
Measurement of Forest Inventory Parameters with Apple iPad Pro and Integrated LiDAR Technology



Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area and Sample Plots
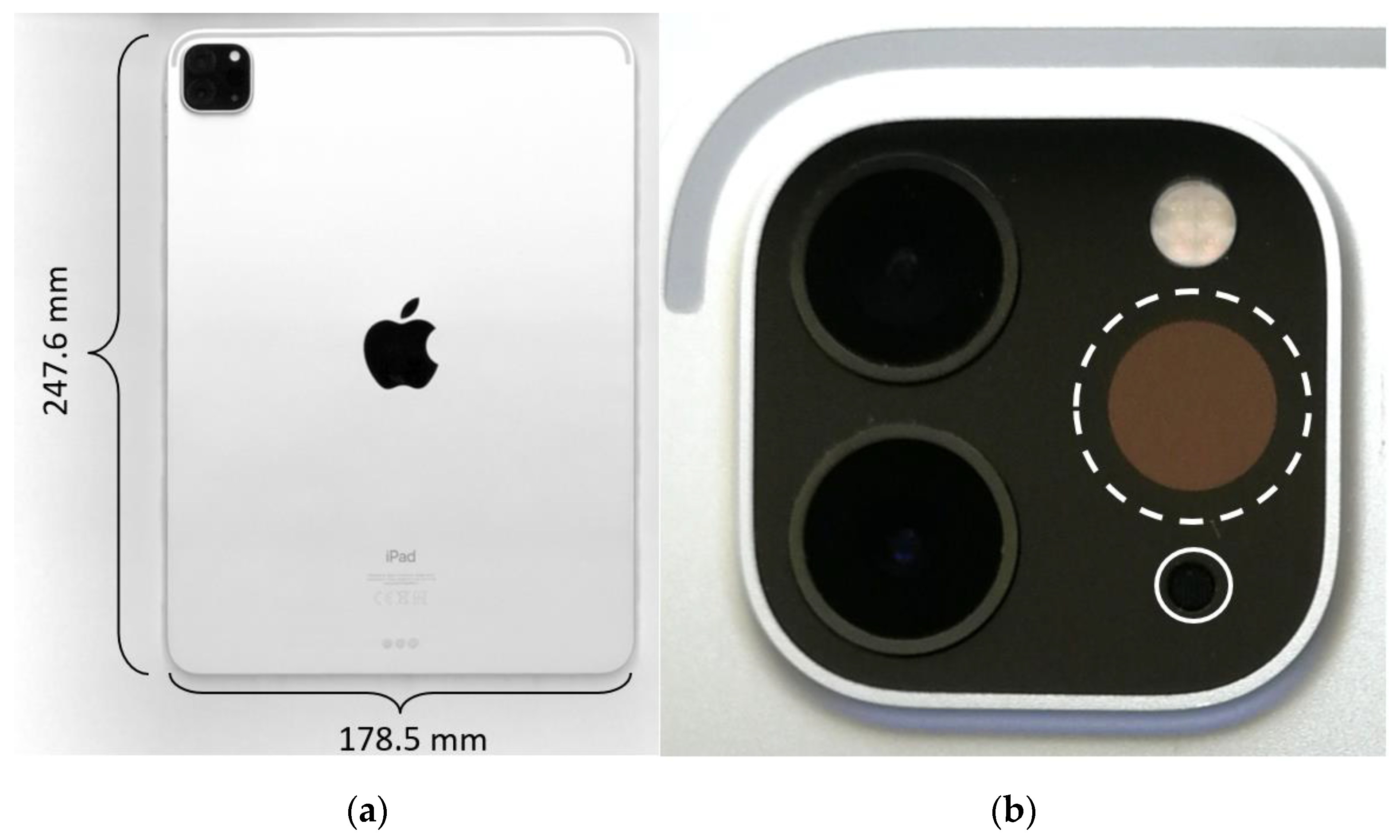
2.2. Instrumentation
- (i)
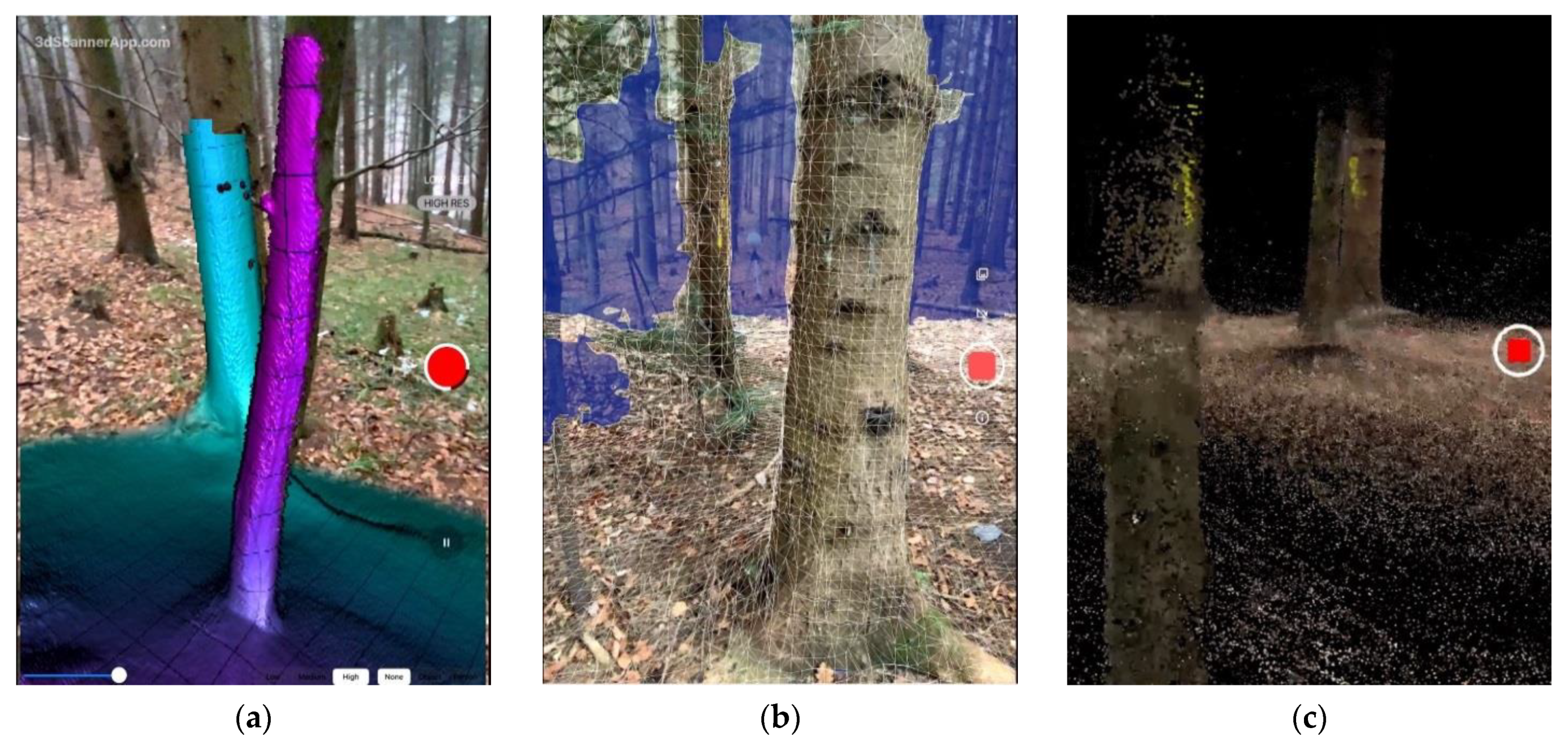
- 3D Scanner App 1.8.1 [75] (Laan Labs, New York, NY, USA) was used in High Res mode, with the following settings: max depth = 5 m; resolution = 10 mm; confidence = high; masking = off. The scans were colorless, and no postprocessing was required.
