
Spatiotemporal Continuous Impervious Surface Mapping by Fusion of Landsat Time Series Data and Google Earth Imagery


 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
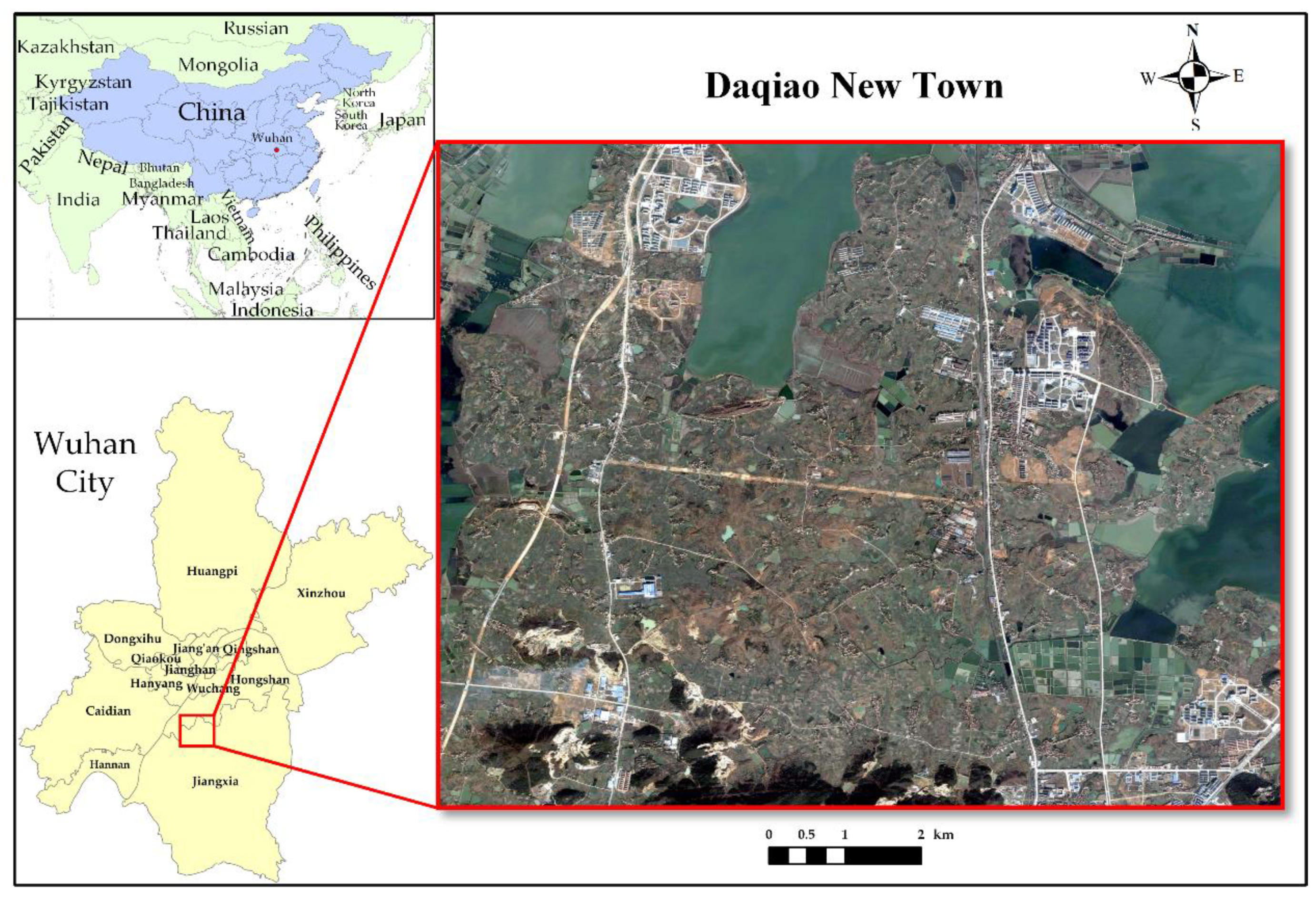
2.1. Study Area
2.2. Datasets and Pre-Procession
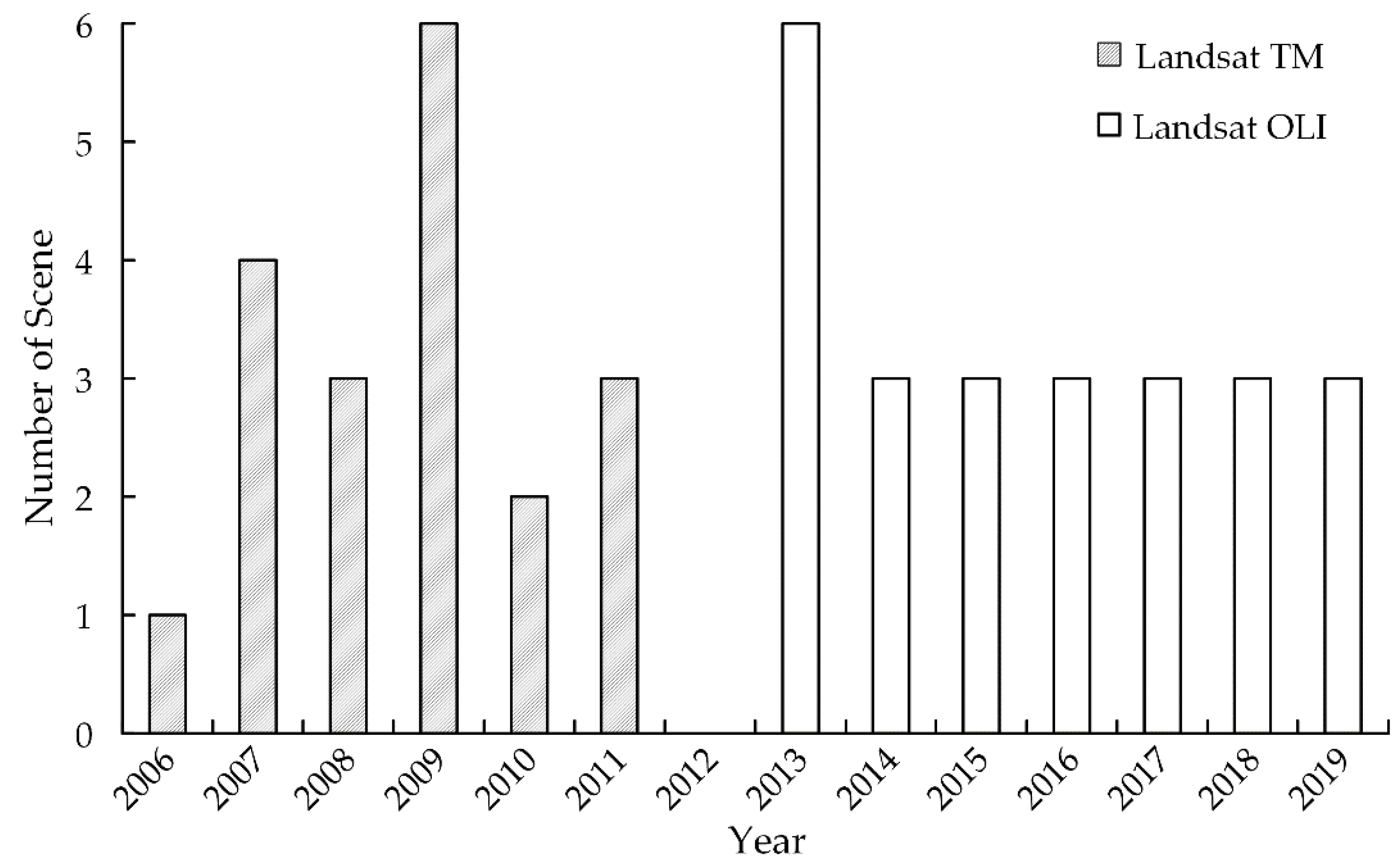
2.2.1. Coarse-Spatial-Fine-Temporal Landsat Data
2.2.2. Fine-Spatial-Coarse-Temporal Data
2.3. Methodology
2.3.1. F-MESMA Unmixing
2.3.2. Bayesian-STSRM
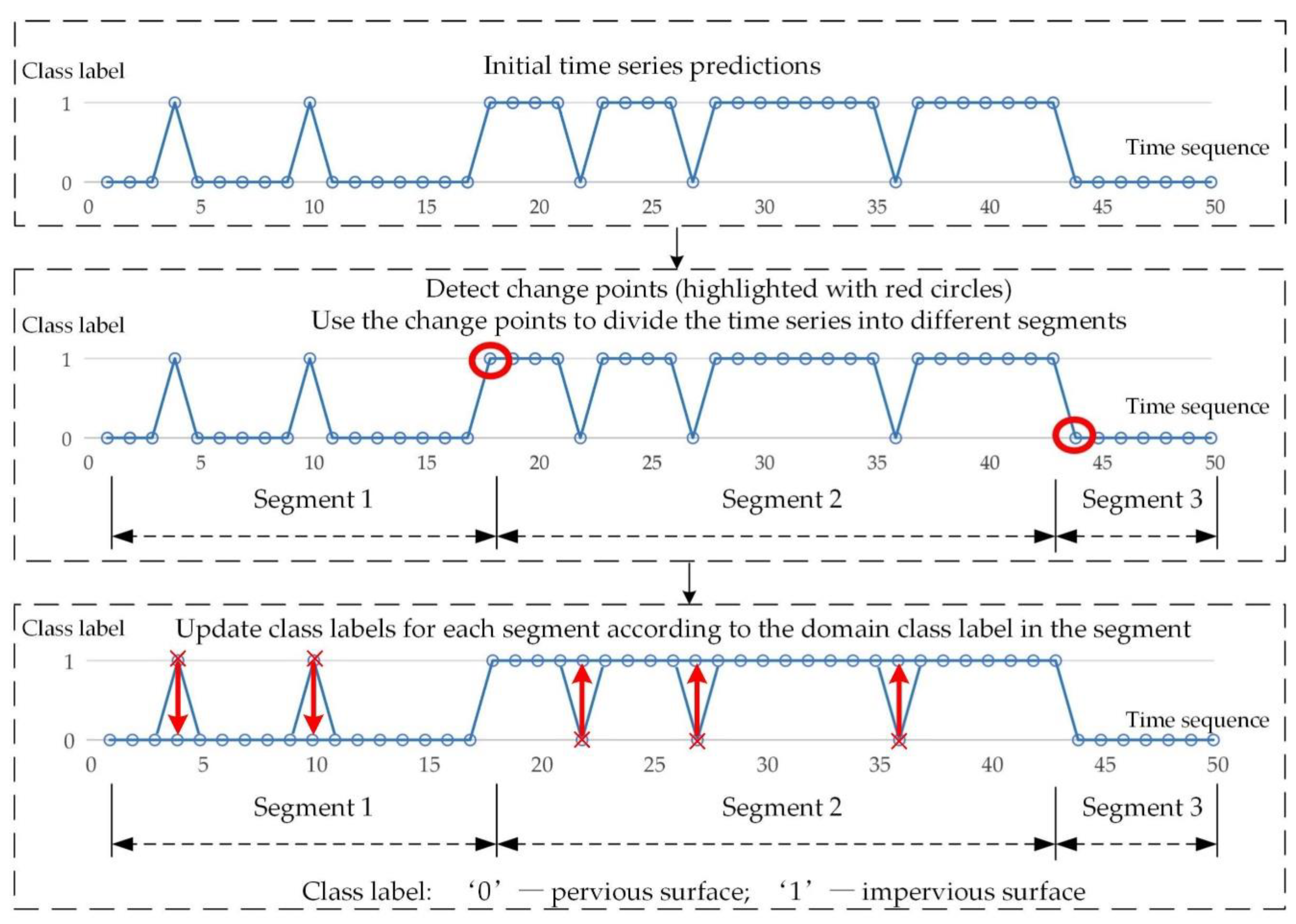
2.3.3. Temporal Consistency Check
- (1)
- Detect change points
- (2)
- Update class labels for each segment
2.3.4. Accuracy Assessment
3. Results
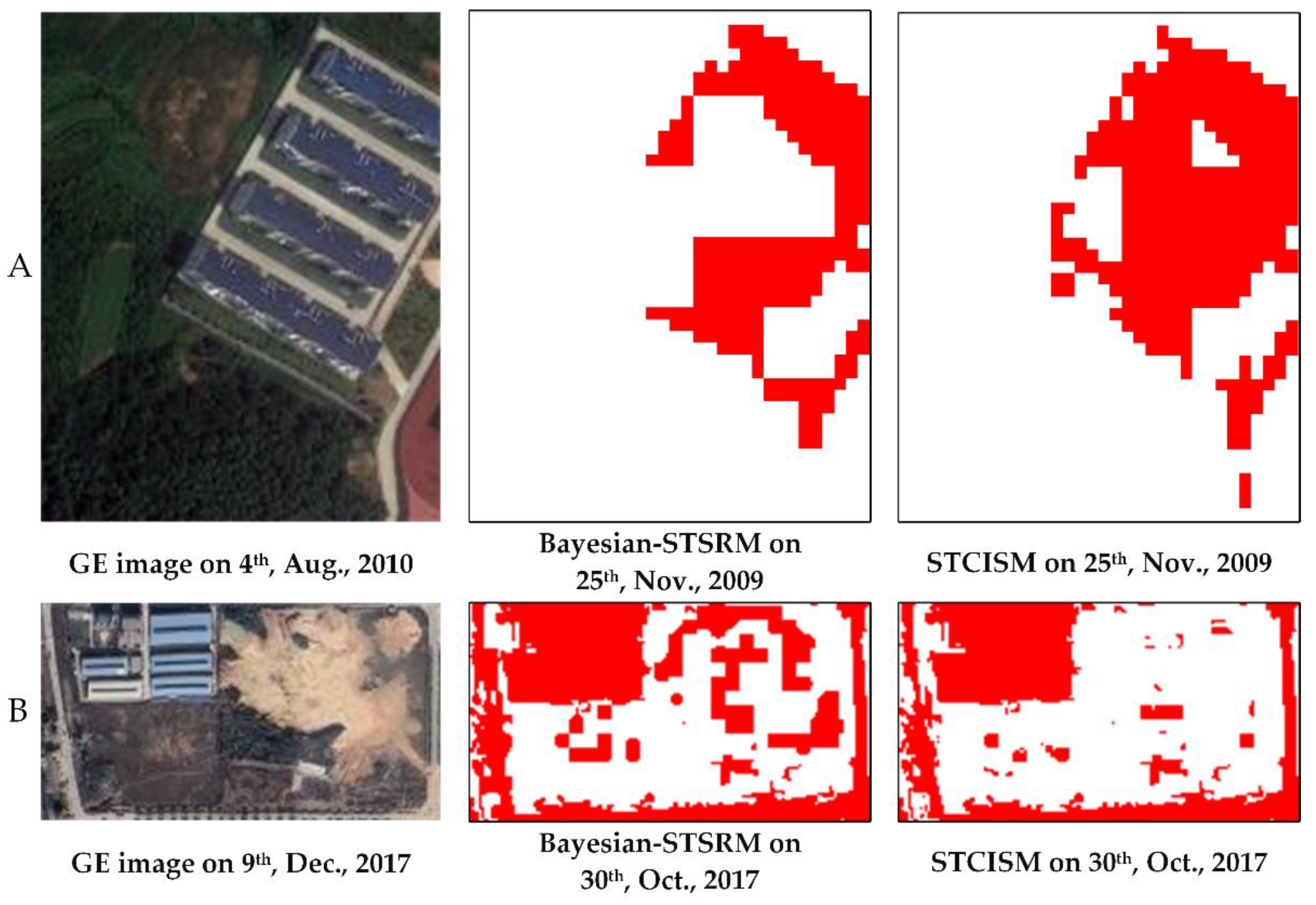
3.1. Comparison between Bayesian-STSRM and STCISM
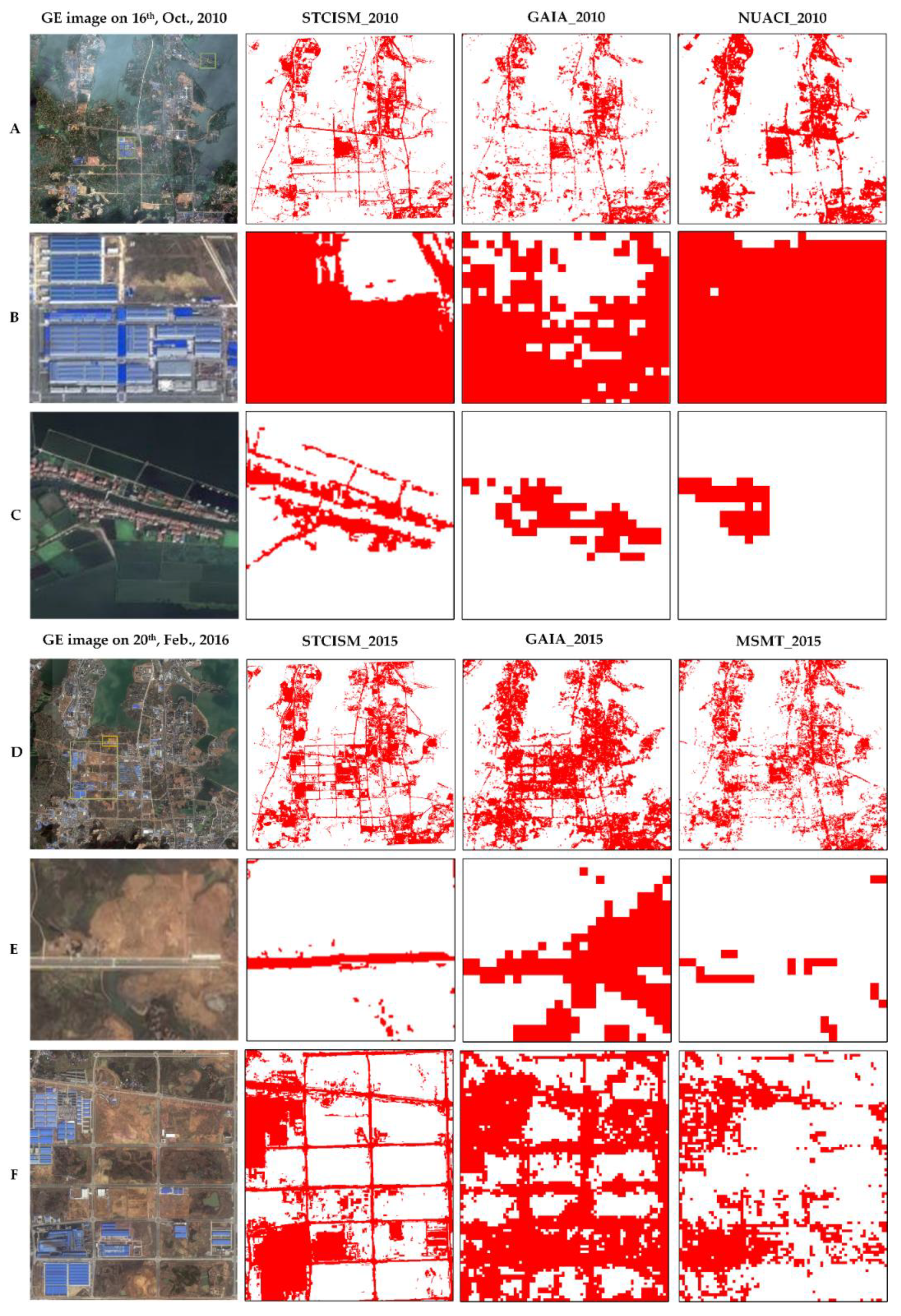
3.2. Comparison with Other Impervious Surface Products
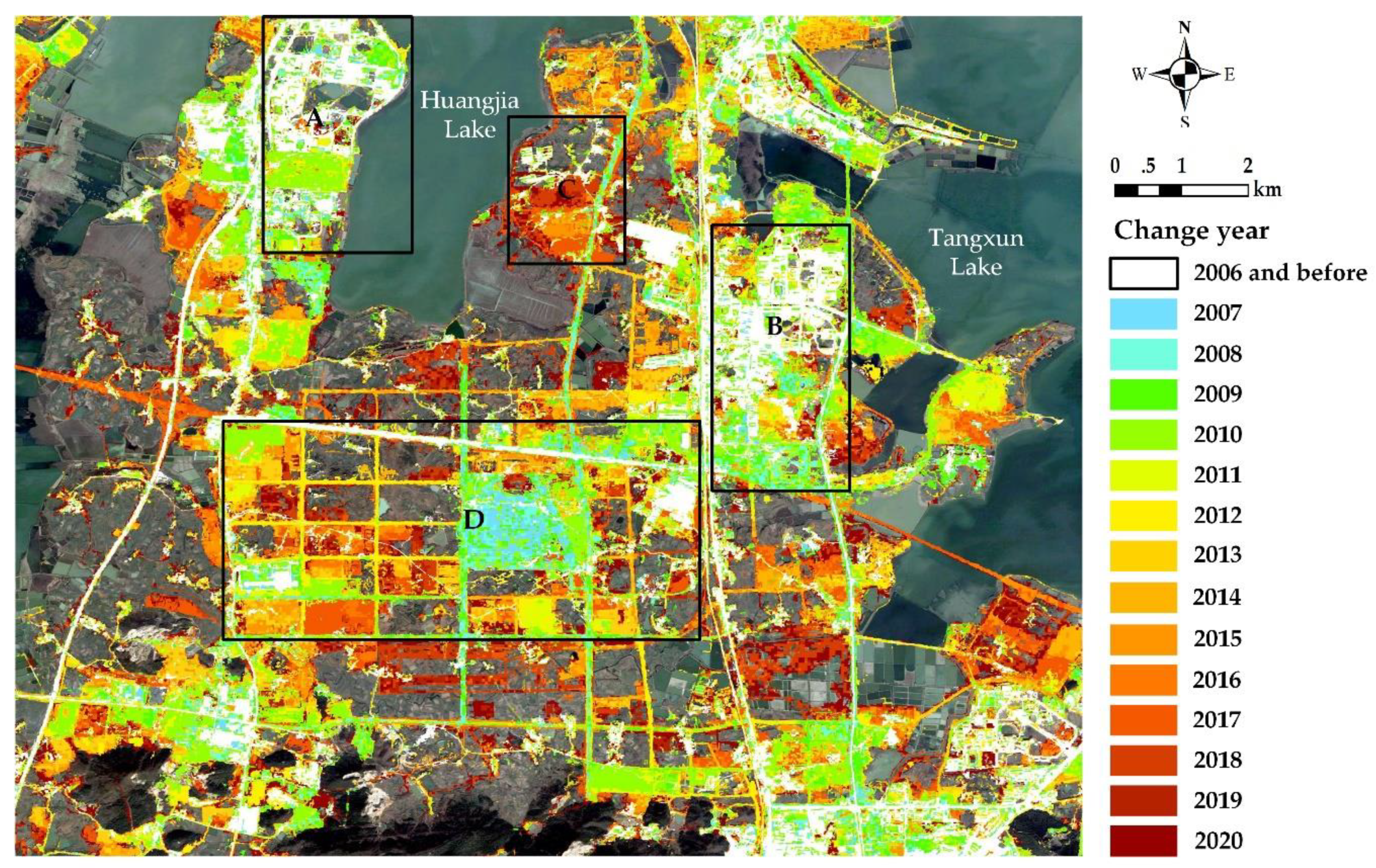
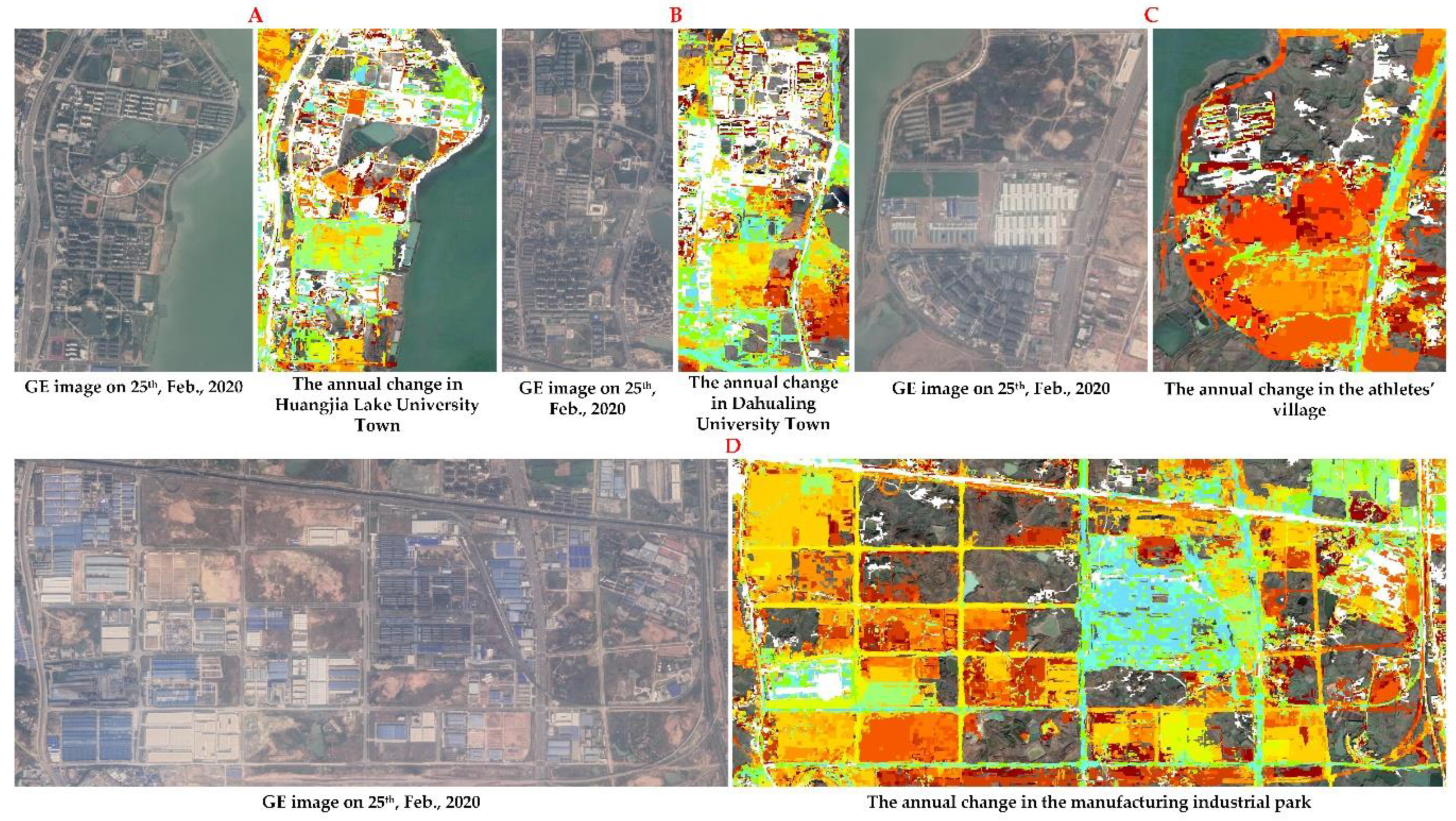
3.3. Annual Change of Impervious Surface
4. Discussion
4.1. Fine Spatial and High-Frequency Mapping of Impervious Surface at the Local Scale
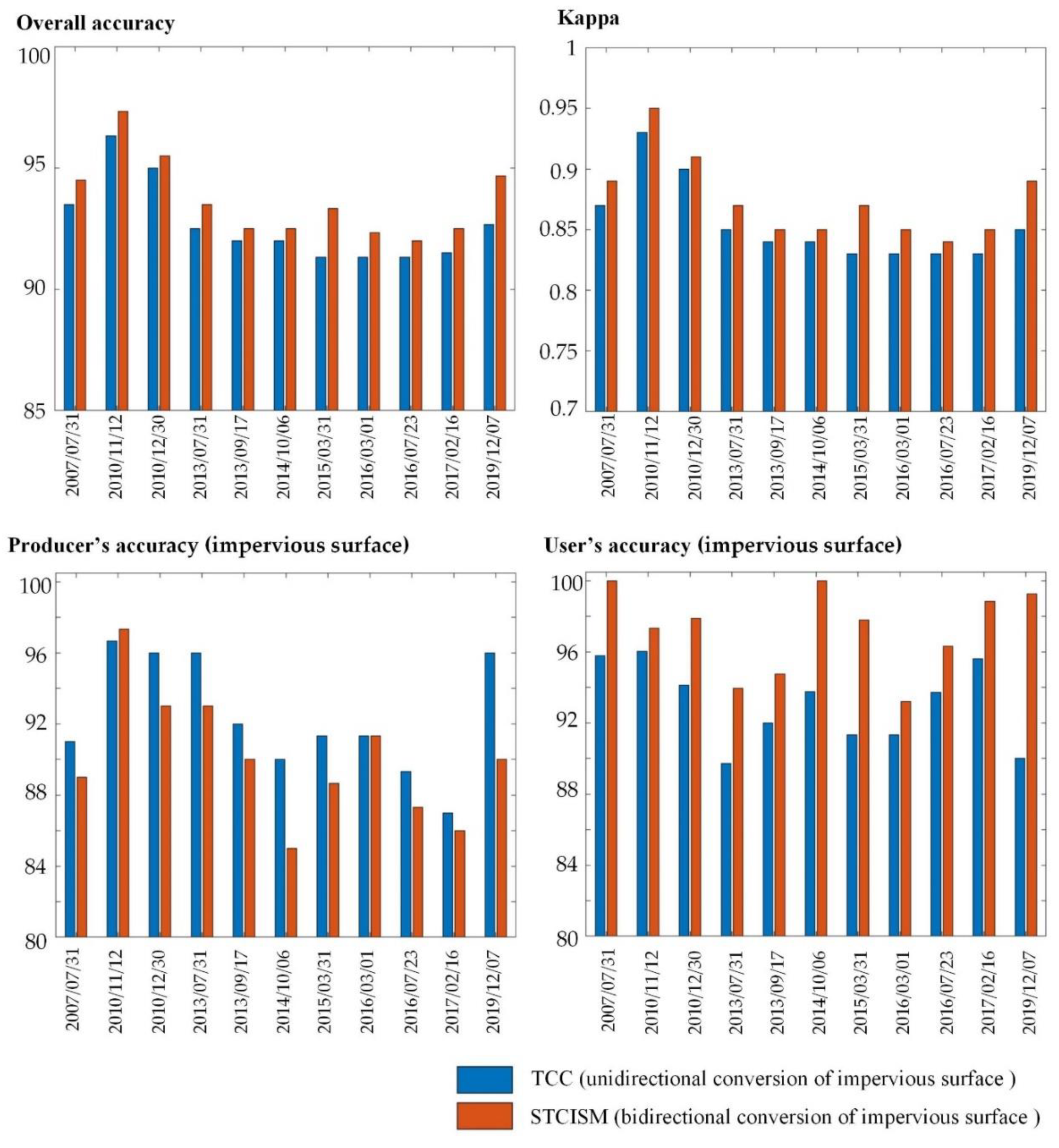
4.2. Incorporating Bidirectional Conversion in the Temporal Consistency Check in the Long-Term Mapping of Impervious Surface
4.3. Limitation and Future Work
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cai, Z.; Liu, Q.; Cao, S. Real estate supports rapid development of China’s urbanization. Land Use Policy 2020, 95, 104582. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Li, Z.; Peng, J. Impervious surface impact on water quality in the process of rapid urbanization in Shenzhen, China. Environ. Earth Sci. 2012, 68, 2365–2373. [Google Scholar] [CrossRef]
- Arnold, C.L., Jr.; Gibborns, C.J. Impervious surface coverage: The emergence of a key environmental indicator. J. Am. Plan. Assoc. 1996, 62, 243–258. [Google Scholar] [CrossRef]
- Yuan, F.; Bauer, M.E. Comparison of impervious surface area and normalized difference vegetation index as indicators of surface urban heat island effects in Landsat imagery. Remote Sens. Environ. 2007, 106, 375–386. [Google Scholar] [CrossRef]
