High-Resolution Spatial Distribution of Bird Movements Estimated from a Weather Radar Network

 , , , and
, , , and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
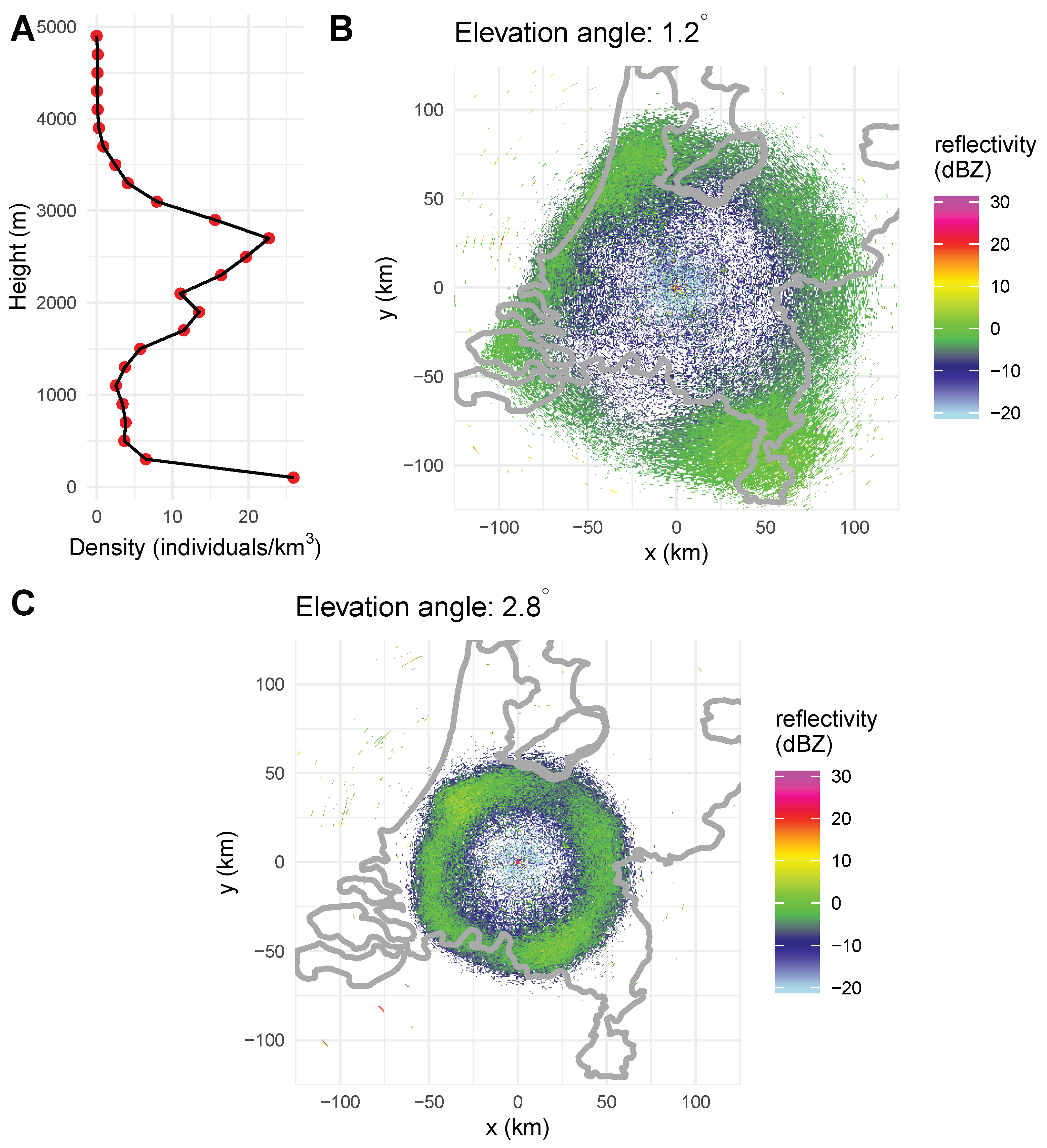
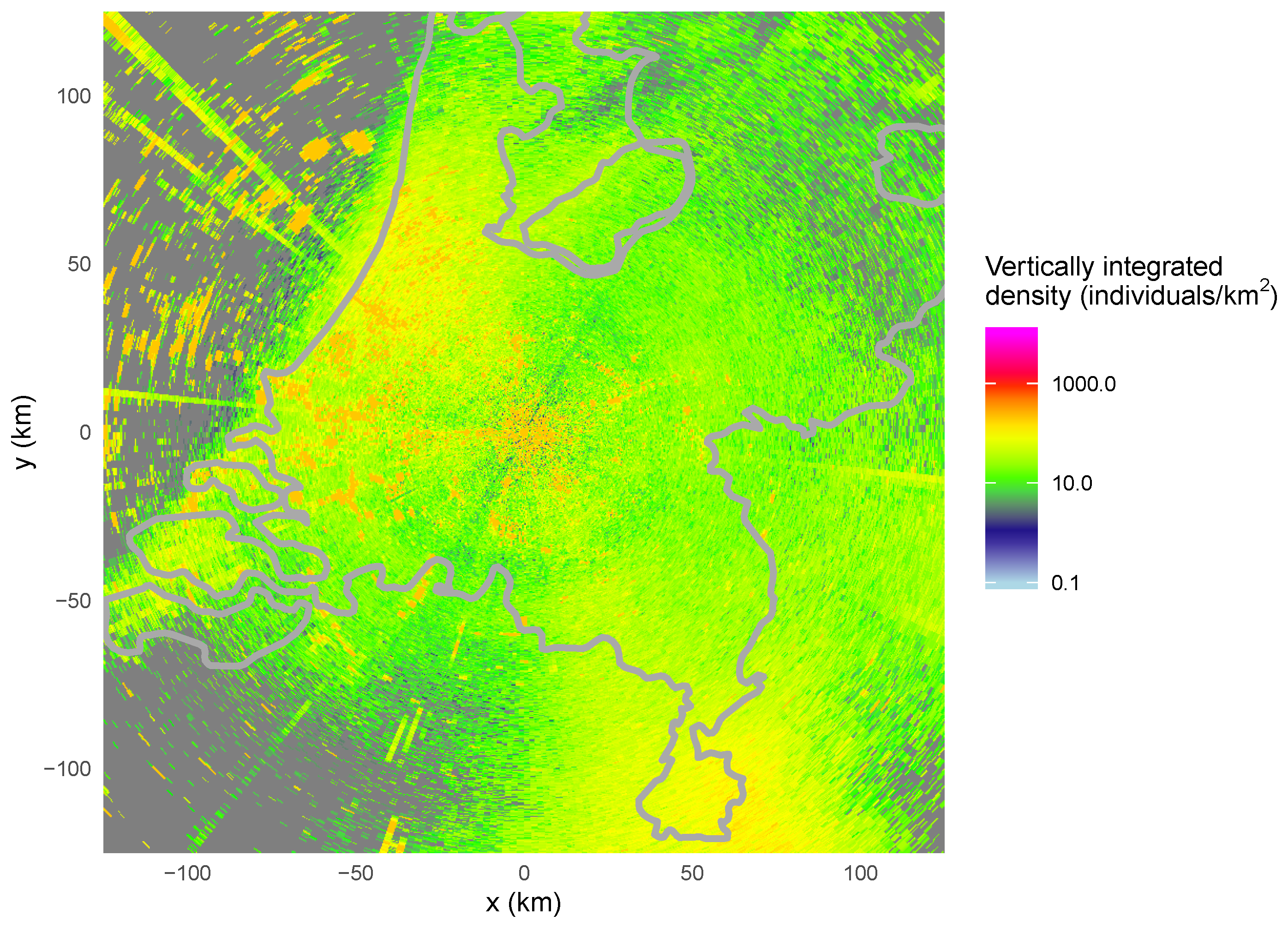
2.1. Spatial estimates of Vertically Integrated Density
- integrate over the vertical dimension by taking into account all radar scans recorded at different elevations
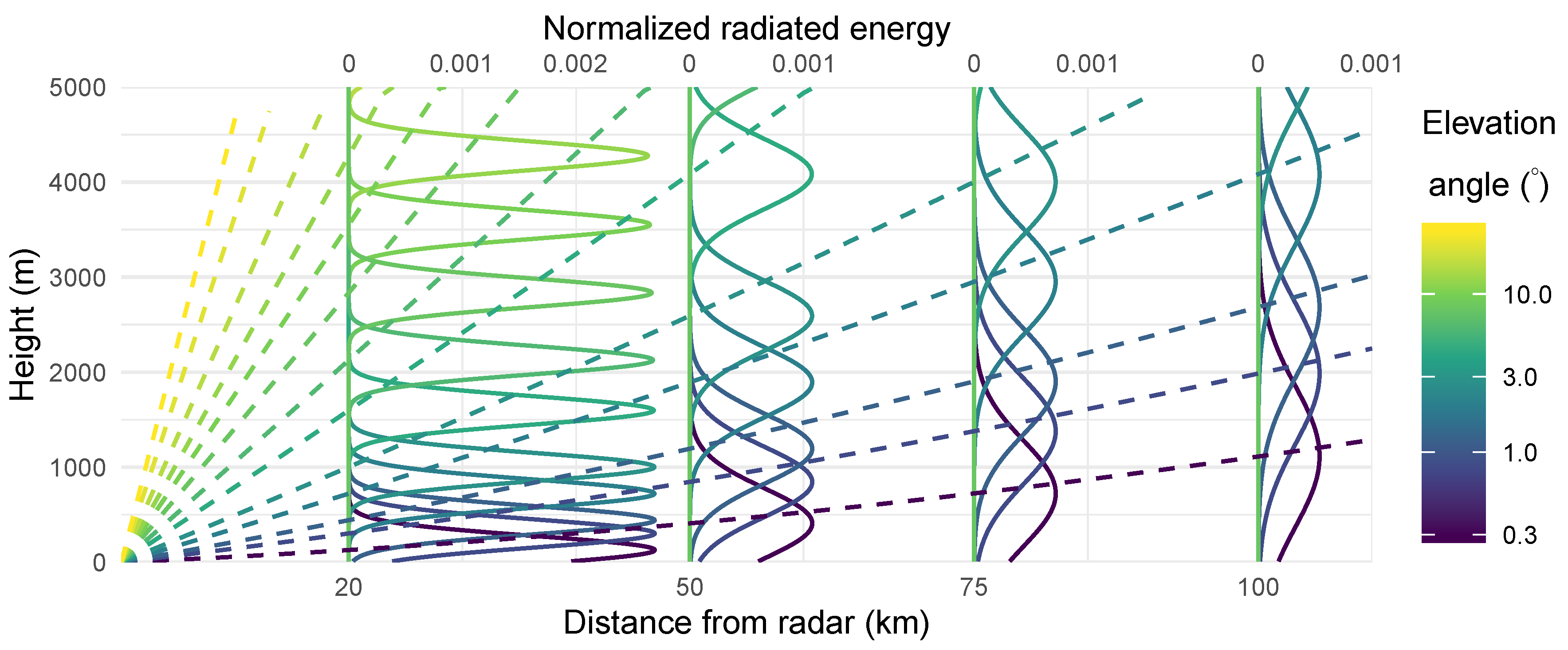
- account for the changing overlap between the radar beams as a function of range
2.2. Data
2.3. Case Studies
3. Results
4. Discussion
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| PPI | Plan position indicator |
| VID | Vertically integrated density |
| vir | vertically integrated reflectivity |
References
- Bauer, S.; Chapman, J.W.; Reynolds, D.R.; Alves, J.A.; Dokter, A.M.; Menz, M.M.H.; Sapir, N.; Ciach, M.; Pettersson, L.B.; Kelly, J.F.; et al. From Agricultural Benefits to Aviation Safety: Realizing the Potential of Continent-Wide Radar Networks. BioScience 2017, 67, 912–918. [Google Scholar] [CrossRef]
