
Applications of a CloudSat-TRMM and CloudSat-GPM Satellite Coincidence Dataset

 , , ,
, , ,  , , , , and
, , , , and
Abstract
:
1. Introduction
2. Dataset Preparation
2.1. CloudSat Sampling and Resolution Segments
2.2. Full-Swath Segments
2.3. Passive Microwave Sounder Data from NOAA-18 MHS and NPP-ATMS
3. Applications to Cold-Season Precipitation
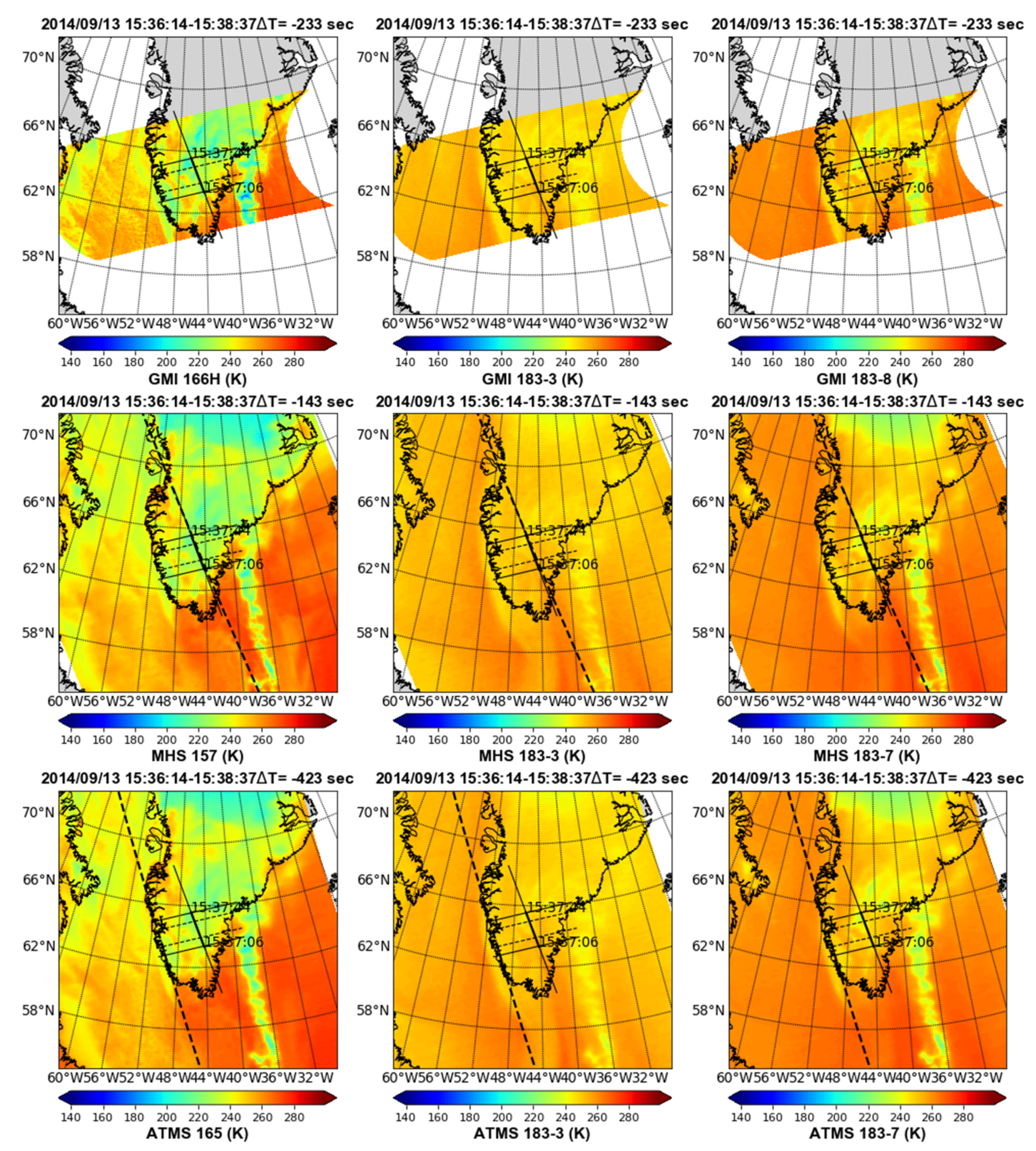
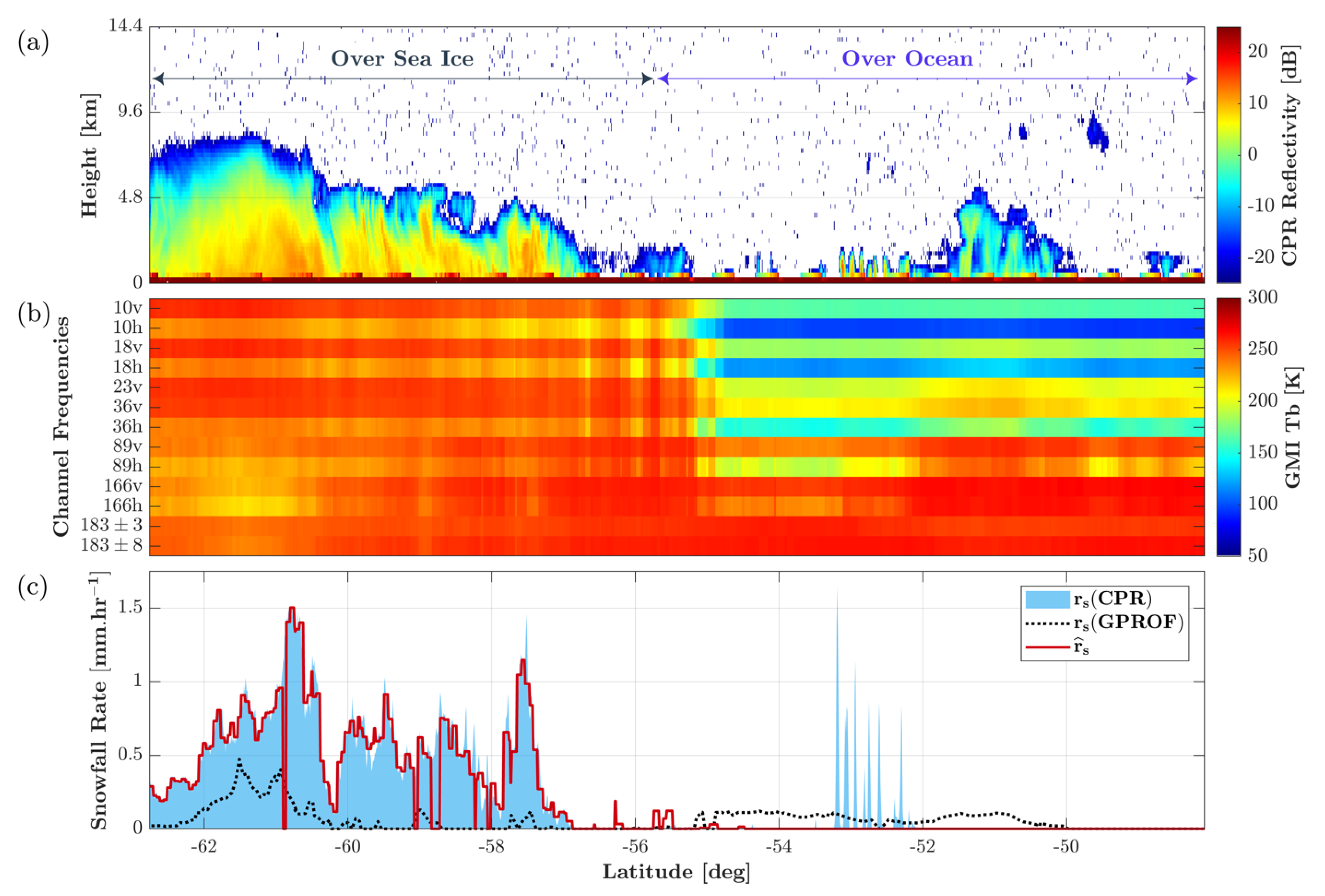
3.1. TB Signatures and Retrieval of High-Latitude Snowfall over Open Oceans and Sea Ice
3.2. Exploitation of Cloudsat for Passive MW Snowfall Retrieval Algorithms
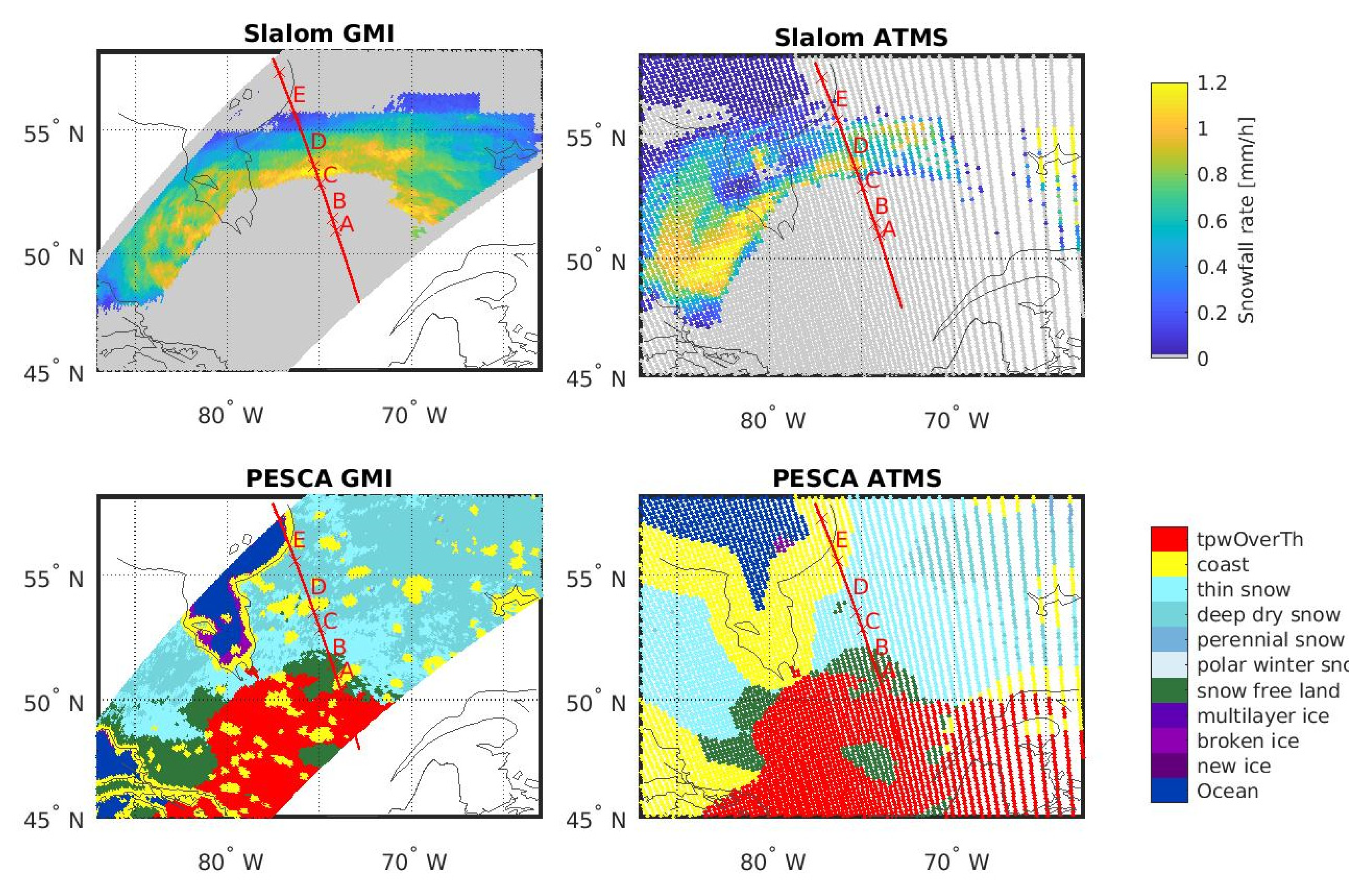
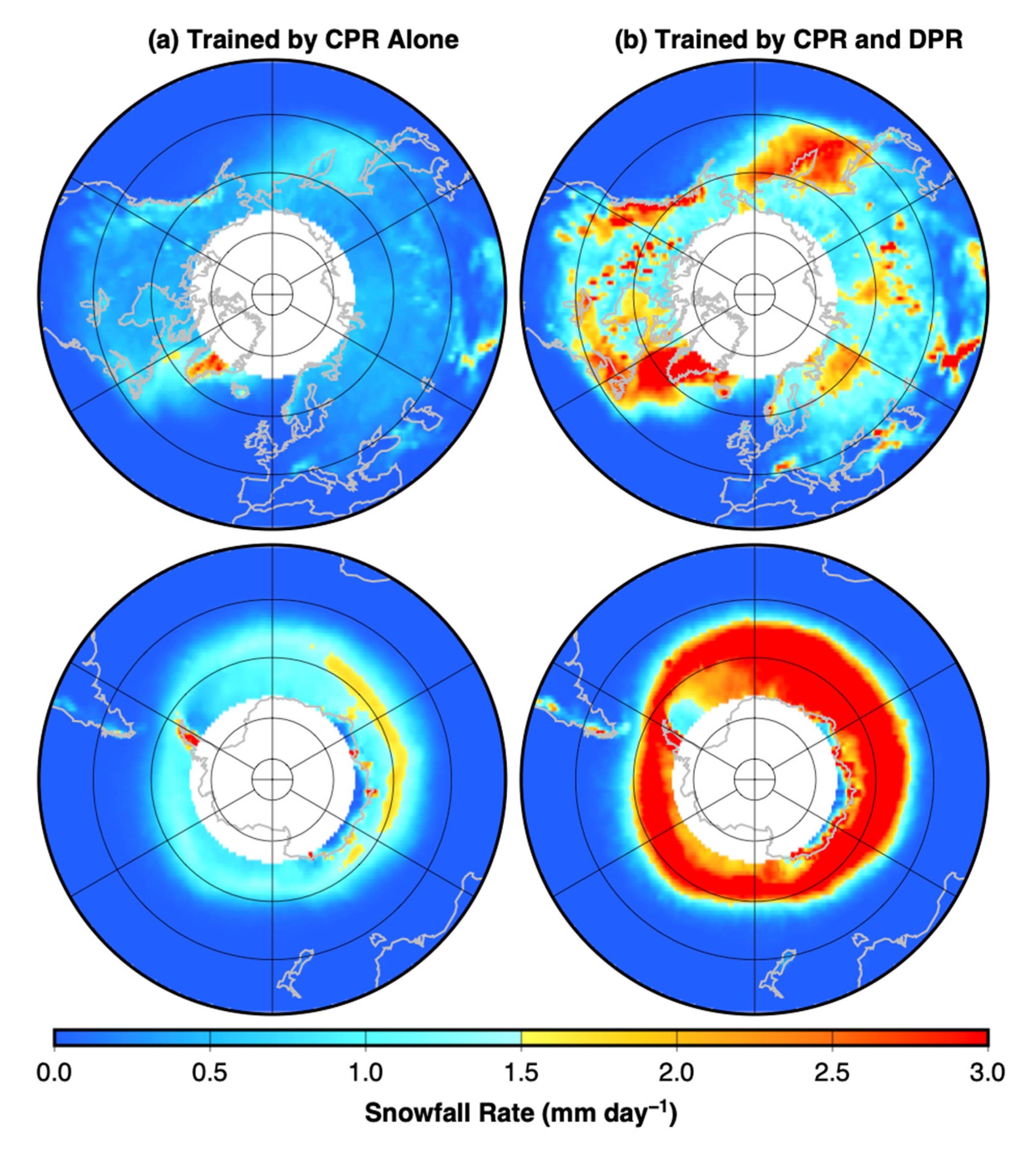
3.3. High Latitude Snow Detection and Distribution
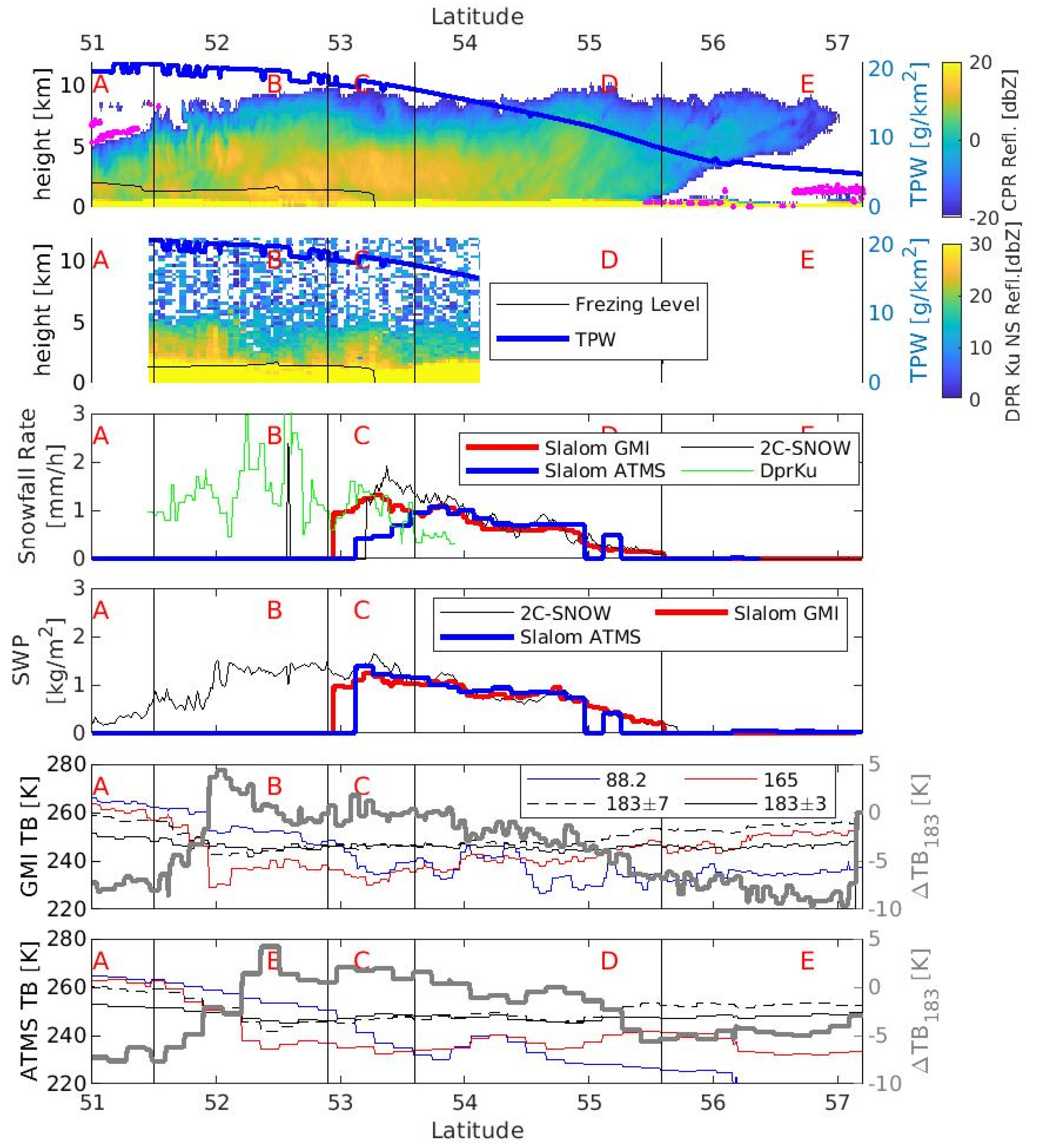
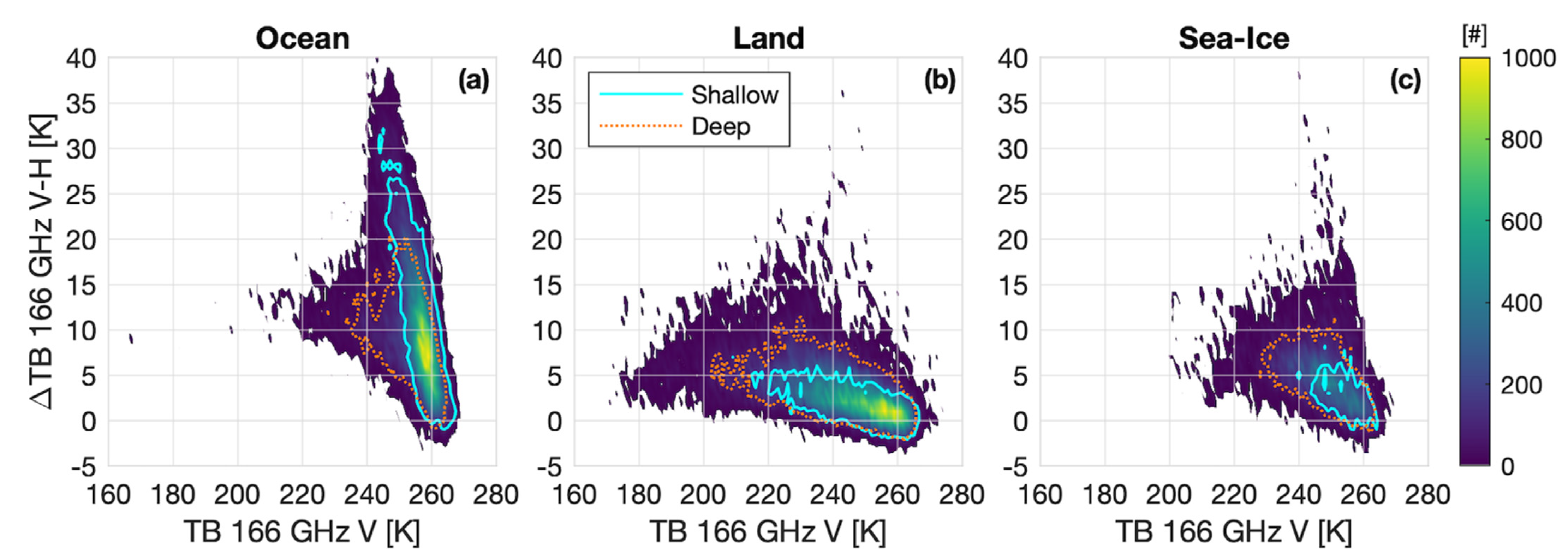
3.4. TB Signatures Due to Shallow Cumuliform and Deep Stratiform Snowfall Regimes
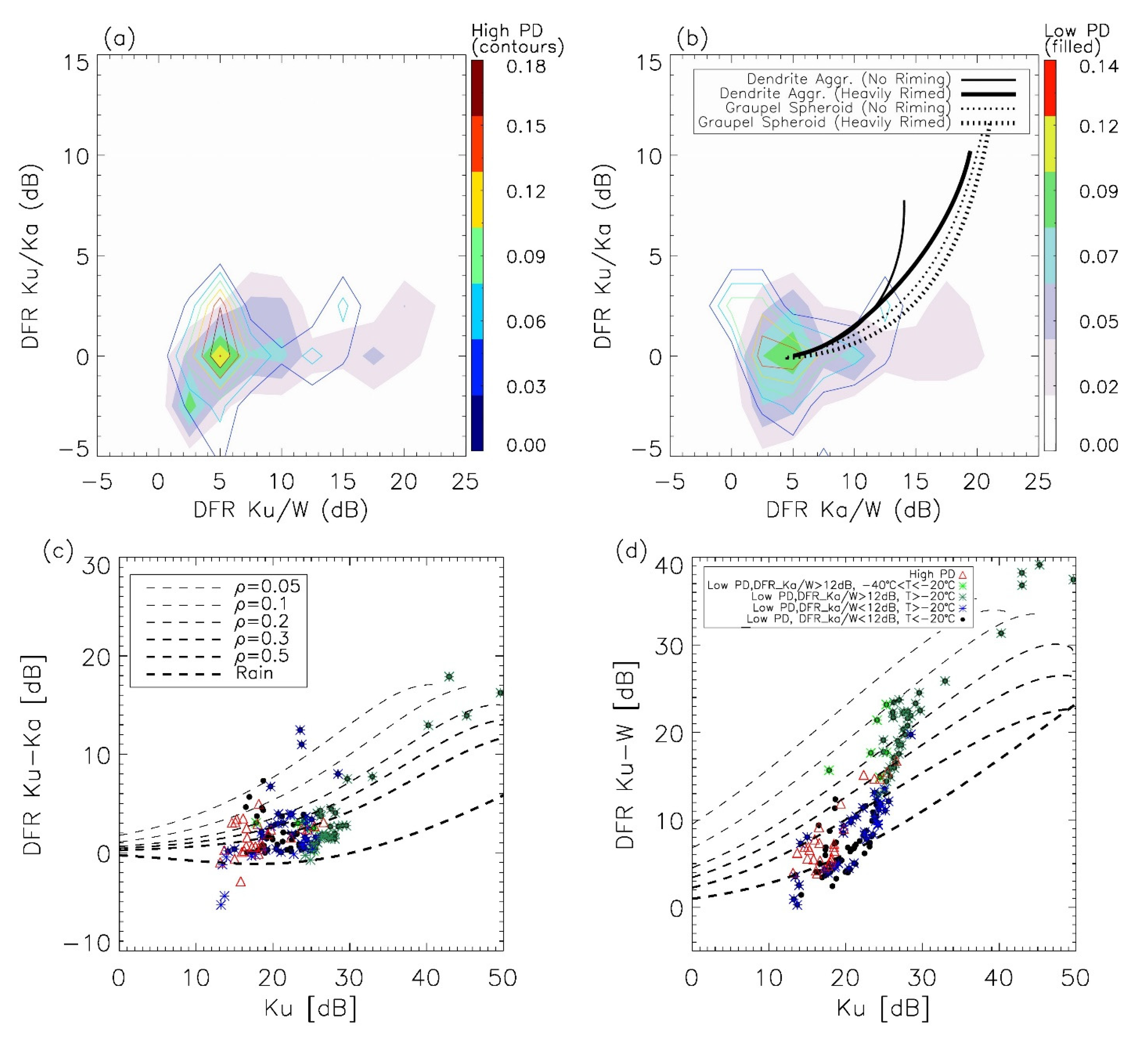
4. Cloud and Precipitation-Sized Ice Microphysics
4.1. Ice Crystal Habit and Orientation
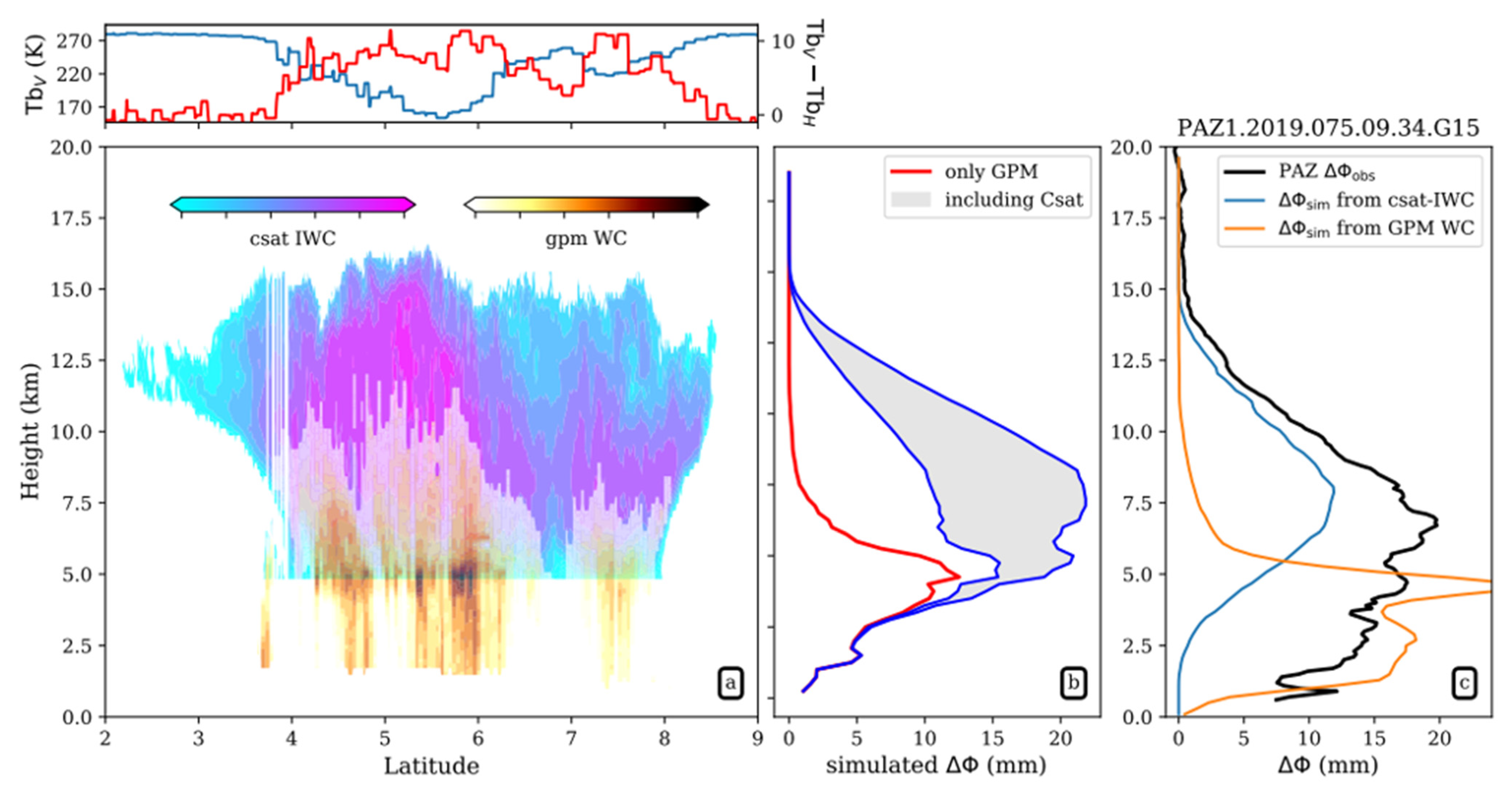
4.2. GNSS Differential Propagation Phase through Ice Media
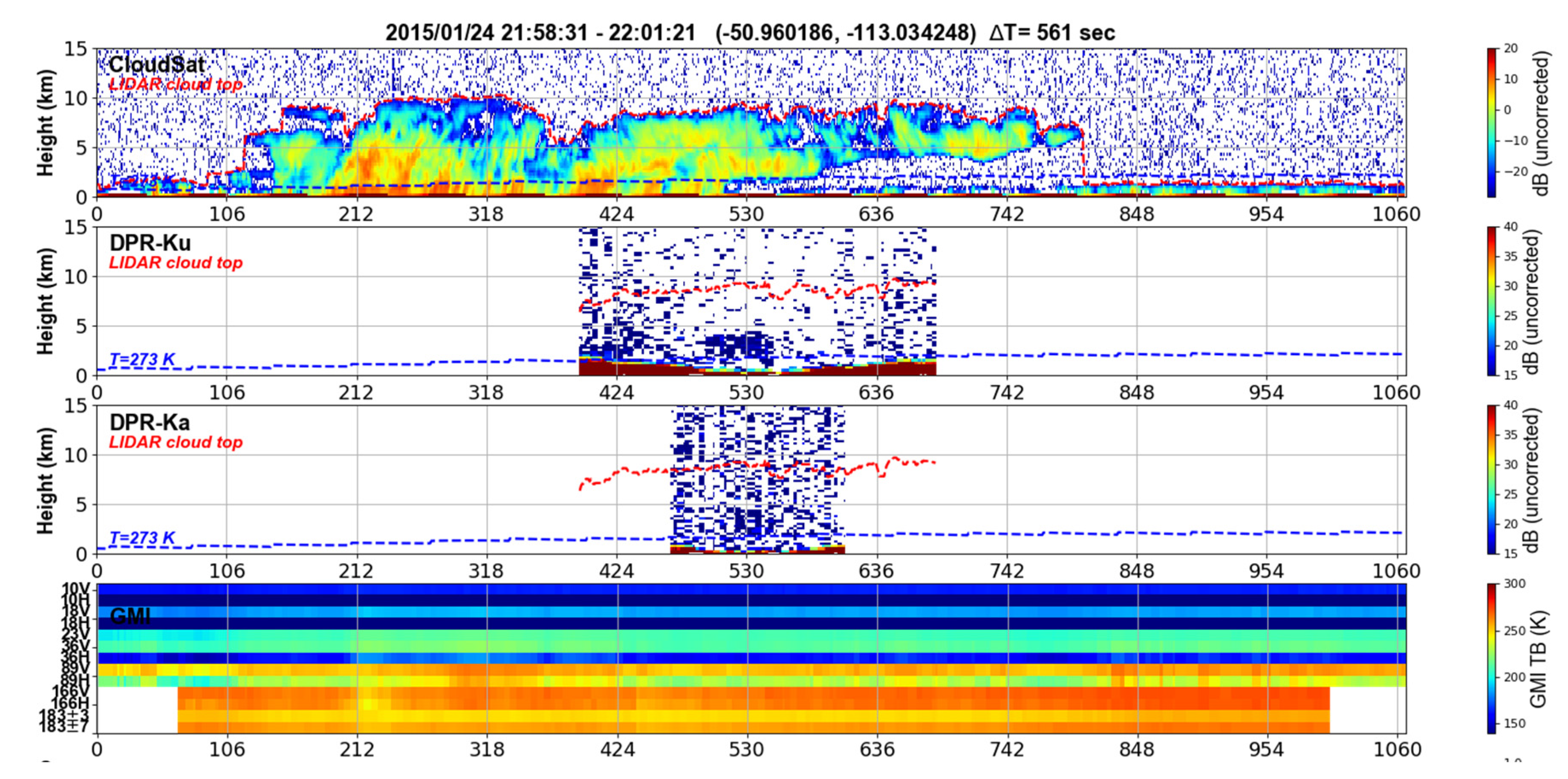
5. Light Precipitation and Surface Emissivity Related Effects
5.1. Accounting for Light Precipitation in the GPM Combined Radar—Radiometer Precipitation Profile
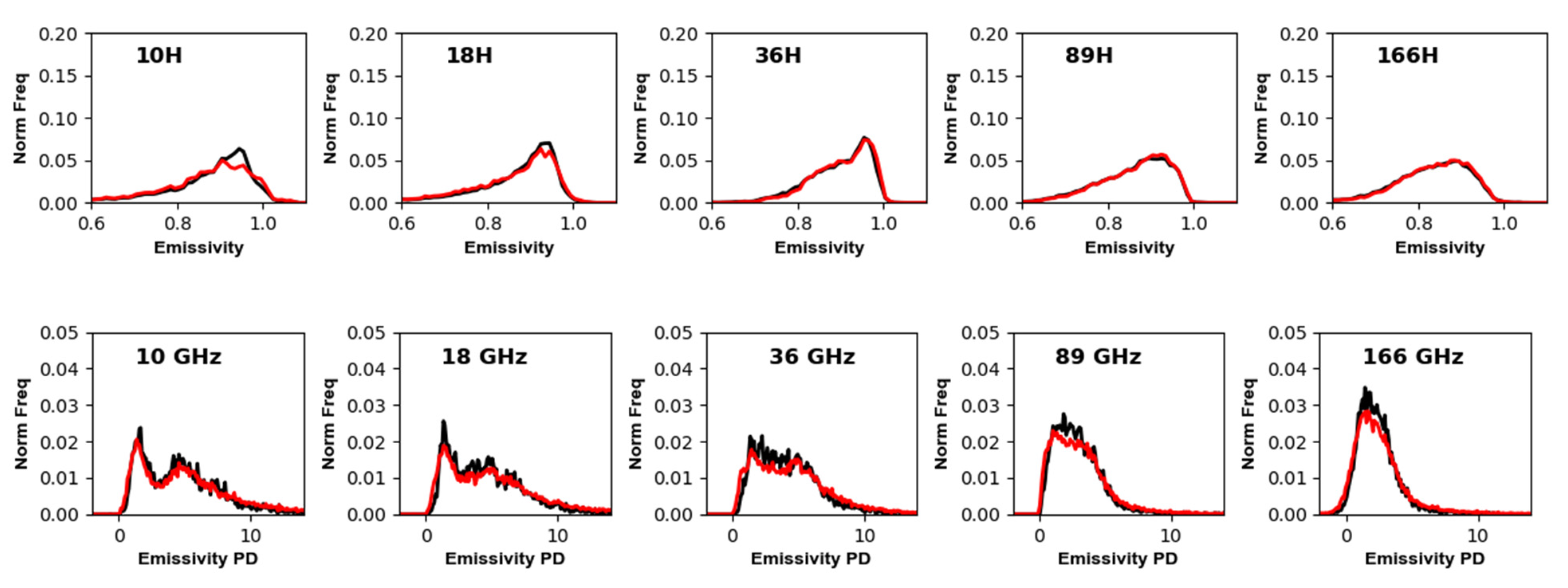
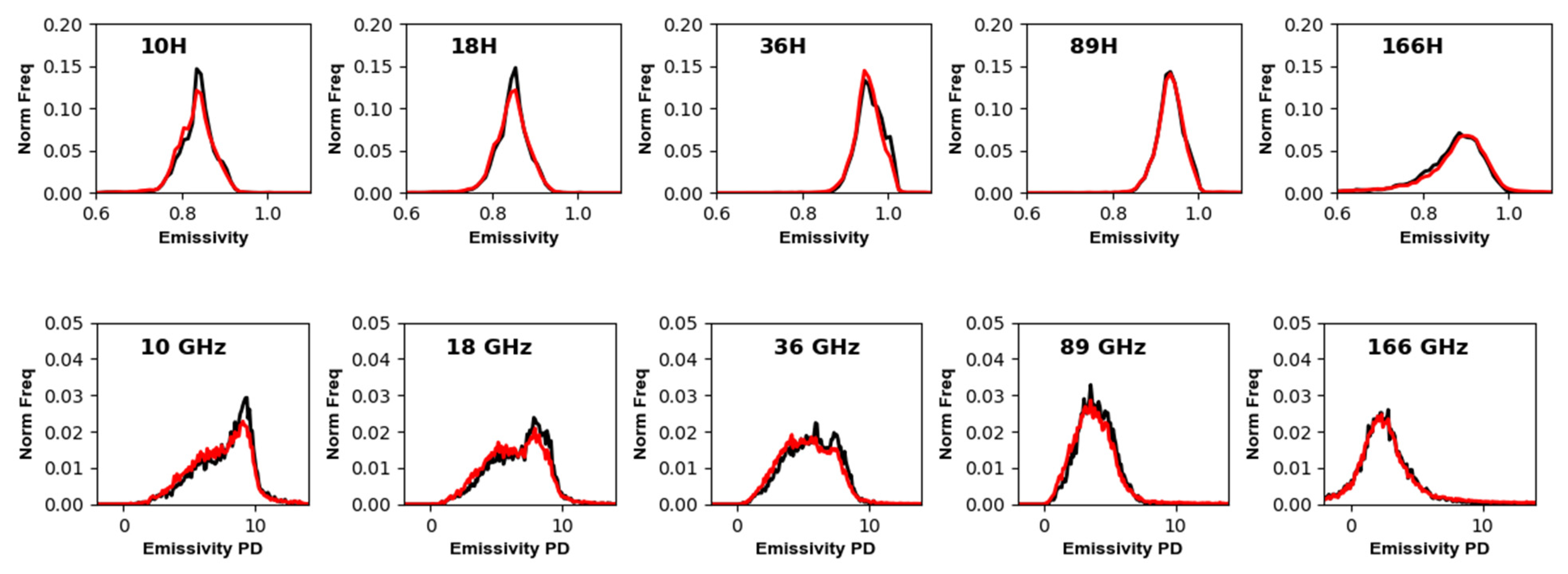
5.2. Cloud Effects on the Estimation of Surface Emissivity Variability
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Data Content and Format

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset Name | Satellite | Description | Availability |
|---|---|---|---|
| 2A.GPM.DPR | GPM | DPR Ku-only and Ku/Ka-band radar reflectivity profile and precipitation retrievals | 03/2014-current |
| 2B.GPM.DPRGMI. CORRA | GPM | DPR+GMI combined precipitation profiling algorithm | |
| 1C.GPM.GMI.XCAL | GPM | GMI Level 1C brightness temperatures | |
| 2A.GPM.GMI.GPROF | GPM | GPROF precipitation retrieval algorithm for GMI | |
| 2A.TRMM.PR | TRMM | DPR Ku-only and Ku/Ka-band radar reflectivity profile and precipitation retrievals | 06/2006–09/2014 |
| 2B.TRMM.PRTMI.CORRA | TRMM | DPR+GMI combined precipitation profiling algorithm | |
| 1C.TRMM.TMI.XCAL | TRMM | GMI Level 1C brightness temperatures | |
| 2A.TRMM.TMI.GPROF | TRMM | GPROF precipitation retrieval algorithm for GMI | |
| 2B-GEOPROF | CloudSat | CloudSat Profiling Radar (CPR) vertical reflectivity profile. | 06/2006–07/2019 |
| 2B-GEOPROF-LIDAR | CloudSat+CALIPSO | CPR+CALIOP vertical cloud detection profile | 06/2006–11/2017 |
| ECMWF-AUX | ECMWF | ECMWF forecast analysis interpolated to each vertical CloudSat bin | 06/2006–07/2019 |
| MODIS-AUX | Aqua | MODIS 1-km thermal channels 20 and 27–36, and cloud mask for a 3 × 5-km region surrounding each CloudSat beam | 06/2006–11/2017 |
| 2C-SNOW-PROFILE | CloudSat | CPR snowfall rate profile | 06/2006–07/2019 |
| 2C-RAIN-PROFILE | CloudSat | CPR precipitation rate profile | 06/2006–01/2019 |
| 2C-PRECIP-COLUMN | CloudSat | CPR column-average precipitation rate | 06/2006–10/2017 |
| 2B-CWC-RO | CloudSat | CPR Radar-Only Cloud Water Content Product | 06/2006–07/2019 |