- Hilderbrand, R.H.; Utz, R.M.; Stranko, S.A.; Raesly, R.L. Applying thresholds to forecast potential biodiversity loss from human development. J. North Am. Benthol. Soc. 2010, 29, 1009–1016. [Google Scholar] [CrossRef]
- Yu, H.; Zhao, Y.; Fu, Y.; Li, L. Spatiotemporal Variance Assessment of Urban Rainstorm Waterlogging Affected by Impervious Surface Expansion: A Case Study of Guangzhou, China. Sustainability 2018, 10, 3761. [Google Scholar] [CrossRef] [Green Version]
- Schneider, A.; Mertes, C.M. Expansion and growth in Chinese cities, 1978–2010. Environ. Res. Lett. 2014, 9, 024008. [Google Scholar] [CrossRef]
- Omurakunova, G.; Bao, A.; Xu, W.; Duulatov, E.; Jiang, L.; Cai, P.; Abdullaev, F.; Nzabarinda, V.; Durdiev, K.; Baiseitova, M. Expansion of Impervious Surfaces and Their Driving Forces in Highly Urbanized Cities in Kyrgyzstan. Int. J. Environ. Res. Public Health 2020, 17, 362. [Google Scholar] [CrossRef] [Green Version]
- Chaudhuri, A.S.; Singh, P.; Rai, S. Assessment of impervious surface growth in urban environment through remote sensing estimates. Environ. Earth Sci. 2017, 76, 1–14. [Google Scholar] [CrossRef]
- Yang, F.; Matsushita, B.; Fukushima, T. A pre-screened and normalized multiple endmember spectral mixture analysis for mapping impervious surface area in Lake Kasumigaura Basin, Japan. ISPRS J. Photogramm. Remote Sens. 2010, 65, 479–490. [Google Scholar] [CrossRef] [Green Version]
- Deng, C.; Wu, C. The use of single-date MODIS imagery for estimating large-scale urban impervious surface fraction with spectral mixture analysis and machine learning techniques. ISPRS J. Photogramm. Remote Sens. 2013, 86, 100–110. [Google Scholar] [CrossRef]
- Mertes, C.M.; Schneider, A.; Sulla-Menashe, D.; Tatem, A.J.; Tan, B. Detecting change in urban areas at continental scales with MODIS data. Remote Sens. Environ. 2015, 158, 331–347. [Google Scholar] [CrossRef]
- Wang, Z.; Gang, C.; Li, X.; Chen, Y.; Li, J. Application of a normalized difference impervious index (NDII) to extract urban impervious surface features based on Landsat TM images. Int. J. Remote Sens. 2015, 36, 1055–1069. [Google Scholar] [CrossRef]
