UAV and Structure from Motion Approach to Monitor the Maierato Landslide Evolution




Abstract
:
1. Introduction
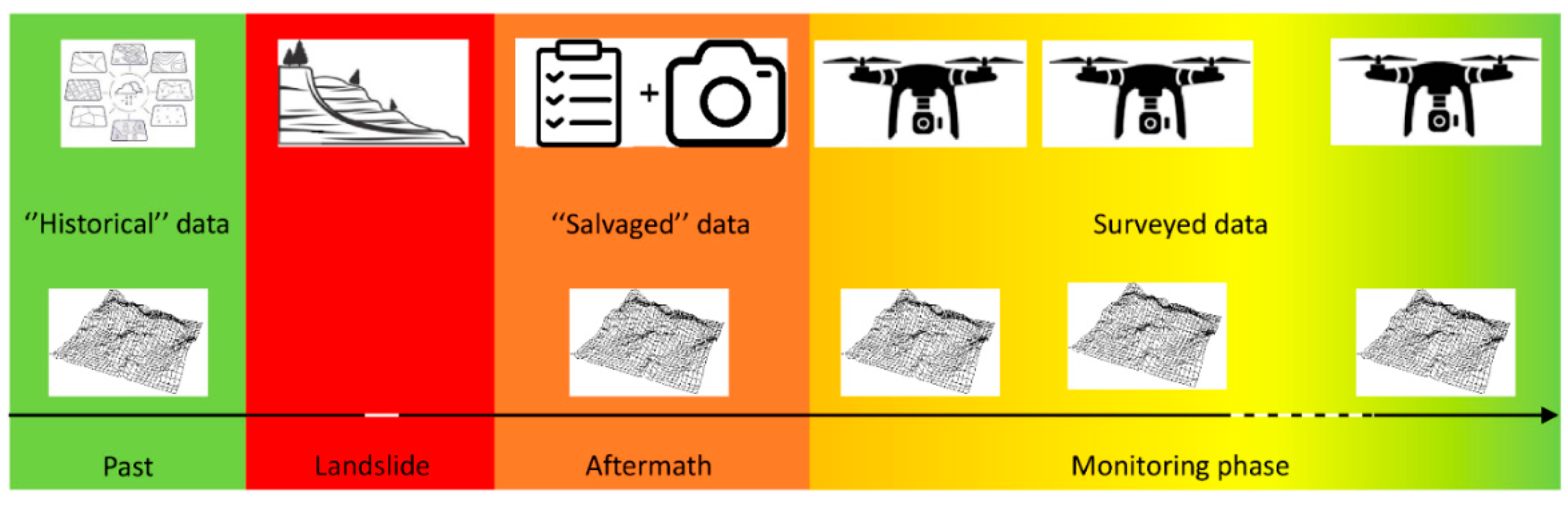
2. Methods and Materials
3. Results
3.1. Conventional Monitoring
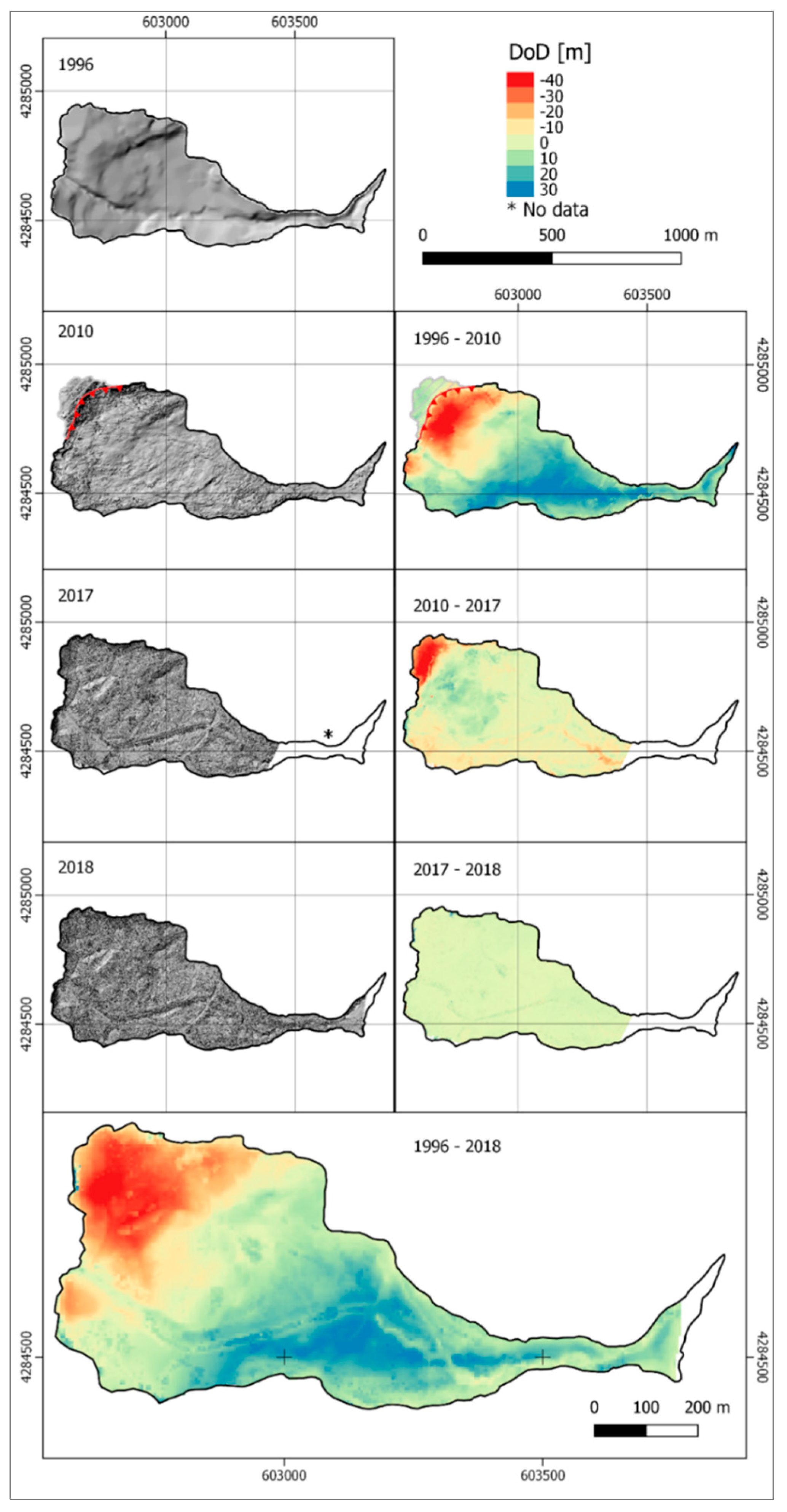
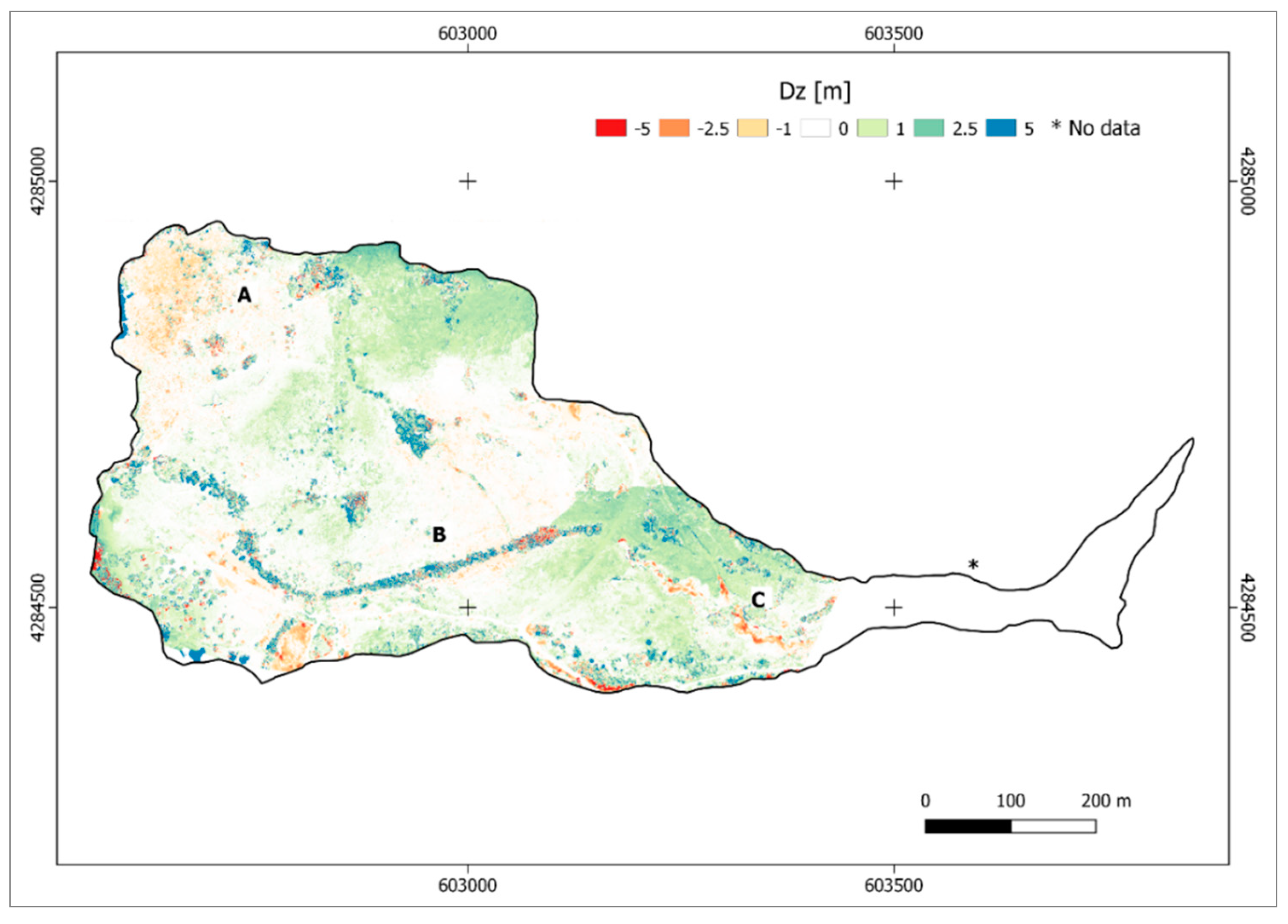
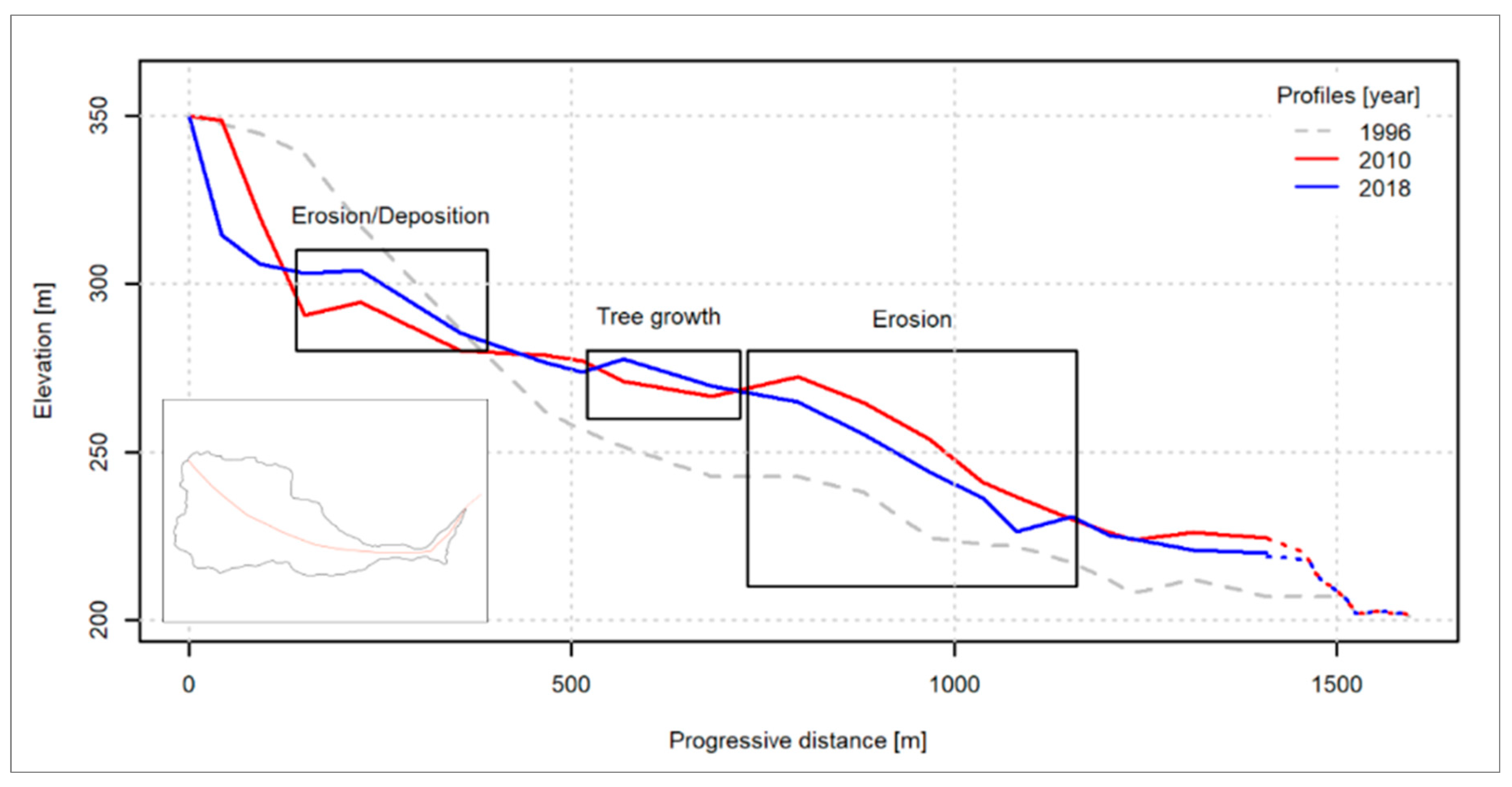
3.2. Geomatic Monitoring
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gariano, S.L.; Guzzetti, F. Landslides in a changing climate. Earth Sci. Rev. 2016, 162, 227–252. [Google Scholar] [CrossRef] [Green Version]
