1. Introduction
Forest fires and, more generally, wildfires represent one of the major causes of ecosystem disturbance and ecological damage. Besides influencing atmospheric chemistry and air quality in terms of emitted greenhouse gases and the presence of aerosol in the atmosphere [
1], they change land surface properties, causing loss of vegetation and impacts on forestry economy and local agriculture economy. In turn, loss of vegetation exposes soil to erosion and makes burned areas more vulnerable to runoff and then susceptible to flood [
2]. Moreover, the consumption of vegetation that previously anchored the topsoil implies that burned landscapes may become prone to landslides. Accurate knowledge of location and extent of a burned area (BA) is, therefore, fundamental for damage assessment, guiding minimization activities of the aforementioned dangerous effects of vegetation loss, as well as for planning and monitoring vegetation restoration [
3].
Satellite earth observation (EO) is widely used to map a BA. Among the different types of EO instruments, multispectral sensors have demonstrated their suitability for this purpose, even though cloud cover can represent a challenge, especially in geographic areas, such as tropical ones, where the presence of clouds can be persistent. Even fire smoke represents a challenge because it may hamper the observation of burned vegetation. Fire has significant effects on vegetation reflectance, in particular on the reflectance (
) in the near-infrared (NIR) and short wave infrared (SWIR) spectral bands. The difference between the spectral responses of healthy vegetation and burned areas reaches a peak in these bands because a significant reduction of the NIR reflectance (
) and an increase of the SWIR reflectance (
) occur after burning. The former effect is mainly due to the sensitivity of the NIR band to the chlorophyll content of healthy vegetation, while the latter effect is related to the influence of the water content of soil and vegetation on the SWIR reflectance [
4,
5,
6,
7].
Even in the absence of cloud cover, burned areas may be undetected by optical sensors. The spectral response of surface fires that do not impact the canopy is quite similar to that of unburned areas, as shown in [
7], because of the inability of optical radiation to penetrate the dense canopy. More generally, omission errors can be made when dealing with low severity fires because the fire effect on overall surface reflectance can be lower than that needed to detect the change in the landscape produced by the fire itself. It was found that, for the standard NASA BA product [
8], derived from the MODIS sensor, the BA omission error was above 65% (at a global scale) [
9]. Using sensors, such as Landsat or Sentinel-2, with higher spatial resolution (20–30m instead of 500m), but worse temporal resolution (5–16 days instead of 1–2 days), the performances improved and omission errors equal to around 40% [
10,
11], 26.5% [
12], and 22% [
13] were obtained (generally, at smaller spatial scales).
Undetected clouds represent the major source of commission errors; it was found that commission error was above 40% (at a global scale) for the standard NASA BA product [
8] , while it ranged between 48% and 19% for operational BA products derived from higher resolution sensors [
10,
11,
12,
13].
The demand for near-real-time (NRT) information on natural disasters derived from EO data has increased considerably during recent years worldwide (NRT refers to the time needed to deliver the information starting from when EO data are available). As for burned areas, several operational services using EO data are currently available (see [
7] for details). Among them, the rapid mapping component of the Copernicus Emergency Management Service (CEMS) can provide emergency managers with maps of burned areas at different spatial resolutions (from medium-high to very high) using optical sensors like WorldView-3, Pleiades, SPOT6-7, and Sentinel-2 (
https://emergency.copernicus.eu). CEMS is available 24-hours-a-day, 365 days-a-year. However, it is an on-demand service, being triggered on request by authorized users (e.g., National Civil Protection Agencies). Hence, an automatic tool enabling continuous and systematic monitoring of burned areas by routinely producing medium-high resolution maps can complement the rapid mapping component of CEMS for what concerns fire management. In particular, it can improve the timeliness of the maps because the process does not require any user activation. Moreover, it can contribute to the effectiveness of CEMS activation through a better identification of the area of interest, when images with a very high spatial resolution (e.g., WorldView-3) are required for an accurate delineation of the BA extent. Such an automatic tool can, therefore, be useful for local authorities or government agencies at a national scale to take better advantage of the progress achieved in EO technology for managing fire emergencies. The continuous and systematic processing of EO data may also allow users to build a more complete dataset of burned areas in order to derive statistics about the impact of forest fires during the fire season.
The present availability of Sentinel-2 (S2) multispectral data every 5-days on the same target area represents a unique opportunity to design the aforementioned tool, thus to systematically produce maps of burned areas at medium-high spatial resolution (20 m, which is the resolution of the SWIR bands). Several investigations demonstrated the suitability of S2 to detect BA [
3,
10,
12,
14,
15,
16]. It was also found that the high revisit frequency (5 days) of S2 data could mitigate the problem of BA detection in geographic areas with frequent cloud cover [
17]. A systematic NRT burned forest areas mapping service was recently requested by the Italian Department of Civil Protection (DCP) in the framework of its competences assigned by law.
