
Squint Model InISAR Imaging Method Based on Reference Interferometric Phase Construction and Coordinate Transformation


Abstract
:1. Introduction
2. Principle of 3D InISAR Imaging
2.1. Normal Model
2.2. Squint Model
3. InISAR Imaging Based on Reference InPhas Construction
3.1. Reference InPhas Construction
3.2. InPhas Restoration
3.3. 3D Coordinates Estimation
4. Simulation Results
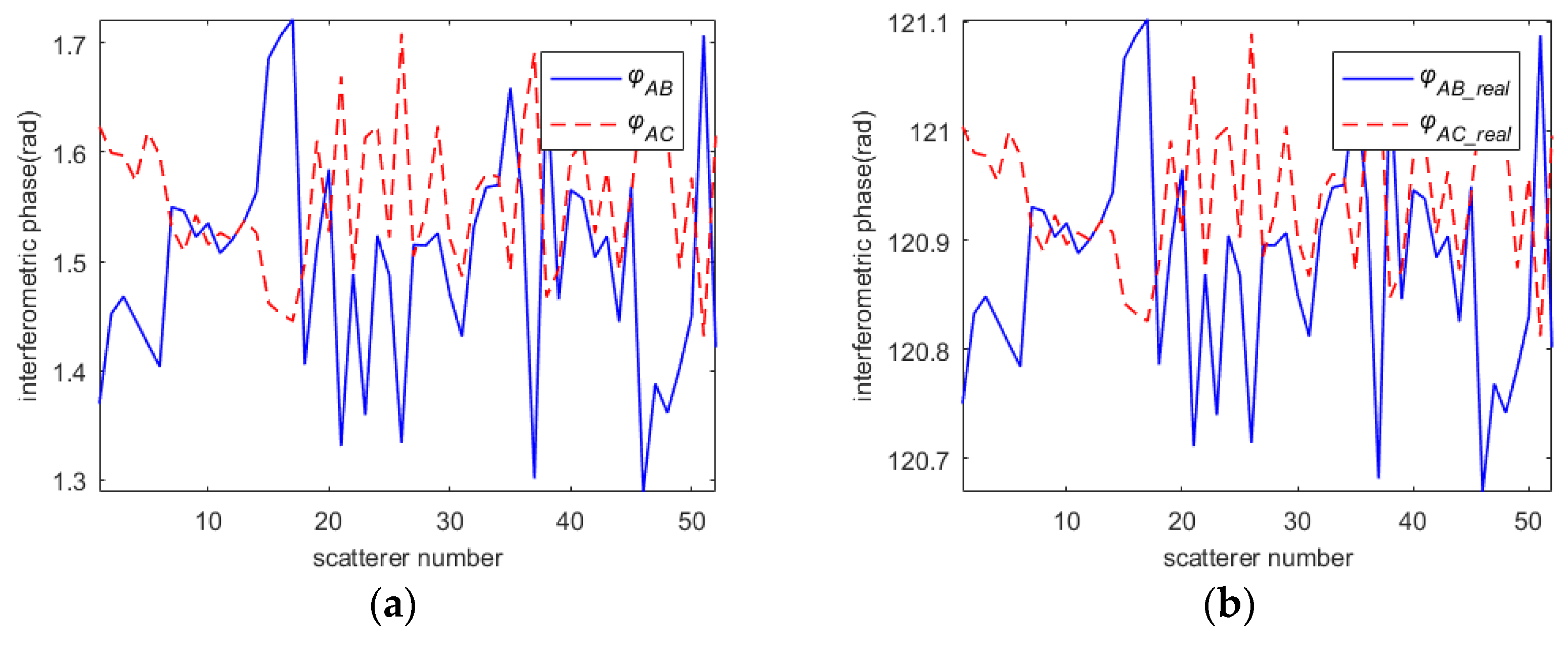
4.1. Reference InPhas Construction
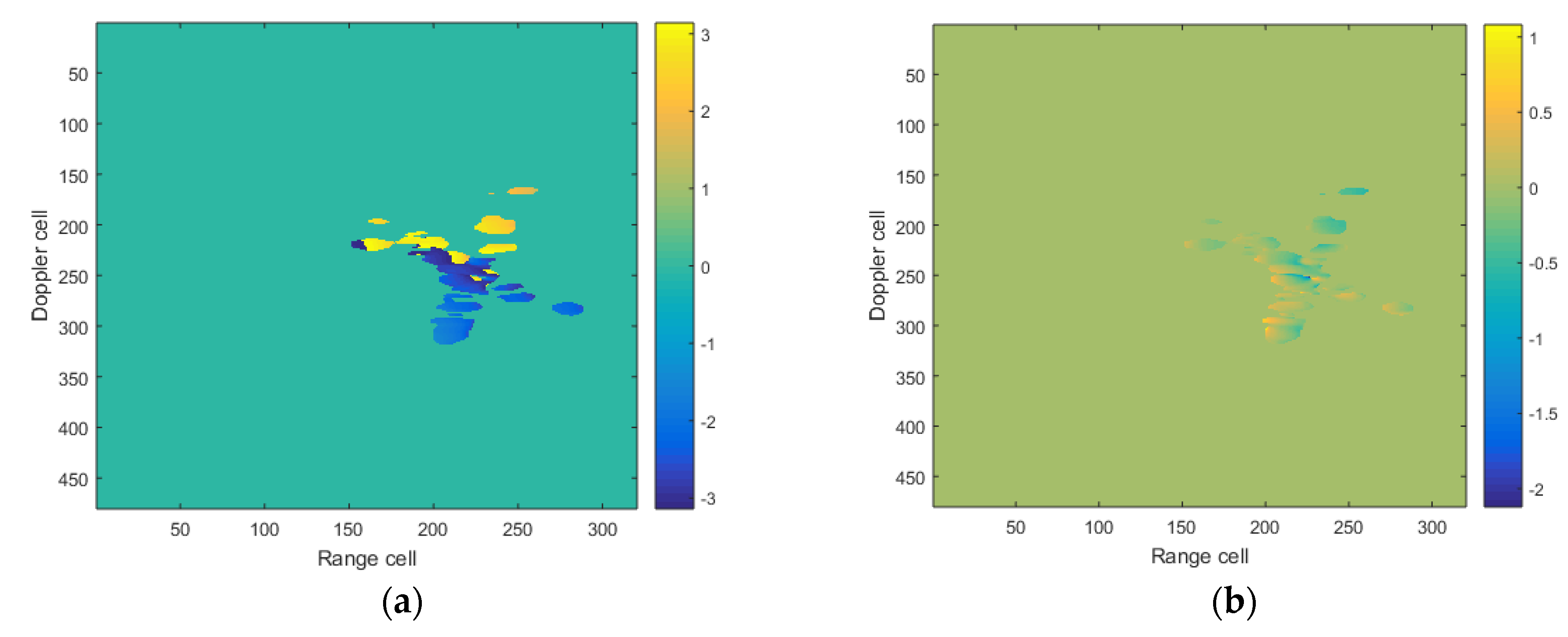
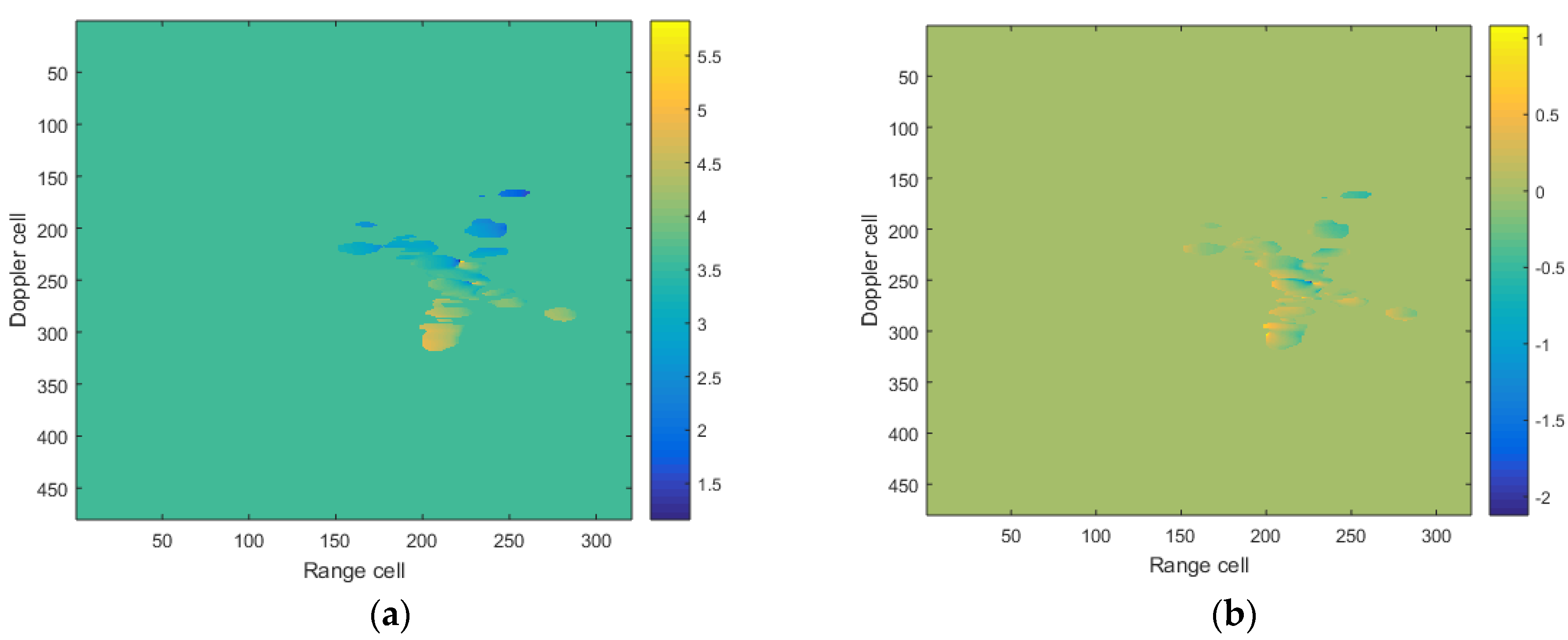
4.2. InPhas Restoration
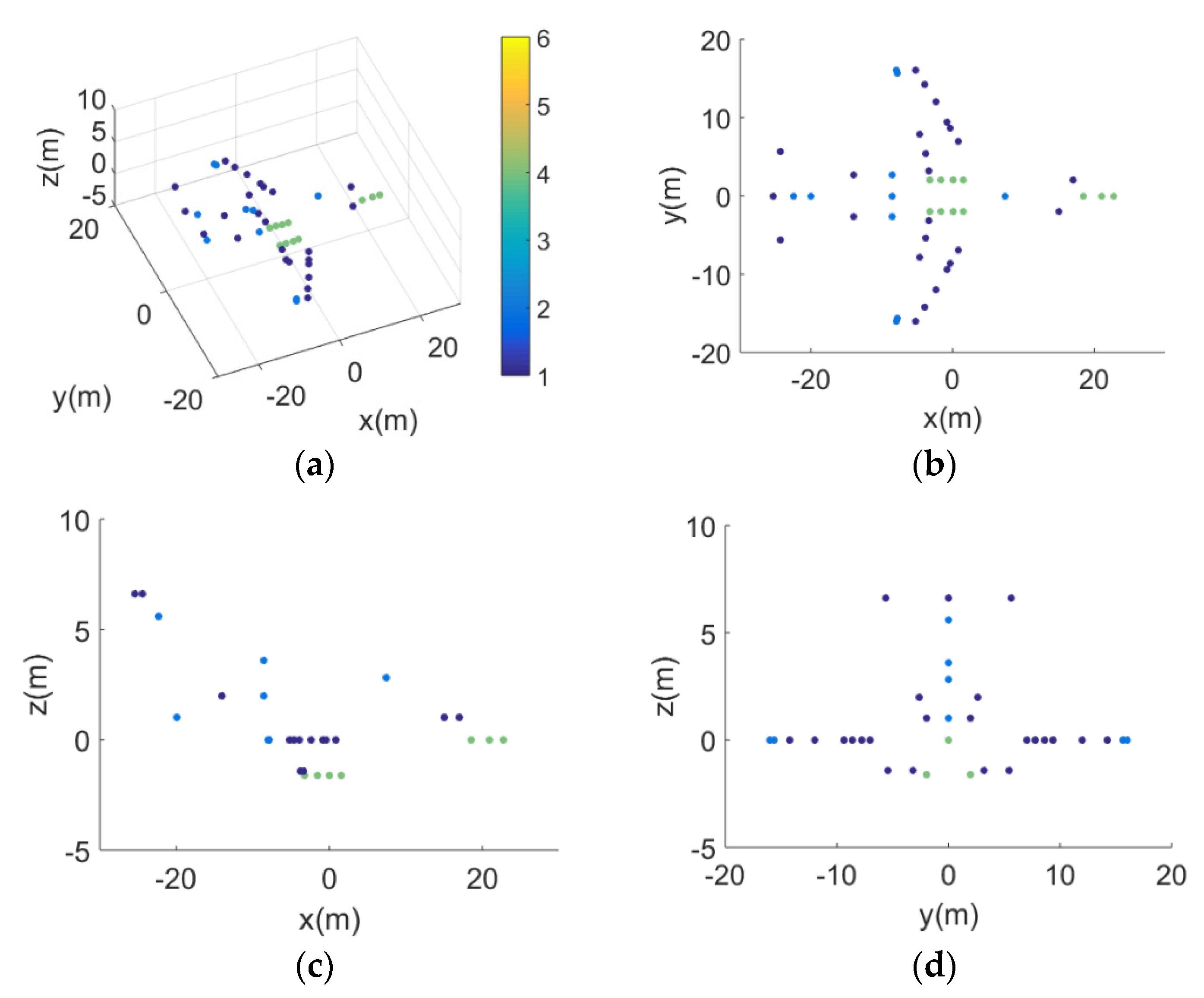
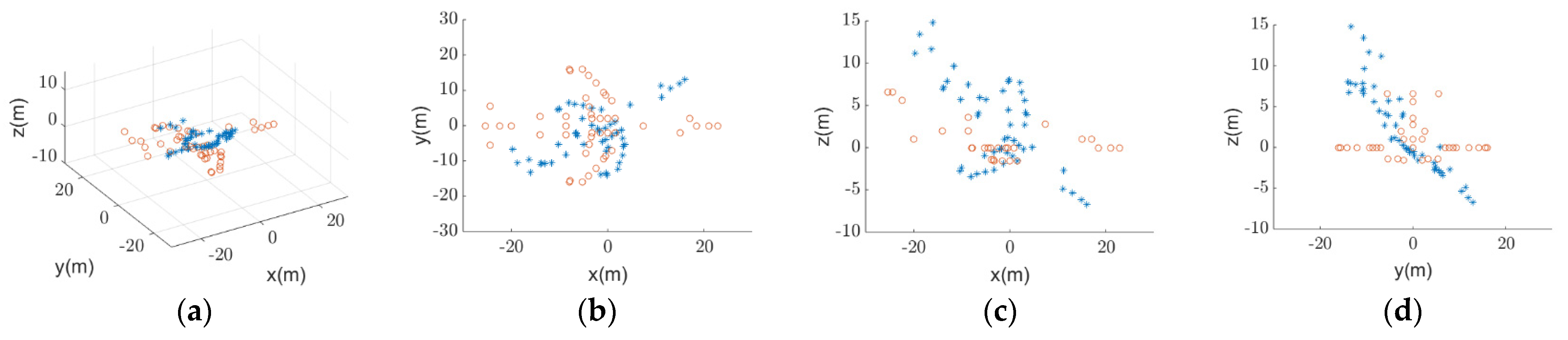
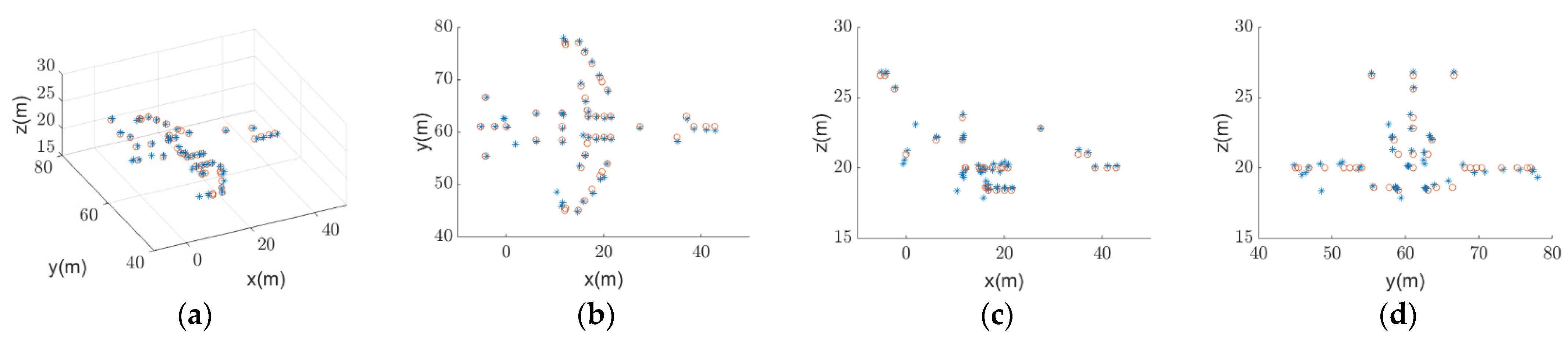
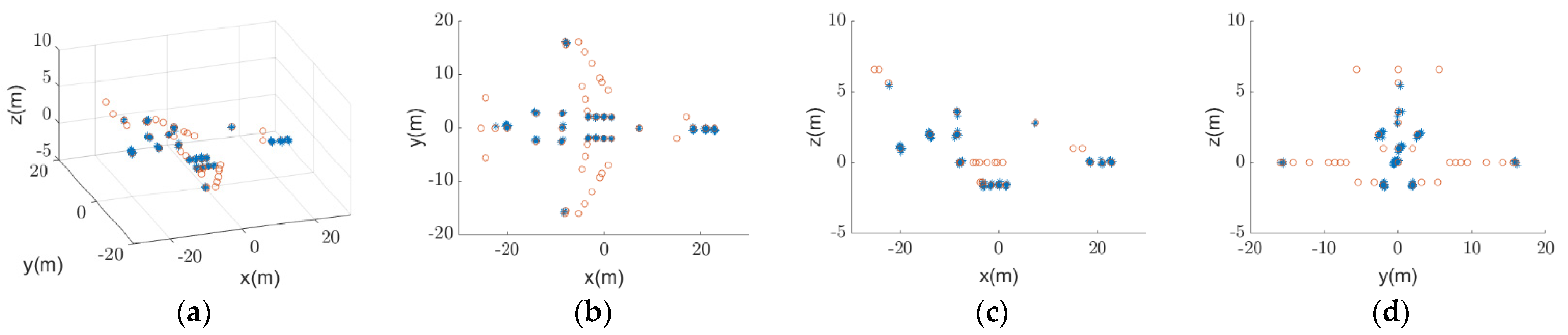
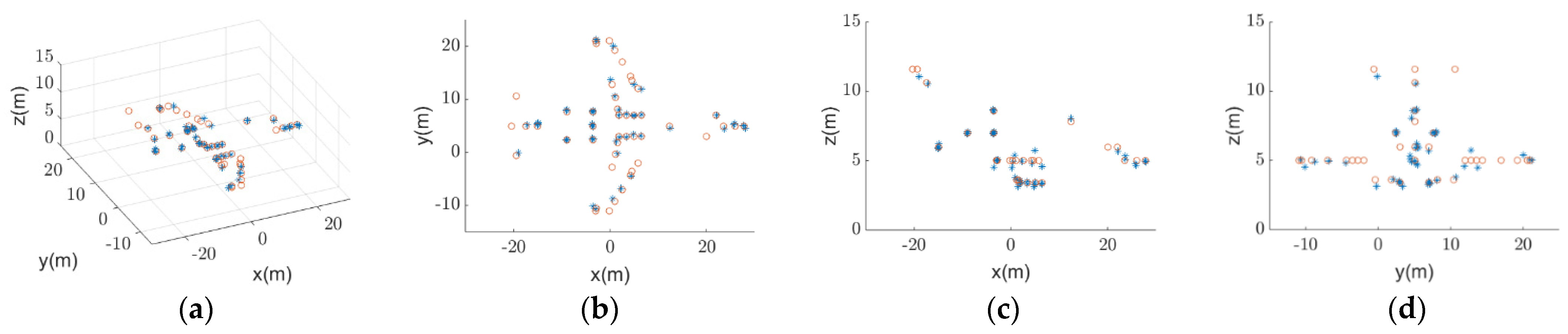
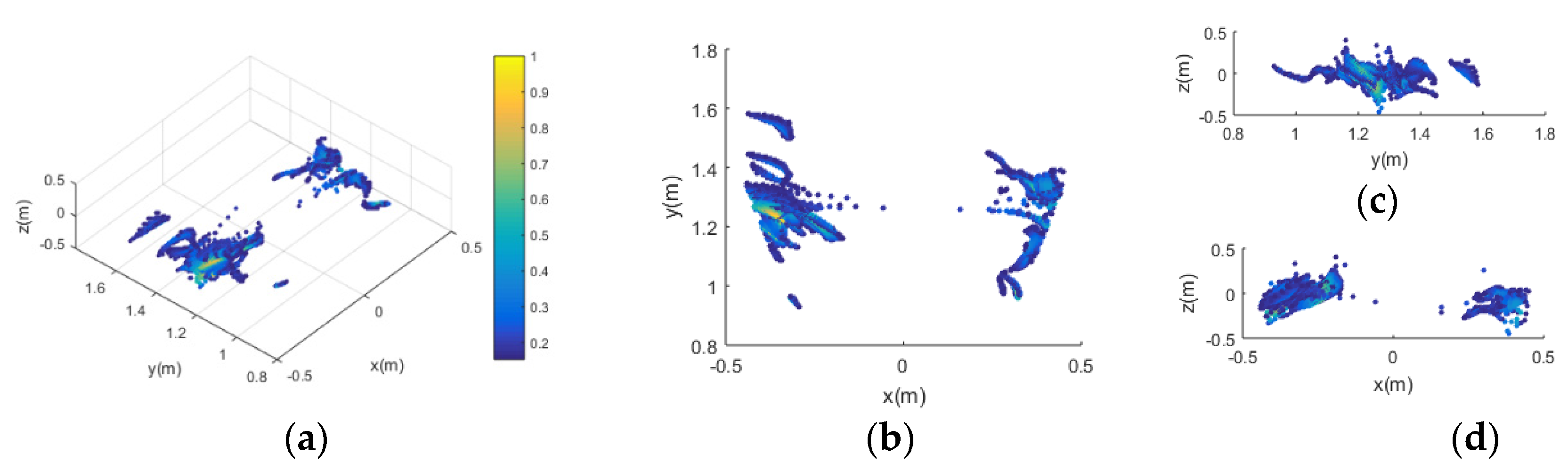
4.3. 3D Coordinates Estimation
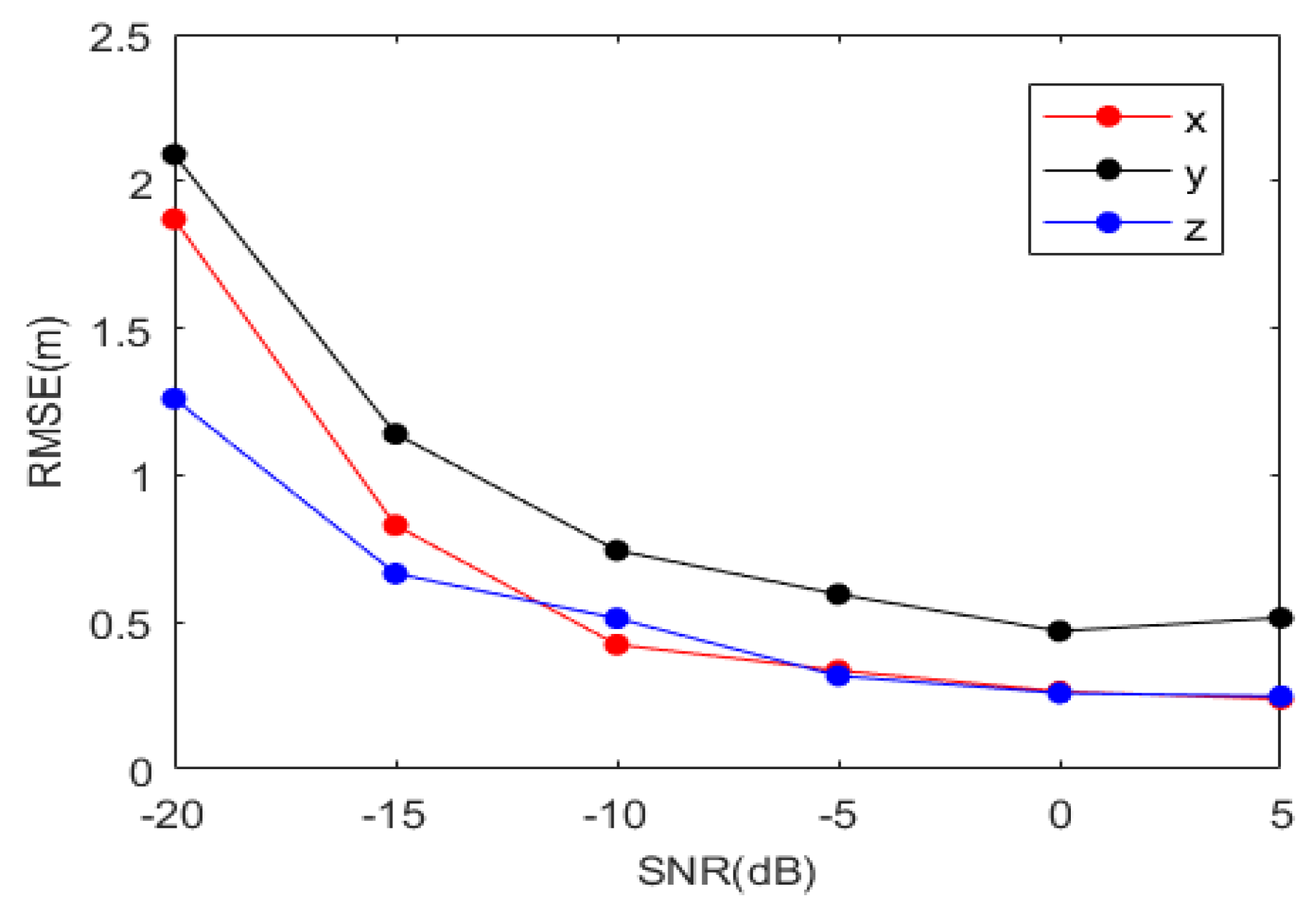
4.4. Robustness of the Proposed Method
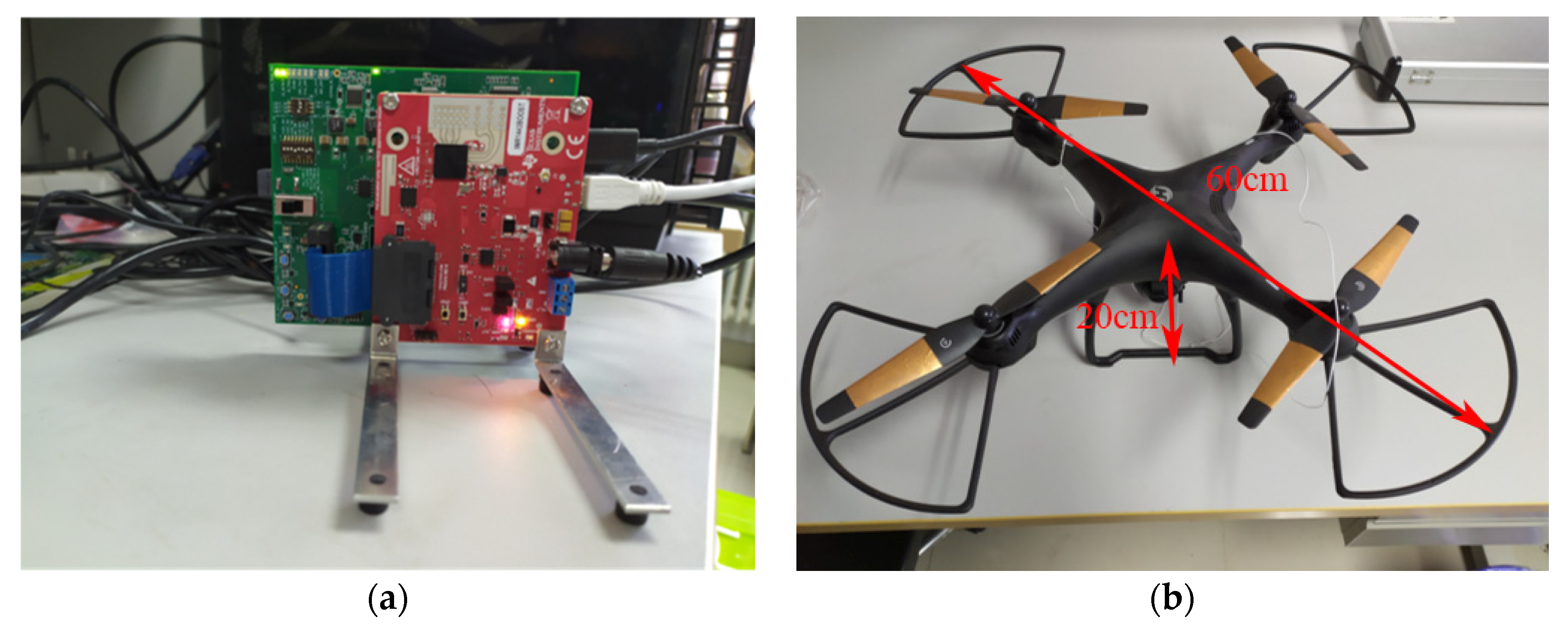
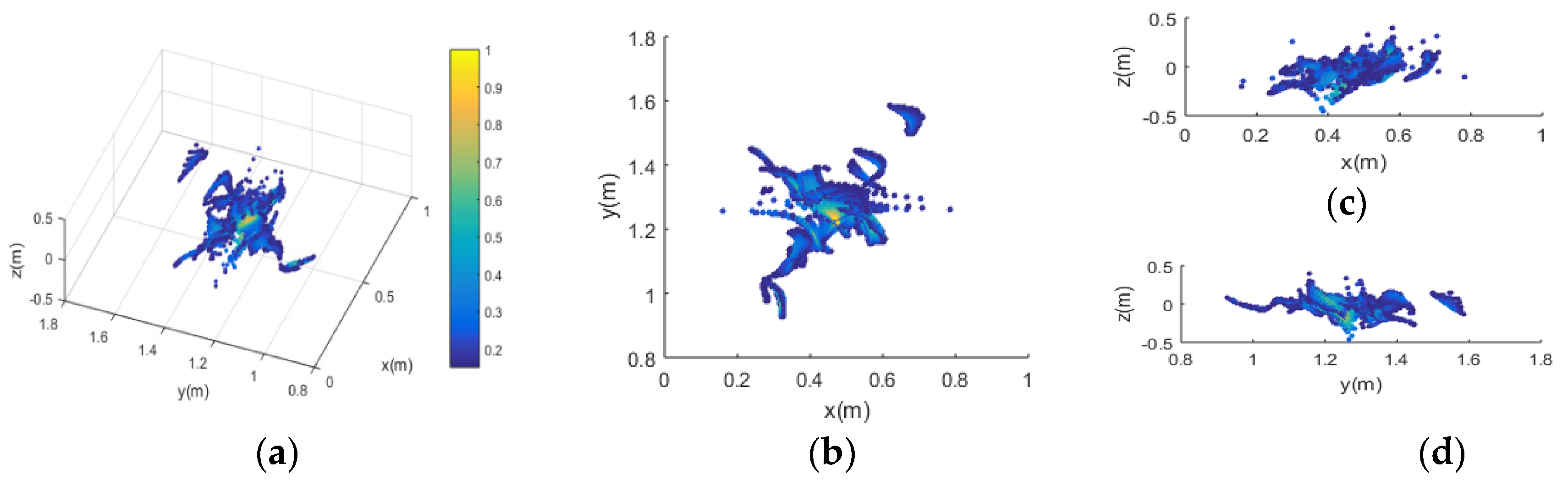
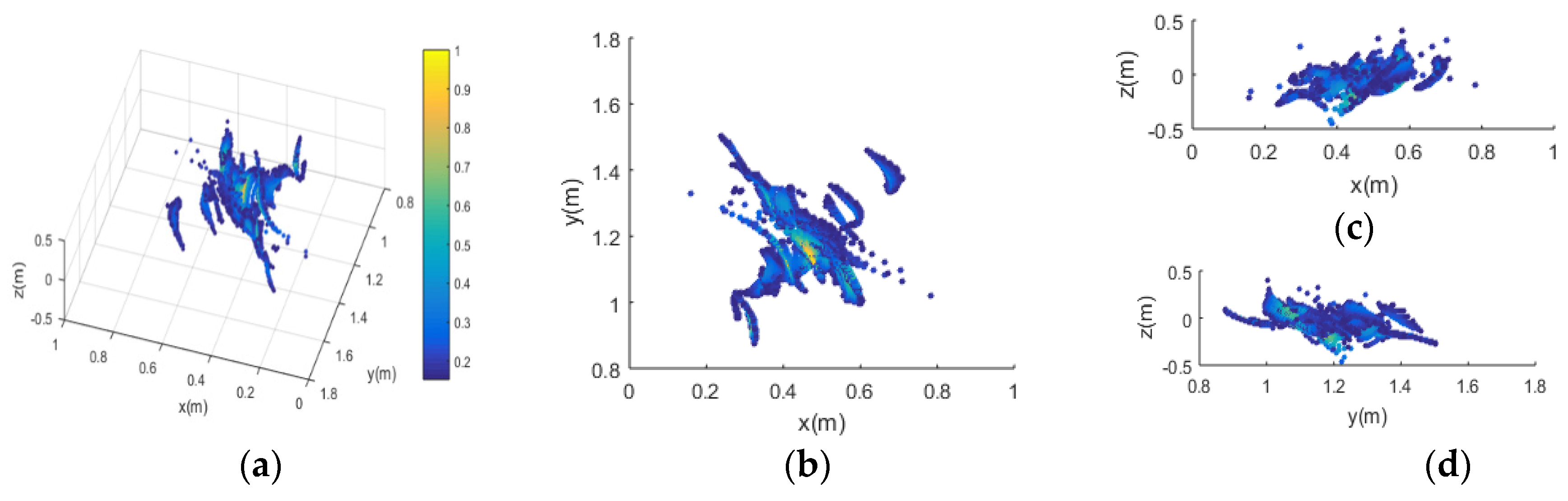
