1. Introduction
High-resolution and wide-swath (HRWS) imaging has become an important trend for the synthetic aperture radar (SAR) technique [
1,
2,
3,
4,
5], which is conducive to many fields such as continuous earth surface observation [
6], moving target indication [
7], and maritime reconnaissance [
8]. However, for the traditional single-channel SAR system, low pulse repetition frequency (PRF) is required to obtain a wide swath image, which conflicts with the high RPF that is required in azimuth to avoid ambiguity. To solve this contradiction, the multichannel SAR technique was proposed [
9]. One of the channels transmits the signals with low PRF to ensure a wide swath, and all channels that are set up along the track receive signals simultaneously to increase the PRF of the multichannel system. When the PRF of the SAR system, platform speed
v, and the channel space
d satisfy the uniform sampling condition, that is,
, the echo of each channel can be directly combined, which equals to the uniformly sampled data collected by a single-channel SAR system with
. Thus, the equivalent azimuth PRF of the multichannel system is increased, which can perform azimuth high-resolution imaging without ambiguity and ensures the range wide swath. Unfortunately, in practice, due to factors such as the avoidance of nadir echo, the improvement of the azimuth resolution, and the attitude change of the flight platform [
9,
10], the system parameters will deviate from the ideal values that satisfy the uniform sampling conditions. It forms periodically nonuniform sampling in azimuth and the azimuth ambiguity image will be obtained directly using the multichannel data. To solve this problem, numerous reconstruction methods have been extensively studied to recover the uniformly sampled signal from the periodic non-uniformly sampled signal. In [
9,
11], Krieger and Gebert et al. developed the filter bank reconstruction. To increase the robustness of the reconstruction, in [
12,
13] Li et al. proposed an adaptive reconstruction method based on the space-time adaptive processing approach. In addition, considering the good performance of maneuvering platforms SAR [
14,
15,
16,
17,
18], the image domain reconstruction (IDR) method was proposed to deal with the curved trajectory HRWS SAR [
19]. However, due to the change of channel characteristics affected by temperature and the hardware differences of each channel, the multichannel SAR system usually suffers from the amplitude errors and the phase errors [
20,
21]. They significantly degrade the performance of the reconstruction methods, resulting in the azimuth ambiguity.
To improve the multichannel reconstruction image quality, numerous amplitude and the phase errors calibration methods have been proposed to calibrate channel errors in the literature [
2,
4,
20,
22,
23]. A time-domain phase mismatch calibration based on the azimuth cross correlation was proposed [
24], which derived the phase mismatches from the phase of the cross-correlation function. However, when the Doppler center cannot be accurately provided in advance, it affects the performance of phase calibration. To solve this problem, a spatial cross correlation coefficient method was proposed to estimate the Doppler center for the multichannel HRWS SAR [
25], which can calibrate the channel phase mismatch. However, due to the spatial correlation operation, the proposed method may be invalid when the clutter-to-noise ratio (CNR) is relatively low. In addition, subspace-based techniques have also been extensively studied. In [
22], Li et al. proposed an orthogonal subspace method (OSM) based on the orthogonality of the signal subspace and the noise subspace to estimate channel phase error. To reduce the computational burden and improve accuracy, Yang et al. proposed a signal subspace comparison method [
26], which is based on the fact that the signal subspace is equal to space spanned by the practical steering vectors. It requires only one matrix inverse operation compared with OSM, which improves efficiency. However, those subspace-based techniques require at least one redundant channel, which aggravates the multichannel system complexity. Besides, the performance of the phase error estimation suffers a severe degradation in the case of relatively low signal-to-noise ratio (SNR). To address this issue, in [
4], Zhang et al. proposed a robust channel phase error calibration algorithm via maximizing the minimum variance distortionless response (MVDR) beamformer output power, which reduces the computation load by utilizing the inverse of the covariance matrix in place of subspaces to construct the optimization function. In [
21], another optimization method based on the power maximization criterion was proposed to estimate phase error, which avoids the signal leakage in the low SNR case without the matrix eigenvalue decomposition. In [
20], Zhang et al. proposed a robust channel-calibration algorithm based on minimum entropy, which obtained channel phase errors in all range blocks for the range variant phase mismatch by utilizing local maximum-likelihood (LML) estimation.
Besides, the mechanical manufacturing error and measurement error make the baseline inaccurate [
27], which also seriously affects the reconstruction quality. Since the channel phase calibration algorithms cannot directly solve the influence of the baseline error, the baseline error estimation becomes one of the key problems for the HRWS SAR imaging. Baseline error estimation methods were widely studied based on the interferometric phase for multichannel GMTI-SAR systems [
28,
29]. The effective baseline estimation was proposed via calculating the interferometric phase in the 2-D frequency domain to deal with the baseline deviation of the Chinese Gaofen-3 SAR system [
30]. By exploiting the slope of the linear interferometric phase ramp via eigen decomposition of the sample covariance matrix, the eigen-decomposition-based (EDB) method has been proposed to estimate the along-track baseline [
31,
32]. However, due to the Doppler ambiguity, the methods for GMTI may be invalid for the HRWS SAR baseline error estimation. In [
33], a baseline estimation method was developed from the correlation function between the echoes of adjective channel for HRWS SAR. However, it may increase the noise components and create a number of cross terms [
27]. Huang has proposed an along-track baseline estimation method by using the iterative adaptive approach [
27]. Although this method is robust to the amplitude and phase errors, it may be invalid in the case of a relatively low clutter-to-noise ratio because of the spatial correlation operation.