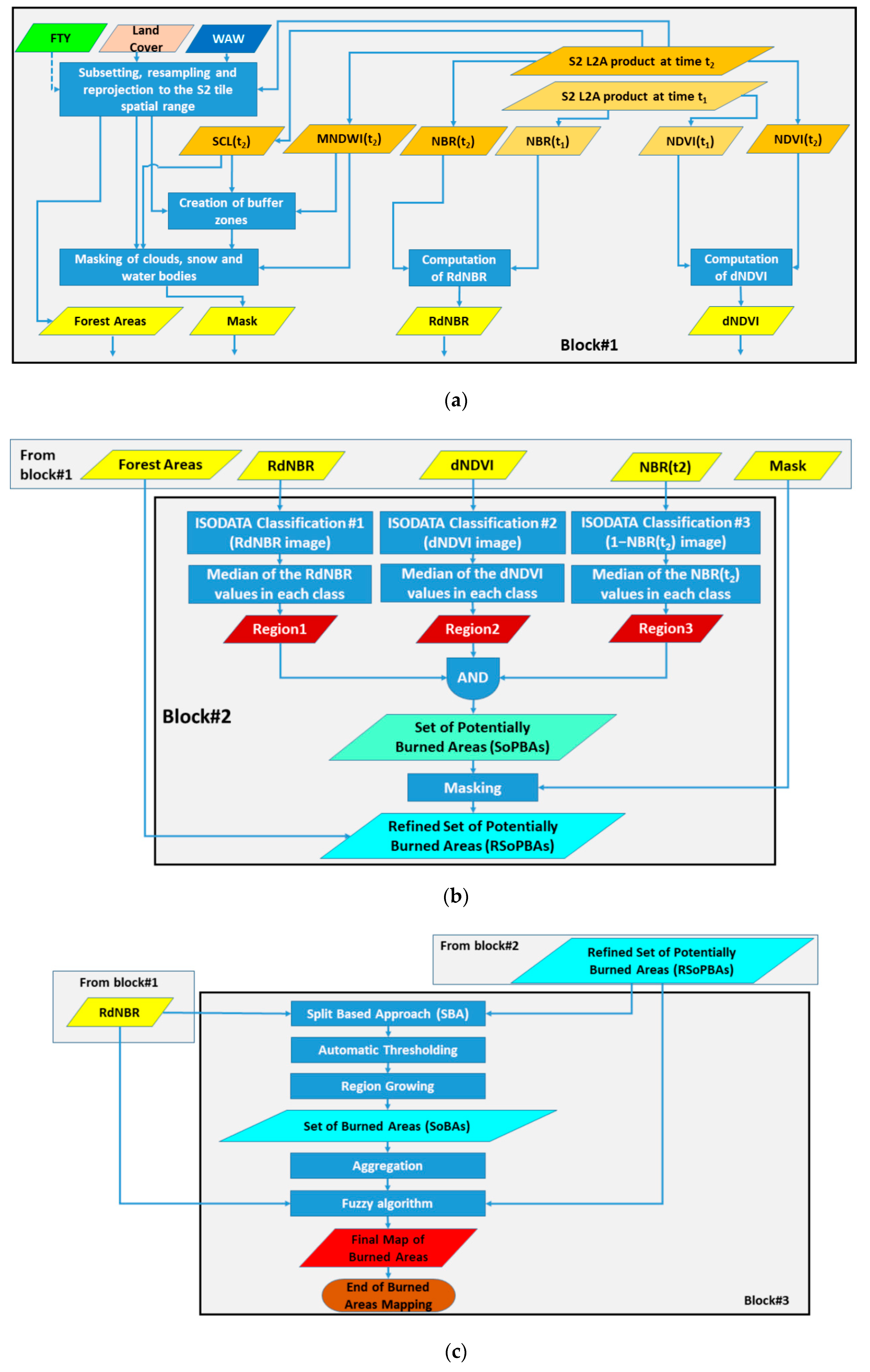
This paper presented an automatic processor, which does not need any supervision, or user intervention, that accomplishes a systematic daily mapping of burned forest areas using S2 data. The acronym AUTOBAM (AUTOmatic Burned Areas Mapper) is used to denote this tool. AUTOBAM was set up in response to the aforementioned request of the Italian DCP, in the framework of the convention between DCP and CIMA Research Foundation, which is one of the DCP competence centers. Therefore, it was conceived to work at national (Italian) scale. Anyway, AUTOBAM can work on any selected pair of pre-fire and post-fire S2 images. AUTOBAM includes also a Sentinel-2 data procurement block, as well as a block for the transfer of the maps to the Italian DCP. Hence, this paper deals also with other challenges related to an operational service, like the NRT access to the S2 data and the delivery of the map to the end-user. Together with the design of a new fully automatic BA detection algorithm, these aspects represent a novel contribution to the literature.
The present release of AUTOBAM focuses on forests because they represent a target that, compared to other land cover types, has a phenological cycle that is quite slow. Hence, a short-term decrease of NIR reflectance combined with a short-term increase of the SWIR reflectance can be reliably ascribed to a fire. Conversely, in other land cover types, such as agricultural areas, short term variations of the reflectance can be due to different causes from fires (e.g., short-term phenology, harvesting activities). Considering that AUTOBAM is a totally unsupervised tool that runs daily at a national scale, it is not possible to provide it with spatially accurate information about short-term phenology and agricultural activities. Hence, including targets, such as agricultural areas, would imply the risk of committing a quite large number of false alarms.