5. Experiment Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, C.C.; Andrews, H.C. Target-Motion-Induced Radar Imaging. IEEE Trans. Aerosp. Electron. Syst. 1980, 16, 2–14. [Google Scholar] [CrossRef]
- Walker, J.L. Range-Doppler Imaging of Rotating Objects. IEEE Trans. Aerosp. Electron. Syst. 1980, 16, 23–52. [Google Scholar] [CrossRef]
- Chen, V.C.; Martorella, M. Inverse Synthetic Aperture Radar Imaging: Principles, Algorithms and Applications; John Wiley & Sons. Inc: Hoboken, NJ, USA, 2014; pp. 121–168. [Google Scholar]
- Xu, X.; Narayanan, R.M. Enhanced resolution in SAR/ISAR imaging using iterative sidelobe apodization. IEEE Trans. Image Process. 2005, 14, 537–547. [Google Scholar] [PubMed]
- Zhang, J.; Liao, G.; Zhu, S.; Xu, J.; Huo, L.; Yang, J. An Efficient ISAR Imaging Method for Non-Uniformly Rotating Targets Based on Multiple Geometry-Aided Parameters Estimation. IEEE Sens. J. 2018, 19, 2191–2204. [Google Scholar] [CrossRef]
- Gao, Y.; Xing, M.; Zhang, Z.; Liang, G. ISAR Imaging and Cross-Range Scaling for Maneuvering Targets by Using the NCS-NLS Algorithm. IEEE Sens. J. 2019, 19, 4889–4897. [Google Scholar] [CrossRef]