- Gasteren, H.v.; Krijgsveld, K.L.; Klauke, N.; Leshem, Y.; Metz, I.C.; Skakuj, M.; Sorbi, S.; Schekler, I.; Shamoun-Baranes, J. Aeroecology meets aviation safety: Early warning systems in Europe and the Middle East prevent collisions between birds and aircraft. Ecography 2019, 42, 899–911. [Google Scholar] [CrossRef]
- Dokter, A.M.; Farnsworth, A.; Fink, D.; Ruiz-Gutierrez, V.; Hochachka, W.M.; Sorte, F.A.L.; Robinson, O.J.; Rosenberg, K.V.; Kelling, S. Seasonal abundance and survival of North America’s migratory avifauna determined by weather radar. Nat. Ecol. Evol. 2018, 2, 1603–1609. [Google Scholar] [CrossRef] [PubMed]
- Doren, B.M.V.; Horton, K.G. A continental system for forecasting bird migration. Science 2018, 361, 1115–1118. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, C.; Dokter, A.M.; Verlinden, L.; Shamoun-Baranes, J.; Schmid, B.; Desmet, P.; Bauer, S.; Chapman, J.; Alves, J.A.; Stepanian, P.M.; et al. Revealing patterns of nocturnal migration using the European weather radar network. Ecography 2019, 42, 876–886. [Google Scholar] [CrossRef] [Green Version]
- McLaren, J.D.; Buler, J.J.; Schreckengost, T.; Smolinsky, J.A.; Boone, M.; Loon, E.E.v.; Dawson, D.K.; Walters, E.L. Artificial light at night confounds broad-scale habitat use by migrating birds. Ecol. Lett. 2018, 21, 356–364. [Google Scholar] [CrossRef]
- Horton, K.G.; Nilsson, C.; Doren, B.M.V.; Sorte, F.A.L.; Dokter, A.M.; Farnsworth, A. Bright lights in the big cities: Migratory birds’ exposure to artificial light. Front. Ecol. Environ. 2019, 17, 209–214. [Google Scholar] [CrossRef]
- Rosenberg, K.V.; Dokter, A.M.; Blancher, P.J.; Sauer, J.R.; Smith, A.C.; Smith, P.A.; Stanton, J.C.; Panjabi, A.; Helft, L.; Parr, M.; et al. Decline of the North American avifauna. Science 2019, 366, 120–124. [Google Scholar] [CrossRef]
- Saltikoff, E.; Friedrich, K.; Soderholm, J.; Lengfeld, K.; Nelson, B.; Becker, A.; Hollmann, R.; Urban, B.; Heistermann, M.; Tassone, C. An Overview of Using Weather Radar for Climatological Studies: Successes, Challenges, and Potential. Bull. Am. Meteorol. Soc. 2019, 100, 1739–1752. [Google Scholar] [CrossRef]
- Saltikoff, E.; Haase, G.; Delobbe, L.; Gaussiat, N.; Martet, M.; Idziorek, D.; Leijnse, H.; Novák, P.; Lukach, M.; Stephan, K. OPERA the Radar Project. Atmosphere 2019, 10, 320. [Google Scholar] [CrossRef] [Green Version]
- Rogers, R.M.; Buler, J.J.; Wainwright, C.E.; Campbell, H.A. Opportunities and challenges in using weather radar for detecting and monitoring flying animals in the Southern Hemisphere. Austral Ecol. 2019, 45, 127–136. [Google Scholar] [CrossRef]
- WMO Radar Database. Available online: https://wrd.mgm.gov.tr/home/Wrd (accessed on 17 December 2019).