Taking amplitude error, phase error, and baseline error into consideration, in this paper, a novel sub-image local area minimum entropy reconstruction method (SILAMER) is proposed. The proposed method consists of three steps: sub-images generation, reconstruction coefficient and compensation phase estimation, and unambiguous reconstruction. First, according to the idea of image domain reconstruction, the sub-images are generated by employing the back-projection algorithm [
34,
35]. During the sub-images imaging, due to the coherent accumulation, the nonlinear motion of the SAR platform can be accurately compensated. Then, we propose an estimation algorithm to estimate the reconstruction coefficient and the compensation phase, where a local area of the sub-image is used as the estimation input to improve the efficiency. For the estimation algorithm, as the closed form-solution based on minimum image entropy criteria cannot be obtained [
20], the conjugate gradient method is used to solve the optimization problem, which is to minimize the entropy of the reconstructed image through iteration. Finally, the sub-images are weighted by the estimated reconstruction coefficient and corrected by the compensation phase to obtain the unambiguous reconstructed image.
The main contributions of this paper are as follows:
The proposed method can simultaneously correct amplitude error, baseline error, and phase error by estimating the reconstruction coefficient and compensation phase. It is a new strategy to adaptively reconstruct the sub-images based on minimum image entropy through iteration. It has favorable adaptability to the HRWS SAR system with various errors.