- Soldati, M.; Corsini, A.; Pasuto, A. Landslides and climate change in the Italian Dolomites since the Late glacial. Catena 2004, 55, 141–161. [Google Scholar] [CrossRef]
- Kirschbaum, D.B.; Adler, R.; Hong, Y.; Hill, S.; Lerner-Lam, A. A global landslide catalog for hazard applications: Method, results, and limitations. Nat. Hazards 2010, 52, 561–575. [Google Scholar] [CrossRef] [Green Version]
- Gullà, G.; Caloiero, T.; Coscarelli, R.; Petrucci, O. A proposal for a methodological approach to the characterisation of widespread landslide events: An application to Southern Italy. Nat. Hazards Earth Syst. Sci. 2012, 12, 165–173. [Google Scholar] [CrossRef] [Green Version]
- Aleotti, P.; Chowdhury, R. Landslide hazard assessment: Summary review and new perspectives. Bull. Eng. Geol. Environ. 1999, 58, 21–44. [Google Scholar] [CrossRef]
- Borrelli, L.; Gullà, G. Tectonic constraints on a deep-seated rock slide in weathered crystalline rocks. Geomorphology 2017, 290, 288–316. [Google Scholar] [CrossRef]
- Aceto, L.; Antronico, L.; Borrelli, L.; Coscarelli, R.; Pasqua, A.A.; Petrucci, O.; Reali, C.; Guardia, S.; Valente, E. Relazione Attività Svolte—Comune di Maierato. “Studi ed Indagini Geologiche, Geotecniche, Idrologiche ed Idrauliche nel Comune di Maierato” “Monitoraggio Finalizzato alla Gestione Dell’emergenza nel Comune di Maierato” “Studi ed Indagini Geologiche, Geo. 2014. Available online: http://www.cnr.it/prodotto/i/288410 (accessed on 3 December 2019).