- Dokter, A.M.; Liechti, F.; Stark, H.; Delobbe, L.; Tabary, P.; Holleman, I. Bird migration flight altitudes studied by a network of operational weather radars. J. R. Soc. Interface 2011, 8, 30–43. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sheldon, D.; Farnsworth, A.; Irvine, J.; Van Doren, B.; Webb, K.; Dietterich, T.; Kelling, S. Approximate Bayesian Inference for Reconstructing Velocities of Migrating Birds from Weather Radar. In Proceedings of the 27th AAAI Conference on Artificial Intelligence, Bellevue, WA, USA, 14–18 July 2013; pp. 1334–1340. [Google Scholar]
- Sánchez-Diezma, R.; Zawadzki, I.; Sempere-Torres, D. Identification of the bright band through the analysis of volumetric radar data. J. Geophys. Res. Atmos. 2000, 105, 2225–2236. [Google Scholar] [CrossRef]
- Hazenberg, P.; Torfs, P.J.J.F.; Leijnse, H.; Delrieu, G.; Uijlenhoet, R. Identification and uncertainty estimation of vertical reflectivity profiles using a Lagrangian approach to support quantitative precipitation measurements by weather radar. J. Geophys. Res. Atmos. 2013, 118, 10243–10261. [Google Scholar] [CrossRef]
- Buler, J.J.; Diehl, R.H. Quantifying Bird Density During Migratory Stopover Using Weather Surveillance Radar. IEEE Trans. Geosci. Remote. Sens. 2009, 47, 2741–2751. [Google Scholar] [CrossRef]
- Buler, J.J.; Dawson, D.K. Radar analysis of fall bird migration stopover sites in the northeastern U.S.Análisis por radar de los sitios de parada migratoria en otoño en el noreste de Estados UnidosRadar Analysis of Fall Bird Stopover Distributions. Condor 2014, 116, 357–370. [Google Scholar] [CrossRef] [Green Version]
- Bruderer, B.; Peter, D.; Korner-Nievergelt, F. Vertical distribution of bird migration between the Baltic Sea and the Sahara. J. Ornithol. 2018, 159, 315–336. [Google Scholar] [CrossRef]
- Kemp, M.U.; Shamoun-Baranes, J.; Dokter, A.M.; van Loon, E.; Bouten, W. The influence of weather on the flight altitude of nocturnal migrants in mid-latitudes. Ibis 2013, 155, 734–749. [Google Scholar] [CrossRef]
- Dokter, A.M.; Shamoun-Baranes, J.; Kemp, M.U.; Tijm, S.; Holleman, I. High Altitude Bird Migration at Temperate Latitudes: A Synoptic Perspective on Wind Assistance. PLoS ONE 2013, 8, e52300. [Google Scholar] [CrossRef] [Green Version]
- Damousis, I.; Alexiadis, M.; Theocharis, J.; Dokopoulos, P. A fuzzy model for wind speed prediction and power generation in wind parks using spatial correlation. IEEE Trans. Energy Convers. 2004, 19, 352–361. [Google Scholar] [CrossRef]
- Diehl, R.H.; Larkin, R.P.; Black, J.E. Radar Observations of Bird Migration Over The Great Lakes. Auk 2003, 120, 278–290. [Google Scholar] [CrossRef]
- Archibald, K.; Buler, J.; Smolinsky, J.; Smith, R. Migrating birds reorient toward land at dawn over the Great Lakes, USA. Auk 2017, 134, 193–201. [Google Scholar] [CrossRef]
- Hu, C.; Cui, K.; Wang, R.; Long, T.; Ma, S.; Wu, K. A Retrieval Method of Vertical Profiles of Reflectivity for Migratory Animals Using Weather Radar. IEEE Trans. Geosci. Remote. Sens. 2019, 58, 1030–1040. [Google Scholar] [CrossRef]
