
Wave-Filtered Surf Zone Circulation under High-Energy Waves Derived from Video-Based Optical Systems

 , , , , and
, , , , and
Abstract
:
1. Introduction
2. Optical Flow Algorithm
3. La Petite Chambre d’Amour Beach Experiment
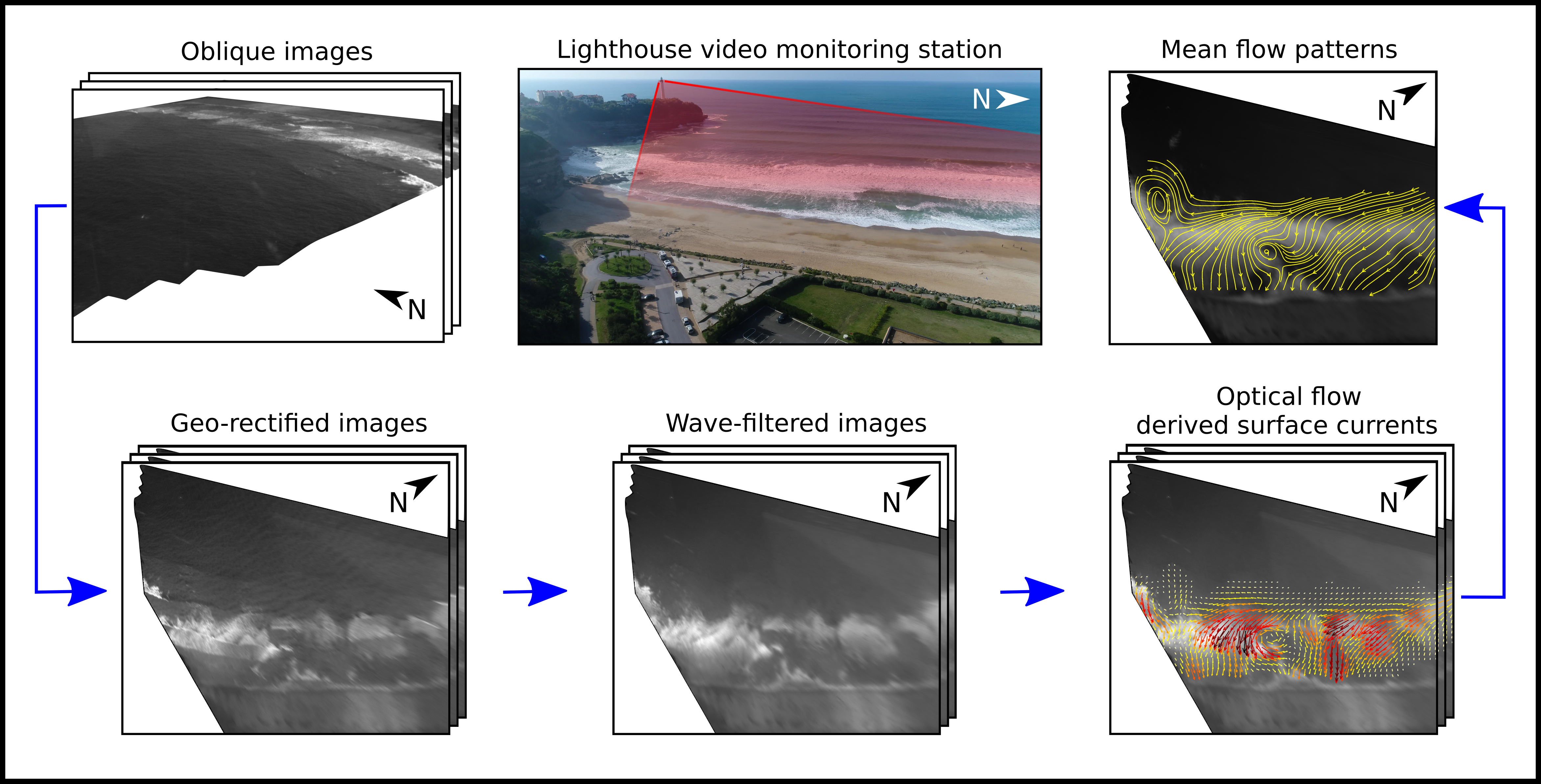
3.1. Study Site
3.2. Field Experiment
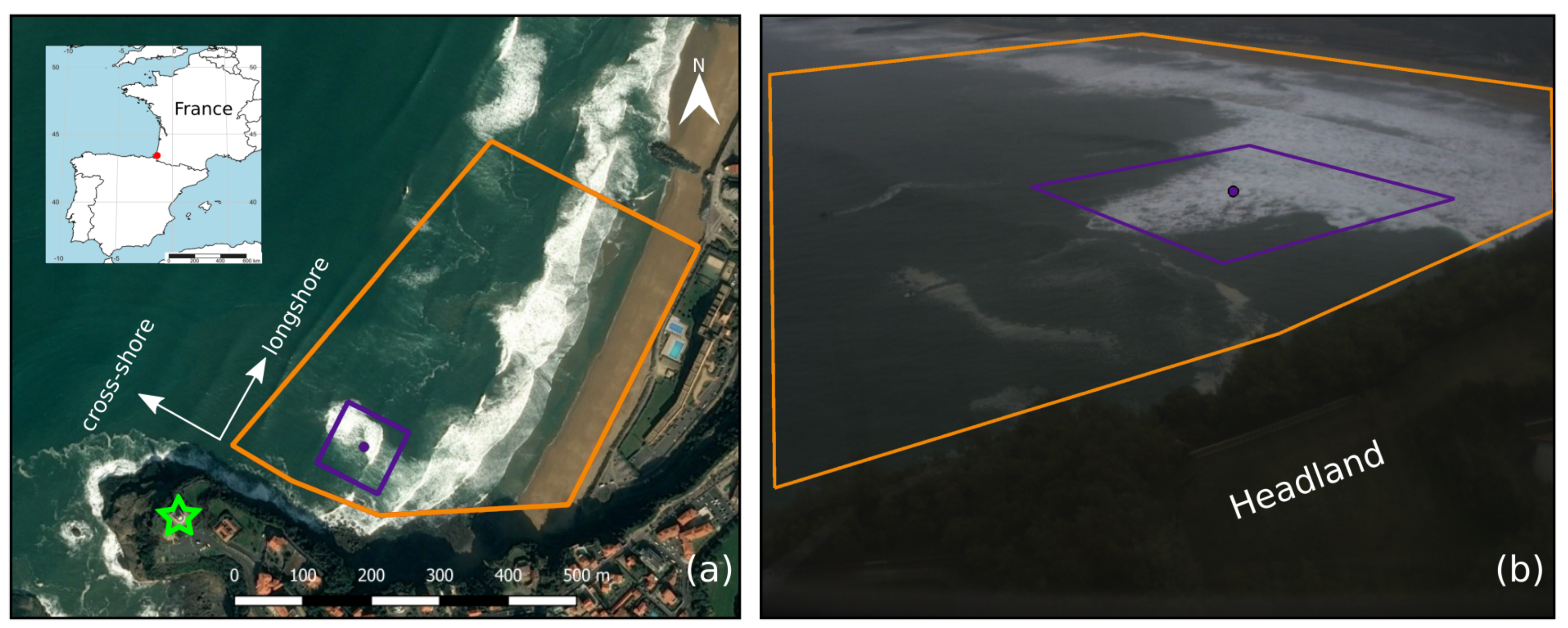
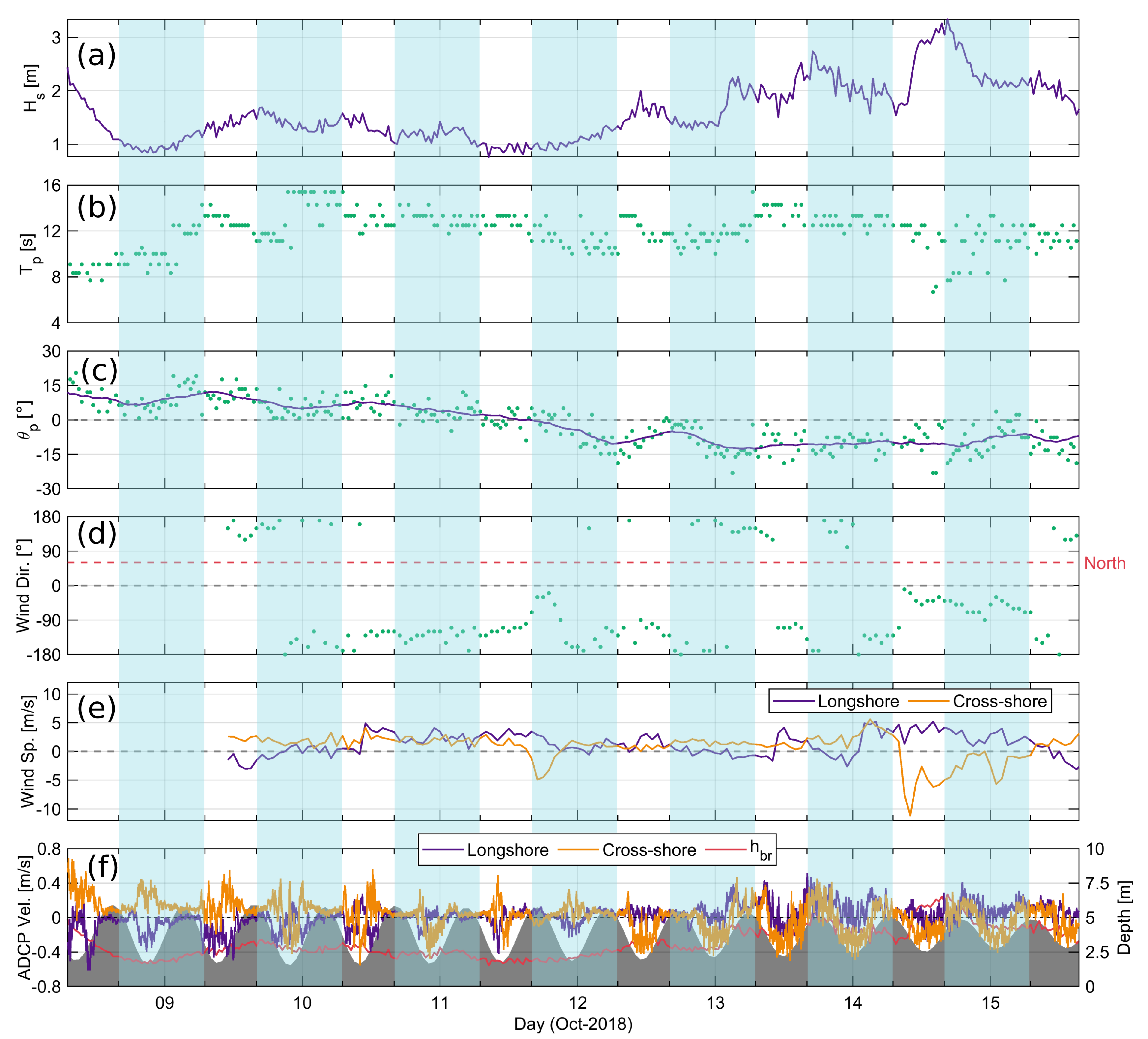
3.2.1. Field Conditions and Overall Nearshore Circulation
3.2.2. Video Data
3.2.3. ADCP Data
3.2.4. Drifter Data
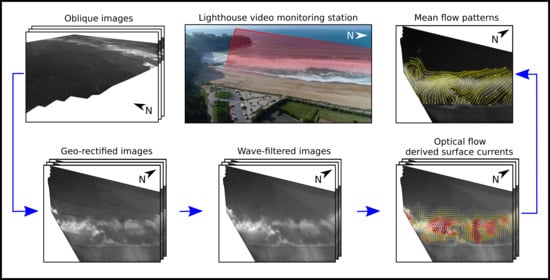
4. Video Processing
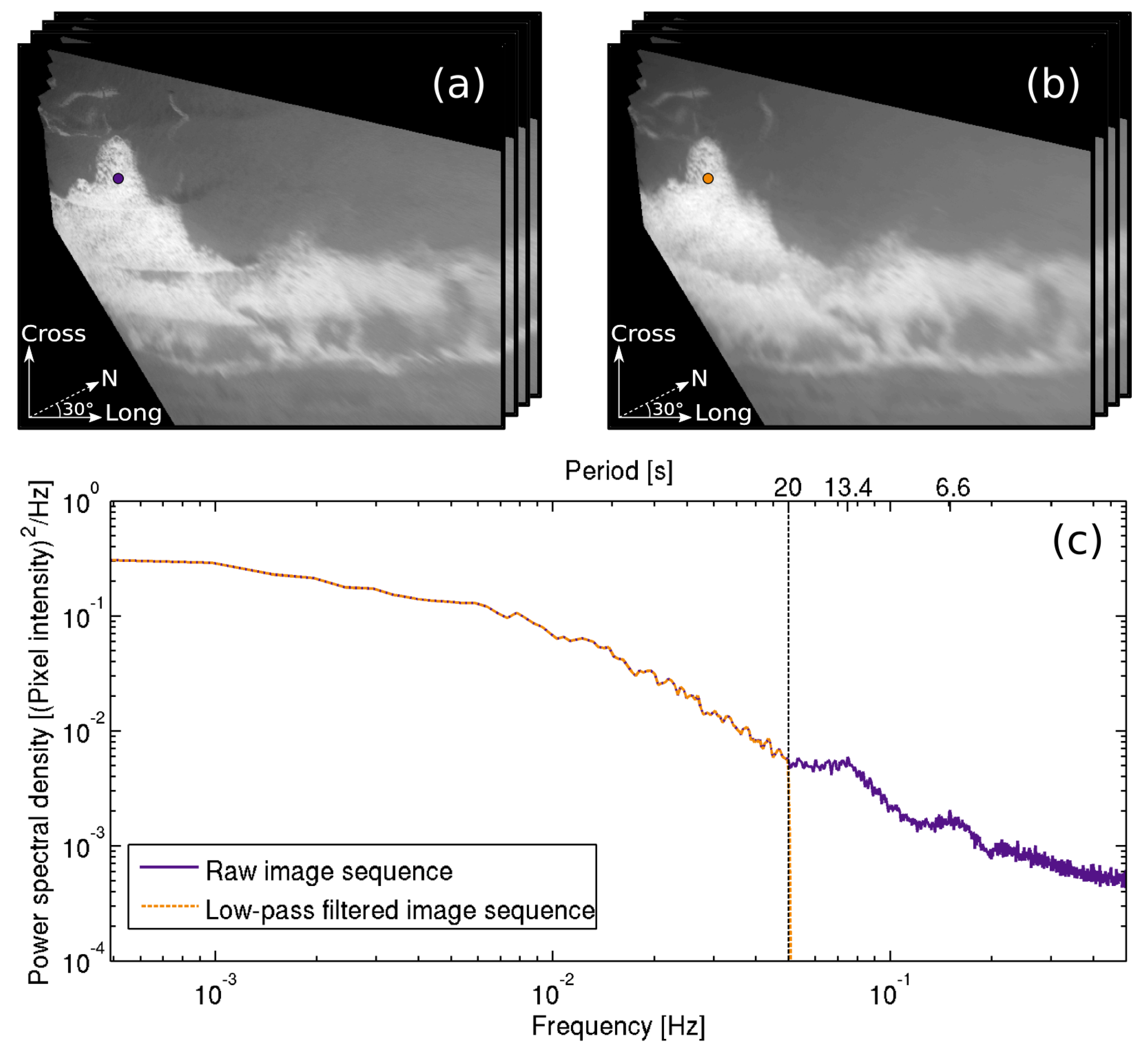
4.1. Image Pre-Processing
4.2. Implementation and Assessment
5. Results
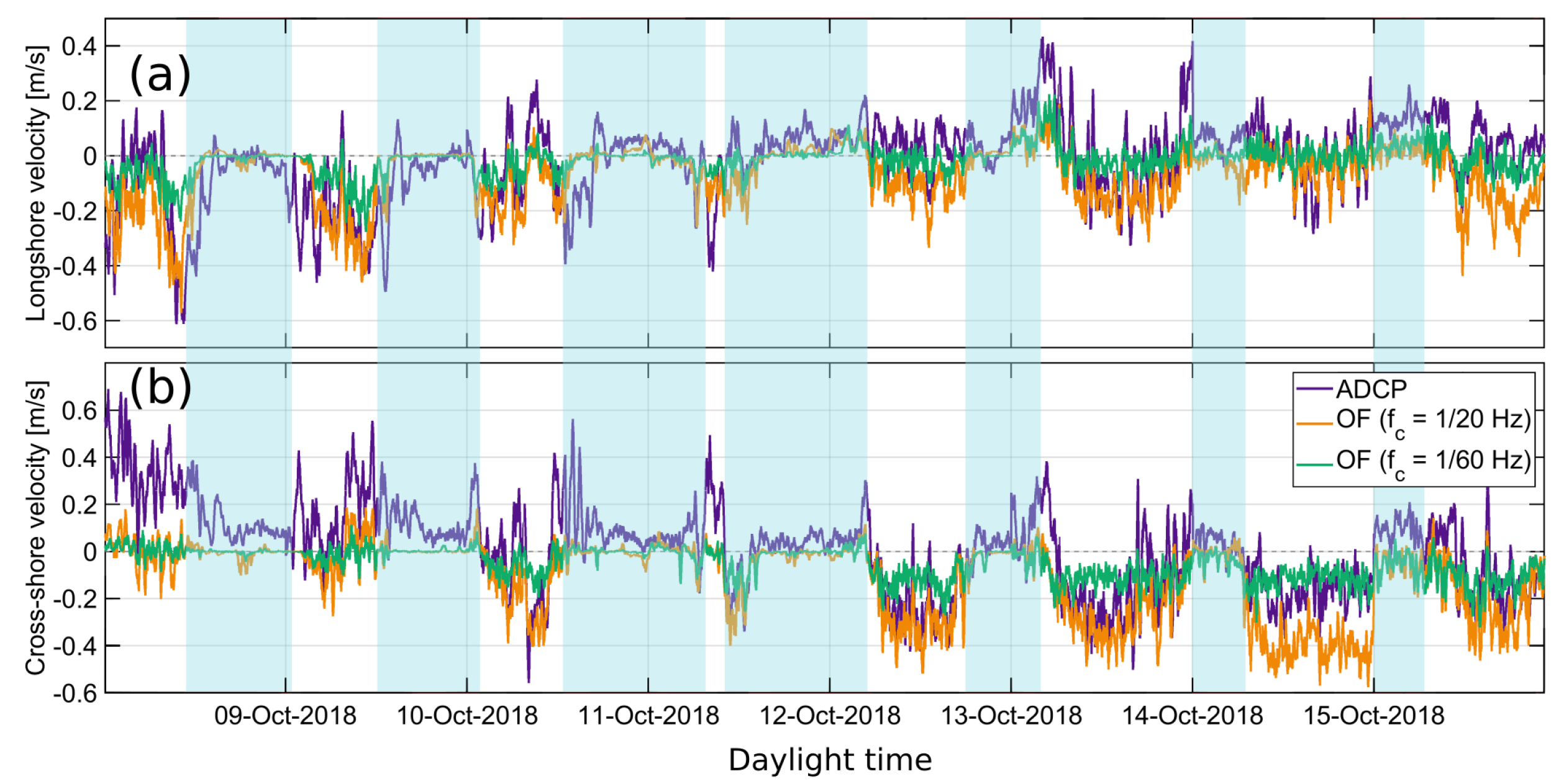
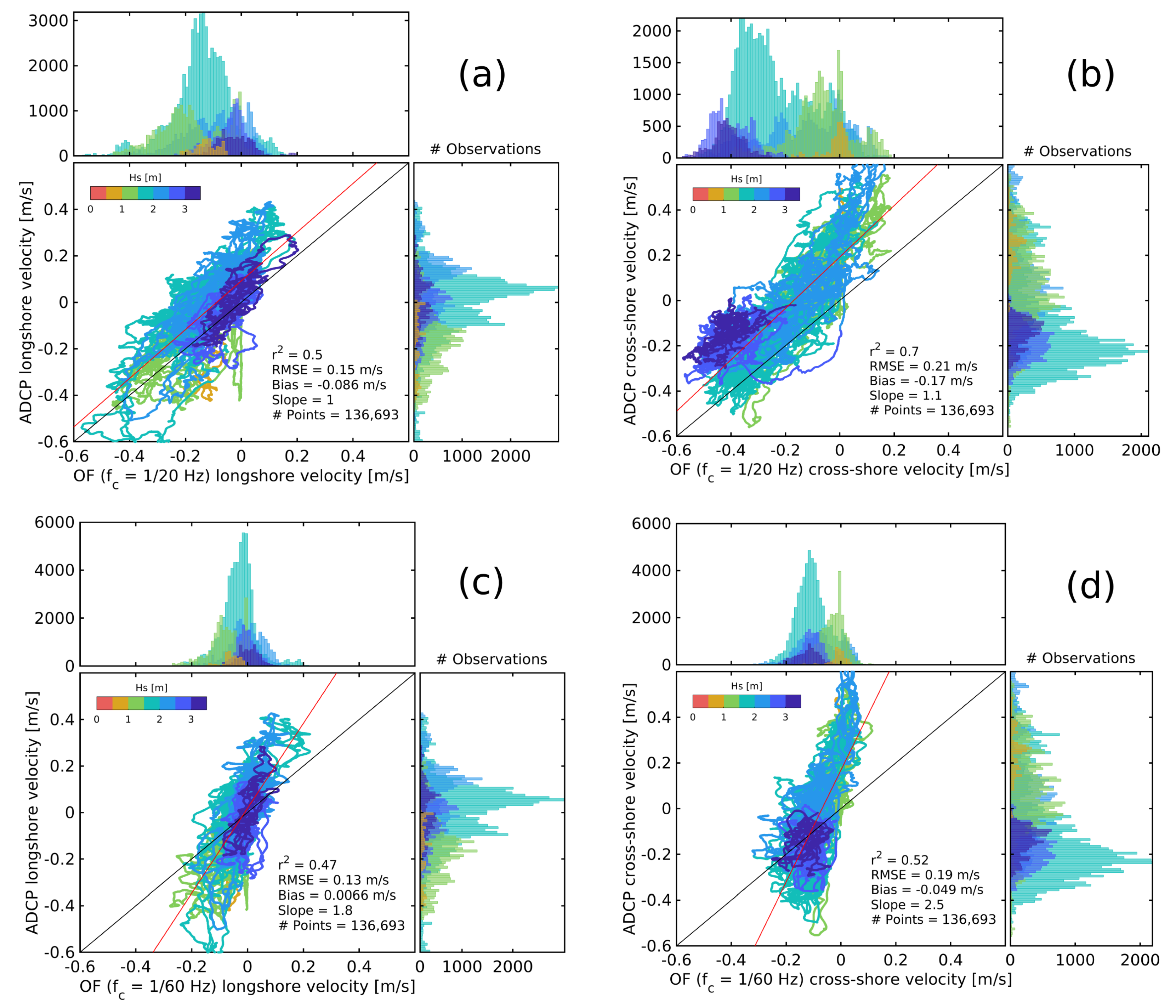
5.1. 1-Week Continuous Surface Currents Measurements (8–15 October 2018)
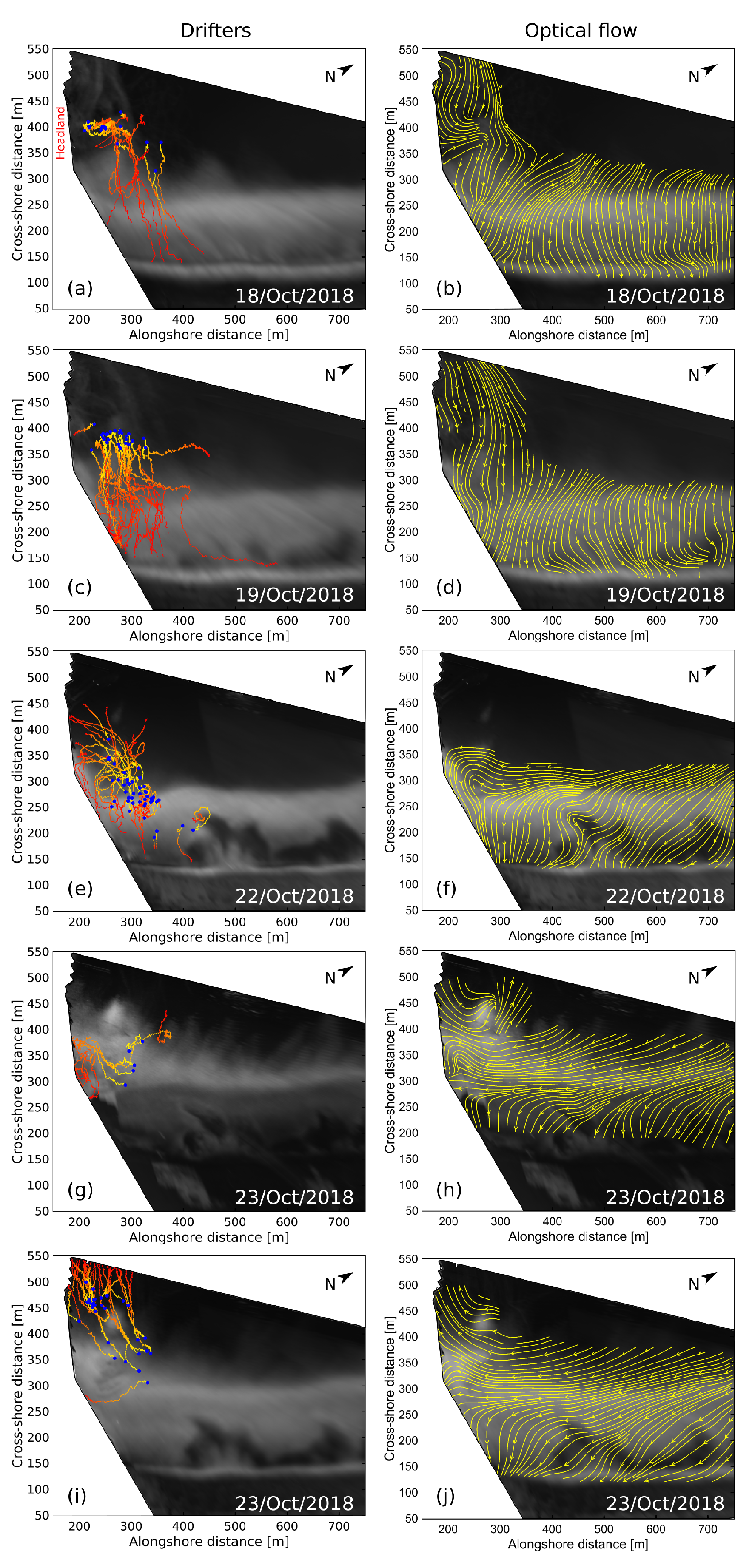
5.2. Drifter Deployments
6. Discussion
6.1. Comparison to Other Optical Flow-Based Methods
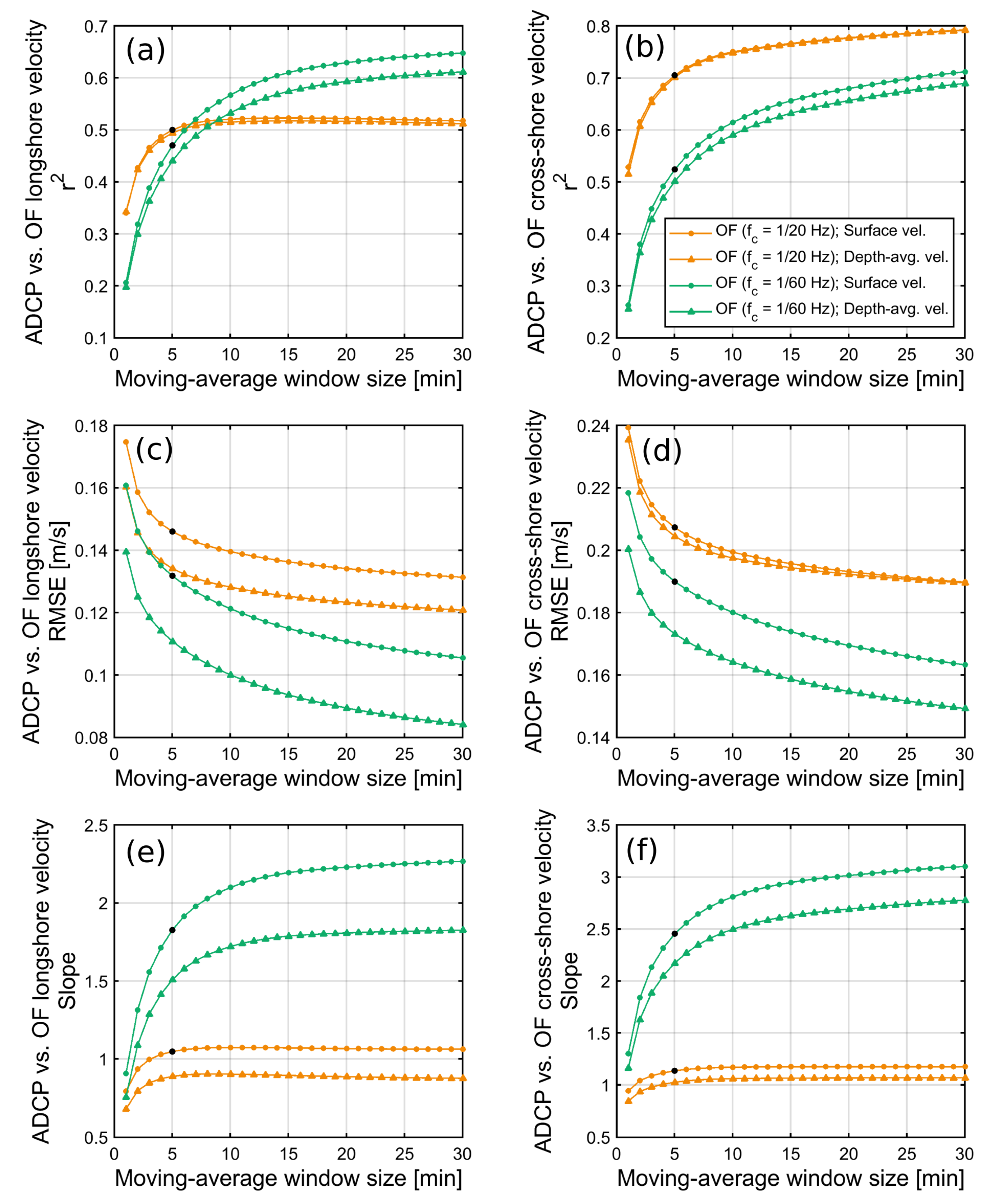
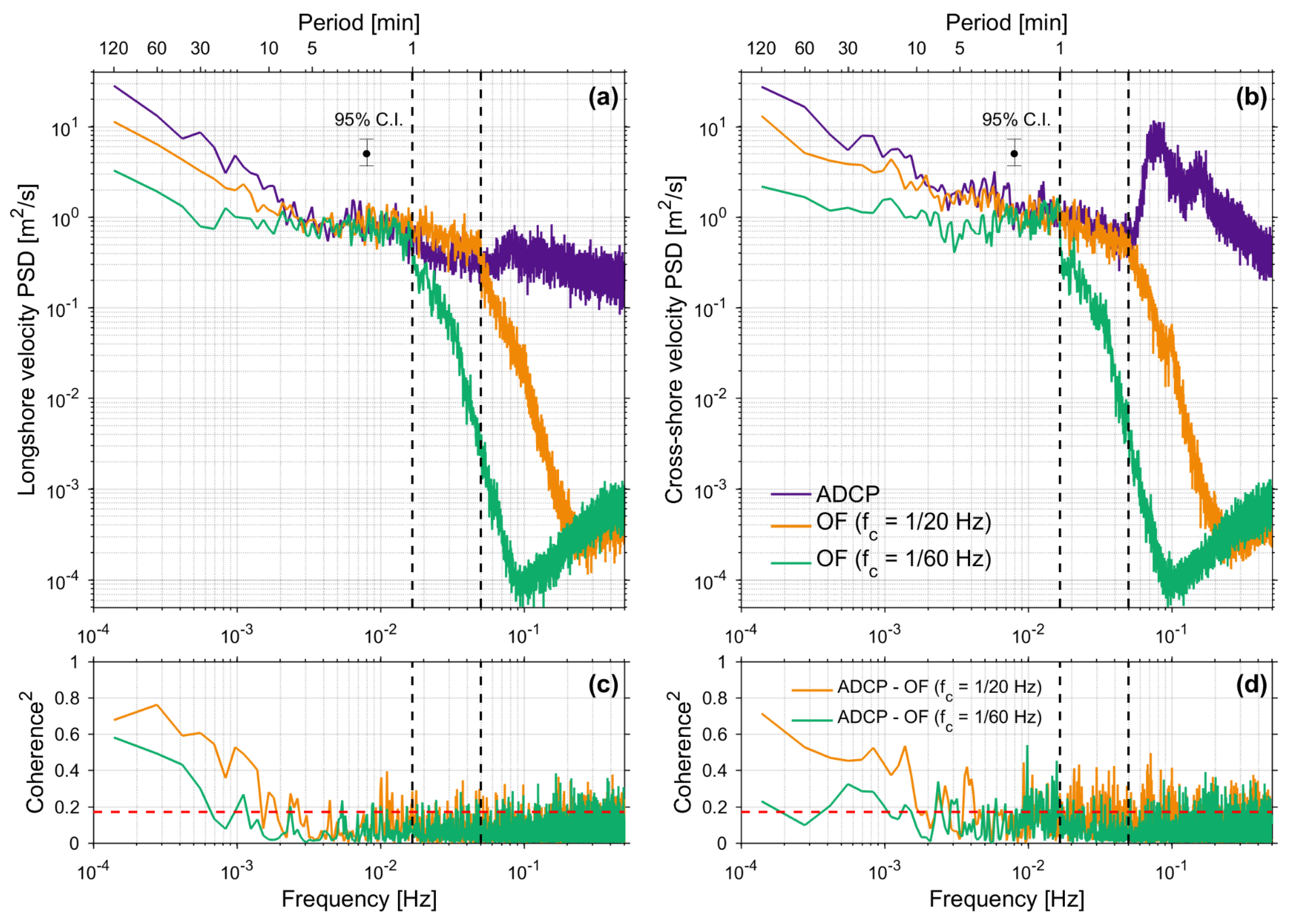
6.2. Low-Pass Filter Cutoff-Frequency Selection
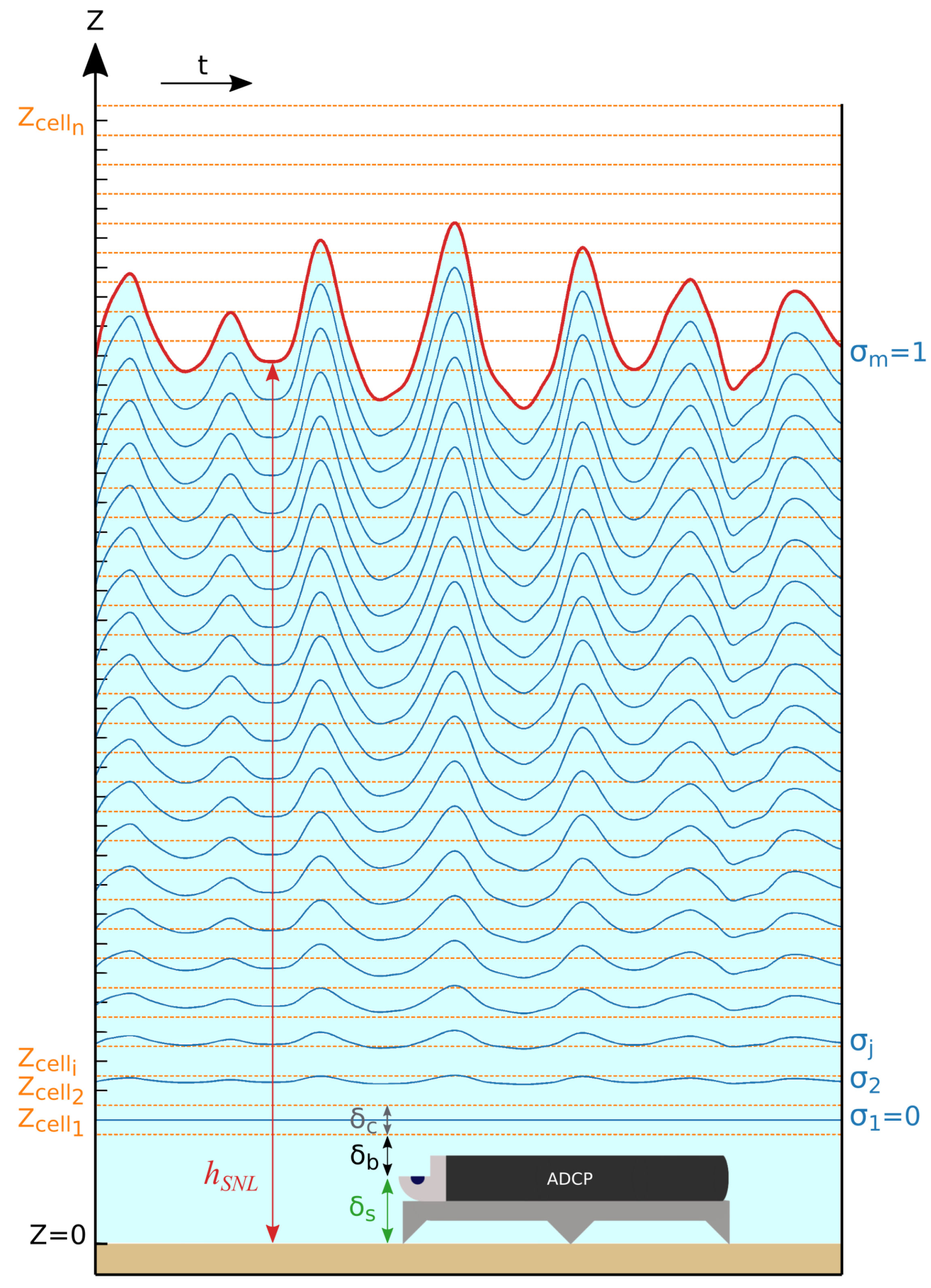
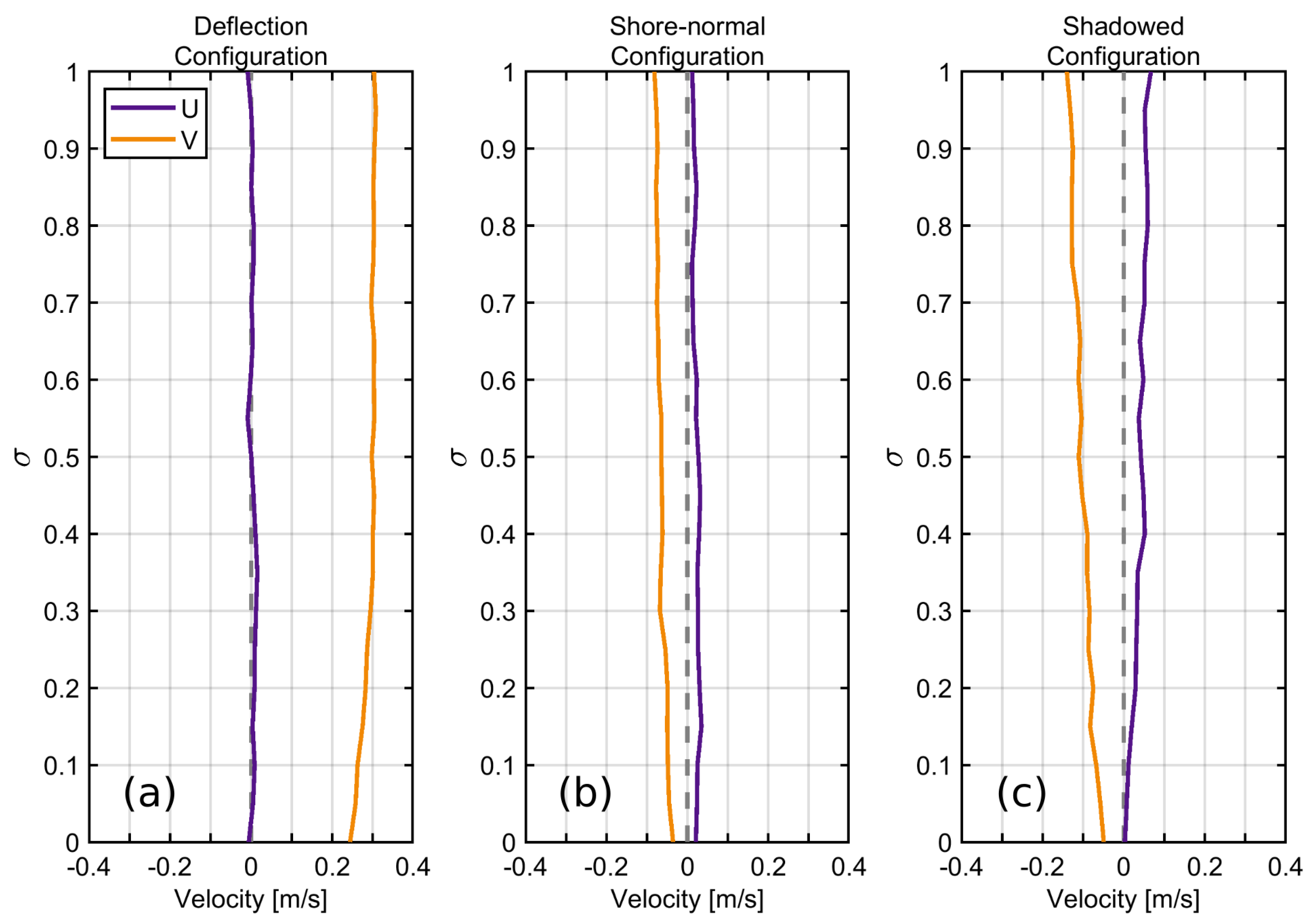
6.3. ADCP Measurements: Surface vs. Depth-Averaged Velocities
6.4. Sources of Error
6.5. Recommendations and Future Work
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| OF | Optical Flow |
| VLF | Very Low Frequency |
| UAV | Unmanned Aerial Vehicle |
| PIV | Particle Image Velocimetry |
| WAM | Wave averaged movie |
| RMSE | Root mean square error |
| ADCP | Acoustic Doppler Current Profiler |
| PCA | La Petite Chambre d’Amour |
| CMAR | Coastal Marine Applied Research |
| GCPs | Ground Control Points |
| PSD | Power Spectral Density |
| ADV | Acoustic Doppler Velocimeter |
Appendix A. Optical Flow Algorithm Setup

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Notation | Value | Note |
|---|---|---|---|
| Lagrange multipliers | lambda_1 for the Horn-Schunk estimator | 20 | regularization parameters in |
| lambda_2 for the Liu-Shen estimator | 2000 | variational solution | |
| scale factor for downsampling of | scale_im | 0.5 | reduction of initial image size in |
| raw images | coarse-to-fine scheme | ||
| number of iterations | no_iteration | 1 | iteration in coarse-to-fine scheme |
| Gaussian filter size | size_filter | 4 px | removing random image noise |
| Gaussian filter size | size_average | 30 px | correction for local illumination |
| intensity change |
References