- Gullà, G.; Aceto, L.; Antronico, L.; Borrelli, L.; Coscarelli, R.; Perri, F. A smart geotechnical model in emergency conditions: A case study of a medium-deep landslide in Southern Italy. Eng. Geol. 2018, 234, 138–152. [Google Scholar] [CrossRef]
- Gullà, G.; Calcaterra, S.; Gambino, P.; Borrelli, L.; Muto, F. Long-term measurements using an integrated monitoring network to identify homogeneous landslide sectors in a complex geo-environmental context (Lago, Calabria, Italy). Landslides 2018, 15, 1503–1521. [Google Scholar] [CrossRef]
- Gullà, G.; Peduto, D.; Borrelli, L.; Antronico, L.; Fornaro, G. Geometric and kinematic characterization of landslides affecting urban areas: The Lungro case study (Calabria, Southern Italy). Landslides 2017, 14, 171–188. [Google Scholar] [CrossRef]
- Chae, B.G.; Park, H.J.; Catani, F.; Simoni, A.; Berti, M. Landslide prediction, monitoring and early warning: A concise review of state-of-the-art. Geosci. J. 2017, 21, 1033–1070. [Google Scholar] [CrossRef]
- Mikkelsen, P.E. Field instrumentation. Spec. Rep. Natl. Res. Counc. Transp. Res. Board 1996, 247, 278–316. [Google Scholar]
- Krauter, E. Special lecture: Applicability and usefulness of field measurements on unstable slopes. In Proceedings of the International Symposium on Landslides. 5, Lausanne, Switzerland, 10–15 July 1988; Volume 1, pp. 367–373. [Google Scholar]
- Arbanas, Ž.; Sassa, K.; Nagai, O.; Jagodnik, V.; Vivoda, M.; Jovančević, S.D.; Peranić, J.; Ljutić, K. A landslide monitoring and early warning system using integration of GPS, TPS and conventional geotechnical monitoring methods. In Landslide Science for a Safer Geoenvironment: Volume 2: Methods of Landslide Studies; Springer International Publishing: Cham, Switzerland, 2014; pp. 631–636. ISBN 9783319050508. [Google Scholar]
- Calcaterra, S.; Cesi, C.; Di Maio, C.; Gambino, P.; Merli, K.; Vallario, M.; Vassallo, R. Surface displacements of two landslides evaluated by GPS and inclinometer systems: A case study in Southern Apennines, Italy. Nat. Hazards 2012, 61, 257–266. [Google Scholar] [CrossRef]
- Hong, C.Y.; Zhang, Y.F.; Li, G.W.; Zhang, M.X.; Liu, Z.X. Recent progress of using Brillouin distributed fiber optic sensors for geotechnical health monitoring. Sens. Actuators A Phys. 2017, 258, 131–145. [Google Scholar] [CrossRef]
- Lollino, G.; Arattano, M.; Cuccureddu, M. The use of the automatic inclinometric system for landslide early warning: The case of Cabella Ligure (North-Western Italy). Phys. Chem. Earth Parts A B C 2002, 27, 1545–1550. [Google Scholar] [CrossRef]
- Allasia, P.; Lollino, G.; Godone, D.; Giordan, D. Deep displacements measured with a robotized inclinometer system. In Proceedings of the 10th International Symposium on Field Measurements in Geomechanics—FMGM2018, Rio De Janeiro, Brazil, 16–20 July 2018. [Google Scholar]
- Gullà, G. Field Monitoring in Sample Sites: Hydrological Response of Slopes with Reference to Widespread Landslide Events. Procedia Earth Planet. Sci. 2014, 9, 44–53. [Google Scholar] [CrossRef] [Green Version]
- Jaboyedoff, M.; Ornstein, P.; Rouiller, J.-D. Design of a geodetic database and associated tools for monitoring rock-slope movements: The example of the top of Randa rockfall scar. Nat. Hazards Earth Syst. Sci. 2004, 4, 187–196. [Google Scholar] [CrossRef] [Green Version]