To improve the efficiency of estimating the reconstruction coefficient and the compensation phase, it selects a local area of each sub-image as the input of the estimation method. As the imaging scene of multi-channel SAR is extremely wide, the proposed algorithm using the local area for estimation will greatly improve the estimation efficiency.
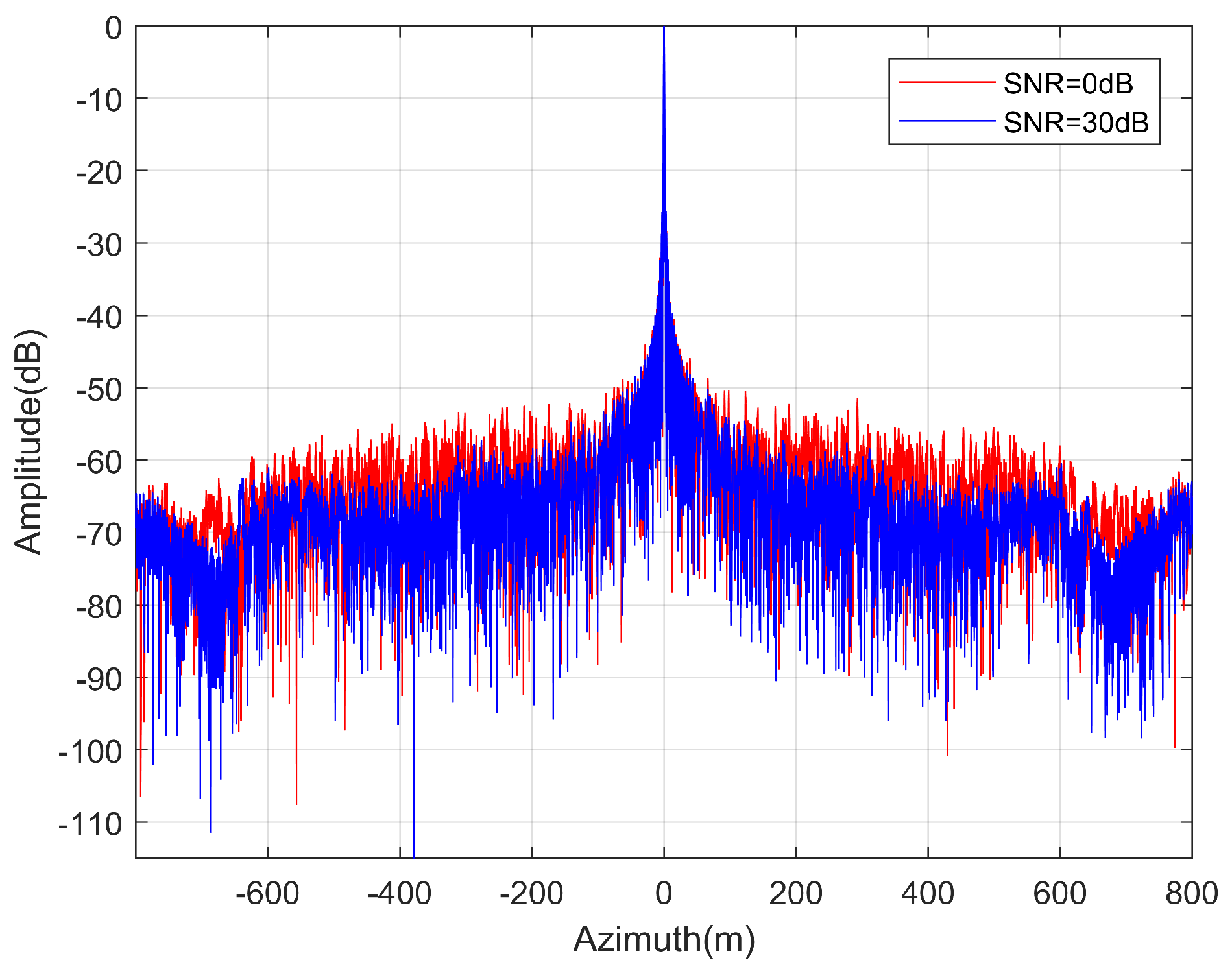
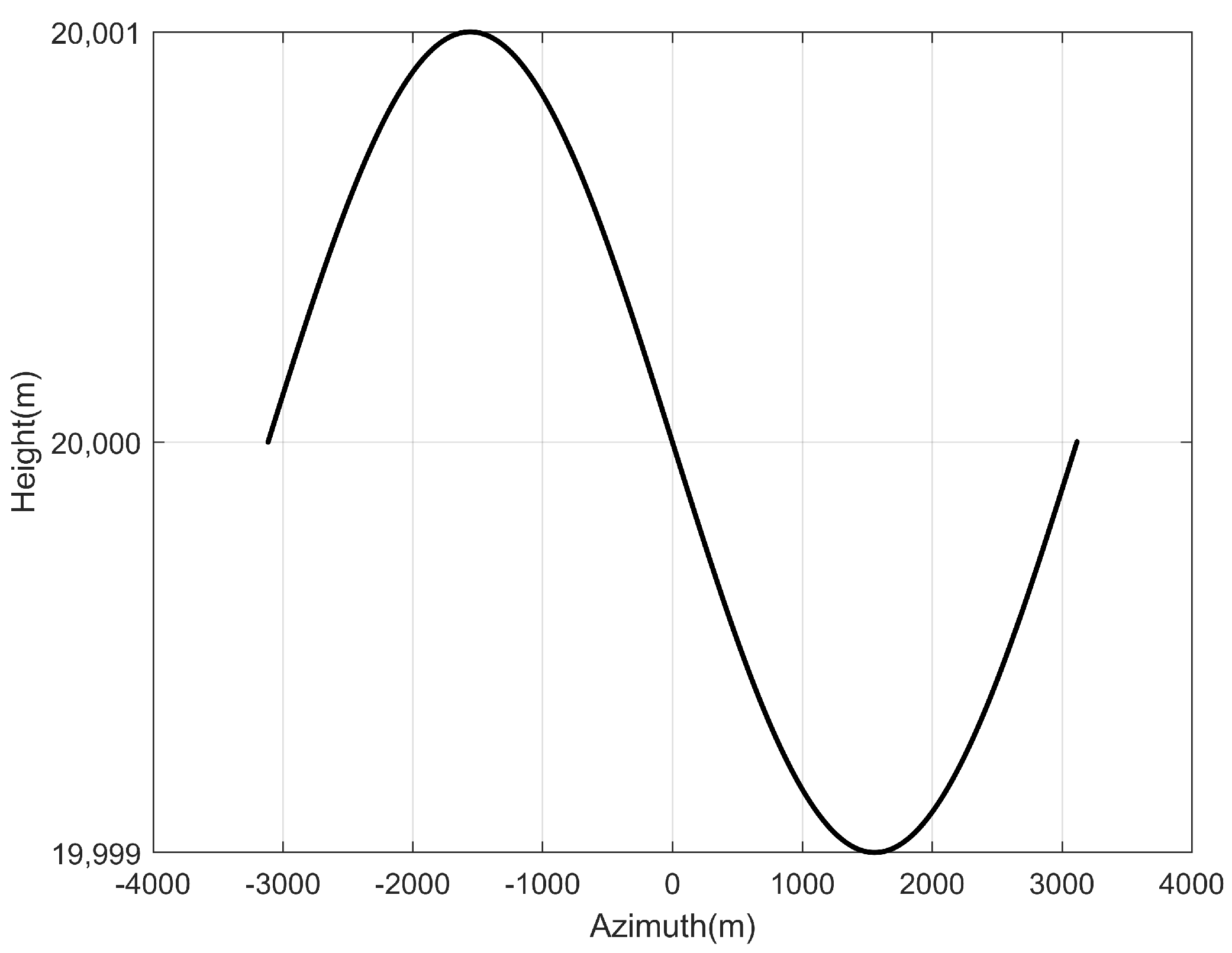
The proposed algorithm has two additional advantages. As the proposed method is to reconstruct in the image domain and perform minimum entropy estimation utilizing sub-images, the proposed method performs well when the SNR of the raw data is low. Moreover, the proposed method can perform the curved trajectory HRWS SAR reconstruction. It is because the motion error of the platform is compensated in the sub-images imaging by using the back-projection algorithm.
The rest of this paper is organized as follows. In
Section 2, the signal model and non-uniformly sampled signal reconstruction theory is introduced. In
Section 3, the proposed adaptive unambiguous reconstruction method is described in detail. In
Section 4, the experimental results of simulated multichannel data and equivalent multichannel data generated from single-channel SAR verify the effectiveness of the proposed method. In
Section 5, some discussion is given. Finally,
Section 6 provides some conclusions.
