01/2016 | 66 | LE7 | 5.57 |
| 18/12/2010 | 30 | LT5 | 0.02 | 18/02/2016 | 67 | LC8 | 9.71 |
| 04/02/2011 | 31 | LT5 | 0.09 | 26/02/2016 | 68 | LE7 | 12.78 |
| 01/04/2011 | 32 | LE7 | 3.61 | 30/04/2016 | 69 | LE7 | 0.01 |
| 09/04/2011 | 33 | LT5 | 0.00 | 16/05/2016 | 70 | LE7 | 0.22 |
| 17/04/2011 | 34 | LE7 | 0.01 | 27/07/2016 | 71 | LC8 | 5.05 |
| 25/04/2011 | 35 | LT5 | 0.48 | 28/08/2016 | 72 | LC8 | 4..10 |
| 19/05/2011 | 36 | LE7 | 0.22 | 13/09/2016 | 73 | LC8 | 24.7 |
| 24/09/2011 | 37 | LE7 | 4.48 | 02/12/2016 | 74 | LC8 | 13.19 |
| Detection Results | Reference Data | User Accuracy (%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Unchanged | 06 | 07 | 08 | 09 | 10 | 11 | 12 | 13 | 14 | 15 | ||
| changed | 115 | 0 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 95.83 |
| 06 | 1 | 43 | 3 | 2 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 86.00 |
| 07 | 2 | 1 | 44 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 88.00 |
| 08 | 1 | 0 | 1 | 46 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 92.00 |
| 09 | 1 | 0 | 0 | 1 | 47 | 1 | 0 | 0 | 0 | 0 | 0 | 94.00 |
| 10 | 2 | 0 | 1 | 0 | 1 | 45 | 1 | 0 | 0 | 0 | 0 | 90.00 |
| 11 | 1 | 0 | 0 | 0 | 2 | 1 | 45 | 1 | 0 | 0 | 0 | 90.00 |
| 12 | 0 | 0 | 0 | 1 | 0 | 2 | 1 | 44 | 1 | 1 | 0 | 88.00 |
| 13 | 1 | 0 | 0 | 0 | 0 | 1 | 2 | 3 | 42 | 0 | 1 | 84.00 |
| 14 | 1 | 0 | 0 | 0 | 0 | 0 | 2 | 2 | 2 | 42 | 1 | 84.00 |
| 15 | 2 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 2 | 5 | 40 | 80.00 |
| Producer accuracy (%) | 91.27 | 95.56 | 89.80 | 86.79 | 90.57 | 86.54 | 84.91 | 88.00 | 85.71 | 87.50 | 95.24 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, Y.; Chen, Z.; Huang, Q.; Li, F.; Wang, B.; Ma, L. Bidirectional Segmented Detection of Land Use Change Based on Object-Level Multivariate Time Series. Remote Sens. 2020, 12, 478. https://doi.org/10.3390/rs12030478
Hao Y, Chen Z, Huang Q, Li F, Wang B, Ma L. Bidirectional Segmented Detection of Land Use Change Based on Object-Level Multivariate Time Series. Remote Sensing. 2020; 12(3):478. https://doi.org/10.3390/rs12030478
Chicago/Turabian StyleHao, Yuzhu, Zhenjie Chen, Qiuhao Huang, Feixue Li, Beibei Wang, and Lei Ma. 2020. "Bidirectional Segmented Detection of Land Use Change Based on Object-Level Multivariate Time Series" Remote Sensing 12, no. 3: 478. https://doi.org/10.3390/rs12030478
APA StyleHao, Y., Chen, Z., Huang, Q., Li, F., Wang, B., & Ma, L. (2020). Bidirectional Segmented Detection of Land Use Change Based on Object-Level Multivariate Time Series. Remote Sensing, 12(3), 478. https://doi.org/10.3390/rs12030478