Different approaches are available in the literature to detect burned forest areas using multispectral data. They include visual interpretation [
18], physically-based approaches [
8,
19], supervised classification methods [
20], linear and non-linear regression [
21,
22], principal component analysis [
23], support vector regression [
24], fuzzy logic [
25], spectral mixture analysis [
26], and analysis of time series of data [
10,
27]. Among the others, threshold-based classification represents a methodological reference for mapping BA [
3] and, more generally, for the identification of changes due to natural disasters using EO data [
28]. The main advantage of a thresholding approach is the computational efficiency that makes it suitable for rapid mapping purposes; it is, therefore, used in AUTOBAM. Several threshold values have been proposed in the literature to discriminate BA (and also distinguish among different degrees of burn severity), generally based on empirical data [
5,
29,
30]. However, a threshold value generally depends on many factors, such as environmental and satellite system parameters, so that it can be highly variable. Therefore, thresholds derived in an empirical way may lack generality, and their applicability to data acquired under different environmental conditions can be questioned. AUTOBAM implements an algorithm to map burned areas that includes automatic thresholding and a method to account for the spatial context and variability. The use of automatic thresholding may be problematic if changed regions cover only a small portion of the satellite scene (see
Section 3.2.3). AUTOBAM copes with this problem in a new way by applying a method originally introduced in [
28] and successively modified in [
31]. The BA mapping algorithm implemented in AUTOBAM is validated considering maps produced by the CEMS in 2018 and 2019 as a benchmark.
The paper has been organized as follows.
Section 2 gives an overview of S2 data and introduces the data used by the AUTOBAM tool, as well as the data used to validate the BA mapping algorithm. The latter is presented in
Section 3 that describes also the data procurement block and the delivery of the burned forest areas map to the final user.
Section 4 presents the results of the validation that are discussed in
Section 5, while
Section 6 draws the main conclusions.
2. Materials
2.1. Sentinel-2 Data
The Sentinel-2 multispectral instrument performs measurements in 13 spectral bands with spatial resolutions ranging from 10 to 60 m. The spectral channels include four bands at 10 m spatial resolution, six bands at 20 m spatial resolution, and three bands at 60 m spatial resolution. S2 products are available as elementary granules, also called tiles, of fixed size (100 × 100 km
2), along with a single orbit. A granule contains all possible spectral bands, and it is the minimum indivisible partition of a product.
Figure 1 shows the S2 tiles that cover the Italian territory and are processed by AUTOBAM; their number is 70 subdivided along six orbits. It takes five days to totally cover Italy with the data provided by the S2A and S2B satellites.
AUTOBAM uses level 2A (L2A) surface reflectance products in order to work with data corrected from the atmospheric effects and to take advantage of the availability of a scene classification (SCL) map, which is useful to mask clouds, snow, and water bodies. Among the data included in L2A products, only BOA
images at 10 and 20 m resolution and the SCL map at 20 m resolution are used by the processor. The SCL map distinguishes among 11 classes listed in
Table 1.
L2A products are available within 12-18 hours through the Copernicus Open Access Hub (also known as Sentinel Data Hub System––DHuS), as well as, for the observations of the Italian territory, through the Hellenic National Sentinel Data Mirror Site––HNSDMS (even the Italian Collaborative Ground Segment will be considered, when it will be fully operative). Hence, these products are suitable for a NRT service just like that presented in this paper.
2.2. Spectral Indices Used by the Algorithm to Map Burned Areas
AUTOBAM basically performs the classification of a difference image for mapping BA. The difference image can be derived by comparing the pre-fire and post-fire values of a spectral index combining the NIR and SWIR bands, such as the normalized burned ratio (
NBR), defined as
[
32]. Actually, instead of simply computing
, relativized variables were proposed [
5,
30] in order to reduce the correlation of
dNBR with
, which implies that pixels with low
have low
dNBR regardless of the degree of burn severity [
30]. AUTOBAM uses the relativized
dNBR, defined as [
5]:
where
indicates the absolute value, and the pre-fire
NBR is divided by 1000 because, by convention,
NBR is multiplied by 1000 to transform the data in integer format [
5,
33].
Besides the
RdNBR index, AUTOBAM derives also the normalized difference vegetation index (
NDVI), defined as
[
34], and the modified normalized water index (
MNDWI) defined as
[
35]. The former is used to complement
NBR for BA mapping (details in
Section 3.2.2); although spectral indices based on NIR and RED bands proved to be less effective for BA discrimination than those combining NIR and SWIR bands [
7],
NDVI was widely used for this purpose. Accounting for vegetation vigor,
NDVI is, in principle, able to detect the deteriorations of pigments and leaf structure caused by fires [
36]. Hence, even the difference between pre- and post-fire values of
NDVI (
dNDVI) can, to some extent, help in detecting burned areas.
MNDWI is used for masking water bodies together with the SCL map and an ancillary map described in the following paragraph.
2.3. Study Area
AUTOBAM has been conceived to work daily at national scale for the Italian territory, which covers the latitudes from 36.6°N to 47.1°N and the longitudes from 6.6°E to 18.6°E (see
Figure 2). Italian forest ecosystems are significantly affected by fires; in Mediterranean countries like Italy, an average of 45,000 forest fires, causing the destruction of about 2.6 million hectares, was recorded yearly [
36].