- (ii)
- Polycam 1.2.7 [76] (Polycam Inc., San Francisco, CA, USA) did not offer any setting options for the scan and was thus used in standard mode. Postprocessing of the scans was necessary and performed within the app, using the standard quality setting. As raw scan data were saved, postprocessing could be conducted any time after the completion of the scans.
- (iii)
- SiteScape 1.0.2 [77] (SiteScape Inc., New York, NY, USA) was used with the following settings: scan mode = max area; point density = low; point size = low. The scan was automatically post-processed in the app directly after scanning.
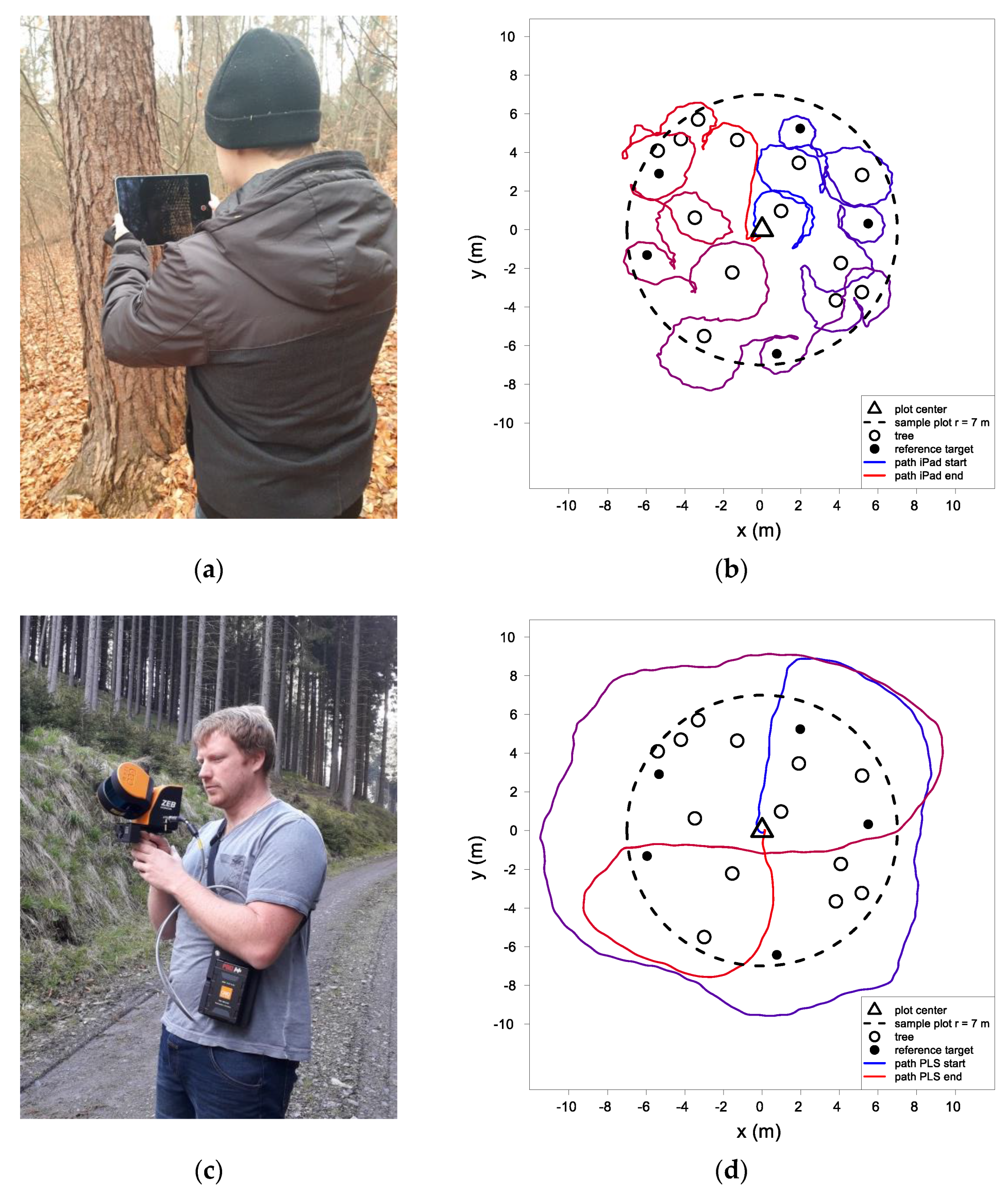
2.3. Data Collection
2.4. Point Cloud Processing, Clustering, Detection of Tree Positions, and dbh Measurement
2.5. Evaluation of Point Cloud Quality and Diameter Fitting on Cylindrical Reference Objects
2.6. Reference Data
2.7. Accuracy of Tree Detection, dbh Measurement, and DTM
3. Results
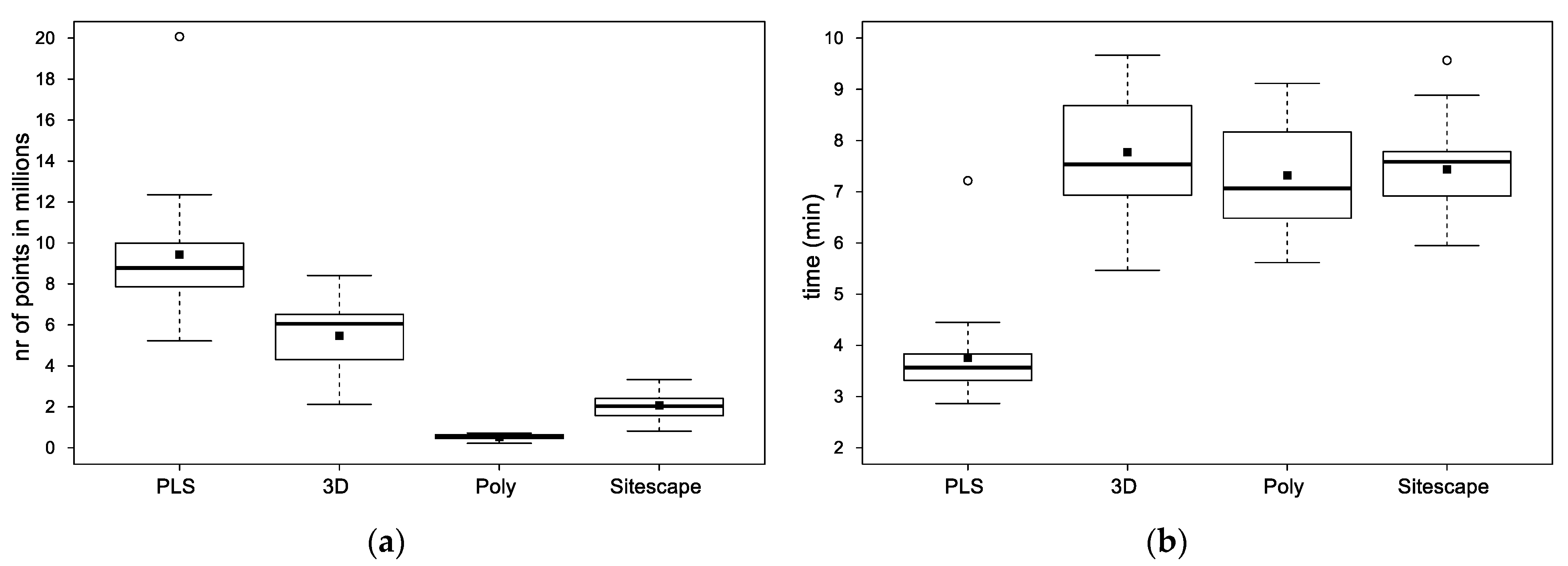
3.1. Acquisition Time and Number of Points