- Deng, Y.; Fan, F.; Chen, R. Extraction and analysis of impervious surfaces based on a spectral un-mixing method using Pearl River Delta of China Landsat TM/ETM+ imagery from 1998 to 2008. Sensors 2012, 12, 1846–1862. [Google Scholar] [CrossRef] [Green Version]
- Sekertekin, A.; Abdikan, S.; Marangoz, A.M. The acquisition of impervious surface area from LANDSAT 8 satellite sensor data using urban indices: A comparative analysis. Environ. Monit. Assess. 2018, 190, 381. [Google Scholar] [CrossRef]
- Hu, T.; Yang, J.; Li, X.; Gong, P. Mapping Urban Land Use by Using Landsat Images and Open Social Data. Remote Sens. 2016, 8, 151. [Google Scholar] [CrossRef]
- Zhang, H.; Lin, H.; Wang, Y. A new scheme for urban impervious surface classification from SAR images. ISPRS J. Photogramm. Remote Sens. 2018, 139, 103–118. [Google Scholar] [CrossRef]
- Guo, W.; Lu, D.; Kuang, W. Improving Fractional Impervious Surface Mapping Performance through Combination of DMSP-OLS and MODIS NDVI Data. Remote Sens. 2017, 9, 375. [Google Scholar] [CrossRef] [Green Version]
- Bi, Q.; Qin, K.; Zhang, H.; Zhang, Y.; Li, Z.; Xu, K. A Multi-Scale Filtering Building Index for Building Extraction in Very High-Resolution Satellite Imagery. Remote Sens. 2019, 11, 482. [Google Scholar] [CrossRef] [Green Version]
- Xu, H. Rule-based impervious surface mapping using high spatial resolution imagery. Int. J. Remote Sens. 2012, 34, 27–44. [Google Scholar] [CrossRef]
- Lu, D.; Hetrick, S.; Moran, E. Impervious surface mapping with Quickbird imagery. Int. J. Remote Sens. 2011, 32, 2519–2533. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, J.; Li, P. Impervious surface extraction in urban areas from high spatial resolution imagery using linear spectral unmixing. Remote Sens. Appl. Soc. Environ. 2015, 1, 61–71. [Google Scholar] [CrossRef]
- Huang, F.; Yu, Y.; Feng, T. Automatic extraction of impervious surfaces from high resolution remote sensing images based on deep learning. J. Vis. Commun. Image Represent. 2019, 58, 453–461. [Google Scholar] [CrossRef]
- Weng, Q. Remote sensing of impervious surfaces in the urban areas: Requirements, methods, and trends. Remote Sens. Environ. 2012, 117, 34–49. [Google Scholar] [CrossRef]