| 2B-CWC-RVOD | CloudSat+Aqua | CPR+MODIS Radar-Visible Optical Depth Cloud Water Content Product | 06/2006–01/2017 |
| 2C-ICE | CloudSat+CALIPSO | CPR+CALIOP ice cloud water content, effective radius and extinction coefficient for identified ice clouds | 06/2006–11/2017 |
| 2B-CLDCLASS | CloudSat | CPR cloud type classification | 06/2006–07/2019 |
| 1C.NOAA18.MHS.XCAL | NOAA-18 | MHS Level 1C brightness temperatures (CloudSat-TRMM period only) | 06/2006–12/2012 |
| 2A.NOAA18.MHS.GPROF | NOAA-18 | GPROF precipitation retrieval algorithm for MHS (CloudSat-TRMM period only) | 06/2006–12/2012 |
| 1C.NPP.ATMS.XCAL | Suomi-NPP | ATMS Level 1C brightness temperatures (CloudSat-GPM period only) | 03/2014–current |
| 2A.NPP.ATMS.GPROF | Suomi-NPP | GPROF precipitation profiling algorithm for ATMS (CloudSat-GPM period only) | 03/2014–current |
| Field | Value from the Example | Description |
|---|---|---|
| 1 | 51S | Latitude of the orbit crossing, to the nearest degree |
| 2 | 113W | Longitude of the orbit crossing, to the nearest degree |
| 3 | 07487 | Number of CloudSat bins where the cloud mask ≥ 40 |
| 4 | 000 | Percent of CloudSat profiles that are over land |
| 5 | 279 | Minimum 2-m air temperature (K) from all CloudSat profiles in the dataset |
| 6 | 561 | Time offset (absolute value, seconds) between CloudSat and GPM |
| Index | Description |
|---|---|
| 1 | Ocean |
| 2 | Sea ice |
| 3–7 | Decreasing level of vegetation |
| 8–11 | Decreasing snow cover |
| 12 | Inland water |
| 13 | Coast |
| 14 | Ocean-sea ice boundary |
| Array Index | MODIS Channel | Channel Bandwidth (um) |
|---|---|---|
| 0 | 20 | 3.660–3.840 |
| 1 | 27 | 6.535–6.895 |
| 2 | 28 | 7.175–7.475 |
| 3 | 29 | 8.400–8.700 |
| 4 | 30 | 9.580–9.880 |
| 5 | 31 | 10.780–11.280 |
| 6 | 32 | 11.770–12.270 |
| 7 | 33 | 13.185–13.485 |
| 8 | 34 | 13.485–13.785 |
| 9 | 35 | 13.785–14.085 |
| 10 | 36 | 14.085–14.385 |
References
- Hamada, A.; Takayabu, Y.N. Improvements in Detection of Light Precipitation with the Global Precipitation Measurement Dual-Frequency Precipitation Radar (GPM DPR). J. Atmos. Ocean. Technol. 2016, 33, 653–667. [Google Scholar] [CrossRef]
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The global precipitation measurement mission. Bull. Am. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Battaglia, A.; Tanelli, S.; Mroz, K.; Tridon, F. Multiple scattering in observations of the GPM dual-frequency precipitation radar: Evidence and impact on retrievals. J. Geophys. Res. Atmos. 2015. [Google Scholar] [CrossRef] [Green Version]
- Masaki, T.; Iguchi, T.; Kanemaru, K.; Furukawa, K.; Yoshida, N.; Kubota, T.; Oki, R. Calibration of the Dual-Frequency Precipitation Radar Onboard the Global Precipitation Measurement Core Observatory. IEEE Trans. Geosci. Remote Sens. 2020, 1–16. [Google Scholar] [CrossRef]
- Behrangi, A.; Tian, Y.; Lambrigtsen, B.H.; Stephens, G.L. What does CloudSat reveal about global land precipitation detection by other spaceborne sensors? Water Resour. Res. 2014, 50, 4893–4905. [Google Scholar] [CrossRef]
- Gultepe, I.; Heymsfield, A.J.; Field, P.R.; Axisa, D. Ice-Phase Precipitation. Meteorol. Monogr. 2017, 58, 6.1–6.36. [Google Scholar] [CrossRef]
