
Vegetation Filtering of a Steep Rugged Terrain: The Performance of Standard Algorithms and a Newly Proposed Workflow on an Example of a Railway Ledge


Abstract
:
1. Introduction
2. Materials and Methods
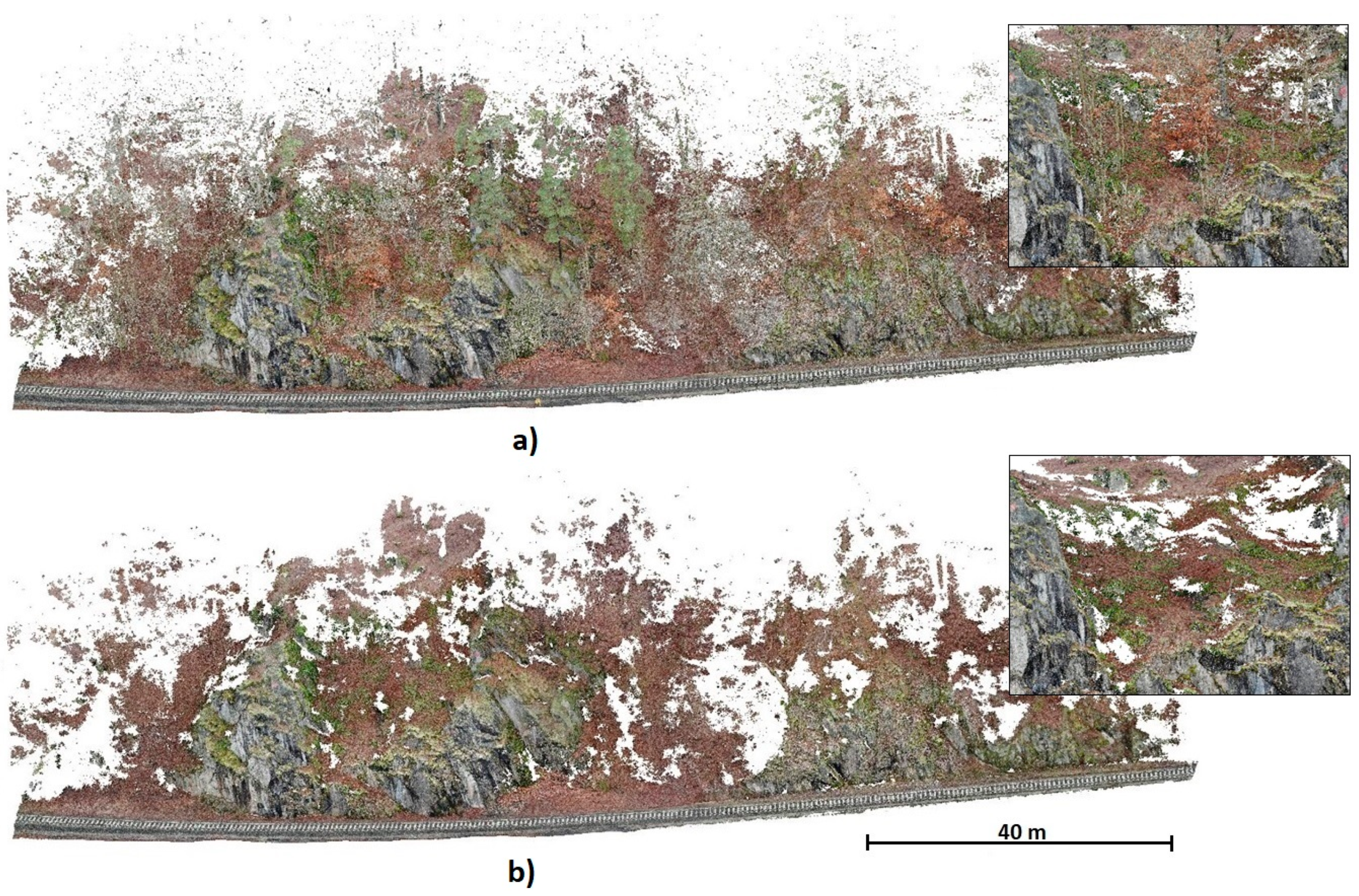
2.1. Data for Testing
2.2. Used Ground Filtering Algorithms
2.3. Filter Application on Levelled Data
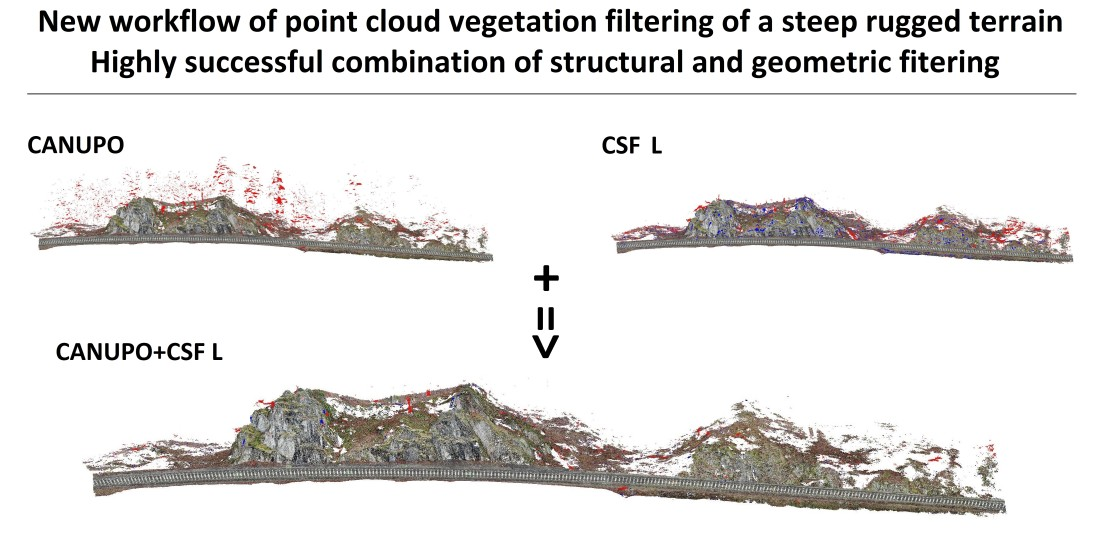
2.4. The Proposed New Workflow Combining CANUPO and a Geometric Filter
2.5. Filter Quality Evaluation
- Application of the particular algorithm on the testing data (dataorig) with chosen settings (resulting in the acquisition of the datafiltered).
- Determination of a Type I error by the evaluation of the distance from the filtered (datafiltered) to the reference manually cleaned (dataref) point cloud in CloudCompare.
- Determination of a Type II error by evaluating the distance from the manually cleaned reference data (dataref) to the datafiltered in CloudCompare.
- Calculation of the evaluation criteria.
- Steps 1–4 are repeated for all tested filters and settings variations and the resulting evaluation criteria are compared.
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Axelsson, P. DEM Generation from Laser Scanner Data Using adaptive TIN Models. Int. Arch. Photogramm. Remote Sens. 2000, 23, 110–117. [Google Scholar] [CrossRef]
- Meng, X.; Wang, L.; Silván-Cárdenas, J.L.; Currit, N. A multi-directional ground filtering algorithm for airborne LIDAR. ISPRS J. Photogramm. Remote Sens. 2009, 64, 117–124. [Google Scholar] [CrossRef] [Green Version]
- Rashidi, P.; Rastiveis, H. Ground filtering LiDAR data based on multi-scale analysis of height difference threshold. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. Isprs Arch. 2017, 42, 225–229. [Google Scholar] [CrossRef] [Green Version]
- Susaki, J. Adaptive Slope Filtering of Airborne LiDAR Data in Urban Areas for Digital Terrain Model (DTM) Generation. Remote Sens. 2012, 4, 1804–1819. [Google Scholar] [CrossRef] [Green Version]
- Shi, X.; Ma, H.; Chen, Y.; Zhang, L.; Zhou, W. A parameter-free progressive TIN densification filtering algorithm for lidar point clouds. Int. J. Remote Sens. 2018, 39, 6969–6982. [Google Scholar] [CrossRef]
- Li, Y.; Wang, J.; Li, B.; Sun, W.; Li, Y. An adaptive filtering algorithm of multilevel resolution point cloud. Surv. Rev. 2021, 53, 300–311. [Google Scholar] [CrossRef]
- Kumar, B.; Yadav, M.; Lohani, B.; Singh, A.K. A two-stage algorithm for ground filtering of airborne laser scanning data. Int. J. Remote Sens. 2018, 39, 6757–6783. [Google Scholar] [CrossRef]