- Castelle, B.; Bonneton, P.; Senechal, N.; Dupuis, H.; Butel, R.; Michel, D. Dynamics of wave-induced currents over an alongshore non-uniform multiple-barred sandy beach on the Aquitanian Coast, France. Cont. Shelf Res. 2006, 26, 113–131. [Google Scholar] [CrossRef]
- Komar, P.D. Beach Processes and Sedimentation; Prentice Hall: Hoboken, NJ, USA, 1998; Volume 539. [Google Scholar]
- Chickadel, C.C.; Holman, R.A.; Freilich, M.H. An optical technique for the measurement of longshore currents. J. Geophys. Res. Ocean. 2003, 108. [Google Scholar] [CrossRef] [Green Version]
- Inman, D.L. Nearshore Processes. 2002. Available online: https://escholarship.org/uc/item/204201x5 (accessed on 1 November 2020).
- Castelle, B.; Scott, T.; Brander, R.; McCarroll, R. Rip current types, circulation and hazard. Earth Sci. Rev. 2016, 163, 1–21. [Google Scholar] [CrossRef]
- Castelle, B.; McCarroll, R.J.; Brander, R.W.; Scott, T.; Dubarbier, B. Modelling the alongshore variability of optimum rip current escape strategies on a multiple rip-channelled beach. Nat. Hazards 2016, 81, 663–686. [Google Scholar] [CrossRef]
- MacMahan, J.H.; Thornton, E.B.; Reniers, A.J. Rip current review. Coast. Eng. 2006, 53, 191–208. [Google Scholar] [CrossRef] [Green Version]
- Castelle, B.; Michallet, H.; Marieu, V.; Leckler, F.; Dubardier, B.; Lambert, A.; Berni, C.; Bonneton, P.; Barthélemy, E.; Bouchette, F. Laboratory experiment on rip current circulations over a moveable bed: Drifter measurements. J. Geophys. Res. Ocean. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Rijn, L.C. Manual Sediment Transport Measurements in Rivers, Estuaries and Coastal Seas; Aqua Publications: Delft, The Netherlands, 2007. [Google Scholar]
- Inch, K. Surf zone hydrodynamics: Measuring waves and currents. Geomorphol. Tech. 2014, 3, 1–13. [Google Scholar]
- Almar, R.; Larnier, S.; Castelle, B.; Scott, T.; Floc’h, F. On the use of the Radon transform to estimate longshore currents from video imagery. Coast. Eng. 2016, 114, 301–308. [Google Scholar] [CrossRef] [Green Version]
- Streßer, M.; Carrasco, R.; Horstmann, J. Video-based estimation of surface currents using a low-cost quadcopter. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2027–2031. [Google Scholar] [CrossRef] [Green Version]
- Holman, R.A.; Brodie, K.L.; Spore, N.J. Surf Zone Characterization Using a Small Quadcopter: Technical Issues and Procedures. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2017–2027. [Google Scholar] [CrossRef]
- Splinter, K.D.; Harley, M.D.; Turner, I.L. Remote sensing is changing our view of the coast: Insights from 40 years of monitoring at Narrabeen-Collaroy, Australia. Remote Sens. 2018, 10, 1744. [Google Scholar] [CrossRef] [Green Version]