- Seto, S.; Iguchi, T.; Meneghini, R.; Awaka, J.; Kubota, T.; Masaki, T.; Takahashi, N. The Precipitation Rate Retrieval Algorithms for the GPM Dual-frequency Precipitation Radar. J. Meteorol. Soc. Jpn. 2021, 99, 205–237. [Google Scholar] [CrossRef]
- Grecu, M.; Olson, W.S.; Munchak, S.J.; Ringerud, S.; Liao, L.; Haddad, Z.; Kelley, B.L.; McLaughlin, S.F. The GPM Combined Algorithm. J. Atmos. Ocean. Technol. 2016, 33, 2225–2245. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Thriving on Our Changing Planet: A Decadal Strategy for Earth Observation from Space; The National Academies Press: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Stephens, G.L.; Vane, D.G.; Tanelli, S.; Im, E.; Durden, S.; Rokey, M.; Reinke, D.; Partain, P.; Mace, G.G.; Austin, R.; et al. CloudSat mission: Performance and early science after the first year of operation. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Stephens, G.; Winker, D.; Pelon, J.; Trepte, C.; Vane, D.; Yuhas, C.; L’Ecuyer, T.; Lebsock, M. CloudSat and CALIPSO within the A-Train: Ten Years of Actively Observing the Earth System. Bull. Am. Meteorol. Soc. 2018, 99, 569–581. [Google Scholar] [CrossRef] [Green Version]
- Milani, L.; Wood, N.B. Biases in CloudSat Falling Snow Estimates Resulting from Daylight-Only Operations. Remote Sens. 2021, 13, 2041. [Google Scholar] [CrossRef]
- Yamamoto, K.; Kubota, T.; Takahashi, N.; Kanemaru, K.; Masaki, T.; Furukawa, K. A Feasibility Study on Wide Swath Observation by Spaceborne Precipitation Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3047–3057. [Google Scholar] [CrossRef]
- Takahashi, N. 2020: Release notes for the DPR Version 06X Level 2 and Level 3 Experimental Products. Available online: https://www.eorc.jaxa.jp/GPM/doc/algorithm/DPRL2_V06X_algorithm_June2020b.pdf (accessed on 25 April 2021).
- Kummerow, C.D.; Randel, D.L.; Kulie, M.; Wang, N.Y.; Ferraro, R.; Joseph, M.S.; Petkovic, V. The evolution of the Goddard profiling algorithm to a fully parametric scheme. J. Atmos. Ocean. Technol. 2015, 32, 2265–2280. [Google Scholar] [CrossRef]
- Notarnicola, C.; Di Rosa, D.; Posa, F. Cross-Comparison of MODIS and CloudSat Data as a Tool to Validate Local Cloud Cover Masks. Atmosphere 2011, 2, 242–255. [Google Scholar] [CrossRef] [Green Version]
- Mace, G.G.; Zhang, Q.; Vaughan, M.; Marchand, R.; Stephens, G.; Trepte, C.; Winker, D. A description of hydrometeor layer occurrence statistics derived from the first year of merged Cloudsat and CALIPSO data. J. Geophys. Res. 2009, 114, D00A26. [Google Scholar] [CrossRef] [Green Version]
- Kidd, C.; Tan, J.; Kirstetter, P.-E.; Petersen, W.A. Validation of the Version 05 Level 2 precipitation products from the GPM Core Observatory and constellation satellite sensors. Quart. J. R. Meteorol. Soc. 2018, 144, 313–328. [Google Scholar] [CrossRef] [Green Version]
- Ryan, J.C.; Smith, L.C.; Wu, M.; Cooley, S.W.; Miège, C.; Montgomery, L.N.; Koenig, L.S.; Fettweis, X.; Noel, B.P.Y.; van den Broeke, M.R. Evaluation of CloudSat’s Cloud-Profiling Radar for Mapping Snowfall Rates Across the Greenland Ice Sheet. J. Geophys. Res. Atmos. 2020, 125, e2019JD031411. [Google Scholar] [CrossRef]