2. Signal Model
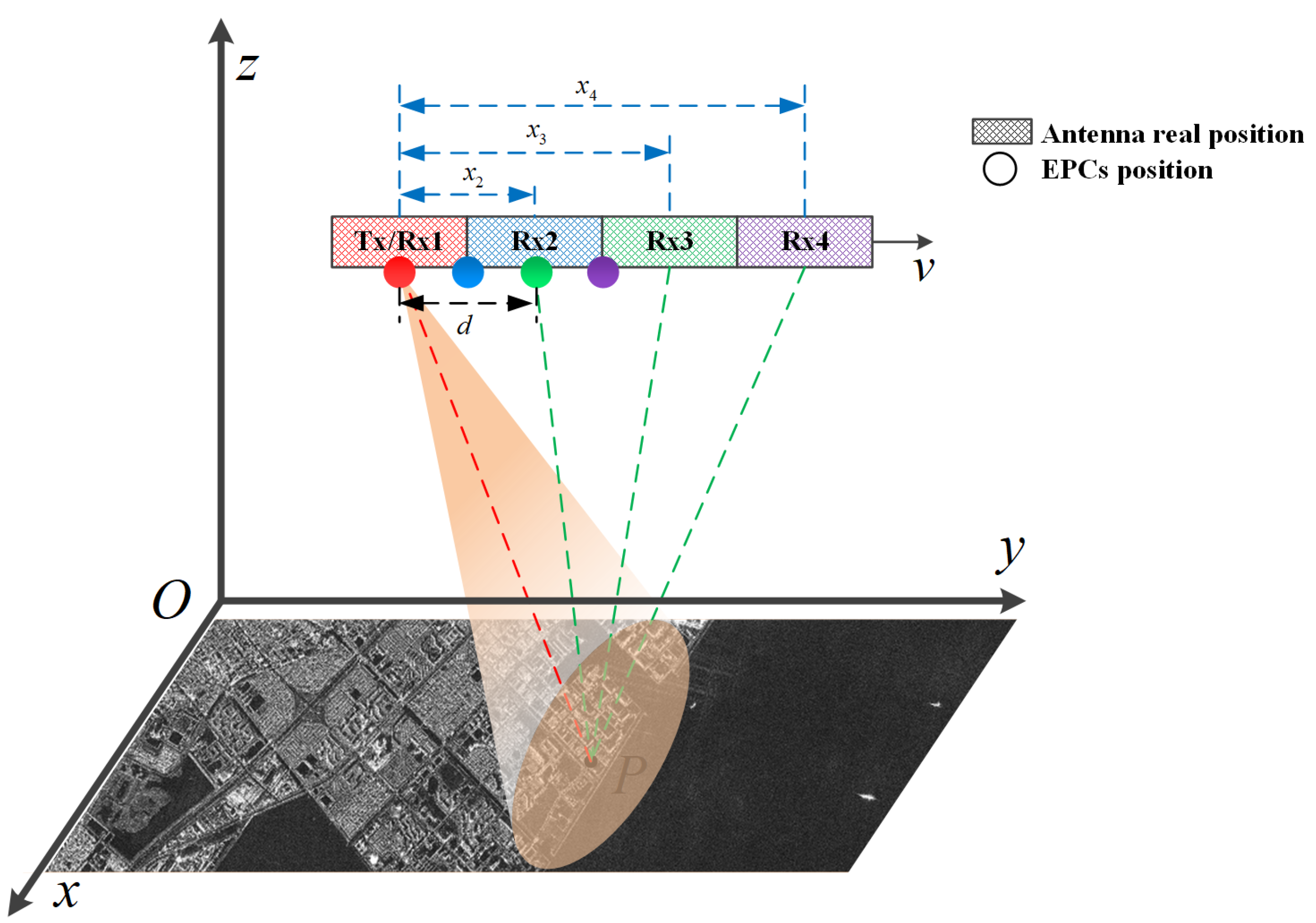
The observation geometry of the multichannel SAR system is depicted in
Figure 1.
y-axis denotes the platform movement direction and its velocity is
v.
P is a target in the observation scene. The system has four receivers, of which the receiver
is also a transmitter
as a reference channel. Assuming
d is the channel spacing, the baseline length between the
nth channel and the reference channel is
, where
. It has been proved that the multichannel SAR system can be regarded as a SAR that transmits and receives signals at the effective phase centers (EPCs) that are located in the middle of the transmitter and receivers [
9]. The spacing between the adjacent EPCs is
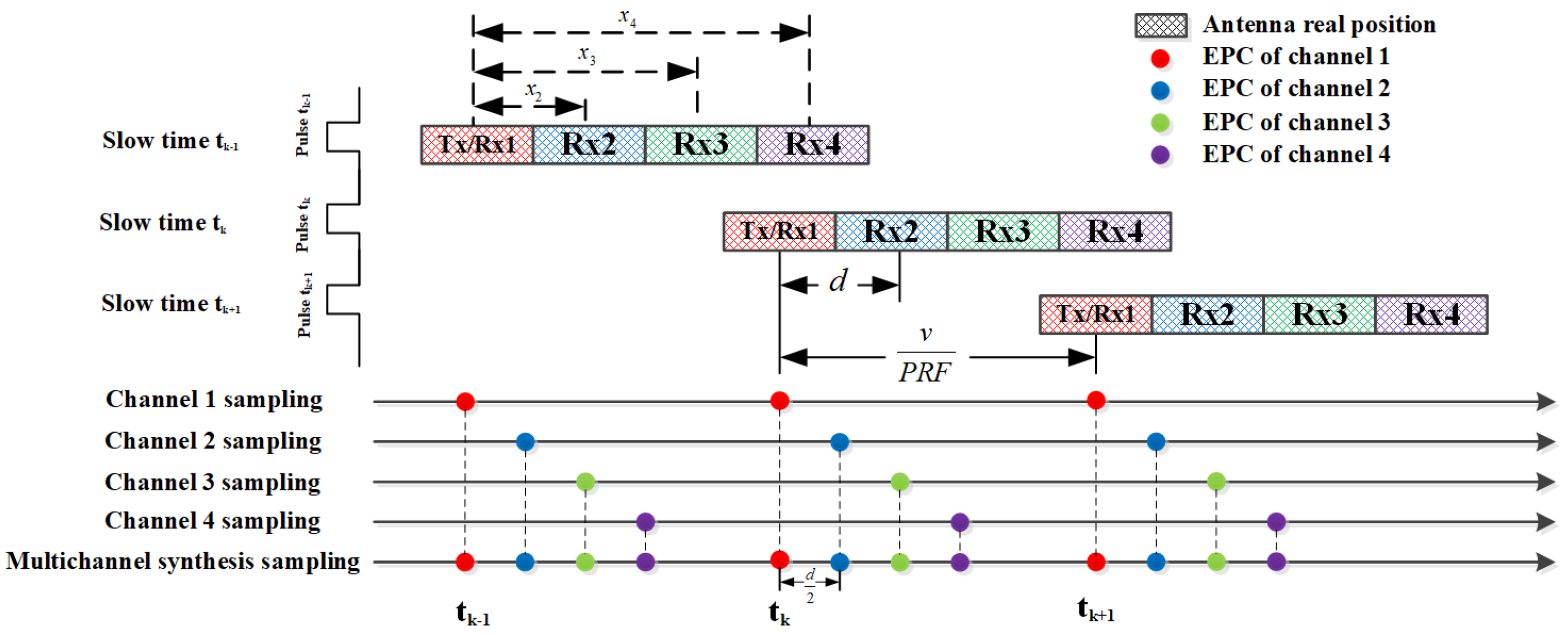
. The subsequent research in this paper is based on the effective phase centers model, and the azimuth sampling pattern for the four-channel SAR system is shown in
Figure 2.