- Wu, M.; Zhao, X.; Sun, Z.; Guo, H. A Hierarchical Multiscale Super-Pixel-Based Classification Method for Extracting Urban Impervious Surface Using Deep Residual Network From WorldView-2 and LiDAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 210–222. [Google Scholar] [CrossRef]
- McGlinchy, J.; Muller, B.; Johnson, B.; Joseph, M.; Diaz, J. Fully Convolutional Neural Network for Impervious Surface Segmentation in Mixed Urban Environment. Photogramm. Eng. Remote Sens. 2021, 87, 117–123. [Google Scholar] [CrossRef]
- Zhang, L.; Weng, Q.; Shao, Z. An evaluation of monthly impervious surface dynamics by fusing Landsat and MODIS time series in the Pearl River Delta, China, from 2000 to 2015. Remote Sens. Environ. 2017, 201, 99–114. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J.G. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Liu, H.; Gong, P.; Wang, J.; Wang, X.; Ning, G.; Xu, B. Production of global daily seamless data cubes and quantification of global land cover change from 1985 to 2020—iMap World 1.0. Remote Sens. Environ. 2021, 258, 112364. [Google Scholar] [CrossRef]
- Li, X.; Ling, F.; Foody, G.M.; Ge, Y.; Zhang, Y.; Du, Y. Generating a series of fine spatial and temporal resolution land cover maps by fusing coarse spatial resolution remotely sensed images and fine spatial resolution land cover maps. Remote Sens. Environ. 2017, 196, 293–311. [Google Scholar] [CrossRef]
- Wu, K.; Du, Q. Subpixel change detection of multitemporal remote sensed images using variability of endmembers. IEEE Geosci. Remote Sens. Lett. 2017, 14, 796–800. [Google Scholar] [CrossRef]
- Wang, Q.; Shi, W.; Atkinson, P.M. Spatiotemporal Subpixel Mapping of Time-Series Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5397–5411. [Google Scholar] [CrossRef]
- Zhang, Y.; Ling, F.; Foody, G.M.; Ge, Y.; Boyd, D.S.; Li, X.; Du, Y.; Atkinson, P.M. Mapping annual forest cover by fusing PALSAR/PALSAR-2 and MODIS NDVI during 2007–2016. Remote Sens. Environ. 2019, 224, 74–91. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Chen, R.; Foody, G.M.; Wang, L.; Yang, X.; Du, Y.; Ling, F. Spatio-Temporal Sub-Pixel Land Cover Mapping of Remote Sensing Imagery Using Spatial Distribution Information From Same-Class Pixels. Remote Sens. 2020, 12, 503. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Li, Y.; Wei, Y.; Chen, Z.; Xie, P. Water Body Extraction from Sentinel-3 Image with Multiscale Spatiotemporal Super-Resolution Mapping. Water 2020, 12, 2605. [Google Scholar] [CrossRef]