- Andriolo, U.; Sánchez-García, E.; Taborda, R. Operational use of surfcam online streaming images for coastal morphodynamic studies. Remote Sens. 2019, 11, 78. [Google Scholar] [CrossRef] [Green Version]
- Young, I.R.; Rosenthal, W.; Ziemer, F. A three-dimensional analysis of marine radar images for the determination of ocean wave directionality and surface currents. J. Geophys. Res. Ocean. 1985, 90, 1049–1059. [Google Scholar] [CrossRef] [Green Version]
- Horstmann, J.; Stresser, M.; Carrasco, R. Surface currents retrieved from airborne video. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Thornton, E.B.; Guza, R. Energy saturation and phase speeds measured on a natural beach. J. Geophys. Res. Ocean. 1982, 87, 9499–9508. [Google Scholar] [CrossRef]
- Holland, K.; Puleo, J.; Kooney, T. Quantification of swash flows using video-based particle image velocimetry. Coast. Eng. 2001, 44, 65–77. [Google Scholar] [CrossRef]
- Puleo, J.A.; Farquharson, G.; Frasier, S.J.; Holland, K.T. Comparison of optical and radar measurements of surf and swash zone velocity fields. J. Geophys. Res. Ocean. 2003, 108. [Google Scholar] [CrossRef]
- Dérian, P.; Almar, R. Wavelet-Based Optical Flow Estimation of Instant Surface Currents From Shore-Based and UAV Videos. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5790–5797. [Google Scholar] [CrossRef]
- Anderson, D.; Bak, A.S.; Brodie, K.L.; Cohn, N.; Holman, R.A.; Stanley, J. Quantifying Optically Derived Two-Dimensional Wave-Averaged Currents in the Surf Zone. Remote Sens. 2021, 13, 690. [Google Scholar] [CrossRef]
- Adrian, R.J. Particle-Imaging Techniques for Experimental Fluid Mechanics. Annu. Rev. Fluid Mech. 1991, 23, 261–304. [Google Scholar] [CrossRef]
- Thielicke, W.; Stamhuis, E. PIVlab–towards user-friendly, affordable and accurate digital particle image velocimetry in MATLAB. J. Open Res. Softw. 2014, 2. [Google Scholar] [CrossRef] [Green Version]
- Cox, D.T.; Anderson, S.L. Statistics of intermittent surf zone turbulence and observations of large eddies using PIV. Coast. Eng. J. 2001, 43, 121–131. [Google Scholar] [CrossRef]
- Kimmoun, O.; Branger, H. A particle image velocimetry investigation on laboratory surf-zone breaking waves over a sloping beach. J. Fluid Mech. 2007, 588, 353. [Google Scholar] [CrossRef]
- Puleo, J.; Holland, K. Field observations of three-dimensional swash flow patterns and morphodynamics. In Proceedings of the 27th International Conference on Coastal Engineering, Sydney, Australia, 16–21 July 2000; pp. 637–650. [Google Scholar]