Thus, the instantaneous slant range from the EPC to the scatter
P can be expressed as
where
t denotes the slow time of the corresponding EPC, and
is the nearest distance from the target
P to the line trajectory of the platform. Generally, assuming that the SAR system transmits a chirp signal, after pulse compression, the echo received by the EPC corresponding to the slow time
t can be expressed as
where
is the dual echo delay from the EPCs to the
mth pixel at slow time
t,
is the complex-valued reflectivity of the scatterer,
is the antenna pattern function,
B is the bandwidth,
c is the speed of light, and
is the wavelength of the transmitted signal.
According to the geometric relationship of the multichannel effective phase centers shown in
Figure 2, the EPCs are uniformly distributed in the azimuth only when the parameters PRF,
v, and
d satisfy
where PRF is the pulse repetition frequency,
N is the number of channels, and
in
Figure 1. The HRWS imaging can be performed by rearranging the echoes corresponding to the uniformly distributed EPCs, where the bandwidth of the multi-channel system can be expanded to
. However, due to the limited choice of PRF, the change of the platform speed, it is difficult to strictly satisfy Equation (
3). The EPCs are non-uniformly distributed after rearranging. The azimuth sampling time of the EPC corresponding to
nth channel in the
kth pulse repetition period can be given by
where
is the pulse repetition time,
K is the number of azimuth sampling periods of the echo.
is the
nth channel sampling time bias which can be written as
where
is the time of the equivalent sampling interval of two adjacent channels.
N denotes the number of channels.
Combining Equations (
2) and (
4), the non-uniformly sampled echo in the azimuth can be expressed as
. Using this echo for imaging will cause image azimuth ambiguity. Thus, the uniformly sampled echo needs to be recovered. The uniform sampling time
of channel
in the
th pulse repetition period can be expressed as
where
denotes the pulse repetition period,
denotes the channel. Combining Equations (
2) and (
6), the uniformly sampled echo can be expressed as
, and it can be reconstructed by using the non-uniformly sampled signals [
19], which are expressed as
where
is the interpolation period, and
is the reconstruction coefficient, which can be expressed as
Generally, according to the BP algorithm [
35], the BP component of the
mth pixel of the imaging scene using the uniform sampling echo can be expressed as
where
is the center angular frequency of the transmitted signal. Finally,
are accumulated to obtain the final multichannel unambiguous reconstruction result, which is shown as
3. Sub-Image Local Area Minimum Entropy Reconstruction Method
Due to the change of channel characteristics affected by some environmental factors and the hardware differences of each channel, there are unavoidable channel mismatches among channels. Thus, the multichannel SAR system usually suffers from channel amplitude error and channel phase error, which significantly degrades the performance of the reconstruction methods. In addition, due to the low manufacturing accuracy of the antenna, its position deviates from the nominal one, resulting in baseline error. For this reason, the accurate reconstruction coefficient will not be obtained, leading to the wrong reconstruction. Therefore, baseline error is also a non-negligible factor that causes image azimuth ambiguity.
In this paper, we propose a novel sub-image local area minimum entropy reconstruction method (SILAMER). It can adaptively estimate the reconstruction coefficient and compensation phase through iteration, and simultaneously solve the problems of amplitude error, phase error, and baseline error in this process. SILAMER mainly consists of three steps: (1) According to the idea of image domain reconstruction, the sub-images are generated by using a back-projection method; (2) An estimation algorithm based on sub-image local area minimum entropy is proposed to obtain the optimal reconstruction coefficient and the compensation phase; (3) The sub-images are weighted by the optimal estimated reconstruction coefficient and calibrated by the compensation phase to obtain the unambiguous reconstruction image.
3.1. Sub-Images Generation and Reconstruction with Errors
According to the idea of image domain reconstruction [
19], the sub-images need to be generated for reconstruction. To compensate platform motion error and to facilitate sub-image weighting in subsequent steps, the back-projection imaging algorithm is used to obtain sub-images. When the sub-images are correctly weighted by the reconstruction coefficient, an unambiguous image can be obtained. More importantly, the sub-images can be used to estimate the reconstruction coefficient and the compensation phase in the subsequent steps.