- Skofronick-Jackson, G.; Kulie, M.; Milani, L.; Munchak, S.J.; Wood, N.B.; Levizzani, V. Satellite Estimation of Falling Snow: A Global Precipitation Measurement (GPM) Core Observatory Perspective. J. Appl. Meteorol. Climatol. 2019, 58, 1429–1448. [Google Scholar] [CrossRef]
- Behrangi, A.; Christensen, M.; Richardson, M.; Lebsock, M.; Stephens, G.; Huffman, G.J.; Bolvin, D.; Adler, R.F.; Gardner, A.; Lambrigtsen, B.; et al. Status of high-latitude precipitation estimates from observations and reanalyses. J. Geophys. Res. Atmos. 2016, 121, 4468–4486. [Google Scholar] [CrossRef]
- Heymsfield, A.J.; Schmitt, C.; Chen, C.-C.-J.; Bansemer, A.; Gettelman, A.; Field, P.R.; Liu, C. Contributions of the Liquid and Ice Phases to Global Surface Precipitation: Observations and Global Climate Modeling. J. Atmos. Sci. 2020, 77, 2629–2648. [Google Scholar] [CrossRef]
- Meng, H.; Dong, J.; Ferraro, R.; Yan, B.; Zhao, L.; Kongoli, C.; Wang, N.-Y.; Zavodsky, B. A 1DVAR-based snowfall rate retrieval algorithm for passive microwave radiometers. J. Geophys. Res. Atmos. 2017, 122, 6520–6540. [Google Scholar] [CrossRef]
- Chase, R.; Nesbitt, S.W.; McFarquhar, G.M.; Wood, N.B.; Heymsfield, G.M. Direct comparisons between GPM-DPR and CloudSat snow retrievals reveal non-negligible attenuation issues for the 2C-SNOW-PROFILE retrieval. J. Appl. Meteor. Clim. 2021. in review. [Google Scholar]
- Casella, D.; Panegrossi, G.; Sanò, P.; Marra, A.C.; Dietrich, S.; Johnson, B.T.; Kulie, M.S. Evaluation of the GPM-DPR snowfall detection capability: Comparison with CloudSat-CPR. Atmos. Res. 2017, 197, 64–75. [Google Scholar] [CrossRef]
- Liu, G. Deriving snow cloud characteristics from CloudSat observations. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef] [Green Version]
- Kulie, M.S.; Milani, L.; Wood, N.B.; Tushaus, S.A.; Bennartz, R.; L’Ecuyer, T.S. A shallow cumuliform snowfall census using spaceborne radar. J. Hydrometeorol. 2016, 17, 1261–1279. [Google Scholar] [CrossRef]
- Kulie, M.S.; Milani, L. Seasonal variability of shallow cumuliform snowfall: A CloudSat perspective. Quart. J. R. Meteorol. Soc. 2018, 144, 329–343. [Google Scholar] [CrossRef] [Green Version]
- Takbiri, Z.; Ebtehaj, A.; Foufoula-Georgiou, E.; Kirstetter, P.-E.; Turk, F.J. A Prognostic Nested k-Nearest Approach for Microwave Precipitation Phase Detection over Snow Cover. J. Hydrometeorol. 2019, 20, 251–274. [Google Scholar] [CrossRef] [PubMed]
- Ebtehaj, A.; Kummerow, C.D.; Turk, F.J. Metric Learning for Approximation of Microwave Channel Error Covariance: Application for Satellite Retrieval of Drizzle and Light Snowfall. IEEE Trans. Geosci. Remote Sens. 2020, 58, 903–912. [Google Scholar] [CrossRef]
- Vahedizade, S.; Ebtehaj, A.; You, Y.; Ringerud, S.E.; Turk, F.J. Passive microwave signatures and retrieval of high-latitude snowfall over open oceans and sea ice: Insights from coincidences of GPM and CloudSat satellites. IEEE Trans. Geosci. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Wood, N.B.; L’Ecuyer, T.S.; Bliven, F.L.; Stephens, G.L. Characterization of video disdrometer uncertainties and impacts on estimates of snowfall rate and radar reflectivity. Atmos. Meas. Tech. 2013, 6, 3635–3648. [Google Scholar] [CrossRef] [Green Version]