- Perkovic, D.; Lippmann, T.C.; Frasier, S.J. Longshore surface currents measured by Doppler radar and video PIV techniques. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2787–2800. [Google Scholar] [CrossRef]
- Wilson, G.; Özkan-Haller, H.; Holman, R.; Haller, M.; Honegger, D.; Chickadel, C. Surf zone bathymetry and circulation predictions via data assimilation of remote sensing observations. J. Geophys. Res. Ocean. 2014, 119, 1993–2016. [Google Scholar] [CrossRef] [Green Version]
- Wilson, G.; Berezhnoy, S. Surfzone state estimation, with applications to quadcopter-based remote sensing data. J. Atmos. Ocean. Technol. 2018, 35, 1881–1896. [Google Scholar] [CrossRef]
- Chapman, H.R.; O’Connor, H.; Starek, M.J.; Kar, D.C. A Framework for Determination of Ocean Wave Properties Using Unmanned Aerial Systems. In Proceedings of the International Conference on Scientific Computing (CSC), the Steering Committee of the World Congress in Computer Science, Shenyang, China, 8–11 August 2019; pp. 35–39. [Google Scholar]
- Horn, B.K.; Schunck, B.G. Determining optical flow. Techniques and Applications of Image Understanding. Int. Soc. Opt. Photonics 1981, 281, 319–331. [Google Scholar]
- Liu, T. OpenOpticalFlow: An open source program for extraction of velocity fields from flow visualization images. J. Open Res. Softw. 2017, 5. [Google Scholar] [CrossRef] [Green Version]
- Turaga, P.; Chellappa, R.; Veeraraghavan, A. Advances in Video-Based Human Activity Analysis: Challenges and Approaches. In Advances in Computers; Zelkowitz, M.V., Ed.; Elsevier: Amsterdam, The Netherlands, 2010; Volume 80, pp. 237–290. [Google Scholar] [CrossRef]
- Liu, T.; Wang, B.; Choi, D.S. Flow structures of Jupiter’s Great Red Spot extracted by using optical flow method. Phys. Fluids 2012, 24, 096601. [Google Scholar] [CrossRef]
- Liu, T.; Shen, L. Fluid flow and optical flow. J. Fluid Mech. 2008, 614, 253–291. [Google Scholar] [CrossRef]
- Liu, T.; Merat, A.; Makhmalbaf, M.; Fajardo, C.; Merati, P. Comparison between optical flow and cross-correlation methods for extraction of velocity fields from particle images. Exp. Fluids 2015, 56, 166. [Google Scholar] [CrossRef]
- Wang, B.; Cai, Z.; Shen, L.; Liu, T. An analysis of physics-based optical flow. J. Comput. Appl. Math. 2015, 276, 62–80. [Google Scholar] [CrossRef]