According to the CORINE land cover (CLC) inventory, 34% of the entire Italian territory is covered forest and semi-natural areas. More precisely, based on the CLC level 4 nomenclature, it was found that the class of forest with the higher percentage (7%) with respect to the entire Italian territory corresponds to the broad-leaved forests with continuous canopy on mire, followed by broad-leaved forests with discontinuous canopy, not on mire, broad-leaved forests with discontinuous canopy on mire, and plantation of broad-leaved forests all at 3%, respectively.
2.4. Ancillary Data and Their Processing
To identify forests over the Italian territory, a land cover map was generated by rasterizing the CLC level 3 vector file at a spatial resolution of 20 m on the WGS84 reference ellipsoid (projection LATLON-WGS84). The level 3 CLC inventory discriminates 44 classes, including broad-leaved forest, coniferous forest, and mixed forest. The most recent version (2018) of the CLC data, released in the frame of the Copernicus program and available through the catalog of the Copernicus Land Monitoring Service (Pan-European component), was chosen. The raster (shown in
Figure 2) basically represents the master product used to generate the outputs of the processor, i.e., the maps of BA, and consists of 66,000 × 58,500 pixels.
To improve the reliability of the identification of forest areas, AUTOBAM allows an operator to optionally combine the information derived from CLC with that provided by the forest type (FTY) product, again available from the Copernicus Land Monitoring Service (Pan-European component––high-resolution layers). If the use of FTY is enabled, a S2 image pixel is labeled as a forest if both CLC and FTY classify it as a forest. For masking purposes, even the combined water and wetness (WAW) product available through the Copernicus Land Monitoring Service (Pan-European component––high-resolution layers) is used by AUTOBAM. WAW is a thematic map that identifies permanent water, temporary water, permanent wetness, and temporary wetness. The 20 m resolution products were chosen for WAW and FTY.
As previously pointed out, although the processing chain described in this paper was conceived to operationally work at national scale for the Italian territory, the BA mapping algorithm can be used with any pair of pre-fire and post-fire S2 image tiles. If the geographic area observed by S2 is included in the European Continent, the ancillary data introduced above, available from the Copernicus Land Monitoring Service, could still be used. Otherwise, forests and water bodies could be identified by means of the global land cover map available from the Climate Change Initiative (CCI-LC, 300 m resolution). It is understood that there is not a univocal correspondence between the CLC legend and the CCI-LC legend, and this could be a source of errors in the identification of forest pixels.
2.5. Validation Data
In order to validate the results generated by the processor and, in particular, by the algorithm developed to detect burned forest areas, thematic maps produced by the CEMS are used as a benchmark. Within the CEMS portfolio, delineation maps, which provide an assessment of the event’s extent, have been chosen when available. Note that according to the Italian DCP needs, the objective of the proposed service is to detect BA and map its extent. Burn severity is not considered so that the information provided by CEMS grading maps (estimation of the damage grade) is not used.
Usually, CEMS delineation products are derived by means of visual interpretation performed by a very skilled operator, so that errors are minimized relative to other remote sensing products. CEMS products have been used as reference data in previous studies, concerning not only fires [
10,
14,
15] but also floods [
37]. To provide reliable validation results, only delineation products generated by CEMS using S2 images (both pre- and post-fire) are considered, thus avoiding that differences between reference maps and AUTOBAM-derived maps are caused by the use of different kinds of EO data. This constraint led us to select only one fire event that occurred in Italy. To increase the reliability of the validation and to test the actual possibility, mentioned in the Introduction, to apply the algorithm to any pair of S2 images (provided that they refer to the same tile), we have searched for all the CEMS maps produced using S2 data regardless of their geographic location. The corresponding test sites are:
Evia Island, Greece (CEMS activation code: EMSR 306). The fire occurred in August 2018 and affected the Kontodespoti and Stavros villages. The vector package, belonging to the Kontodespoti Delineation Map, version 2 data, was downloaded. According to these data, the size of the burned area was about 4 km2. The S2 images (tile T34SGH) were acquired on 14 August 2018 (post-fire) and 31 May 2018 (pre-fire).
Tuscany, Italy (CEMS Activation Code: EMSR316). This fire, which occurred in September 2018, hit the area of Monte Serra and the Calci village (central Italy). The vector package, belonging to the Calci Delineation Map, Monitoring 1 version 1 data, was downloaded. According to these data, the size of the burned area was about 10 km2. The S2 images (tile T32TPP) were acquired on 26 September 2018 (post-fire) and 21 September 2018 (pre-fire).
Sithonia, Greece (CEMS Activation Code: EMSR331). This fire, which occurred in October 2018, affected an area located 100 km southeast from Thessaloniki in a pine forest. The vector package, belonging to the Sithonia Delineation Map, version 1 data, was downloaded. According to these data, the size of the burned area was about 8 km2. The S2 images (tile T35TKE) were acquired on 26 October 2018 (post-fire) and 18 October 2018 (pre-fire).
Mount Kenia, Kenya (CEMS Activation Code: EMSR345). This fire occurred in March 2019 and started in the Tharaka Nithi side of Mount Kenya. The vector package, belonging to the Mount Kenya Delineation Map, version 1 data, was downloaded. According to these data, the size of the burned area was about 140 km2. The S2 images (tile T37MCV) were acquired on 28 February 2019 (post-fire) and 18 February 2019 (pre-fire).