- Wood, N.B.; L’Ecuyer, T.S.; Heymsfield, A.J.; Stephens, G.L.; Hudak, D.R.; Rodriguez, P. Estimating snow microphysical properties using collocated multisensor observations. J. Geophys. Res. Atmos. 2014, 119, 8941–8961. [Google Scholar] [CrossRef]
- Battaglia, A.; Panegrossi, G. What Can We Learn from the CloudSat Radiometric Mode Observations of Snowfall over the Ice-Free Ocean? Remote Sens. 2020, 12, 3285. [Google Scholar] [CrossRef]
- Panegrossi, G.; Rysman, J.-F.; Casella, D.; Marra, A.C.; Sanò, P.; Kulie, M.S. CloudSat-Based Assessment of GPM Microwave Imager Snowfall Observation Capabilities. Remote Sens. 2017, 9, 1263. [Google Scholar] [CrossRef] [Green Version]
- Rysman, J.-F.; Panegrossi, G.; Sanò, P.; Marra, A.C.; Dietrich, S.; Milani, L.; Kulie, M.S.; Casella, D.; Camplani, A.; Claud, C.; et al. Retrieving Surface Snowfall With the GPM Microwave Imager: A New Module for the SLALOM Algorithm. Geophys. Res. Lett. 2019, 46, 13593–13601. [Google Scholar] [CrossRef]
- Rysman, J.-F.; Panegrossi, G.; Sanò, P.; Marra, A.C.; Dietrich, S.; Milani, L.; Kulie, M.S. SLALOM: An All-Surface Snow Water Path Retrieval Algorithm for the GPM Microwave Imager. Remote Sens. 2018, 10, 1278. [Google Scholar] [CrossRef] [Green Version]
- Mroz, K.; Montopoli, M.; Battaglia, A.; Panegrossi, G.; Kirstetter, P.; Baldini, L. Cross Validation of Active and Passive Microwave Snowfall Products over the Continental United States. J. Hydrometeorol. 2021, 22, 1297–1315. [Google Scholar] [CrossRef]
- Edel, L.; Rysman, J.-F.; Claud, C.; Palerme, C.; Genthon, C. Potential of Passive Microwave around 183 GHz for Snowfall Detection in the Arctic. Remote Sens. 2019, 11, 2200. [Google Scholar] [CrossRef] [Green Version]
- Adhikari, A.; Ehsani, M.R.; Song, Y.; Behrangi, A. Comparative Assessment of Snowfall Retrieval From Microwave Humidity Sounders Using Machine Learning Methods. Earth Space Sci. 2020, 7, e2020EA001357. [Google Scholar] [CrossRef]
- Munchak, S.J.; Ringerud, S.; Brucker, L.; You, Y.; Gelis I de Prigent, C. An Active–Passive Microwave Land Surface Database From GPM. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6224–6242. [Google Scholar] [CrossRef]
- Turk, F.J.; Ringerud, S.E.; You, Y.; Camplani, A.; Casella, D.; Panegrossi, G.; Sanò, P.; Ebtehaj, A.; Guilloteau, C.; Utsumi, N.; et al. Adapting Passive Microwave-Based Precipitation Algorithms to Variable Microwave Land Surface Emissivity to Improve Precipitation Estimation from the GPM Constellation. J. Hydrometeorol. 2021. [Google Scholar] [CrossRef]
- Panegrossi, G.; Casella, D.; Sanò, P.; Camplani, A.; Battaglia, A. Recent Advances and Challenges in Snowfall detection and Estimation. In Precipitation Science; Michaelides, S., Ed.; Elsevier: Amsterdam, The Netherlands, 2021; in press. [Google Scholar]
- Camplani, A.; Casella, D.; Sanò, P.; Panegrossi, G. The Passive microwave Empirical cold Surface Classification Algorithm (PESCA): Application to GMI and ATMS. J. Hydrometeorol. 2021. [Google Scholar] [CrossRef]
- Eriksson, P.; Rydberg, B.; Mattioli, V.; Thoss, A.; Accadia, C.; Klein, U.; Buehler, S.A. Towards an operational Ice Cloud Imager (ICI) retrieval product. Atmos. Meas. Tech. 2020, 13, 53–71. [Google Scholar] [CrossRef] [Green Version]