- Gili, J.A.; Corominas, J.; Rius, J. Using Global Positioning System techniques in landslide monitoring. Eng. Geol. 2000, 55, 167–192. [Google Scholar] [CrossRef]
- Baldo, M.; Bicocchi, C.; Chiocchini, U.; Giordan, D.; Lollino, G. LIDAR monitoring of mass wasting processes: The Radicofani landslide, Province of Siena, Central Italy. Geomorphology 2009, 105, 193–201. [Google Scholar] [CrossRef]
- Tarchi, D.; Casagli, N.; Fanti, R.; Leva, D.D.; Luzi, G.; Pasuto, A.; Pieraccini, M.; Silvano, S. Landslide monitoring by using ground-based SAR interferometry: An example of application to the Tessina landslide in Italy. Eng. Geol. 2003, 68, 15–30. [Google Scholar] [CrossRef]
- Torrero, L.; Seoli, L.; Molino, A.; Giordan, D.; Manconi, A.; Allasia, P.; Baldo, M. The use of micro-uav to monitor active landslide scenarios. In Engineering Geology for Society and Territory—Volume 5: Urban Geology, Sustainable Planning and Landscape Exploitation; Springer International Publishing: Cham, Switzerland, 2015; pp. 701–704. ISBN 9783319090481. [Google Scholar]
- Stumpf, A.; Malet, J.P.; Allemand, P.; Pierrot-Deseilligny, M.; Skupinski, G. Ground-based multi-view photogrammetry for the monitoring of landslide deformation and erosion. Geomorphology 2015, 231, 130–145. [Google Scholar] [CrossRef]
- Nichol, J.; Wong, M.S. Satellite remote sensing for detailed landslide inventories using change detection and image fusion. Int. J. Remote Sens. 2005, 26, 1913–1926. [Google Scholar] [CrossRef]
- Tralli, D.M.; Blom, R.G.; Zlotnicki, V.; Donnellan, A.; Evans, D.L. Satellite remote sensing of earthquake, volcano, flood, landslide and coastal inundation hazards. ISPRS J. Photogramm. Remote Sens. 2005, 59, 185–198. [Google Scholar] [CrossRef]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The use of Unmanned Aerial Vehicles (UAV) for engineering geology applications. Bull. Eng. Geol. Environ. 2020, in press. [Google Scholar]
- Chao, H.; Cao, Y.; Chen, Y. Autopilots for small unmanned aerial vehicles: A survey. Int. J. Control. Autom. Syst. 2010, 8, 36–44. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Chudý, F.; Slámová, M.; Tomaštík, J.; Prokešová, R.; Mokroš, M. Identification of micro-scale landforms of landslides using precise digital elevation models. Geosciences 2019, 9, 117. [Google Scholar] [CrossRef] [Green Version]
- Kaiser, A.; Neugirg, F.; Rock, G.; Müller, C.; Haas, F.; Ries, J.; Schmidt, J. Small-scale surface reconstruction and volume calculation of soil erosion in complex moroccan Gully morphology using structure from motion. Remote Sens. 2014, 6, 7050–7080. [Google Scholar] [CrossRef] [Green Version]
- Marek, L.; Miřijovský, J.; Tuček, P. Monitoring of the shallow landslide using UAV photogrammetry and geodetic measurements. In Engineering Geology for Society and Territory—Volume 2: Landslide Processes; Springer International Publishing: Cham, Switzerland, 2015; pp. 113–116. ISBN 9783319090573. [Google Scholar]
- Pajares, G. Overview and Current Status of Remote Sensing Applications Based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef] [Green Version]
- Borrelli, L.; Antronico, L.; Gullà, G.; Sorriso-Valvo, G.M. Geology, geomorphology and dynamics of the 15 February 2010 Maierato landslide (Calabria, Italy). Geomorphology 2014, 208, 50–73. [Google Scholar] [CrossRef]