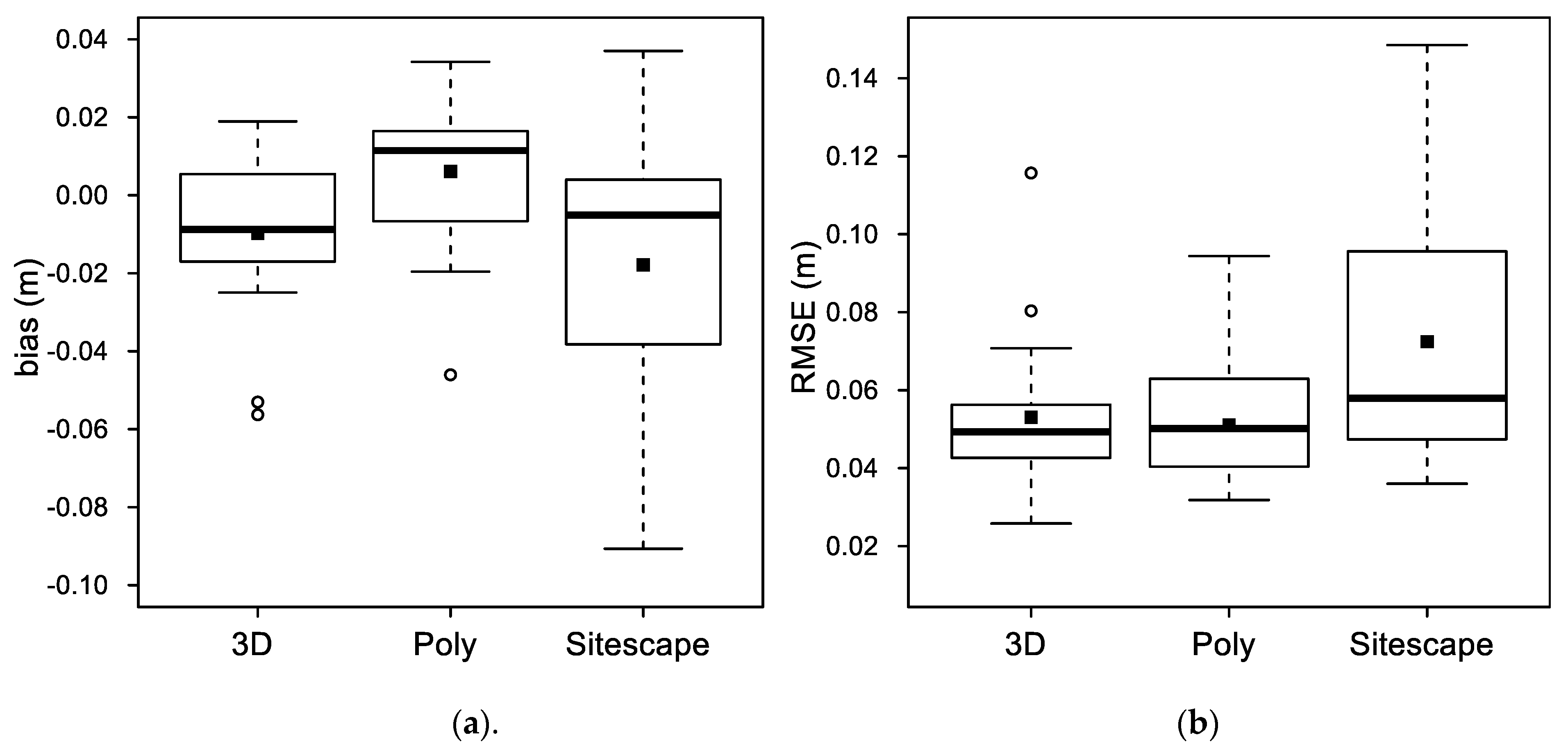
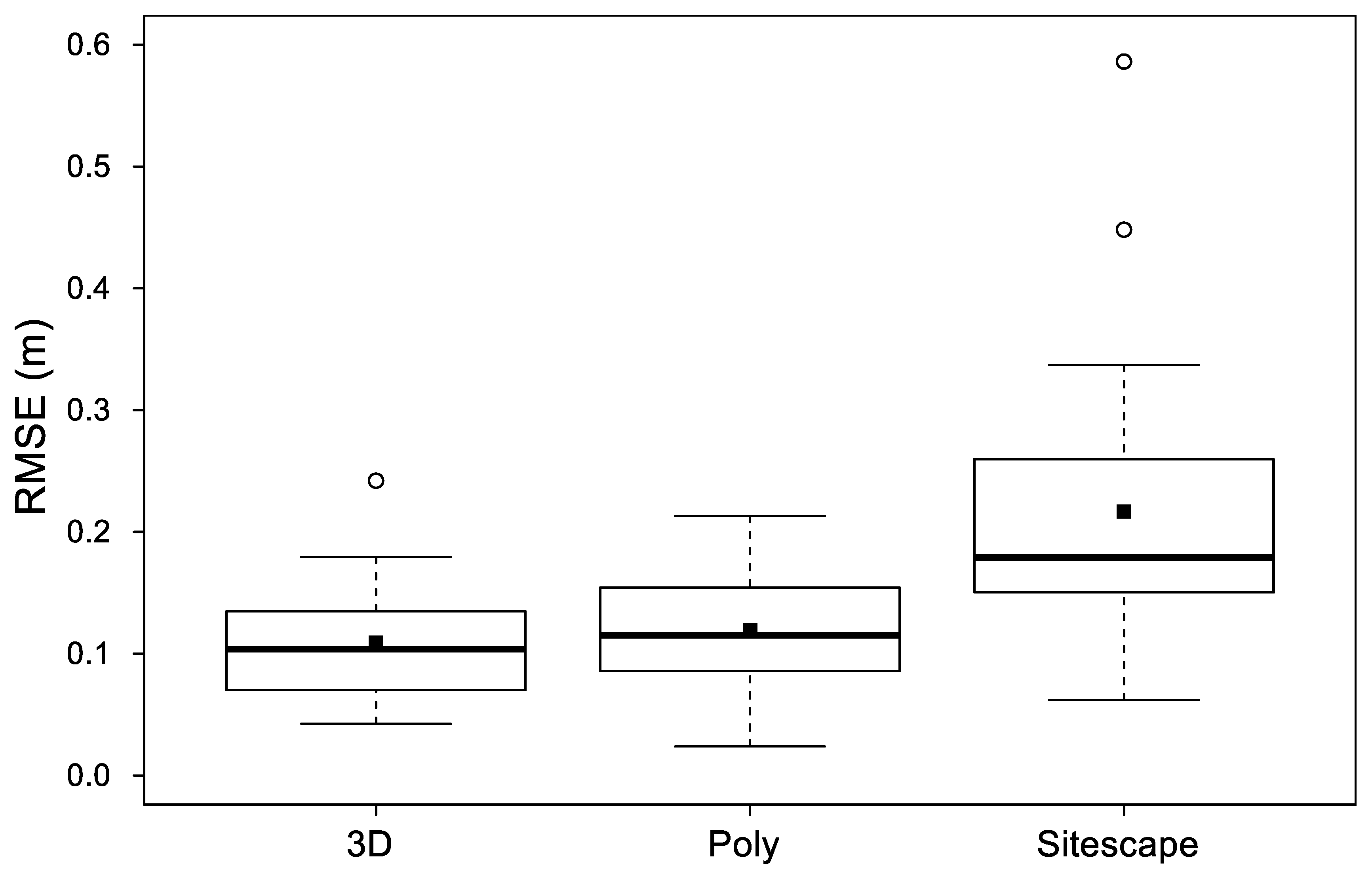
3.2. Digital Terrain Model (DTM)
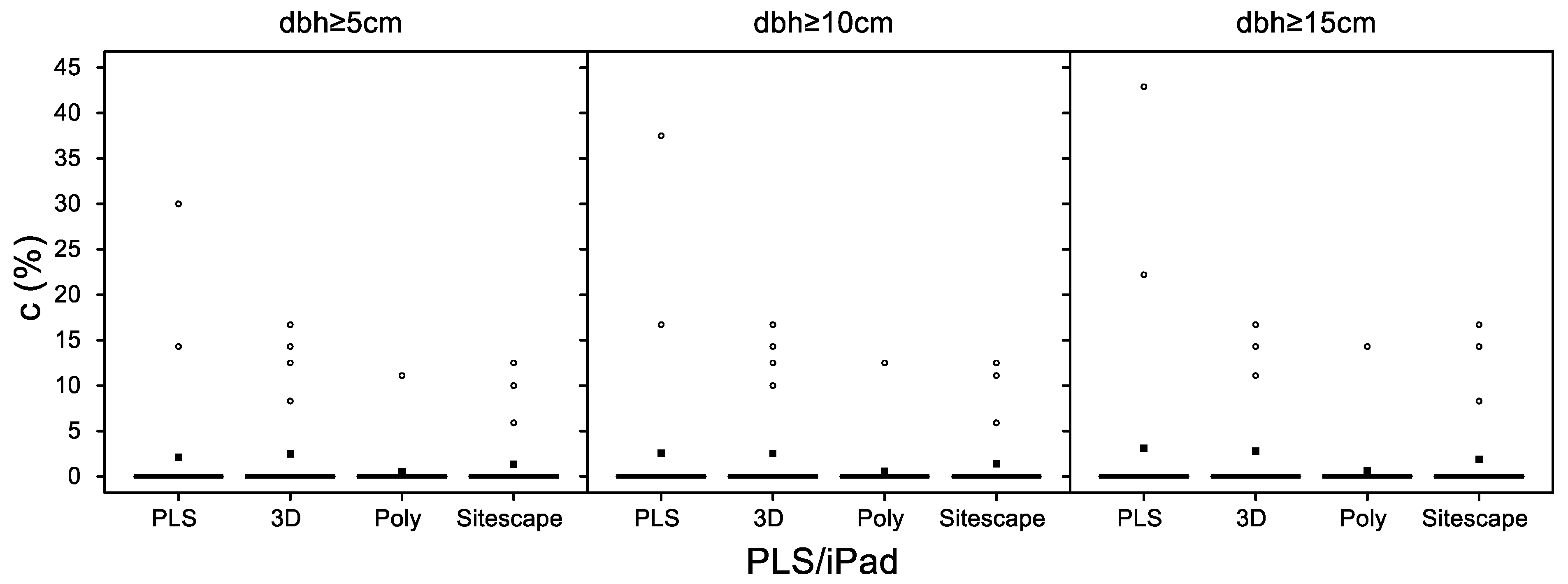
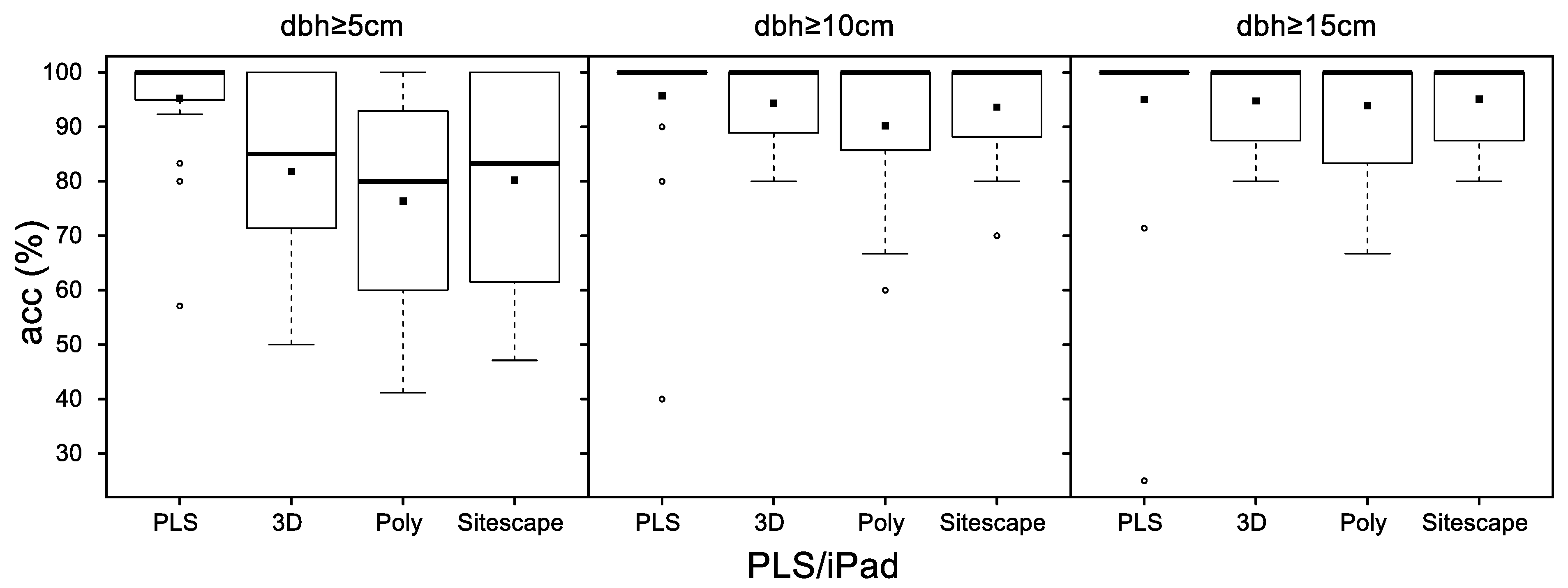
3.3. Detection of Tree Positions
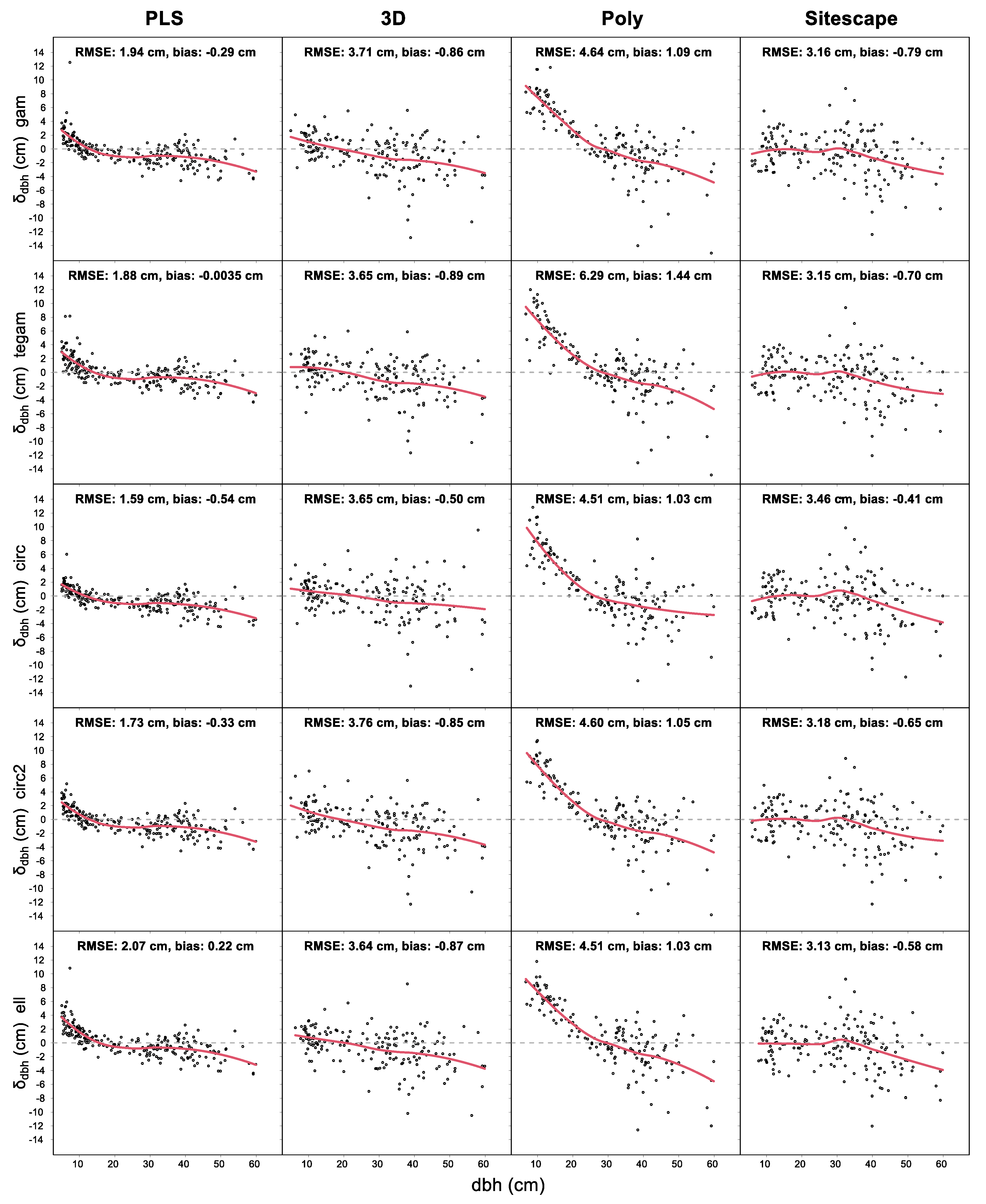
3.4. Estimation of dbh
3.5. Tree Location
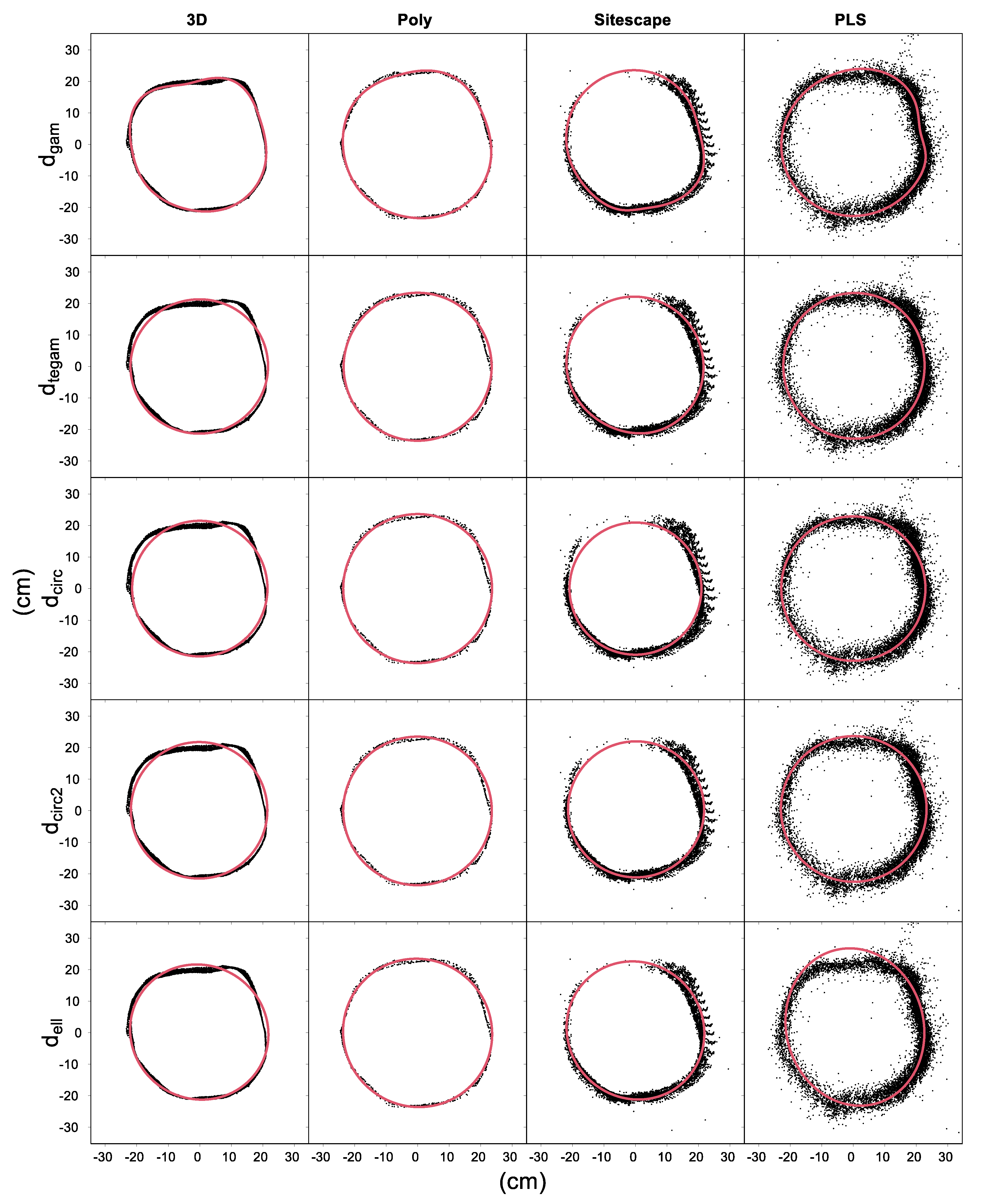
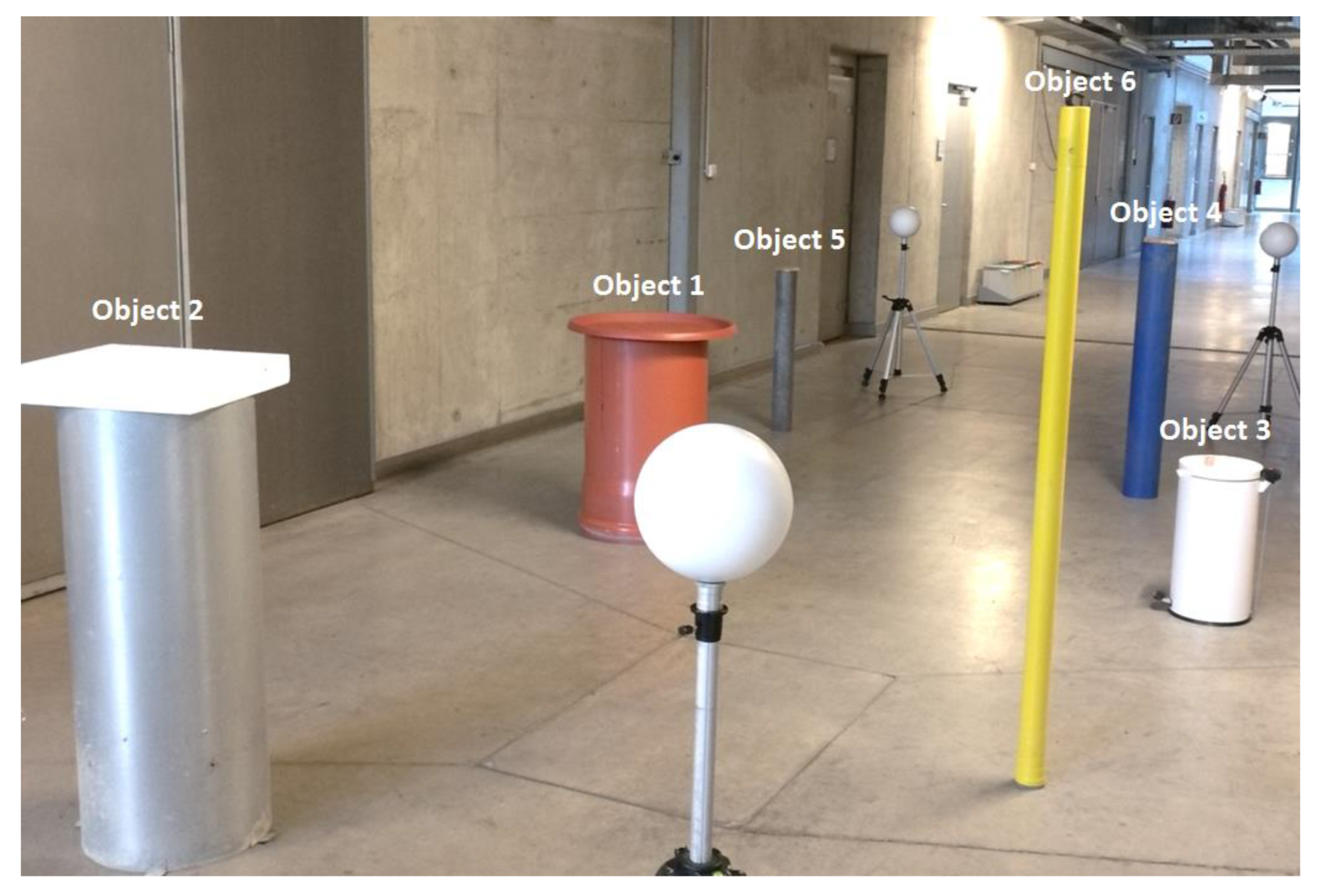
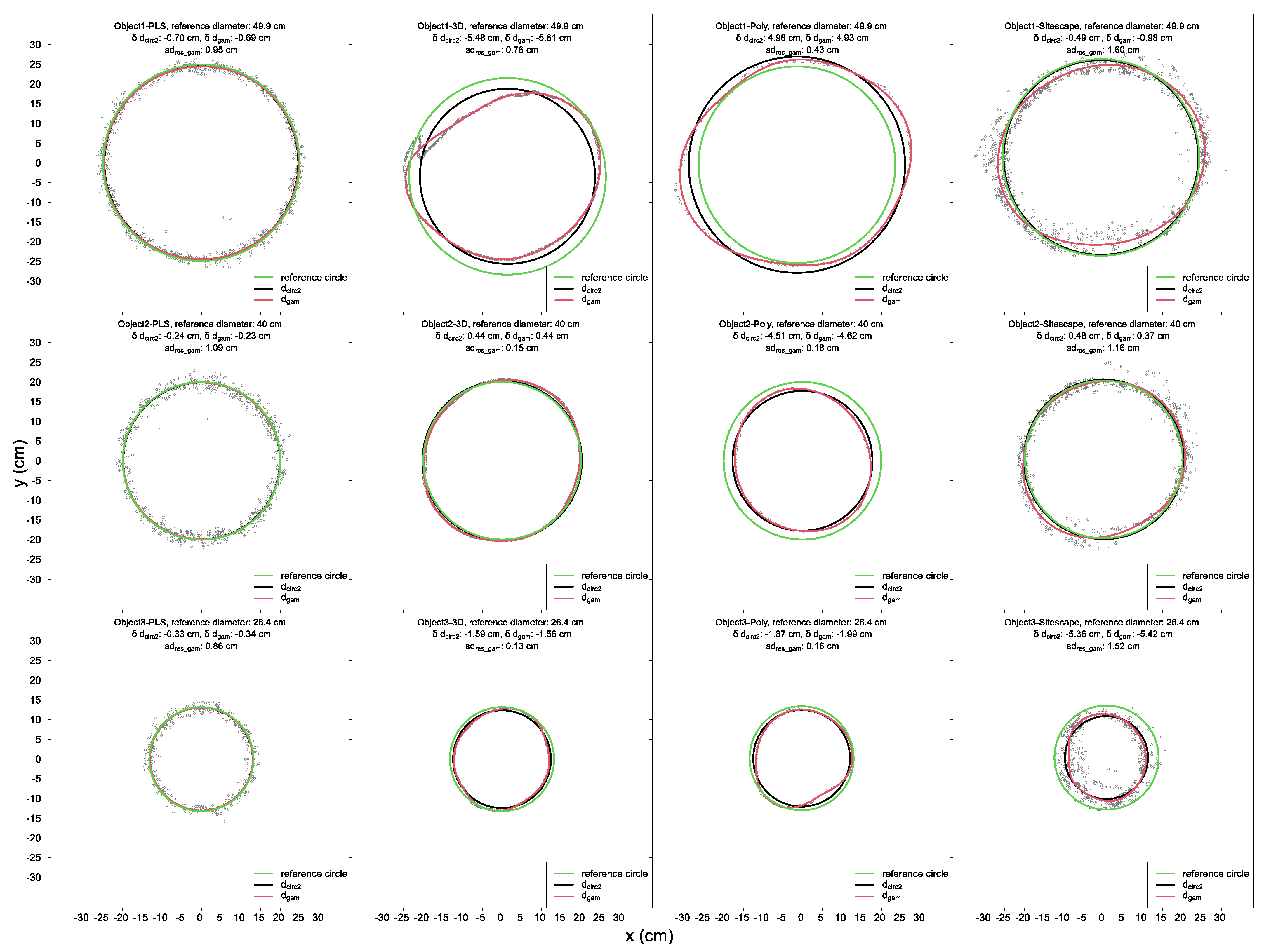
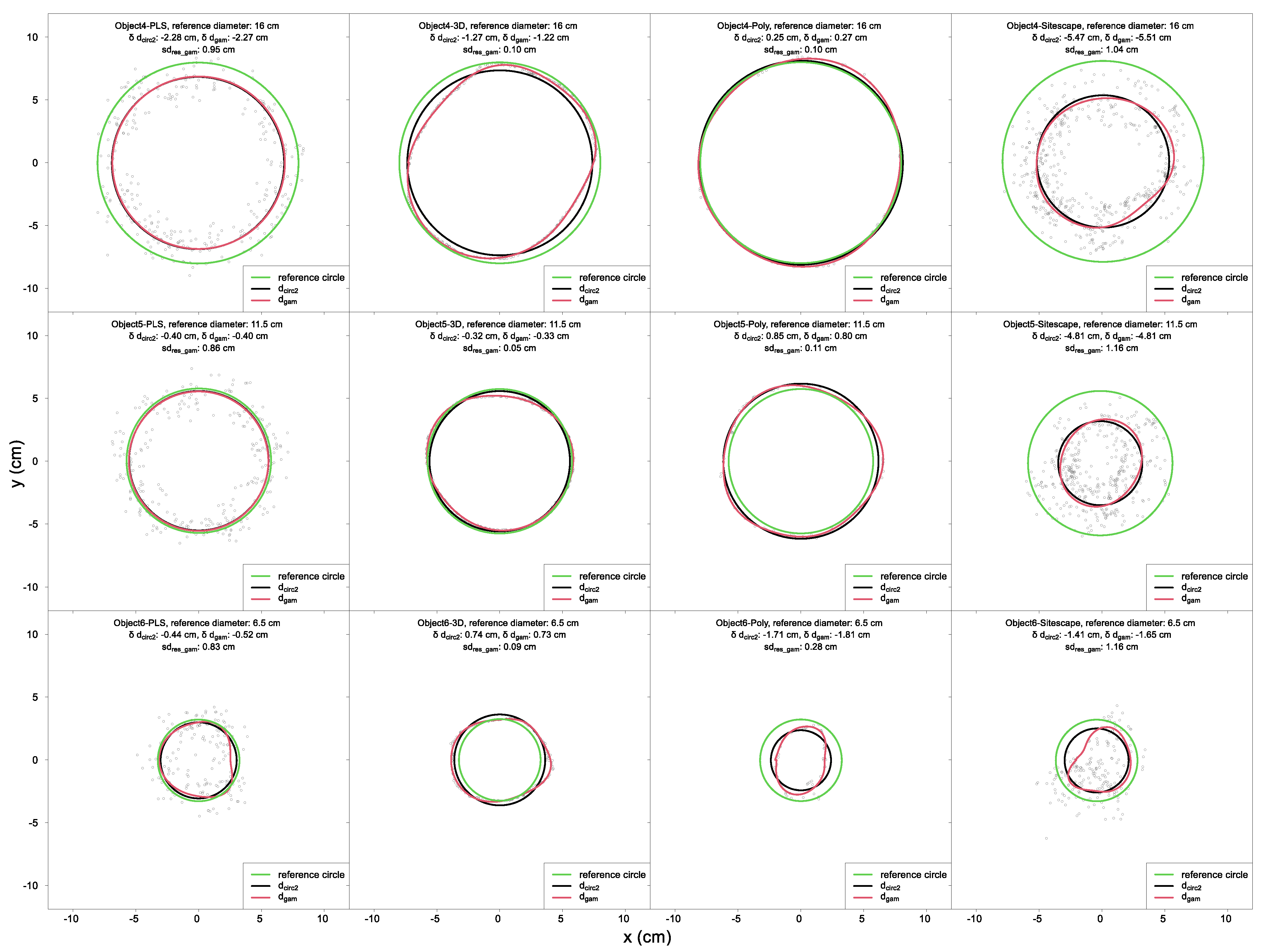
3.6. Cylindrical Reference Objects under In Vitro Conditions
4. Discussion
4.1. DTM Modelling, Stem Detection and DBH Estimation
4.2. Point Cloud Quality and Field Experience
4.3. Comparison with Other Studies
4.4. Outlook into the Future
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot | Stand Class | Regeneration | dbh Range (cm) | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 1 | 27.4 | 4 | 96 | 0 | 0 | 0 | 24.4 | 5.5–54.6 | 40.2 | 859 | 826 | 0.74 | 0.57 | 0.5 | 0.16 |
| 2 | 3 | 2 | 22.4 | 8 | 77 | 0 | 8 | 8 | 32.5 | 9.2–43.3 | 34.3 | 414 | 630 | 0.36 | 0.41 | 0.44 | 0.79 |