Substituting Equation (
7) into Equation (
9) and according to the characteristics of the reconstruction coefficient, the image of channel
can be written as
where
,
can be transformed into an
dimensional vector
that does not depend on
[
19].
are the sub-images for channel
, which can be weighted and summed by the reconstruction coefficient
to obtain the reconstructed result of each channel
.
According to Equations (
10) and (
11), the final reconstructed image can be represented as
where
represents all sub-images.
The amplitude imbalance of the channel is manifested as the inconsistent gain coefficient of the channel. Let
denote the amplitude error of the
nth channel, that is, the amplitude gain coefficient. Let
denote the phase error of the
nth channel. Considering the amplitude error and the phase error, the reconstructed image can be expressed as
In addition, when there is a baseline error, the time bias
in Equation (
4) will change. This will affect the reconstruction coefficient
, resulting in an ambiguous image. Assume that the estimated reconstruction coefficient without baseline error is
. Let
and
denote the estimations of the
and
, respectively. Thus, the unambiguous reconstruction image is expressed as
where
. It indicates that the estimated value of the amplitude error can be combined with the reconstruction coefficient. Thus, the new reconstruction coefficient
can correct amplitude error and baseline error.
In order to facilitate the derivation of the formula, the sub-images combining the amplitude and phase error can be expressed as a one-dimensional vector . If let substitute , , where and is the number of sub-images. Correspondingly, the estimated reconstruction coefficient is re-expressed as a one-dimensional vector . If let substitute , , where J is the length of the reconstructed coefficient. The estimated phase vector can be expressed as .
The unambiguous reconstruction image can be rewritten as
3.2. Reconstruction Coefficient and Compensation Phase Estimation
In this subsection, we present an estimation algorithm based on sub-image minimum entropy. It can obtain the optimal reconstruction coefficient and the compensation phase to solve the problems of amplitude error, baseline error, and phase error simultaneously. If it uses the whole scene of the sub-image as the input, it suffers from a heavy computational burden. To improve the estimation efficiency, we use a local area of each sub-image as the input of the estimation algorithm.
As amplitude error, phase error, and baseline error result in azimuth ambiguity of the reconstructed image degrading the image quality, we design an estimation model based on optimal image quality criteria to estimate the reconstruction coefficient and the compensation phase to obtain an unambiguous image. Based on the fact when the SAR image quality is better, the image entropy value is smaller [
36], image entropy is chosen as the evaluation criteria of image quality. The entropy of an image can be expressed as
where
is the modulus of a complex number.
is the
mth pixel’s image value based on the estimated reconstruction coefficient and compensation phase.
When the estimated reconstruction coefficient and compensation phase are more accurate, the image entropy is smaller. The optimization model based on minimum entropy criteria can be expressed as follows
Hence, the optimal reconstruction coefficient and compensation phase should satisfy the following equation.
To solve nonlinear equations, the partial derivative of entropy function
with respect to
is first derived as
where
Since
thus,
The partial derivative of entropy function
with respect to
is derived as
where
Thus, the gradient vectors can be expressed as
In order to solve Equations (
21) and (
22), there are several iterative estimation methods used to obtain the approximate solution, such as the steepest descent method, the Newton iteration method, and the conjugate gradient method. Considering the computation burden and the quality of the reconstruction image, the conjugate gradient method [
37] is utilized in this paper. Combined with the conjugate gradient method, the algorithm steps for solving Equations (
21) and (
22) are outlined as Algorithm 1.
| Algorithm 1. Reconstruction Coefficient and Compensation Phase Estimation |
| Inputs: reconstruction sub-images , iterative number N |
| Outputs: reconstruction coefficient , compensation phase |
| Initialize: , , |
| whiledo |
| Step 1: use Armijo line search method to calculate step size by solving the |
| following formula |
| |
| Step 2: update the reconstruction coefficient and the compensation phase |
| |
| Step 3: update search direction |
| |
| where |
| |
| end while |
| return |
In the following, the computation complexity of the proposed method is analyzed. Assume that
is the number of the azimuth-direction samples of one channel, and the pixels of the imaging scene are
. Each sub-image is obtained by performing a BP imaging, which uses the echo data of one channel. According to the characteristics of the BP algorithm, it can be known that the calculation amount of the BP algorithm is mainly in the back-projection part and the time complexity of the algorithm is
[
19]. Let
denote the total amount of calculation of one of the sub-images. Thus, the amount of calculation to generate
sub-images is
. The sub-images are weighted to get the final reconstruction result, and its calculation amount is
complex multiplication and
complex addition. The proposed reconstruction algorithm uses the conjugate gradient method to calculate the reconstruction coefficient and the compensation phase, as shown in Algorithm 1. Step 1 of Algorithm 1 uses the Armijio Line Search algorithm to search for the best step size through iteration, which needs to calculate the entropy of the reconstruction result several times. In step 3 of Algorithm 1, the gradient of the image entropy function is calculated, which also includes calculating the entropy value of the reconstruction result. Due to the large imaging scene, calculating the entropy value of the reconstruction result is the main factor affecting the calculation amount of the conjugate gradient algorithm. We mainly consider the amount of image entropy calculation in the conjugate gradient algorithm. Usually, in one iteration of the conjugate gradient algorithm, it is necessary to calculate the entropy value of the reconstruction result several times, and after several iterations, the optimal reconstruction coefficient and compensation phase can be estimated. Assuming that one iteration needs to calculate the entropy function
times on average, and iterate
times to obtain the optimal solution. Then the amount of calculation is
complex multiplication and
complex addition.