- Herold, M.; Roberts, D. Spectral characteristics of asphalt road aging and deterioration: Implications for remote-sensing applications. Appl. Opt. 2005, 44, 4327–4334. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Foody, G.; Yang, X.; Zhang, Y.; Du, Y.; Ling, F. Optimal endmember-based super-resolution land cover mapping. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1279–1283. [Google Scholar] [CrossRef]
- Xu, F.; Cao, X.; Chen, X.; Somers, B. Mapping impervious surface fractions using automated Fisher transformed unmixing. Remote Sens. Environ. 2019, 232, 111311. [Google Scholar] [CrossRef]
- Sugiyama, M. Dimensionality reduction of multimodal labeled data by local fisher discriminant analysis. J. Mach. Learn. Res. 2007, 8, 1027–1061. [Google Scholar]
- Shi, L.; Ling, F.; Ge, Y.; Foody, G.; Li, X.; Wang, L.; Zhang, Y.; Du, Y. Impervious Surface Change Mapping with an Uncertainty-Based Spatial-Temporal Consistency Model: A Case Study in Wuhan City Using Landsat Time-Series Datasets from 1987 to 2016. Remote Sens. 2017, 9, 1148. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Gong, P.; Liang, L. A 30-year (1984–2013) record of annual urban dynamics of Beijing City derived from Landsat data. Remote Sens. Environ. 2015, 166, 78–90. [Google Scholar] [CrossRef]
- Gong, P.; Li, X.; Zhang, W. 40-Year (1978–2017) human settlement changes in China reflected by impervious surfaces from satellite remote sensing. Sci. Bull. 2019, 64, 756–763. [Google Scholar] [CrossRef] [Green Version]
- Ge, Y.; Jin, Y.; Stein, A.; Chen, Y.; Wang, J.; Wang, J.; Cheng, Q.; Bai, H.; Liu, M.; Atkinson, P.M. Principles and methods of scaling geospatial Earth science data. Earth Sci. Rev. 2019, 197, 102897. [Google Scholar] [CrossRef]
- Sanford, S.W.; Maryville, M. A Technique for Mapping Urban Areas and Change Using Integrated Remote Sensing and Dasymetric Population Mapping Methods. Master’s Thesis, Northwest Missouri State University, Maryville, MO, USA, 2011. [Google Scholar]