- Huguet, J.R.; Castelle, B.; Marieu, V.; Morichon, D.; de Santiago, I. Shoreline-Sandbar Dynamics at a High-Energy Embayed and Structurally-Engineered Sandy Beach: Anglet, SW France. J. Coast. Res. 2016, 75, 393–397. [Google Scholar] [CrossRef]
- Mouragues, A.; Bonneton, P.; Castelle, B.; Marieu, V.; Jak McCarroll, R.; Rodriguez-Padilla, I.; Scott, T.; Sous, D. High-Energy Surf Zone Currents and Headland Rips at a Geologically Constrained Mesotidal Beach. J. Geophys. Res. Ocean. 2020, 125, e2020JC016259. [Google Scholar] [CrossRef]
- Birrien, F.; Castelle, B.; Dailloux, D.; Marieu, V.; Rihouey, D.; Price, T. Video observation of megacusp evolution along a high-energy engineered sandy beach: Anglet, SW France. J. Coast. Res. 2013, 65, 1727–1732. [Google Scholar] [CrossRef]
- Abadie, S.; Butel, R.; Dupuis, H.; Brière, C. Paramètres statistiques de la houle au large de la côte sud-aquitaine. C. R. Geosci. 2005, 337, 769–776. [Google Scholar] [CrossRef]
- Rodriguez-Padilla, I.; Castelle, B.; Marieu, V.; Morichon, D. A Simple and Efficient Image Stabilization Method for Coastal Monitoring Video Systems. Remote Sens. 2020, 12, 70. [Google Scholar] [CrossRef] [Green Version]
- Sous, D.; Castelle, B.; Mouragues, A.; Bonneton, P. Field measurements of a high-energy headland deflection rip current: Tidal modulation, very low frequency pulsation and vertical structure. J. Mar. Sci. Eng. 2020, 8, 534. [Google Scholar] [CrossRef]
- Mouragues, A.; Bonneton, P.; Castelle, B.; Marieu, V.; Barrett, A.; Bonneton, N.; Detand, G.; Martins, K.; McCarroll, J.; Morichon, D.; et al. Field Observations of Wave-induced Headland Rips. J. Coast. Res. 2020, 95, 578–582. [Google Scholar] [CrossRef]
- Wright, L.; Short, A. Morphodynamic variability of surf zones and beaches: A synthesis. Mar. Geol. 1984, 56, 93–118. [Google Scholar] [CrossRef]
- Bonneton, P.; Lannes, D.; Martins, K.; Michallet, H. A nonlinear weakly dispersive method for recovering the elevation of irrotational surface waves from pressure measurements. Coast. Eng. 2018, 138, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Mouragues, A.; Bonneton, P.; Lannes, D.; Castelle, B.; Marieu, V. Field data-based evaluation of methods for recovering surface wave elevation from pressure measurements. Coast. Eng. 2019, 150, 147–159. [Google Scholar] [CrossRef] [Green Version]
- Martins, K.; Bonneton, P.; Mouragues, A.; Castelle, B. Non-hydrostatic, Non-linear Processes in the Surf Zone. J. Geophys. Res. Ocean. 2020, 125, e2019JC015521. [Google Scholar] [CrossRef]