- Wei, L.; Yang, B.; Jiang, J.; Cao, G.; Wu, M. Vegetation filtering algorithm for UAV-borne lidar point clouds: A case study in the middle-lower Yangtze River riparian zone. Int. J. Remote Sens. 2017, 38, 2991–3002. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, S.C.; Whitman, D.; Shyu, M.L.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef] [Green Version]
- Pingel, T.J.; Clarke, K.C.; McBride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Kovanič, Ľ.; Blistan, P.; Urban, R.; Štroner, M.; Blišťanová, M.; Bartoš, K.; Pukanská, K. Analysis of the Suitability of High-Resolution DEM Obtained Using ALS and UAS (SfM) for the Identification of Changes and Monitoring the Development of Selected Geohazards in the Alpine Environment—A Case Study in High Tatras, Slovakia. Remote Sens. 2020, 12, 3901. [Google Scholar] [CrossRef]
- Jon, J.; Koska, B.; Pospíšil, J. Autonomous Airship Equipped with Multi-Sensor Mapping Platform. ISPRS International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2013, 40, 119–124. [Google Scholar] [CrossRef] [Green Version]
- Kalvoda, P.; Nosek, J.; Kuruc, M.; Volařík, T.; Kalvodova, P. Accuracy Evaluation and Comparison of Mobile Laser Scanning and Mobile Photogrammetry Data. In IOP Conference Series: Earth and Environ-Mental Science; IOP Publishing Ltd.: Bristol, UK, 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Šedina, J.; Hůlková, M.; Pavelka, K.; Pavelka, K., Jr. RPAS for documentation of Nazca aqueducts. Eur. J. Remote Sens. 2019, 52, 174–181. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.Y.; Chen, Y.Q.; Yang, L. Small unmanned aerial vehicles for low-altitude remote sensing and its application progress in ecology. J. Appl. Ecol. 2017, 28, 528–536. [Google Scholar] [CrossRef]
- Urban, R.; Štroner, M.; Blistan, P.; Kovanič, Ľ.; Patera, M.; Jacko, S.; Ďuriška, I.; Kelemen, M.; Szabo, S. The Suitability of UAS for Mass Movement Monitoring Caused by Torrential Rainfall—A Study on the Talus Cones in the Alpine Terrain in High Tatras, Slovakia. ISPRS Int. J. Geo-Inf. 2019, 8, 317. [Google Scholar] [CrossRef] [Green Version]
- Peppa, M.V.; Mills, J.P.; Moore, P.; Miller, P.E.; Chambers, J.E. Brief communication: Landslide motion from cross correlation of UAV-derived morphological attributes. Nat. Hazards Earth Syst. Sci. 2017, 17, 2143–2150. [Google Scholar] [CrossRef] [Green Version]
- Salvini, R.; Mastrorocco, G.; Esposito, G.; Di Bartolo, S.; Coggan, J.; Vanneschi, C. Use of a remotely piloted aircraft system for hazard assessment in a rocky mining area (Lucca, Italy). Nat. Hazards Earth Syst. Sci. 2018, 18, 287–302. [Google Scholar] [CrossRef] [Green Version]