As we have seen, if the whole scene of the sub-image is used as the input of the estimation, the estimation algorithm suffers from a heavy computational burden. As the multichannel reconstruction with errors only causes the image azimuth ambiguity and does not affect the imaging performance in range, the effect on the reconstructed image ambiguity caused by errors at different distances can be considered to be consistent. The Local area of the imaging result, which includes part of the distance and the entire azimuth, can be used to indicate the imaging quality of the entire image. The selection of this local area needs to satisfy the condition that the imaging target and the ambituity of the target are in this area. For HRWS SAR image, an area including randomly several range bins and the entire azimuth bins can usually meet this condition.
Let the reconstruction image and sub-image be represented in two-dimensional forms, which are
and
. The whole scene contains
rows in range and
columns in azimuth and has
pixels. Let
denote the
th row to the
th row of the reconstruction image, where
. Let
denote the
th row to the
th row of the sub-image. The local area reconstruction image can be expressed as
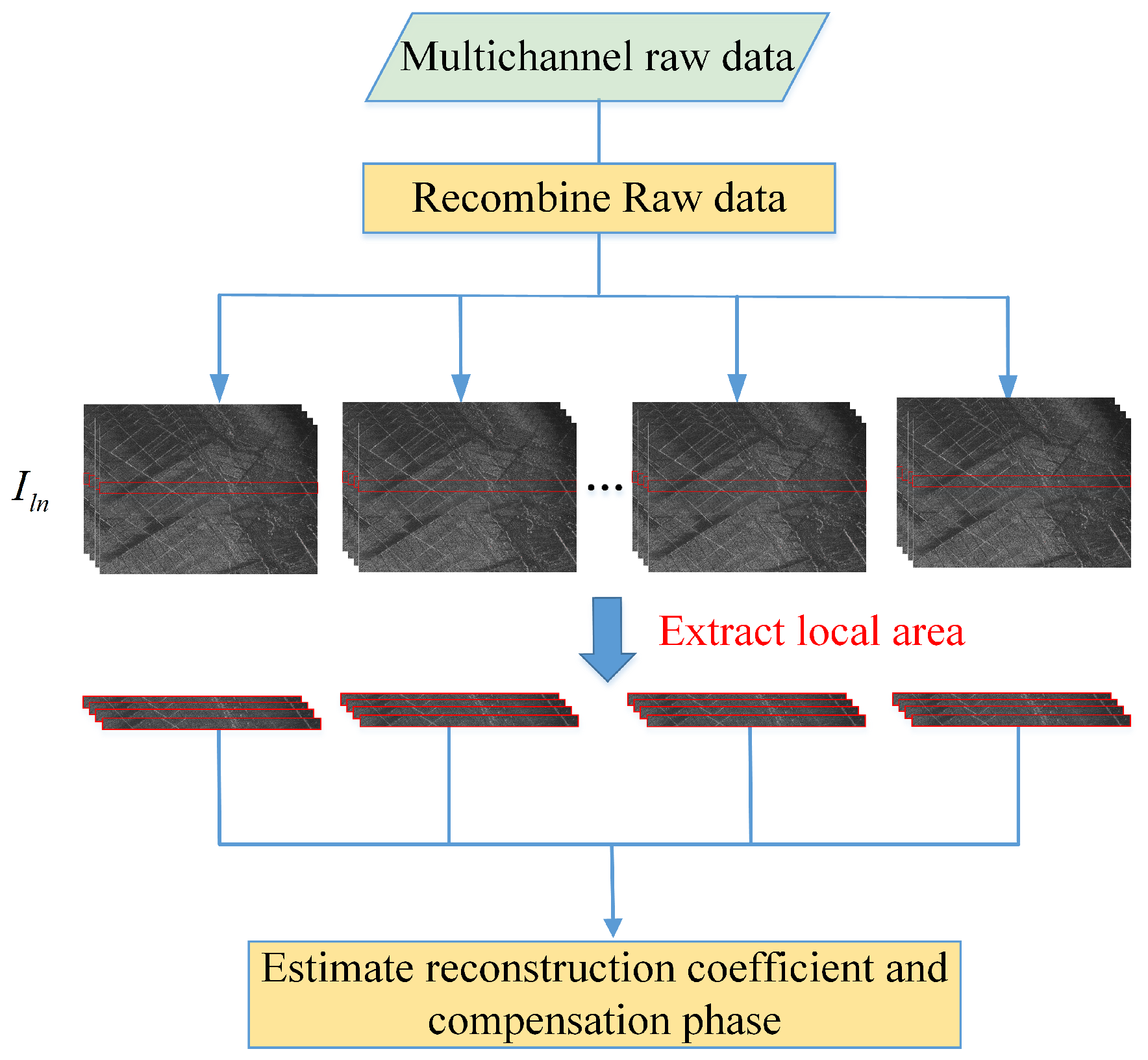
Local area reconstruction image is obtained by using local area sub-image . Thus, to improve the efficiency of the estimation algorithm, we can select this local area sub-image as the input of the estimation algorithm and performs estimation operations. We randomly select several range bins from to and all azimuth bins from 1 to .
Figure 3 shows the local scene estimation method. Generally, the imaging scene of multi-channel SAR is extremely wide, so the proposed algorithm using the local area for estimation will greatly improve the estimation efficiency.