- Diaz-Pacheco, J.; Gutiérrez, J. Exploring the limitations of CORINE Land Cover for monitoring urban land-use dynamics in metropolitan areas. J. Land Use Sci. 2013, 9, 243–259. [Google Scholar] [CrossRef]
- Miyazaki, H.; Iwao, K.; Shibasaki, R. Development of a New Ground Truth Database for Global Urban Area Mapping from a Gazetteer. Remote Sens. 2011, 3, 1177–1187. [Google Scholar] [CrossRef] [Green Version]
- Banzhaf, E.; Grescho, V.; Kindler, A. Monitoring urban to peri-urban development with integrated remote sensing and GIS information: A Leipzig, Germany case study. Int. J. Remote Sens. 2009, 30, 1675–1696. [Google Scholar] [CrossRef]
- Fu, Y.; Li, J.; Weng, Q.; Zheng, Q.; Li, L.; Dai, S.; Guo, B. Characterizing the spatial pattern of annual urban growth by using time series Landsat imagery. Sci. Total Environ. 2019, 666, 274–284. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, G.L.; Jenkerson, C.; Masek, J.G.; Vermote, E.; Gao, F. Landsat Ecosystem Disturbance Adaptive Processing System (LEDAPS) Algorithm Description; U.S. Geological Survey: Reston, VA, USA, 2013. [Google Scholar]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef]
- Salehi, B.; Zhang, Y.; Zhong, M.; Dey, V. Object-Based Classification of Urban Areas Using VHR Imagery and Height Points Ancillary Data. Remote Sens. 2012, 4, 2256–2276. [Google Scholar] [CrossRef] [Green Version]
- Yu, Q.; Gong, P.; Clinton, N.; Biging, G.; Kelly, M.; Schirokauer, D. Object-based detailed vegetation classification with airborne high spatial resolution remote sensing imagery. Photogramm. Eng. Remote Sens. 2006, 72, 799–811. [Google Scholar] [CrossRef] [Green Version]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Sexton, J.O.; Song, X.-P.; Huang, C.; Channan, S.; Baker, M.E.; Townshend, J.R. Urban growth of the Washington, D.C.–Baltimore, MD metropolitan region from 1984 to 2010 by annual, Landsat-based estimates of impervious cover. Remote Sens. Environ. 2013, 129, 42–53. [Google Scholar] [CrossRef]
- Killick, R.; Fearnhead, P.; Eckley, I.A. Optimal detection of changepoints with a linear computational cost. J. Am. Stat. Assoc. 2012, 107, 1590–1598. [Google Scholar] [CrossRef]