- Moudrý, V.; Beková, A.; Lagner, O. Evaluation of a high resolution UAV imagery model for rooftop solar irradiation estimates. Remote Sens. Lett. 2018, 10, 1077–1085. [Google Scholar] [CrossRef]
- Klouček, T.; Komárek, J.; Surový, P.; Hrach, K.; Janata, P.; Vašíček, B. The Use of UAV Mounted Sensors for Precise Detection of Bark Beetle Infestation. Remote Sens. 2019, 11, 1561. [Google Scholar] [CrossRef] [Green Version]
- Komárek, J.; Klouček, T.; Prošek, J. The potential of Unmanned Aerial Systems: A tool towards precision classification of hard-to-distinguish vegetation types? Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 9–19. [Google Scholar] [CrossRef]
- Park, S.; Choi, Y. Applications of Unmanned Aerial Vehicles in Mining from Exploration to Reclamation: A Review. Minerals 2020, 10, 663. [Google Scholar] [CrossRef]
- Urban, R.; Štroner, M.; Kuric, I. The use of onboard UAV GNSS navigation data for area and volume calculation. Acta Montan. Slovaca 2020, 25, 361–374. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK Method—An Optimal Solution for Mapping Inaccessible Forested Areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef] [Green Version]
- Blistan, P.; Kovanič, Ľ.; Patera, M.; Hurčík, T. Evaluation quality parameters of DEM generated with low-cost UAV photogrammetry and Structure-from-Motion (SfM) approach for topographic surveying of small areas. Acta Montan. Slovaca 2019, 24, 198–212. [Google Scholar]
- Santise, M.; Fornari, M.; Forlani, G.; Roncella, R. Evaluation of DEM generation accuracy from UAS imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-5, 529–536. [Google Scholar] [CrossRef] [Green Version]
- Pukanská, K.; Bartoš, K.; Bella, P.; Gašinec, J.; Blistan, P.; Kovanič, Ľ. Surveying and High-Resolution Topography of the Ochtiná Aragonite Cave Based on TLS and Digital Photogrammetry. Appl. Sci. 2020, 10, 4633. [Google Scholar] [CrossRef]
- Koska, B.; Křemen, T. The Combination of Laser Scanning and Structure from Motion Technology for Creation of Accurate Exterior and Interior Orthophotos of St. Nicholas Baroque Church. ISPRS International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2013, 40, 133–138. [Google Scholar] [CrossRef] [Green Version]
- Tinkham, W.T.; Huang, H.; Smith, A.M.S.; Shrestha, R.; Falkowski, M.J.; Hudak, A.T.; Link, T.E.; Glenn, N.F.; Marks, D.G. A Comparison of Two Open Source LiDAR Surface Classification Algorithms. Remote Sens. 2011, 3, 638–649. [Google Scholar] [CrossRef] [Green Version]
- Klápště, P.; Fogl, M.; Barták, V.; Gdulová, K.; Urban, R.; Moudrý, V. Sensitivity analysis of parameters and contrasting performance of ground filtering algorithms with UAV photogrammetry-based and LiDAR point clouds. Int. J. Digit. Earth 2020, 13, 1672–1694. [Google Scholar] [CrossRef]