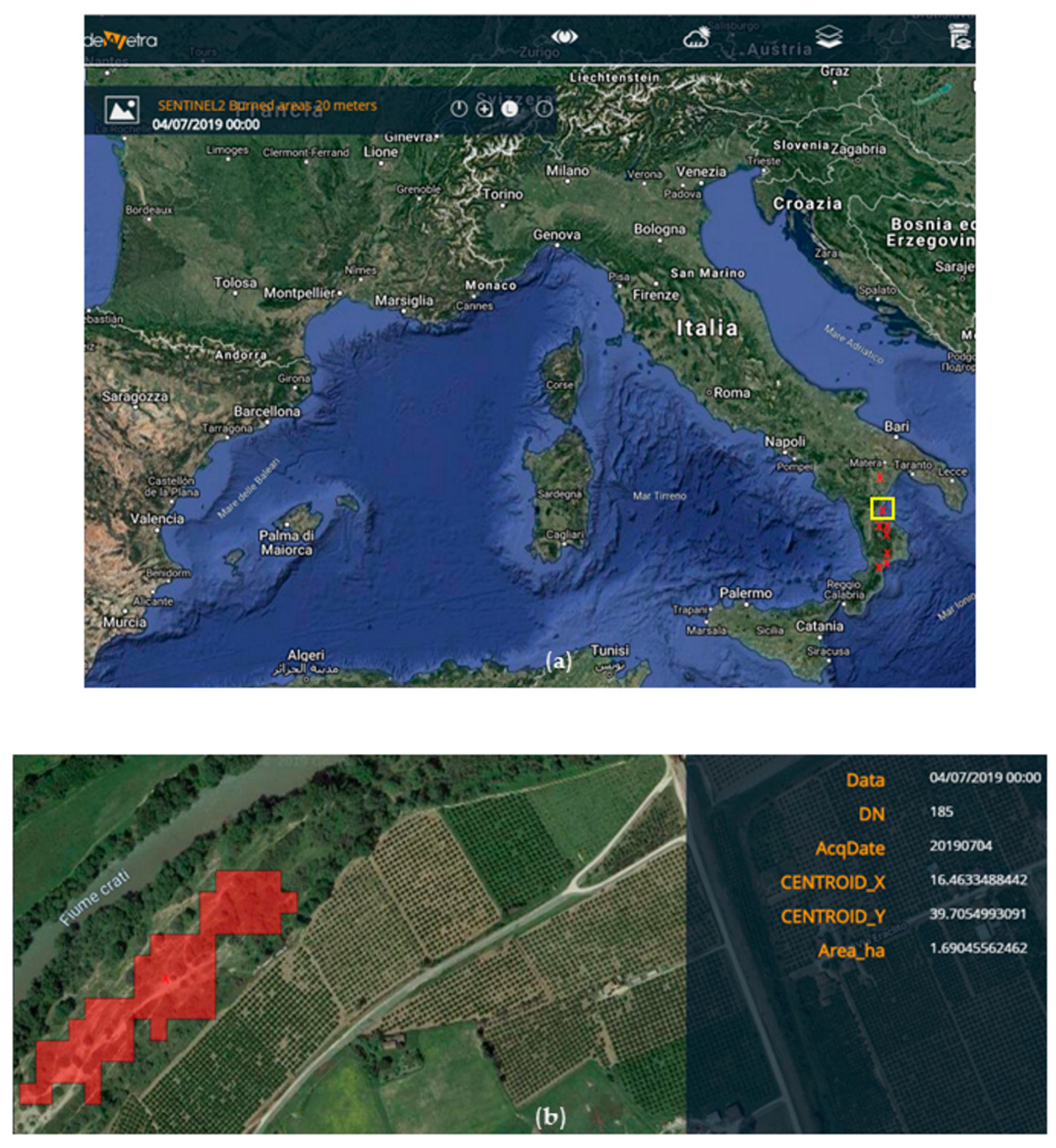
Castile and León, Spain (CEMS Activation Code: EMSR368). This fire, which occurred in June 2019, affected the municipality of Gavilanes, Ávila, destroying an area with high ecological value. The vector package, belonging to the El Arenal Grading Product, version 3, release 1 data, was downloaded. According to these data, the size of the burned area was about 15 km2. The S2 images (tile T30TUK) were acquired on 01 July 2019 (post-fire) and 12 May 2019 (pre-fire).
It can be noted that, in some cases, the pre- and post-fire images were acquired with a time interval of multiple weeks. This could have an impact on the validation results, as discussed in
Section 5.
Among the files available from the CEMS vector packages introduced above, which are in shapefile (.shp) format, the area_of_interest_a.shp and the observed_event_a.shp were used for the validation. In particular, observed_event_a.shp vector files were rasterized and then used as ground truth images to generate, for each case study, a confusion matrix in order to assess the performance of the BA mapping algorithm. The boundaries of the geographic area considered to derive the confusion matrix were determined through the area_of_interest_a.shp vector files.
5. Discussion
This paper presents a processing chain for near real-time mapping of burned forest areas using S2 data. The service implemented by the processing chain is tested in pre-operational mode since 15 June 2019 and is used by the Italian DCP to monitor the location and the extent of the burned areas.