- Xu, G.; Xing, M.; Xia, X.-G.; Zhang, L.; Chen, Q.; Bao, Z. 3D Geometry and Motion Estimations of Maneuvering Targets for Interferometric ISAR With Sparse Aperture. IEEE Trans. Image Process. 2016, 25, 2005–2020. [Google Scholar] [CrossRef]
- Zhao, L.; Gao, M.; Martorella, M.; Stagliano, D. Bistatic three-dimensional interferometric ISAR image reconstruction. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 951–961. [Google Scholar] [CrossRef]
- Yong, W.; Li, X. Three-Dimensional Interferometric ISAR Imaging for the Ship Target Under the Bi-Static Configuration. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1–16. [Google Scholar]
- Felguera-Martín, D.; González-Partida, J.-T.; Almorox-González, P.; Burgos-García, M. Interferometric inverse synthetic aperture radar experiment using an interferometric linear frequency modulated continuous wave millimetre-wave radar. Iet Radar Sonar Navig. 2011, 5, 39–47. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Pan, Z.-H.; Li, D.-J.; Qiao, M. Moving target detection and location based on millimeter-wave InISAR imaging. J. Infrared Millim. Waves 2012, 31, 258–264. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, X.; Cao, R. Novel Method of ISAR Cross-Range Scaling for Slowly Rotating Targets Based on the Iterative Adaptive Approach and Discrete Polynomial-Phase Transform. IEEE Sens. J. 2019, 19, 4898–4906. [Google Scholar] [CrossRef]
- Given, J.A.; Schmidt, W.R. Generalized ISAR—Part II: Interferometric techniques for three-dimensional location of scatterers. IEEE Trans. Image Process. 2005, 14, 1792–1797. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Xia, X.G.; Chen, V.C. Three-dimensional ISAR imaging of maneuvering targets using three receivers. IEEE Trans. Image Process. 2002, 10, 436–447. [Google Scholar] [CrossRef]
- Xu, X.; Narayanan, R.M. Three-dimensional interferometric ISAR imaging for target scattering diagnosis and modeling. IEEE Trans. Image Process. 2001, 10, 1094–1102. [Google Scholar] [PubMed]
- Zhang, Q.; Yeo, T.S. Three-dimensional SAR imaging of a ground moving target using the InISAR technique. IEEE Trans. Geosci. Remote. Sens. 2004, 42, 1818–1828. [Google Scholar] [CrossRef]