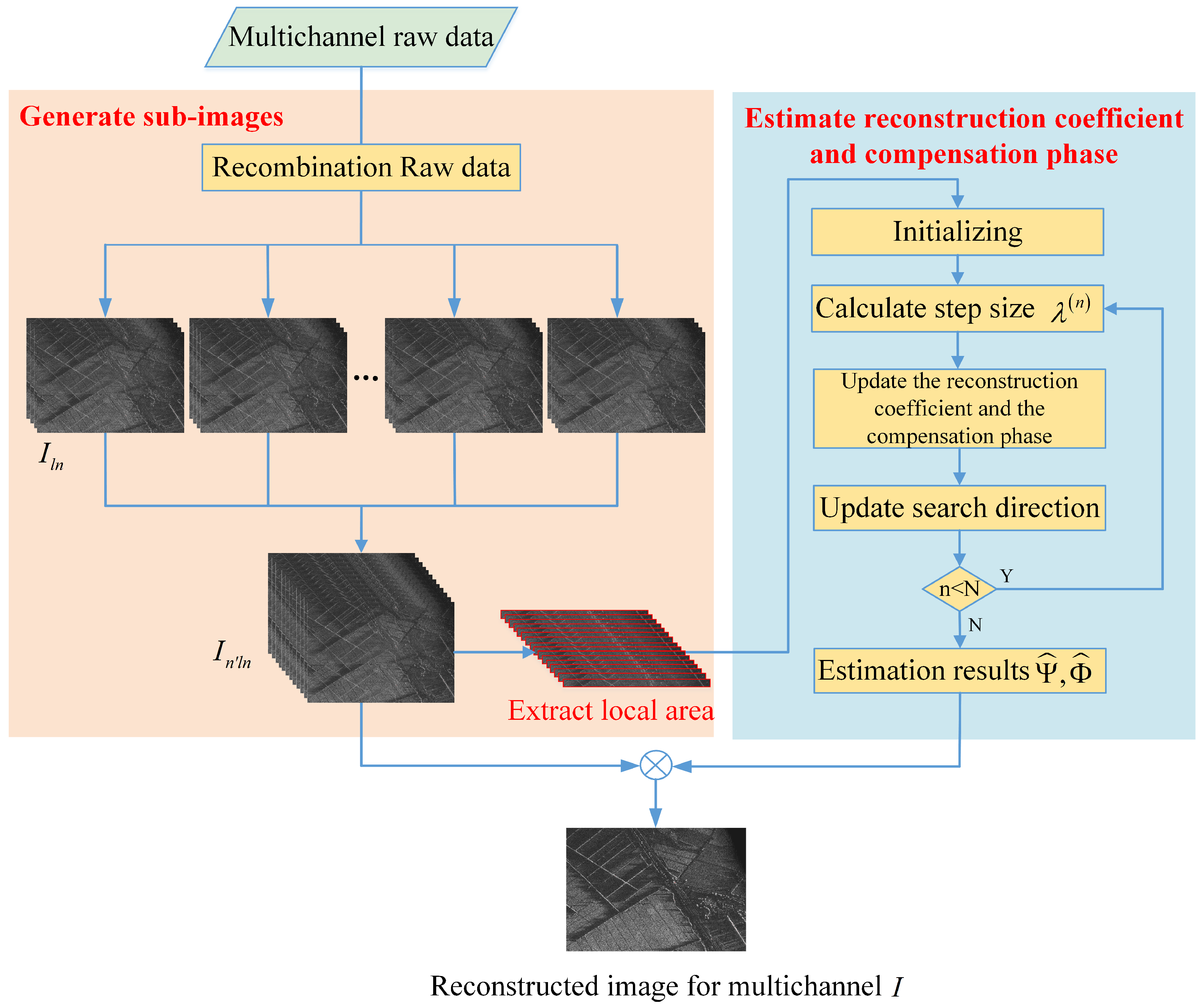
3.3. Unambiguous Reconstruction
Finally, when the optimal reconstruction coefficient estimation
and compensation phase
are obtained, the sub-images are weighted by the reconstruction coefficient and calibrated by the compensation phase to obtain the unambiguous reconstruction image by Equation (
16). The flow of SILAMER is depicted in
Figure 4.
6. Conclusions
In this paper, a novel sub-image local area minimum entropy reconstruction method is proposed for the multichannel HRWS SAR systems with amplitude, phase, and baseline errors. For the proposed method, we first generate the sub-images by utilizing the back-projection algorithm. Then, we proposed an estimation algorithm to obtain the optimal reconstruction coefficient and the compensation phase. It is worth noting that if the estimation algorithm uses the whole scene of the sub-image as the input, it suffers from a heavy computational burden. It greatly improves the estimation efficiency by using a local area of the sub-image as the input of the estimation. Finally, the sub-images are weighted by the estimated reconstruction coefficient and corrected by the compensation phase to obtain the unambiguous reconstructed image.
The proposed method can simultaneously correct amplitude error, baseline error, and phase error by using the estimated reconstruction coefficient and the compensation phase. Moreover, since the proposed method performs the reconstruction based on sub-image local area minimum entropy, it has the favorable adaptability to the multichannel SAR system with various errors. In addition, there are two other advantages of the proposed method. One of the advantages is that the proposed method can perform well under the condition of low SNR, because it is to reconstruct in the image domain and performs minimum entropy estimation utilizing sub-images. The other is that the proposed method can perform the curved trajectory HRWS SAR reconstruction. This is because the motion error of the platform is compensated in the sub-images imaging by using the back-projection algorithm. The simulation results and the equivalent multichannel SAR data processing generated from an airplane SAR system verify the effectiveness of the proposed method.
In addition, there is still some work to be done in the future, such as studying the highly squinted HRWS SAR reconstruction and considering the challenge of reconstruction for more complex maneuvering trajectories SAR.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}