- Yin, M.; Liu, G. Developing an a priori database for passive microwave snow water retrievals over ocean. J. Geophys. Res. Atmos. 2017, 122, 12960–12981. [Google Scholar] [CrossRef]
- Yin, M.; Liu, G. Assessment of GPM high frequency microwave measurements with radiative transfer simulation under snowfall conditions. Quart. J. R. Meteorol. Soc. 2019, 145, 1603–1616. [Google Scholar] [CrossRef]
- Liu, G.; Seo, E.-K. Detecting snowfall over land by satellite high-frequency microwave observations: The lack of scattering signature and a statistical approach. J. Geophys. Res. Atmos. 2013, 118, 1376–1387. [Google Scholar] [CrossRef]
- Sims, E.; Liu, G. A parameterization of the probability of snow-rain transition. J. Hydrometeorol. 2015, 16, 1466–1477. [Google Scholar] [CrossRef]
- Liu, G. Radar Snowfall Measurement. In Satellite Precipitation Measurement Advances in Global Change Research; Levizzani, V., Kidd, C., Kirschbaum, D., Kummerow, C., Nakamura, K., Turk, F., Eds.; Springer: Cham, Switzerland, 2020; Volume 67. [Google Scholar] [CrossRef]
- West, T.K.; Steenburgh, W.J.; Mace, G.G. Characteristics of Sea-Effect Clouds and Precipitation over the Sea of Japan Region as Observed by A-Train Satellites. J. Geophys. Res. 2019, 124, 1322–1335. [Google Scholar] [CrossRef]
- Battaglia, A.; Delanoë, J. Synergies and complementarities of CloudSat-CALIPSO snow observations. J. Geophys. Res. Atmos. 2013, 118, 721–731. [Google Scholar] [CrossRef] [Green Version]
- Battaglia, A.; Kollias, P.; Dhillon, R.; Roy, R.; Tanelli, S.; Lamer, K.; Grecu, M.; Lebsock, M.; Watters, D.; Mroz, K.; et al. Spaceborne Cloud and Precipitation Radars: Status, Challenges, and Ways Forward. Rev. Geophys. 2020, 58, e2019RG000686. [Google Scholar] [CrossRef] [PubMed]
- Milani, L.; Kulie, M.S.; Casella, D.; Kirstetter, P.E.; Panegrossi, G.; Petkovic, V.; Ringerud, S.E.; Rysman, J.-F.; Sanò, P.; Wang, N.-Y.; et al. Extreme Lake-Effect Snow from a GPM Microwave Imager Perspective: Observational Analysis and Precipitation Retrieval Evaluation. J. Atmos. Ocean. Technol. 2021, 38, 293–311. [Google Scholar] [CrossRef] [PubMed]
- Gultepe, I.; Rabin, R.; Ware, R.; Pavolonis, M. Chapter Three: Light Snow Precipitation and Effects on Weather and Climate. In Advances in Geophysic; Nielsen, L., Ed.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 147–210. [Google Scholar] [CrossRef]
- Majurec, N.; Sekelsky, S.M.; Schaubert, D.H.; Hong, Y.; Rutledge, S.A.; Stephens, G.L.; Heymsfield, A. Triple-frequency radar for cloud and precipitation microphysics research. In Proceedings of the 17th International Conference on Applied Electromagnetics and Communications, Dubrovnik, Croatia, 1–3 October 2003; pp. 18–21. [Google Scholar] [CrossRef]
- Kneifel, S.; Kulie, M.S.; Bennartz, R. A triple frequency approach to retrieve microphysical snowfall parameters. J. Geophys. Res. Atmos. 2011, 116, D11203. [Google Scholar] [CrossRef] [Green Version]
- Kneifel, S.; Leinonen, J.; Tyynelä, J.; Ori, D.; Battaglia, A. Scattering of Hydrometeors. In Satellite Precipitation Measurement; vol 1, vol. 67 of Advances in Global Change Research; Springer International Publishing: Cham, Switzerland, 2020; Volume 15, pp. 1–21. [Google Scholar] [CrossRef]