- Giddings, S.N.; Monismith, S.G.; Fong, D.A.; Stacey, M.T. Using depth-normalized coordinates to examine mass transport residual circulation in estuaries with large tidal amplitude relative to the mean depth. J. Phys. Oceanogr. 2014, 44, 128–148. [Google Scholar] [CrossRef]
- Cheng, P. On residual velocities in sigma coordinates in narrow tidal channels. Acta Oceanol. Sin. 2020, 39, 1–10. [Google Scholar] [CrossRef]
- Schmidt, W.E.; Woodward, B.T.; Millikan, K.S.; Guza, R.T.; Raubenheimer, B.; Elgar, S. A GPS-Tracked Surf Zone Drifter. J. Atmos. Ocean. Technol. 2003, 20, 1069–1075. [Google Scholar] [CrossRef]
- MacMahan, J.; Brown, J.; Thornton, E. Low-Cost Handheld Global Positioning System for Measuring Surf-Zone Currents. J. Coast. Res. 2009, 2009, 744–754. [Google Scholar] [CrossRef]
- Austin, M.J.; Scott, T.M.; Russell, P.E.; Masselink, G. Rip current prediction: Development, validation, and evaluation of an operational tool. J. Coast. Res. 2013, 29, 283–300. [Google Scholar]
- McCarroll, R.J.; Brander, R.W.; Turner, I.L.; Power, H.E.; Mortlock, T.R. Lagrangian observations of circulation on an embayed beach with headland rip currents. Mar. Geol. 2014, 355, 173–188. [Google Scholar] [CrossRef]
- Scott, T.; Austin, M.; Masselink, G.; Russell, P. Dynamics of rip currents associated with groynes — field measurements, modelling and implications for beach safety. Coast. Eng. 2016, 107, 53–69. [Google Scholar] [CrossRef] [Green Version]
- Murray, S.P. Trajectories and Speeds of Wind-Driven Currents Wear the Coast. J. Phys. Oceanogr. 1975, 5, 347–360. [Google Scholar] [CrossRef] [Green Version]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Aziz, Y.; Karara, H. Direct linear transformation from comparator co-ordinates into object space co-ordinates. In Proceedings of the ASP/UI Symposium on Close-Range Photogrammetry, Urbana, IL, USA, 26–29 January 1971. [Google Scholar]
- Bergsma, E.; Conley, D.; Davidson, M.; O’Hare, T. Video-based nearshore bathymetry estimation in macro-tidal environments. Mar. Geol. 2016, 374, 31–41. [Google Scholar] [CrossRef] [Green Version]
- Holland, K.T.; Holman, R.A.; Lippmann, T.C.; Stanley, J.; Plant, N. Practical use of video imagery in nearshore oceanographic field studies. IEEE J. Ocean. Eng. 1997, 22, 81–92. [Google Scholar] [CrossRef]
- Philip, S.; Pang, A. Detecting and Visualizing Rip Current Using Optical Flow; EuroVis: Groningen, The Netherlands, 2016; pp. 19–23. [Google Scholar]
- Castelle, B.; Almar, R.; Dorel, M.; Lefebvre, J.P.; Sénéchal, N.; Anthony, E.J.; Laibi, R.; Chuchla, R.; Penhoat, Y.D. Rip currents and circulation on a high-energy low-tide-terraced beach (Grand Popo, Benin, West Africa). J. Coast. Res. 2014, 70, 633–638. [Google Scholar] [CrossRef]