Some studies about the use of S2 data to map BA have been already published [
3,
10,
12,
14,
15,
16]. What distinguishes this study from previous ones is that it develops a fully automatic processor that includes data procurement and delivery of BA maps. Moreover, while in many papers (e.g., [
10,
12]), fixed thresholds are used to discriminate BA or at least to initialize the BA detection algorithm, here the thresholds are automatically determined in an adaptive way based on the local properties of the considered
RdNBR map. Similarly to other studies, different spectral indices are used in combination in order to ensure that the changes detected by AUTOBAM are actually due to a loss of vegetation. Even the combination of different techniques to improve the reliability of the mapping algorithm has been already applied in previous studies, mainly for the purpose of balancing commission and omission errors [
10,
12,
47].
The only ancillary data used by AUTOBAM are maps of land cover and water bodies. Taking advantage of other ancillary data, like the MODIS-derived active fire product [
48], as done, for instance, in [
12], might allow a BA mapping algorithm to reduce commission errors. In this case, only areas where hotspots are detected, which have a very high likelihood of being burned, are analyzed. However, the very different spatial resolutions of MODIS and S2 could represent a challenge that might lead to an increase of the omission error, especially when dealing with fires having a small extent. This is the reason why the present release of AUTOBAM does not make use of the information coming from active fire products.
The following sub-sections initially explain the discrepancies between AUTOBAM-derived and CEMS-derived maps. Then, the applicability of the algorithm to areas different from the Mediterranean one is discussed. Finally, the impact of the combination of different image processing techniques to map BA is analyzed.
5.1. Omission and Commission Errors
As expected, one of the major sources of error is represented by the presence of clouds. On the one hand, BA can be obscured by clouds [
49]. On the other hand, undetected clouds can be confused with BA [
12]. Although the commission error is in the order of 1%–3% (except for one test case), it is expected that, throughout the performance of the daily BA mapping service, missed detection of clouds and cloud shadows might occur in the SCL included in the L2A product, thus giving rise to larger commission error. Updated S2 L2A products will likely improve the capability to detect clouds (as well as to deal with artifacts as topographic shadows).
The problem of the presence of clouds is very critical for an automatic service like AUTOBAM, which processes all the available S2 images of Italy, with the only constraint that cloud cover must be less than 40%. On-demand services like CEMS have the possibility to choose in a large portfolio of satellite data the most suitable ones; nonetheless, even CEMS may have the necessity to select images where cloud cover is present. The Evia Island event (
Figure 9a,b), which turned several hectares of pine trees into ashes, represents a case study where CEMS selected a post-fire image partially covered by clouds. Although it is not visible in
Figure 9b, it has been found that the creation of a buffer zone to enlarge the cloud mask derived from SCL implies that some pixels classified as burned by CEMS are masked. Hence, enlarging the cloud mask might lead to an increase of the omission error, as highlighted also in [
49], where an algorithm to identify BA in dense time-series of Landsat data was presented. On the other hand, the experience gained in daily producing maps of BA at a national scale led us to conclude that without performing this enlargement, false alarms often take place in pixels located at the boundaries of the areas labeled as clouds by SCL.
The Evia Island fire is the only test case for which the commission error is quite large, exceeding 25%, even if both OA and κ were high. Although commission error when mapping BA is mainly caused by an inaccurate masking of clouds, cloud shadows, and terrain shadows [
12], in this case, it is mainly related to the long interval between the acquisition times of the pre- and post-fire images (note that the same images as those selected by CEMS have been chosen for validation purposes), which exceeded two months (see