- Mason, S.L.; Hogan, R.J.; Westbrook, C.D.; Kneifel, S.; Moisseev, D.; von Terzi, L. The importance of particle size distribution and internal structure for triple-frequency radar retrievals of the morphology of snow. Atmos. Meas. Tech. 2019, 12, 4993–5018. [Google Scholar] [CrossRef] [Green Version]
- Kneifel, S.; Lerber, A.V.; Tiira, J.; Moisseev, D.; Kollias, P.; Leinonen, J. Observed relations between snowfall microphysics and triple-frequency radar measurements. J. Geophys. Res. Atmos. 2015, 120, 6034–6055. [Google Scholar] [CrossRef] [Green Version]
- Chase, R.J.; Finlon, J.A.; Borque, P.; McFarquhar, G.M.; Nesbitt, S.W.; Tanelli, S.; Sy, O.O.; Durden, S.L.; Poellot, M.R. Evaluation of Triple-Frequency Radar Retrieval of Snowfall Properties Using Coincident Airborne In Situ Observations During OLYMPEX. Geophys. Res. Lett. 2018, 45, 5752–5760. [Google Scholar] [CrossRef]
- Yin, M.; Liu, G.; Honeyager, R.; Turk, F.J. Observed differences of triple-frequency radar signatures between snowflakes in stratiform and convective clouds. J. Quant. Spectrosc. Radiom. 2017, 193, 13–20. [Google Scholar] [CrossRef]
- Gong, J.; Zeng, X.; Wu, D.L.; Munchak, S.J.; Li, X.; Kneifel, S.; Ori, D.; Liao, L.; Barahona, D. Linkage among ice crystal microphysics, mesoscale dynamics, and cloud and precipitation structures revealed by collocated microwave radiometer and multifrequency radar observations. Atmos. Chem. Phys. 2020, 20, 12633–12653. [Google Scholar] [CrossRef]
- Gong, J.; Wu, D.L. Microphysical Properties of Frozen Particles Inferred from Global Precipitation Measurement (GPM) Microwave Imager (GMI) Polarimetric Measurements. Atmos. Chem. Phys. 2017, 17, 2741–2757. [Google Scholar] [CrossRef] [Green Version]
- Zeng, X.; Gong, J.; Li, X.; Wu, D.L. Modeling the Radiative Effect on Microphysics in Cirrus Clouds Against Satellite Observations. J. Geophys. Res. Atmos. 2021, 126, e2020JD033923. [Google Scholar] [CrossRef] [PubMed]
- Cardellach, E.; Oliveras, S.; Rius, A.; Tomás, S.; Ao, C.O.; Franklin, G.W.; Iijima, B.A.; Kuang, D.; Meehan, T.K.; Padullés, R.; et al. Sensing heavy precipitation with GNSS polarimetric radio occultations. Geophys. Res. Lett. 2019, 46, 1024–1031. [Google Scholar] [CrossRef] [Green Version]
- Padullés, R.; Cardellach, E.; Turk, F.J.; Ao, C.O.; de la Torre-Juarez, M.; Gong, J.; Wu, D. Sensing Horizontally Oriented Frozen Particles with Polarimetric Radio Occultations aboard PAZ: Validation Using GMI Coincident Observations and Cloudsat a-priori Information. IEEE Trans. Geosci. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Adler, R.F. Global Precipitation: Means, Variations and Trends During the Satellite Era (1979–2014). Surv. Geophys. 2017, 38, 679–699. [Google Scholar] [CrossRef] [Green Version]
- Meissner, T.; Wentz, F.J. The emissivity of the ocean surface between 6 and 90 GHz over a large range of wind speeds and earth incidence angles. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3004–3026. [Google Scholar] [CrossRef]
- Prigent, C.; Aires, F.; Rossow, W.B. Land surface microwave emissivities over the globe for a decade. Bull. Am. Meteorol. Soc. 2006, 87, 1573–1584. [Google Scholar] [CrossRef] [Green Version]