- Dokter, A.M.; Desmet, P.; Spaaks, J.H.; Hoey, S.v.; Veen, L.; Verlinden, L.; Nilsson, C.; Haase, G.; Leijnse, H.; Farnsworth, A.; et al. bioRad: Biological analysis and visualization of weather radar data. Ecography 2019, 42, 852–860. [Google Scholar] [CrossRef] [Green Version]
- Doviak, R.; Zrnic, D. Doppler radar and weather observations; Academic Press: San Diego, CA, USA, 1993. [Google Scholar]
- Chilson, P.B.; Frick, W.F.; Stepanian, P.M.; Shipley, J.R.; Kunz, T.H.; Kelly, J.F. Estimating animal densities in the aerosphere using weather radar: To Z or not to Z? Ecosphere 2012, 3, art72. [Google Scholar] [CrossRef]
- Probert-Jones, J.R. The radar equation in meteorology. Q. J. R. Meteorol. Soc. 1962, 88, 485–495. [Google Scholar] [CrossRef]
- Dokter, A.M.; Desmet, P.; Hoey, S.V.; Spaaks, J.; Veen, L.; Verlinden, L.; Leijnse, H. bioRad: Biological Analysis and Visualization of Weather Radar Data. Available online: https://github.com/adokter/bioRad (accessed on 11 January 2019).
- Michelson, D.; Lewandowski, R.; Szewczykowski, M.; Beekhuis, H.; Haase, G.; Mammen, T.; Faure, D.; Simpson, M.; Leijnse, H.; Johnson, D. EUMETNET OPERA Weather Radar Information Model for Implementation with the HDF5 File Format, version 2.3; EUMETNET OPERA Document; EUMETNE: Bruxelles, Belgique, 2019. [Google Scholar]
- Image Sequence of Bird Migration Netherlands and Belgium (2016-10-3). Available online: https://doi.org/10.21942/uva.11365169.v2 (accessed on 17 December 2019).
- Grote brand in Uden geblust, van bedrijfspand is niets over. Available online: https://www.omroepbrabant.nl/nieuws/219533/Grote-brand-in-Uden-geblust-van-bedrijfspand-is-niets-over (accessed on 17 December 2019).
- Image sequence of bird migration Netherlands, Germany and Belgium (2017-10-18). Available online: https://doi.org/10.21942/uva.11365295.v2 (accessed on 17 December 2019).
- Stepanian, P.M.; Horton, K.G.; Melnikov, V.M.; Zrnić, D.S.; Gauthreaux, S.A. Dual-polarization radar products for biological applications. Ecosphere 2016, 7, e01539. [Google Scholar] [CrossRef]
- Dokter, A.M.; Liechti, F.; Holleman, I. Bird Detection by Operational Weather Radar; Technical Report WR 2009-06; KNMI: De Bilt, The Netherlands, 2009. [Google Scholar]
- Stepanian, P.M.; Horton, K.G. Extracting Migrant Flight Orientation Profiles Using Polarimetric Radar. IEEE Trans. Geosci. Remote. Sens. 2015, 53, 6518–6528. [Google Scholar] [CrossRef]
- Aurbach, A.; Schmid, B.; Liechti, F.; Chokani, N.; Abhari, R. Complex behaviour in complex terrain—Modelling bird migration in a high resolution wind field across mountainous terrain to simulate observed patterns. J. Theor. Biol. 2018, 454, 126–138. [Google Scholar] [CrossRef]
- Senner, N.R.; Stager, M.; Verhoeven, M.A.; Cheviron, Z.A.; Piersma, T.; Bouten, W. High-altitude shorebird migration in the absence of topographical barriers: Avoiding high air temperatures and searching for profitable winds. Proc. R. Soc. Biol. Sci. 2018, 285, 20180569. [Google Scholar] [CrossRef]
- Bowlin, M.S.; Enstrom, D.A.; Murphy, B.J.; Plaza, E.; Jurich, P.; Cochran, J. Unexplained altitude changes in a migrating thrush: Long-flight altitude data from radio-telemetry. Auk 2015, 132, 808–816. [Google Scholar] [CrossRef] [Green Version]