Section 2.5).
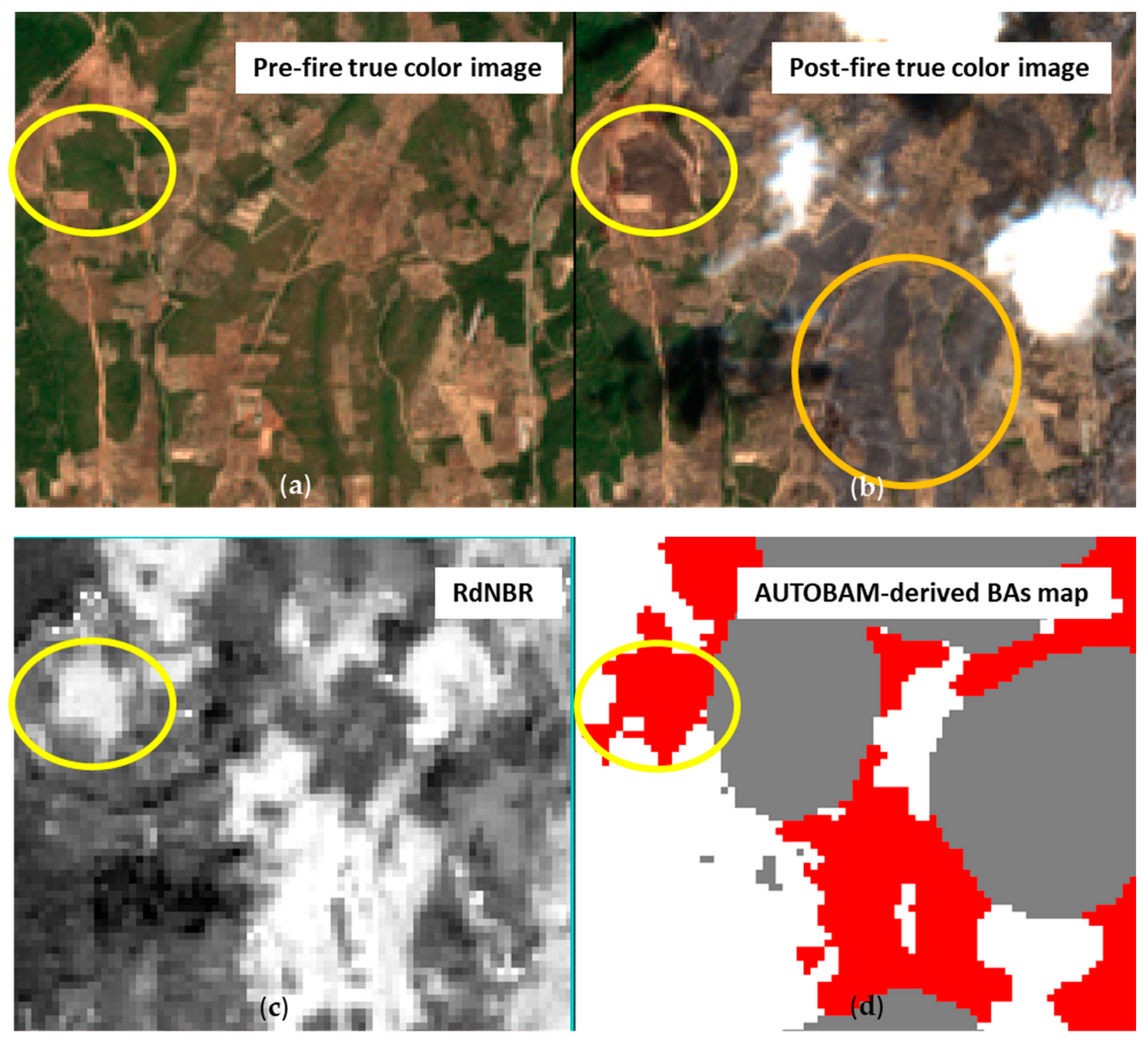
Figure 10 shows an area (highlighted by yellow circles), where a quite significant false alarm occurred. By comparing panels (
a) and (
b), it can be noted that this area was vegetated (green in the true color image) when the pre-fire image was acquired, while it was bare (brown tone in the true color image) at the post-fire acquisition time. This change was evaluated by the CEMS operators as not caused by the fire, likely because the tone of this area is slightly different from that of the core of the BA (orange circle in panel (
b)) that tends to be gray in the post-fire image. Hence, a change in the vegetation conditions likely occurred during the time between the two S2 acquisitions. This outcome explains why we limited to 30 days the maximum difference between pre- and post-fire acquisition times (see
Section 3.2.1).
For the Sithonia fire, which caused the damage of about 800 ha of a pine forest, the omission error is around 25%. Looking at
Figure 9f, it can be noted that, in this case, the CEMS-derived BA map has no gaps, as if the spectral index used by CEMS to generate the map were totally uniform in the burned area. Looking at
Figure 11, (analogous to
Figure 10, but for the Sithonia test case), it can be noted that
RdNBR is not uniformly high in this area and that the spatial pattern of the AUTOBAM-derived map basically reproduces that of
RdNBR. Note that the regions highlighted by the blue circles in
Figure 11 (labeled as unburned by AUTOBAM) have a dark green tone in the post-fire image and that
RdNBR in these regions assumed even negative values (typical of unburned areas). This justifies the fact that AUTOBAM has not classified these areas as burned. Probably, in these areas, the intensity of the fire caused only low severity damages, so that, as discussed in [
50], its effects have not triggered the detection threshold. Furthermore, the fact that the grading map (i.e., that including the degree of severity) provided by CEMS labels these areas as “possibly damaged” confirms the uncertainty of the classification task in this case.
5.2. Applicability of the Algorithm to Different Geographic Areas
In the Introduction, it has been underlined that although the proposed service will be operative in Italy, the algorithm to map BA can work in principle with any pair of pre-fire and post-fire images, provided that they refer to the same tile. Even if only one validation site is in Italy, the majority of the case studies regards forest fires that took place in the Mediterranean area. Hence, from the point of view of the applicability of the algorithm to different geographic areas, the results obtained for Mount Kenia (
Figure 9g,h) are the most significant since, in this case, S2 observations of an environment totally different from the Mediterranean one have been processed. The Mount Kenia fire charred thousands of hectares of moorland and bamboo forest. It is worth pointing out that, since CLC is not available outside Europe, the CCI-LC has been used for Mount Kenia. As pointed out in
Section 2.4, uncertainties in the transformation from the CCI legend to the CLC legend (the CLC codes were used by AUTOBAM to identify forests) could represent a source of error. Nevertheless, both OA and κ assume high values (99.3% and 0.94, respectively).
Although the Mount Kenia event affected an ecosystem different from the Mediterranean one, the use of a spectral index combining the NIR and SWIR bands enabled to design a quite robust BA detection algorithm. The decrease of NIR reflectance after burning was used since 1980 [
51] to map forest not only in temperate regions but also in boreal and tropical environments. Moreover, the increase of the SWIR reflectance after burning, firstly observed in the Mediterranean region [
18], was also confirmed in different ecosystems like savanna [
7,
52]. The robustness of AUTOBAM to changes in the ecosystem is also due to the fact that it takes advantage of image processing techniques like ISODATA and automatic thresholding that adapt themselves to the specific images that have to be processed. It is worth underlining again that, in any case, the algorithm to map BA was designed to deal with forests. Hence, for a reliable application of the present release of AUTOBAM, this kind of land cover must be included in the area affected by the fire.