- Lavielle, M. Using penalized contrasts for the change-point problem. Signal Process. 2005, 85, 1501–1510. [Google Scholar] [CrossRef] [Green Version]
- Gong, P.; Li, X.; Wang, J.; Bai, Y.; Chen, B.; Hu, T.; Liu, X.; Xu, B.; Yang, J.; Zhang, W.; et al. Annual maps of global artificial impervious area (GAIA) between 1985 and 2018. Remote Sens. Environ. 2020, 236, 111510. [Google Scholar] [CrossRef]
- Liu, X.; Hu, G.; Chen, Y.; Li, X.; Xu, X.; Li, S.; Pei, F.; Wang, S. High-resolution multi-temporal mapping of global urban land using Landsat images based on the Google Earth Engine Platform. Remote Sens. Environ. 2018, 209, 227–239. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, L.; Wu, C.; Chen, X.; Gao, Y.; Xie, S.; Zhang, B. Development of a global 30 m impervious surface map using multisource and multitemporal remote sensing datasets with the Google Earth Engine platform. Earth Syst. Sci. Data 2020, 12, 1625–1648. [Google Scholar] [CrossRef]
- Stehman, S.V. Sampling designs for accuracy assessment of land cover. Int. J. Remote Sens. 2009, 30, 5243–5272. [Google Scholar] [CrossRef]
- Long, Y.; Gu, Y.; Han, H. Spatiotemporal heterogeneity of urban planning implementation effectiveness: Evidence from five urban master plans of Beijing. Landsc. Urban Plan. 2012, 108, 103–111. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Image Date | Prediction Date | OA (%) | PA (%) (IMP) | UA (%) (IMP) | Kappa | ||||
|---|---|---|---|---|---|---|---|---|---|
| Bayesian-STSRM | STCISM | Bayesian-STSRM | STCISM | Bayesian-STSRM | STCISM | Bayesian-STSRM | STCISM | ||
| 2007/11/27 | 2007/07/31 | 93.50 | 94.50 | 89.00 | 89.00 | 97.80 | 100.00 | 0.87 | 0.89 |
| 2010/11/30 | 2010/11/12 | 95.67 | 97.33 | 96.67 | 97.33 | 94.77 | 97.33 | 0.91 | 0.95 |
| 2010/12/07 | 2010/12/30 | 95.00 | 95.50 | 92.00 | 93.00 | 97.87 | 97.89 | 0.90 | 0.91 |
| 2013/07/24 | 2013/07/31 | 92.50 | 93.50 | 92.00 | 93.00 | 92.93 | 93.94 | 0.85 | 0.87 |
| 2013/08/16 | 2013/09/17 | 91.50 | 92.50 | 88.00 | 90.00 | 94.62 | 94.74 | 0.83 | 0.85 |
| 2014/08/05 | 2014/10/06 | 91.50 | 92.50 | 84.00 | 85.00 | 98.82 | 100.00 | 0.83 | 0.85 |