- Moudrý, V.; Klápště, P.; Fogl, M.; Gdulová, K.; Barták, V.; Urban, R. Assessment of LiDAR ground filtering algorithms for determining ground surface of non-natural terrain overgrown with forest and steppe vegetation. Measurement 2020, 150. [Google Scholar] [CrossRef]
- Montealegre, A.L.; Lamelas, M.T.; De La Riva, J. A Comparison of Open Source LiDAR Filtering Algorithms in a Mediterranean Forest Environment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4072–4085. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, C.S.; Yilmaz, V.; Güngör, O. Investigating the performances of commercial and non-commercial software for ground filtering of UAV-based point clouds. Int. J. Remote Sens. 2018, 39, 5016–5042. [Google Scholar] [CrossRef]
- Stereńczak, K.; Ciesielski, M.; Bałazy, R.; Zawiła-Niedźwiecki, T. Comparison of various algorithms for DTM interpolation from LIDAR data in dense mountain forests. Eur. J. Remote Sens. 2016, 49, 599–621. [Google Scholar] [CrossRef]
- Silva, C.A.; Klauberg, C.; Hentz, A.M.K.; Corte, A.P.D.; Ribeiro, U.; Liesenberg, V. Comparing the performance of ground filtering algorithms for terrain modeling in a forest environment using airborne LiDAR data. Floresta Ambient. 2018, 25. [Google Scholar] [CrossRef] [Green Version]
- Cai, S.; Zhang, W.; Liang, X.; Wan, P.; Qi, J.; Yu, S.; Yan, G.; Shao, J. Filtering Airborne LiDAR Data Through Complementary Cloth Simulation and Progressive TIN Densification Filters. Remote Sens. 2019, 11, 1037. [Google Scholar] [CrossRef] [Green Version]
- Polat, N.; Uysal, M. Investigating performance of Airborne LiDAR data filtering algorithms for DTM generation. Measurement 2015, 63, 61–68. [Google Scholar] [CrossRef]
- Brodu, N.; Lague, D. 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: Applications in geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Parameter | Values |
|---|---|---|
| PMF | Cell size (m) | 0.1; 0.3; 0.5; 1.0 |
| Initial distance (m) | 0.10; 0.5; 1.0 | |
| Max distance (m) | 0.5; 1.0; 2.5 | |
| Max window size (m) | 1.0; 5.0; 10.0 | |
| Slope | 1.0; 3.0; 5.0; 10.0 | |
| Exponential | Yes | |
| SMRF | Cell (m) | 0.05; 0.1; 0.3; 0.5; 1.0; 2.0 |
| Scalar (m) | 0.5; 1.0; 1.25; 2.5; 5.0 | |
| Slope | 0.15; 1.0; 3.0; 5.0; 10.0 | |
| Threshold (m) | 0.05; 0.1; 0.25; 0.5; 1.0 | |
| Window (m) | 20.0; 10.0; 5.0 | |
| CSF | Cloth resolution (m) | 0.1; 0.2; 0.3; 0.4; 0.5; 0.75; 1.0 |
| Classification threshold (m) | 0.1; 0.2; 0.3; 0.4; 0.5; 0.75; 1.0; 2.0; 2.5 | |
| Scene | Steep slope | |
| Slope processing | Yes | |
| Max iterations | 500 |