- Zhang, Q.; Yeo, T.S.; Gan, D.; Zhang, S. Estimation of Three-Dimensional Motion Parameters in Interferometric ISAR Imaging. IEEE Trans. Geosci. Remote Sens. 2004, 42, 292–300. [Google Scholar] [CrossRef]
- Battisti, N.; Martorella, M. Intereferometric phase and target motion estimation for accurate 3D reflectivity reconstruction in ISAR systems. In Proceedings of the 2010 IEEE Radar Conference, Arlington, VA, USA, 10–14 May 2010. [Google Scholar]
- Martorella, M.; Stagliano, D.; Salvetti, F.; Battisti, N. 3D interferometric ISAR imaging of noncooperative targets. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3102–3114. [Google Scholar] [CrossRef]
- Bao, Z.; Xing, M.; Wang, T. Radar Imaging Technology; Publishing House of Electronics Industry: Beijing, China, 2004; pp. 277–326. [Google Scholar]
- Tian, B.; Lu, Z.; Liu, Y.; Li, X. Review on Interferometric ISAR 3D Imaging: Concept, Technology and Experiment. Signal Process. 2018, 153, 164–187. [Google Scholar] [CrossRef]
- Ma, C.Z.; Yeo, T.S.; Tan, H.S.; Lu, G. Interferometric ISAR imaging on squint model. Prog. Electromagn. Res. Lett. 2008, 2, 125–133. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Liu, H.; Jiu, B. An interferometric inverse synthetic aperture radar imaging algorithms for squint model. Xi’an Jiaotong Univ. 2008, 42, 1290–1294. [Google Scholar]
- Liu, C.L.; Feng, H.E.; Gao, X.Z.; Xiang, L.I.; Shen, R.J. Squint-mode InISAR imaging based on nonlinear least square and coordinates transform. Sci. China Technol. Sci. 2011, 054, 3332–3340. [Google Scholar] [CrossRef]
- Tian, B.; Zou, J.; Xu, S.; Chen, Z. Squint model interferometric ISAR imaging based on respective reference range selection and squint iteration improvement. IET Radar Sonar Navig. Iet 2015, 9, 1366–1375. [Google Scholar] [CrossRef]
- Yuan, Z.; Wang, J.; Zhao, L.; Xiong, D.; Gao, M. Phase Unwrapping for Bistatic InISAR Imaging of Space Targets. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1794–1805. [Google Scholar] [CrossRef]