- Scott, T.; Castelle, B.; Almar, R.; Senechal, N.; Floc’h, F.; Detandt, G. Controls on flash rip current hazard on low-tide terraced tropical beaches in West Africa. J. Coast. Res. 2018, 81, 92–99. [Google Scholar]
- Bouvier, C.; Balouin, Y.; Castelle, B.; Holman, R. Modelling camera viewing angle deviation to improve nearshore video monitoring. Coast. Eng. 2019, 147, 99–106. [Google Scholar] [CrossRef]











| 18 October 2018 | 19 October 2018 | 22 October 2018 | 23 October 2018 | ||
|---|---|---|---|---|---|
| Time [GMT] | 11:52 to 13:57 | 07:26 to 10:28 | 07:42 to 10:34 | 08:02 to 08:35 | 08:36 to 11:38 |
| Configuration | Shore-normal | Shadowed | Shore-normal | Deflection | Deflection |
| Drifter Deployments | 16 | 28 | 46 | 5 | 30 |
| [m] | 1.9 | 1.6 | 1 | 1.7 | 1.6 |
| [s] | 14 | 13 | 11 | 13 | 11 |
| [°] | 0 | −5 | 0 | 4 | 8 |
| Wind Speed [m/s] | 2.4 | 1.1 | 3.6 | 0.6 | 1.7 |
| Wind Direction [°] | 10 | −50 | 30 | −180 | 140 |
| Tide Stage | Ebb | Flood | Flood | Ebb | Flood |
| Water Level Range [m] | 0.66 to 0.08 | −0.42 to 0.58 | −1.49 to −0.46 | −1.70 to −1.74 | −1.75 to −0.13 |
| ADCP vs. OF ( Hz) | RMSE [m/s] | Bias [m/s] | Slope | # Points (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| thVelocity Component | thLong. | thCross. | thLong. | thCross. | thLong. | thCross. | thLong. | thCross. | thLong. | thCross. |
| m | - | - | - | - | - | - | - | - | 0 (0%) | |
| m | 0.02 | 0.49 | 0.14 | 0.27 | 0.06 | −0.26 | 0.45 | 1.52 | 3482 (3%) | |
| m | 0.31 | 0.69 | 0.12 | 0.19 | −0.01 | −0.16 | 0.69 | 1.38 | 26,879 (20%) | |
| m | 0.63 | 0.74 | 0.16 | 0.17 | −0.13 | −0.13 | 1.16 | 1.35 | 60,416 (44%) | |
| m | 0.67 | 0.68 | 0.16 | 0.24 | −0.13 | −0.20 | 1.28 | 1.24 | 25,920 (19%) | |
| m | 0.41 | 0.13 | 0.08 | 0.23 | −0.01 | −0.21 | 1.02 | 0.33 | 12,658 (9%) | |
| m | 0.69 | 0.59 | 0.07 | 0.27 | −0.03 | −0.27 | 1.29 | 0.59 | 7338 (5%) | |
| m | 0.50 | 0.70 | 0.15 | 0.21 | −0.09 | −0.17 | 1.00 | 1.13 | 136,693 (100%) | |
| ADCP vs. OF ( Hz) | RMSE [m/s] | Bias [m/s] | Slope | # Points (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Velocity Component | Long. | Cross. | Long. | Cross. | Long. | Cross. | Long. | Cross. | Long. | Cross. |
| m | - | - | - | - | - | - | - | - | 0 (0%) | |
| m | 0.07 | 0.38 | 0.18 | 0.27 | 0.13 | −0.26 | 1.15 | 1.72 | 3482 (3%) | |
| m | 0.35 | 0.44 | 0.15 | 0.20 | 0.09 | −0.12 | 1.37 | 2.93 | 26,879 (20%) | |
| m | 0.45 | 0.48 | 0.13 | 0.18 | −0.02 | 0 | 1.73 | 2.35 | 60,416 (44%) | |