| 3 | 3 | 4 | 32.5 | 20 | 60 | 0 | 0 | 20 | 46.8 | 33.0–54.7 | 27.4 | 159 | 435 | 0.18 | 0.18 | 0.73 | 0.95 |
| 4 | 2 | 1 | 24.0 | 67 | 33 | 0 | 0 | 0 | 33.3 | 5.0–50.2 | 58.2 | 668 | 1058 | 0.56 | 0.39 | 0.55 | 0.64 |
| 5 | 3 | 0 | 17.5 | 67 | 17 | 0 | 0 | 17 | 30.1 | 9.3–47.0 | 45.4 | 637 | 859 | 0.42 | 0.36 | 0.46 | 0.87 |
| 6 | 3 | 1 | 19.4 | 25 | 75 | 0 | 0 | 0 | 42.2 | 29.2–51.5 | 35.6 | 255 | 590 | 0.18 | 0.22 | 0.41 | 0.56 |
| 7 | 3 | 3 | 22.4 | 33 | 56 | 11 | 0 | 0 | 38.1 | 6.0–59.9 | 36.3 | 318 | 627 | 0.62 | 0.52 | 0.46 | 0.94 |
| 8 | 1 | 1 | 10.5 | 86 | 8 | 0 | 0 | 3 | 19.5 | 5.2–32.9 | 35.3 | 1178 | 793 | 0.4 | 0.33 | 0.5 | 0.52 |
| 9 | 3 | 2 | 23.1 | 50 | 25 | 12 | 0 | 12 | 49.6 | 33.3–59.2 | 49.3 | 255 | 766 | 0.19 | 0.21 | 0.59 | 1.21 |
| 10 | 2 | 0 | 47.1 | 0 | 100 | 0 | 0 | 0 | 22.6 | 5.3–43.4 | 28.2 | 700 | 598 | 0.66 | 0.57 | 0.5 | 0 |
| 11 | 3 | 3 | 24.0 | 55 | 45 | 0 | 0 | 0 | 43.8 | 5.3–58.0 | 52.7 | 350 | 860 | 0.36 | 0.3 | 0.7 | 0.69 |