| 2015/01/21 | 2015/03/31 | 91.00 | 93.33 | 84.67 | 88.67 | 96.95 | 97.79 | 0.82 | 0.87 |
| 2016/02/20 | 2016/03/01 | 91.33 | 92.33 | 89.33 | 91.33 | 93.06 | 93.20 | 0.83 | 0.85 |
| 2016/07/29 | 2016/07/23 | 91.33 | 92.00 | 87.33 | 87.33 | 94.93 | 96.32 | 0.83 | 0.84 |
| 2017/04/23 | 2017/02/16 | 91.00 | 92.50 | 84.00 | 86.00 | 97.67 | 98.85 | 0.82 | 0.85 |
| 2019/12/11 | 2019/12/07 | 94.00 | 94.67 | 88.67 | 90.00 | 99.25 | 99.26 | 0.88 | 0.89 |
| Average | 92.58 | 93.70 | 88.70 | 90.06 | 96.24 | 97.21 | 0.85 | 0.87 | |
| Reference Image Date | Prediction Date | Impervious Surface Map | OA (%) | PA (%) (IMP) | UA (%) (IMP) | Kappa |
|---|---|---|---|---|---|---|
| 2010/11/30 | 2010/11/12 | NUACI | 79.33 | 72.00 | 84.38 | 0.59 |
| GAIA | 79.33 | 65.33 | 90.75 | 0.59 | ||
| STCISM | 97.33 | 97.33 | 97.33 | 0.95 | ||
| 2016/02/20 | 2015/10/25 | MSMT | 76.67 | 60.00 | 90.00 | 0.53 |
| GAIA | 70.33 | 74.00 | 68.94 | 0.41 | ||
| STCISM | 92.33 | 91.33 | 93.20 | 0.85 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, R.; Li, X.; Zhang, Y.; Zhou, P.; Wang, Y.; Shi, L.; Jiang, L.; Ling, F.; Du, Y. Spatiotemporal Continuous Impervious Surface Mapping by Fusion of Landsat Time Series Data and Google Earth Imagery. Remote Sens. 2021, 13, 2409. https://doi.org/10.3390/rs13122409
Chen R, Li X, Zhang Y, Zhou P, Wang Y, Shi L, Jiang L, Ling F, Du Y. Spatiotemporal Continuous Impervious Surface Mapping by Fusion of Landsat Time Series Data and Google Earth Imagery. Remote Sensing. 2021; 13(12):2409. https://doi.org/10.3390/rs13122409
Chicago/Turabian StyleChen, Rui, Xiaodong Li, Yihang Zhang, Pu Zhou, Yalan Wang, Lingfei Shi, Lai Jiang, Feng Ling, and Yun Du. 2021. "Spatiotemporal Continuous Impervious Surface Mapping by Fusion of Landsat Time Series Data and Google Earth Imagery" Remote Sensing 13, no. 12: 2409. https://doi.org/10.3390/rs13122409
APA StyleChen, R., Li, X., Zhang, Y., Zhou, P., Wang, Y., Shi, L., Jiang, L., Ling, F., & Du, Y. (2021). Spatiotemporal Continuous Impervious Surface Mapping by Fusion of Landsat Time Series Data and Google Earth Imagery. Remote Sensing, 13(12), 2409. https://doi.org/10.3390/rs13122409