- Bose, R.; Fr Ee Dman, A.; Steinberg, B.D. Sequence CLEAN: A modified deconvolution technique for microwave images of contiguous targets. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 89–97. [Google Scholar] [CrossRef]
- Johnson, J.; Gupta, I.; Burkholder, R. Comparison of Monostatic and Bistatic Radar Images. IEEE Antenna Propag. Mag. 2003, 45, 41–50. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Carrier frequency | 10 GHz |
| Bandwidth | 500 MHz |
| PRF | 500 Hz |
| Location of antenna A | (0,0,0) |
| Location of antenna B | (1,0,0) m |
| Location of antenna C | (0,0,1) m |
| Target velocity | 50 m/s |
| Roll/pitch/yaw | 0/0/0.03 rad/s |
| SNR | 10 dB |
| Target location | (10,10,10) km |
| θ | 45 deg |
| φ | 45 deg |
| Image Entropy | Image Contrast | |
|---|---|---|
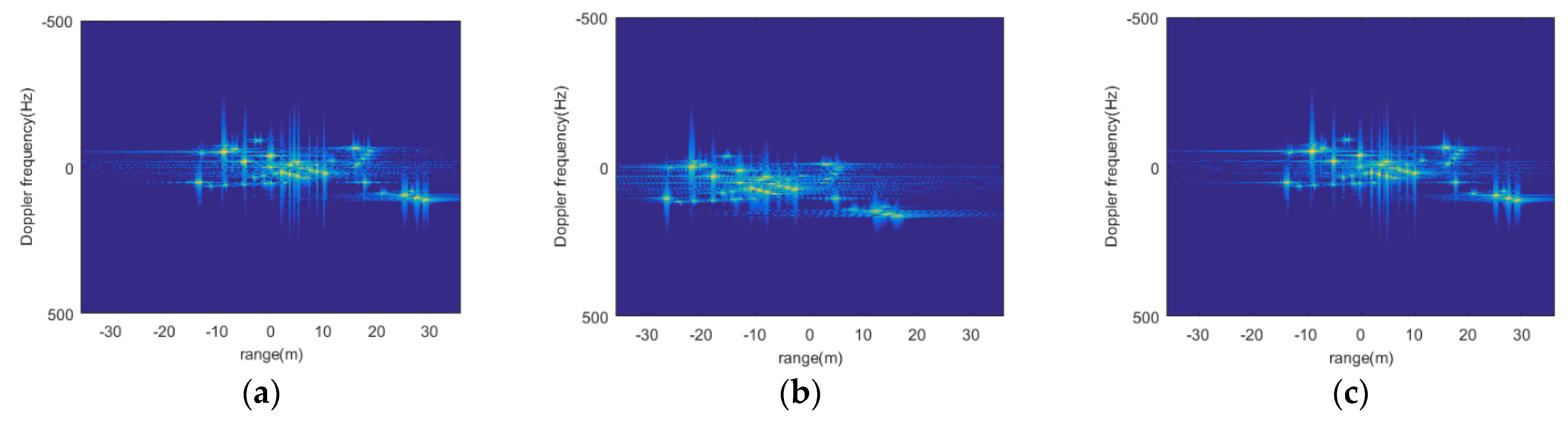
| Figure 6a | 3.95 | 7.48 |
| Figure 6b | 4.08 | 6.01 |
| Figure 6c | 4.05 | 6.39 |
| Method | RMSE of x | RMSE of y | RMSE of z | Runtime |
|---|---|---|---|---|
| Our method | 0.2063 | 0.3389 | 0.1914 | 0.01 s |
| Ref. [25] | 0.2125 | 0.3734 | 0.2195 | 0.26 s |
| Parameters | Value |
|---|---|
| Carrier frequency | 77 GHz |
| Chirp rate | 39.976 MHz |
| Pulse width | 100 μs |
| PRF | 200 Hz |
| Rotational velocity | 0.2618 rad/s |
| Imaging time | 0.6 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhang, Y.; Dong, X. Squint Model InISAR Imaging Method Based on Reference Interferometric Phase Construction and Coordinate Transformation. Remote Sens. 2021, 13, 2224. https://doi.org/10.3390/rs13112224
Li Y, Zhang Y, Dong X. Squint Model InISAR Imaging Method Based on Reference Interferometric Phase Construction and Coordinate Transformation. Remote Sensing. 2021; 13(11):2224. https://doi.org/10.3390/rs13112224
Chicago/Turabian StyleLi, Yu, Yunhua Zhang, and Xiao Dong. 2021. "Squint Model InISAR Imaging Method Based on Reference Interferometric Phase Construction and Coordinate Transformation" Remote Sensing 13, no. 11: 2224. https://doi.org/10.3390/rs13112224
APA StyleLi, Y., Zhang, Y., & Dong, X. (2021). Squint Model InISAR Imaging Method Based on Reference Interferometric Phase Construction and Coordinate Transformation. Remote Sensing, 13(11), 2224. https://doi.org/10.3390/rs13112224