| 12 | 3 | 1 | 14.2 | 64 | 36 | 0 | 0 | 0 | 37.7 | 14.6–50.7 | 39 | 350 | 676 | 0.31 | 0.28 | 0.48 | 0.66 |
| 13 | 2 | 0 | 34.2 | 44 | 48 | 0 | 0 | 0 | 24.9 | 5.1–42.6 | 41.7 | 859 | 852 | 0.73 | 0.5 | 0.47 | 0.96 |
| 14 | 2 | 0 | 41.4 | 50 | 36 | 7 | 0 | 7 | 33.3 | 9.8–51.4 | 38.9 | 446 | 707 | 0.38 | 0.36 | 0.6 | 1.09 |
| 15 | 2 | 0 | 25.7 | 39 | 56 | 0 | 0 | 0 | 21.8 | 5.0–46.5 | 48.8 | 1305 | 1049 | 0.78 | 0.49 | 0.42 | 0.84 |
| 16 | 2 | 0 | 36.4 | 0 | 11 | 0 | 0 | 0 | 28.0 | 6.0–42.6 | 29.4 | 477 | 572 | 0.53 | 0.43 | 0.46 | 0.35 |
| 17 | 3 | 2 | 20.7 | 14 | 43 | 0 | 24 | 19 | 36.5 | 6.0–59.2 | 69.8 | 668 | 1226 | 0.52 | 0.51 | 0.45 | 1.3 |
| 18 | 2 | 1 | 30.8 | 0 | 79 | 0 | 0 | 21 | 29.9 | 5.6–56.2 | 53.7 | 764 | 1019 | 0.66 | 0.51 | 0.46 | 0.51 |
| 19 | 2 | 0 | 32.5 | 0 | 100 | 0 | 0 | 0 | 20.8 | 5.3–38.9 | 37.8 | 1114 | 828 | 0.76 | 0.52 | 0.43 | 0 |
| 20 | 2 | 0 | 34.4 | 0 | 86 | 0 | 0 | 0 | 20.8 | 5.0–44.0 | 37.8 | 1114 | 828 | 0.58 | 0.5 | 0.43 | 0.51 |
| 21 | 3 | 0 | 28.7 | 0 | 75 | 0 | 0 | 0 | 26.0 | 6.0–49.3 | 32.2 | 605 | 646 | 0.68 | 0.5 | 0.36 | 0.56 |