- Nico, G.; Borrelli, L.; Di Pasquale, A.; Antronico, L.; Gullà, G. Monitoring of an Ancient Landslide Phenomenon by GBSAR Technique in the Maierato Town (Calabria, Italy). In Engineering Geology for Society and Territory—Volume 2; Springer International Publishing: Cham, Switzerland, 2015; pp. 129–133. [Google Scholar]
- Gattinoni, P.; Scesi, L. Landslide hydrogeological susceptibility of Maierato (Vibo Valentia, Southern Italy). Nat. Hazards 2013, 66, 629–648. [Google Scholar] [CrossRef]
- Guerricchio, A.; Doglioni, A.; Fortunato, G.; Galeandro, A.; Guglielmo, E.; Versace, P.; Simeone, V. Landslide hazard connected to deep seated gravitational slope deformations and prolonged rainfall: Maierato landslide case history. Soc. Geol. Ital. 2012, 21, 574–576. [Google Scholar]
- Antronico, L.; Borrelli, L.; Gullà, G.; Sorriso-Valvo, M. La frana di Maierato (Calabria, Italia meridionale) del febbraio 2010: Caratteristiche geomorfologiche ed evoluzione. GEAM Geoing. Ambient. Min. 2010, 2, 15–26. [Google Scholar]
- Conte, E.; Donato, A.; Pugliese, L.; Troncone, A. Kinematics of the Maierato Landslide (Calabria, Southern Italy). Procedia Eng. 2016, 158, 194–199. [Google Scholar] [CrossRef] [Green Version]
- Cignetti, M.; Godone, D.; Wrzesniak, A.; Giordan, D. Structure from motion multisource application for landslide characterization and monitoring: The champlas du col case study, Sestriere, north-western Italy. Sensors 2019, 19, 2364. [Google Scholar] [CrossRef] [Green Version]
- Cruden, D.; Varnes, D. Landslides: Investigation and mitigation. Chapter 3—Landslide types and processes. Transp. Res. Board Spec. Rep. 1996, 247, 36–75. [Google Scholar]
- Allasia, P.; Baldo, M.; Giordan, D.; Godone, D.; Wrzesniak, A.; Lollino, G. Near Real Time Monitoring Systems and Periodic Surveys Using a Multi Sensors UAV: The Case of Ponzano Landslide. In IAEG/AEG Annual Meeting Proceedings, San Francisco, California, 2018—Volume 1; Springer International Publishing: Cham, Switzerland, 2018; pp. 303–310. [Google Scholar]
- MicaSense Rededge 2019. Available online: https://www.micasense.com/ (accessed on 4 November 2019).
- Euler, H.J.; Keenan, C.R.; Zebhauser, B.E.; Wübbena, G. Study of a Simplified Approach in Utilizing Information from Permanent Reference Station Arrays. In Proceedings of the National Technical Meeting of the Satellite Division of the Institute of Navigation, (ION GPS 2001), Salt Lake City, UT, USA, 11–14 September 2001; Volume 104, pp. 371–391. [Google Scholar]
- Lucieer, A.; Jong, S.M.D.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C.; Turner, D.; Lucieer, A.; Watson, C. An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef] [Green Version]
- Giordan, D.; Hayakawa, Y.; Nex, F.; Remondino, F.; Tarolli, P. Review article: The use of remotely piloted aircraft systems (RPASs) for natural hazards monitoring and management. Nat. Hazards Earth Syst. Sci. 2018, 18, 1079–1096. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Y.; Yu, T.; Egozi, R.; Tarolli, P. Pioneer Vegetation Detection by Hyperspectral Images on Temporal Landslides: A case study of Tzengwen catchment upstream, Taiwan. In Proceedings of the 19th EGU General Assembly, EGU2017, Vienna, Austria, 23–28 April 2017. [Google Scholar]