- Bech, J.; Gjertsen, U.; Haase, G. Modelling weather radar beam propagation and topographical blockage at northern high latitudes. Q. J. R. Meteorol. Soc. 2007, 133, 1191–1204. [Google Scholar] [CrossRef]
- Cabrera-Cruz, S.A.; Smolinsky, J.A.; McCarthy, K.P.; Buler, J.J. Urban areas affect flight altitudes of nocturnally migrating birds. J. Anim. Ecol. 2019, 88, 1873–1887. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, C.; Dokter, A.M.; Schmid, B.; Scacco, M.; Verlinden, L.; Bäckman, J.; Haase, G.; Dell’Omo, G.; Chapman, J.W.; Leijnse, H.; et al. Field validation of radar systems for monitoring bird migration. J. Appl. Ecol. 2018, 55, 2552–2564. [Google Scholar] [CrossRef]
- Nussbaumer, R.; Benoit, L.; Mariethoz, G.; Liechti, F.; Bauer, S.; Schmid, B. A Geostatistical Approach to Estimate High Resolution Nocturnal Bird Migration Densities from a Weather Radar Network. Remote. Sens. 2019, 11, 2233. [Google Scholar] [CrossRef] [Green Version]
- Angell, R.; Sheldon, D. Inferring latent velocities from weather radar data using Gaussian processes. In Proceedings of the 32nd International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 3–8 December 2018; Curran Associates Inc.: Montreal, QC, Canada, 2018. NIPS’18. pp. 8998–9007. [Google Scholar]
- Lin, T.Y.; Winner, K.; Bernstein, G.; Mittal, A.; Dokter, A.M.; Horton, K.G.; Nilsson, C.; Doren, B.M.V.; Farnsworth, A.; Sorte, F.A.L.; et al. MistNet: Measuring historical bird migration in the US using archived weather radar data and convolutional neural networks. Methods Ecol. Evol. 2019, 10, 1908–1922. [Google Scholar] [CrossRef]
- Kilambi, A.; Fabry, F.; Meunier, V.; Kilambi, A.; Fabry, F.; Meunier, V. A Simple and Effective Method for Separating Meteorological from Nonmeteorological Targets Using Dual-Polarization Data. J. Atmos. Ocean. Technol. 2018, 35, 1415–1424. [Google Scholar] [CrossRef]





© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kranstauber, B.; Bouten, W.; Leijnse, H.; Wijers, B.-C.; Verlinden, L.; Shamoun-Baranes, J.; Dokter, A.M. High-Resolution Spatial Distribution of Bird Movements Estimated from a Weather Radar Network. Remote Sens. 2020, 12, 635. https://doi.org/10.3390/rs12040635
Kranstauber B, Bouten W, Leijnse H, Wijers B-C, Verlinden L, Shamoun-Baranes J, Dokter AM. High-Resolution Spatial Distribution of Bird Movements Estimated from a Weather Radar Network. Remote Sensing. 2020; 12(4):635. https://doi.org/10.3390/rs12040635
Chicago/Turabian StyleKranstauber, Bart, Willem Bouten, Hidde Leijnse, Berend-Christiaan Wijers, Liesbeth Verlinden, Judy Shamoun-Baranes, and Adriaan M. Dokter. 2020. "High-Resolution Spatial Distribution of Bird Movements Estimated from a Weather Radar Network" Remote Sensing 12, no. 4: 635. https://doi.org/10.3390/rs12040635
APA StyleKranstauber, B., Bouten, W., Leijnse, H., Wijers, B. -C., Verlinden, L., Shamoun-Baranes, J., & Dokter, A. M. (2020). High-Resolution Spatial Distribution of Bird Movements Estimated from a Weather Radar Network. Remote Sensing, 12(4), 635. https://doi.org/10.3390/rs12040635