| Step No. | Step/Substep | Software | Package/Function | Parameters | |||
|---|---|---|---|---|---|---|---|
| 1 | Registration of point cloud | GeoSLAM Hub | |||||
| 2 | Export in .las format | 100% of points time stamp: scan point color: none | |||||
| 1 | Export in .ply format | 3D Scanner App, Polycam, SiteScape | |||||
| 2a | Import, sphere fit, cloud transformation | Cloud-Compare | fit sphere, align | ||||
| 2b | Export in .las format | save | |||||
| 3 | Import data | R | lidR | readLAS() | filter = “-keep_circle 0 0 8” | ||
| 4 | Classify into ground points and non-ground points | lasground() | csf(class_threshold = 0.05, cloth_resolution = 0.2, rigidness = 1) | ||||
| 5 | Create DTM | grid_terrain() | res = 0.2, knnidw(k = 2000, p = 0.5) | ||||
| 6 | Normalize relative to DTM | lasnormalize() | |||||
| 7 | Remove ground points | lasfilter() | Classification = 1 | ||||
| 8 | Sample random point per voxel | TreeLS | tlsSample() | voxelize(spacing = 0.02) voxelize(spacing = 0.01) | |||
| 9a | Clustering 2D | calculate reachability of each point | dbscan | optics() | eps = 0.025 eps = 0.030 minPts = 90 minPts = 90 | ||
| 9b | DBSCAN clustering | extractDBSCAN() | eps_cl = 0.025 eps_cl = 0.030 | ||||
| 10 | Filter clusters | various functions in base | nr. of points ≥ 500 vertical extent ≥ 1.3 m vertical extent ≥ 1.0 m | ||||
| 11a | If (extension ≥ 0.22 m2) Clustering 3D | calculate reachability of each point | dbscan | optics() | eps = 0.025 minPts = 20 | ||
| 11b | DBSCAN clustering | extractDBSCAN() | eps_cl = 0.02 | ||||
| 11a | if (extension < 0.22 m2) Clustering 3D | calculate reachability of each point | dbscan | optics() | eps = 0.025 minPts = 18 | ||
| 11b | DBSCAN clustering | extractDBSCAN() | eps_cl = 0.023 | ||||
| 12 | Filter clusters | various functions in base | nr. of points ≥ 500 vertical extent ≥ 1.3 m 80% quantile intensity > 7900 vertical extent ≥ 1.0 m | ||||
| 13 | Stratification into 14 vertical layers | various functions in base | from 1 m to 2.625 m from 0.2 m to 1.825 m vertical extent = 0.15 m overlap = 0.025 m | ||||