| Method | Parameter | Optimal Value | Type I Error (%) | Type II Error (%) | Total Error (%) |
|---|---|---|---|---|---|
| PMF | Cell size | 0.5 | 1.7 | 58.4 | 60.1 |
| Initial distance | 1.0 | ||||
| Max distance | 1.0 | ||||
| Max window size | 1.0 | ||||
| Slope | 1.0 | ||||
| SMRF | Cell | 0.3 | 8.8 | 3.0 | 11.8 |
| Scalar | 1.0 | ||||
| Slope | 10.0 | ||||
| Threshold | 1.0 | ||||
| Window | 10.0 | ||||
| CSF | Cloth resolution | 0.1 | 7.1 | 8.9 | 16.0 |
| Classification threshold | 2.0 | ||||
| CANUPO | - | - | 3.6 | 0.3 | 3.9 |
| Method | Parameter | Optimal Value | Type I Error (%) | Type II Error (%) | Total Error (%) |
|---|---|---|---|---|---|
| PMF | Cell size | 0.5 | 3.8 | 26.7 | 30.7 |
| Initial distance | 1 | ||||
| Max distance | 1 | ||||
| Max window size | 1 | ||||
| Slope | 1 | ||||
| SMRF | Cell | 0.3 | 6.1 | 1.5 | 7.6 |
| Scalar | 0.5 | ||||
| Slope | 5.0 | ||||
| Threshold | 0.25 | ||||
| Window | 10.0 | ||||
| CSF | Cloth resolution | 0.1 | 4.4 | 1.8 | 6.2 |
| Classification threshold | 0.1 | ||||
| CANUPO+PMF | Cell size | 0.5 | 0.5 | 10.4 | 10.9 |
| Initial distance | 1 | ||||
| Max distance | 1 | ||||
| Max window size | 1 | ||||
| Slope | 1 | ||||
| CANUPO+CSF | Cloth resolution | 0.2 | 0.5 | 0.4 | 0.9 |
| Classification threshold | 1.0 | ||||
| CANUPO+SMRF | Cell | 0.3 | 0.7 | 0.5 | 1.2 |
| Scalar | 0.5 | ||||
| Slope | 3.0 | ||||
| Threshold | 0.5 | ||||
| Window | 10.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Štroner, M.; Urban, R.; Lidmila, M.; Kolář, V.; Křemen, T. Vegetation Filtering of a Steep Rugged Terrain: The Performance of Standard Algorithms and a Newly Proposed Workflow on an Example of a Railway Ledge. Remote Sens. 2021, 13, 3050. https://doi.org/10.3390/rs13153050
Štroner M, Urban R, Lidmila M, Kolář V, Křemen T. Vegetation Filtering of a Steep Rugged Terrain: The Performance of Standard Algorithms and a Newly Proposed Workflow on an Example of a Railway Ledge. Remote Sensing. 2021; 13(15):3050. https://doi.org/10.3390/rs13153050
Chicago/Turabian StyleŠtroner, Martin, Rudolf Urban, Martin Lidmila, Vilém Kolář, and Tomáš Křemen. 2021. "Vegetation Filtering of a Steep Rugged Terrain: The Performance of Standard Algorithms and a Newly Proposed Workflow on an Example of a Railway Ledge" Remote Sensing 13, no. 15: 3050. https://doi.org/10.3390/rs13153050
APA StyleŠtroner, M., Urban, R., Lidmila, M., Kolář, V., & Křemen, T. (2021). Vegetation Filtering of a Steep Rugged Terrain: The Performance of Standard Algorithms and a Newly Proposed Workflow on an Example of a Railway Ledge. Remote Sensing, 13(15), 3050. https://doi.org/10.3390/rs13153050