- Dingle Robertson, L.; King, D.J.; Davies, C. Assessing Land Cover Change and Anthropogenic Disturbance in Wetlands Using Vegetation Fractions Derived from Landsat 5 TM Imagery (1984–2010). Wetlands 2015, 35, 1077–1091. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Jensen, J.; Raber, G.; Tullis, J.; Davis, B.A.; Thompson, G.; Schuckman, K. An Evaluation of Lidar-derived Elevation and Terrain Slope in Leaf-off Conditions. Photogramm. Eng. Remote Sens. 2005, 71, 817–823. [Google Scholar] [CrossRef] [Green Version]
- Godone, D.; Giordan, D.; Baldo, M. Rapid mapping application of vegetated terraces based on high resolution airborne LiDAR. Geomat. Nat. Hazards Risk 2018, 9, 970–985. [Google Scholar] [CrossRef] [Green Version]
- Conforti, M.; Pascale, S.; Robustelli, G.; Sdao, F. Evaluation of prediction capability of the artificial neural networks for mapping landslide susceptibility in the Turbolo River catchment (northern Calabria, Italy). Catena 2014, 113, 236–250. [Google Scholar] [CrossRef]
- Taramelli, A.; Paola, R.; Ardizzone, F. Comparison of SRTM elevation data with cartographically derived DEMs in Italy LAMPRE View project Integrated assessment of geo-hydrological instability phenomena in the Apulia region, interpretative models and definition of rainfall thresholds for landsli. Rev. Geogr. Acad. 2008, 2, 41–52. [Google Scholar]
- Pavanelli, D.; Gennari, A.; Sulpizi, L.; Cavazza, C. Vegetation Dynamics on Clay Landslides After Bioengineering Works: Three Case Studies in North Apennines, Italy. In Recent Advances in Geo-Environmental Engineering, Geomechanics and Geotechnics, and Geohazards; Springer: Cham, Switzerland, 2019; pp. 445–448. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Type | Sensor |
|---|---|---|
| 05 Dember 2017 | PG | 1″ CMOS (20 MPixel) Lens FOV 84° 8.8 mm/24 mm (35 mm format equivalent) f/2.8–f/11 auto focus ISO Photo: 400 Shutter Speed: 1/1000 s Shutter mode: time priority |
| 27 November 2018 | PG | |
| 27 November 2018 | MS | Micasense RedEdge (5 bands) 3.6 MPixel/band |
| Year | Source | Methodology | Ground Resolution [m] | Point Density [points/m2] | Image Type |
|---|---|---|---|---|---|
| 1996 | Technical map | Interpolation | 5.00 | NA | NA |
| 2010 | Reconnaissance | SfM | 0.60 | 2.85 | RGB |
| 2017 | UAV | SfM | 0.05 | 402 | RGB |
| 2018 | UAV | SfM | 0.05 | 419 | RGB |
| Year | GCP | XY Error [cm] | Z Error [cm] | Total Error [cm] |
|---|---|---|---|---|
| 2010 | 8 | 63.09 | 14.29 | 64.69 |
| 2017 | 11 | 2.67 | 2.25 | 3.49 |
| 2018 | 13 | 1.12 | 0.54 | 1.24 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Godone, D.; Allasia, P.; Borrelli, L.; Gullà, G. UAV and Structure from Motion Approach to Monitor the Maierato Landslide Evolution. Remote Sens. 2020, 12, 1039. https://doi.org/10.3390/rs12061039
Godone D, Allasia P, Borrelli L, Gullà G. UAV and Structure from Motion Approach to Monitor the Maierato Landslide Evolution. Remote Sensing. 2020; 12(6):1039. https://doi.org/10.3390/rs12061039
Chicago/Turabian StyleGodone, Danilo, Paolo Allasia, Luigi Borrelli, and Giovanni Gullà. 2020. "UAV and Structure from Motion Approach to Monitor the Maierato Landslide Evolution" Remote Sensing 12, no. 6: 1039. https://doi.org/10.3390/rs12061039
APA StyleGodone, D., Allasia, P., Borrelli, L., & Gullà, G. (2020). UAV and Structure from Motion Approach to Monitor the Maierato Landslide Evolution. Remote Sensing, 12(6), 1039. https://doi.org/10.3390/rs12061039