- Illingworth, A.J.; Barker, H.W.; Beljaars, A.; Ceccaldi, M.; Chepfer, H.; Clerbaux, N.; Cole, J.; Delanoë, J.; Domenech, C.; Donovan, D.P.; et al. The EarthCARE satellite: The next step forward in global measurements of clouds, aerosols, precipitation, and radiation. Bull. Am. Meteorol. Soc. 2015, 96, 1311–1332. [Google Scholar] [CrossRef] [Green Version]
- Im, E.; Peral, E.; Sanchez-Barbetty, M.; Tanelli, S. The next generation of spaceborne radars for cloud and precipitation measurements. Int. Conf. Radar Syst. 2017. [Google Scholar] [CrossRef]
- Stephens, G.; Freeman, A.; Richard, E.; Pilewskie, P.; Larkin, P.; Chew, C.; Tanelli, S.; Brown, S.; Posselt, D.; Peral, E. The Emerging Technological Revolution in Earth Observations. Bull. Am. Meteorol. Soc. 2020, 101, E274–E285. [Google Scholar] [CrossRef]
- Blackwell, W.J.; Braun, S.; Bennartz, R.; Velden, C.; DeMaria, M.; Atlas, R.; Dunion, J.; Marks, F.; Rogers, R.; Annane, B.; et al. An overview of the TROPICS NASA Earth Venture Mission. Quart. J. R. Meteorol. Soc. 2018, 144, 16–26. [Google Scholar] [CrossRef] [Green Version]
- Battaglia, A.; Westbrook, C.D.; Kneifel, S.; Kollias, P.; Humpage, N.; Löhnert, U.; Tyynelä, J.; Petty, G.W. G-band atmospheric radars: New frontiers in cloud physics. Atmos. Meas. Tech. 2014, 7, 1527–1546. [Google Scholar] [CrossRef] [Green Version]
- Nam, C.C.W.; Quaas, J. Evaluation of Clouds and Precipitation in the ECHAM5 General Circulation Model Using CALIPSO and CloudSat Satellite Data. J. Clim. 2012, 25, 4975–4992. [Google Scholar] [CrossRef] [Green Version]
- Awaka, J.; Le, M.; Chandrasekar, V.; Yoshida, N.; Higashiuwatoko, T.; Kubota, T.; Iguchi, T. Rain Type Classification Algorithm Module for GPM Dual-Frequency Precipitation Radar. J. Atmos. Ocean. Technol. 2016, 33, 1887–1898. [Google Scholar] [CrossRef]
- Utsumi, N.; Turk, F.J.; Haddad, Z.S.; Kirstetter, P.-E.; Kim, H. Evaluation of precipitation vertical profiles estimated by GPM-era satellite-based passive microwave retrievals. J. Hydrometeorol. 2020. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Turk, F.J.; Ringerud, S.E.; Camplani, A.; Casella, D.; Chase, R.J.; Ebtehaj, A.; Gong, J.; Kulie, M.; Liu, G.; Milani, L.; et al. Applications of a CloudSat-TRMM and CloudSat-GPM Satellite Coincidence Dataset. Remote Sens. 2021, 13, 2264. https://doi.org/10.3390/rs13122264
Turk FJ, Ringerud SE, Camplani A, Casella D, Chase RJ, Ebtehaj A, Gong J, Kulie M, Liu G, Milani L, et al. Applications of a CloudSat-TRMM and CloudSat-GPM Satellite Coincidence Dataset. Remote Sensing. 2021; 13(12):2264. https://doi.org/10.3390/rs13122264
Chicago/Turabian StyleTurk, F. Joseph, Sarah E. Ringerud, Andrea Camplani, Daniele Casella, Randy J. Chase, Ardeshir Ebtehaj, Jie Gong, Mark Kulie, Guosheng Liu, Lisa Milani, and et al. 2021. "Applications of a CloudSat-TRMM and CloudSat-GPM Satellite Coincidence Dataset" Remote Sensing 13, no. 12: 2264. https://doi.org/10.3390/rs13122264
APA StyleTurk, F. J., Ringerud, S. E., Camplani, A., Casella, D., Chase, R. J., Ebtehaj, A., Gong, J., Kulie, M., Liu, G., Milani, L., Panegrossi, G., Padullés, R., Rysman, J. -F., Sanò, P., Vahedizade, S., & Wood, N. B. (2021). Applications of a CloudSat-TRMM and CloudSat-GPM Satellite Coincidence Dataset. Remote Sensing, 13(12), 2264. https://doi.org/10.3390/rs13122264