5.3. Impact of the Combination of Different Image Processing Techniques
Although the algorithm implemented in AUTOBAM basically used thresholding (applied within an approach based on RGA) to map BA, this technique was combined with ISODATA and with the fuzzy logic-based approach.
Concerning the role of the application of the ISODATA in AUTOBAM, it is interesting to compare the BA maps produced with and without applying it.
Figure 12 presents this comparison for the Castile and León case study that caused the destruction of 1500 ha of forest and shrubland. The orange box in the upper right corner of panels (
a) and (
b) corresponds to the area of interest delineated by the
area_of_interest.shp CEMS file (that is shown in panel
c), so that the upper panels of
Figure 12 include also regions located outside this area, which, therefore, were not classified as burned by CEMS. It can be clearly seen that without performing the ISODATA (panel
b), there are some pixels that are incorrectly labeled as burned. Hence, in this case, the combination of different image processing techniques contributes to ensuring the robustness to false alarms of the BA mapping algorithm (panel
a).
As discussed in
Section 3.2.3, the fuzzy logic-based approach performs just a refinement of the BA map aiming at including, in the SoBAs, pixels close to this set that have a high value of
RdNBR and/or belong to the RSoPBAs. The use of the fuzzy logic for post-classification purposes was carried out also in [
44].
Figure 13 shows the AUTOBAM-derived map of BA for the Tuscany fire, which destroyed 1000 ha of territory, including prevalently forest and olive groves. The pixels colored in blue represented those added to the SoBAs by the fuzzy logic-based algorithm. It can be seen that although only a few pixels were included in the set SoBAs (the biggest sets of pixels are highlighted by blue circles in
Figure 13), this inclusion increased the accuracy of the map of BA since the blue pixels were mostly classified as burned by CEMS too. Nonetheless, some areas classified as burned by CEMS and unburned by AUTOBAM remain. In most of these areas, the situation is similar to that discussed when dealing with the Sithonia case study, i.e., the values of
RdNBR are not large enough to be above the detection threshold.
6. Conclusions
A tool designed for a fully automated service of burned forest areas mapping using Sentinel-2 has been presented. Although several studies available in the literature dealt with the problem of burned forest areas mapping using multispectral data, the creation of a processing chain that automates the various steps needed to set up an operational service was rarely tackled. These steps include not only the processing of the images but also the data procurement and the delivery of the maps to the end-user.
For the areas of the Italian territory observed by Sentinel-2, the service daily generates maps of burned forest areas at a national scale with a spatial resolution of 20 m. For a given location, the maps are updated every 5 days (the Sentinel-2 revisit time) in the absence of cloud cover. The algorithm to detect burned forest areas takes advantage of different image processing techniques in order to reduce the risk of committing omission or commission errors. As expected, cloud cover is the major source of errors, both commission, if clouds are not correctly detected so that they can be misclassified as burned areas, and omission, because they can hamper the observation of burned areas. Note that the mechanism designed in order to guarantee that the pre-fire image actually contains the most recent Sentinel-2 measurement performed under cloud-free conditions ensures that, if an omission error due to cloud cover in the post-fire image takes place, it will be corrected by the image acquired five days later (if it is not cloudy too). Another source of error could be a long interval between the pre- and post-fire images acquisition times, during which changes in vegetation conditions might occur and be confused with burning, but that this problem is not expected to be very critical for the proposed service, thanks to the short revisit of Sentinel-2. The comparison with maps produced by the Copernicus Emergency Management Service has shown that the mapping algorithm implemented in the processor performs quite well. The high values of the overall accuracy and the kappa coefficient have confirmed, from a quantitative point of view, the good behavior of the algorithm, even considering different geographic areas. We did not quantify the errors due to the presence of cloud cover because the cloud cover detection is carried out at the Sentinel-2 ground segment when producing level 2A products, so that it has nothing to do with the algorithm.
The service is tested in fully pre-operational mode since the summer of 2019. The maps produced by the proposed service could be daily visualized by the end-user (the Italian Department of Civil Protection) through a web portal in order to provide emergency managers with near real-time information about the extent of the burned areas. Future work will concern the possible application of AUTOBAM to identify burned shrubbery areas too, which are prone to be affected by fire in the Mediterranean region.
Although the proposed service has been conceived to work at a national (Italian) scale, it is possible to use the mapping algorithm with any pair of Sentinel-2 pre- and post-fire images, provided that they refer to the same tile. Hence, we have planned to export the burned areas mapping algorithm in a platform named Web Advanced Space Developer Interface (WASDI, available at
http://www.wasdi.net) where authorized users will be able to rapidly process selected pairs of Sentinel-2 images. The added value of WASDI with respect to currently existing catalogs is its capability to elaborate Earth Observation data (like Sentinel-2 ones) directly on a cloud server connected to one of the Copernicus Data and Information Access Services (DIAS), namely the ONDA DIAS. The exportation of the algorithm in WASDI would, therefore, move the processor towards the data rather than the data to the users, with a significant time-saving.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}