| m | 0.52 | 0.61 | 0.14 | 0.24 | −0.05 | −0.16 | 2.00 | 2.33 | 25,920 (19%) | |
| m | 0.06 | 0.01 | 0.10 | 0.11 | 0.03 | 0.08 | 0.72 | 0.20 | 12,658 (9%) | |
| m | 0.58 | 0.02 | 0.08 | 0.07 | −0.01 | 0.02 | 2.17 | 0.21 | 7338 (5%) | |
| m | 0.47 | 0.52 | 0.13 | 0.19 | 0.01 | −0.05 | 1.82 | 2.45 | 136,693 (100%) | |
| Optical Flow-Based Methods | Dérian and Almar (2017) [21] | Anderson et al. (2021) [22] | Present Study | |||
|---|---|---|---|---|---|---|
| Typhoon | OpenCV | OpenOpticalFlow | ||||
| [Hz] | 2 | 2 | 1 | |||
| Image filtering approach | High-pass median filter | Moving-average | Low-pass filter | |||
| Study site | Grand Popo Beach, Benin | Duck, USA | PCA Beach, France | |||
| range [m] | 1.2–1.6 | 0.9–1.6 | 0.8–3.3 | |||
| range [s] | 10–12 | 8–12 | 7–15 | |||
| Water level range [m] | 0.3 to 1.2 | −0.14 to 0.90 | 1.5 to 5.9 | |||
| Wind speed range [m/s] | - | 3.3–7.4 | 0–12 | |||
| In situ validation | ADV | Drifters | ADCP | |||
| Nearshore region | Swash/Surf zone | Surf zone | Surf zone | |||
| Velocity component | Longshore | Cross-shore | Longshore | Cross-shore | Longshore | Cross-shore |
| Number of points | 8130 | 8130 | >90 | >90 | 136,992 | 136,992 |
| range | 0.13–0.29 | 0.05–0.58 | - | - | 0.35–0.51 | 0.51–0.80 |
| RMSE range [m/s] | 0.22–0.65 | 0.12–0.58 | 0.15 | 0.13 | 0.12–0.17 | 0.19–0.24 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Padilla, I.; Castelle, B.; Marieu, V.; Bonneton, P.; Mouragues, A.; Martins, K.; Morichon, D. Wave-Filtered Surf Zone Circulation under High-Energy Waves Derived from Video-Based Optical Systems. Remote Sens. 2021, 13, 1874. https://doi.org/10.3390/rs13101874
Rodríguez-Padilla I, Castelle B, Marieu V, Bonneton P, Mouragues A, Martins K, Morichon D. Wave-Filtered Surf Zone Circulation under High-Energy Waves Derived from Video-Based Optical Systems. Remote Sensing. 2021; 13(10):1874. https://doi.org/10.3390/rs13101874
Chicago/Turabian StyleRodríguez-Padilla, Isaac, Bruno Castelle, Vincent Marieu, Philippe Bonneton, Arthur Mouragues, Kevin Martins, and Denis Morichon. 2021. "Wave-Filtered Surf Zone Circulation under High-Energy Waves Derived from Video-Based Optical Systems" Remote Sensing 13, no. 10: 1874. https://doi.org/10.3390/rs13101874
APA StyleRodríguez-Padilla, I., Castelle, B., Marieu, V., Bonneton, P., Mouragues, A., Martins, K., & Morichon, D. (2021). Wave-Filtered Surf Zone Circulation under High-Energy Waves Derived from Video-Based Optical Systems. Remote Sensing, 13(10), 1874. https://doi.org/10.3390/rs13101874