| 14a | Preparing layers for diameter estimation | edci | circMclust() | nx = 25 ny = 25 nr = 5 | |||
| 14b | l | conicfit | EllipseDirectFit() | ||||
| 14c | if(diam. < 0.3 m) add buffer | various functions in base | + 0.06 m | ||||
| 14d | if(diam. ≥ 0.3 m) add buffer | various functions in base | + 0.09 m | ||||
| 15a | diameter estimation | edci | circMclust() | nx = 25 ny = 25 nr = 5 | |||
| 15b | conicfit | EllipseDirectFit() | |||||
| 15c | conicfit | LMcircleFit() | |||||
| 15d | mgcv | gam() predict() | s(angle, bs = “cc”) | ||||
| spatstat | area.owin() | ||||||
| 15e | mgcv | gam() predict() | te(angle, Z, bs = c(“cc”,”tp”)) Z = 1.3 m | ||||
| 15f | spatstat | area.owin() | |||||
| 16a | Check criteria for diameters for 6 out of 14 layers | sd XY position ( and ) | various functions in base | ≤0.01 m | |||
| 16b | sd diameter ( and ) | ≤0.0185 m | |||||
| 17 | Calculate final position at 1.3 m (from or ) | base | lm() | ||||
| 18 | Calculate final dbh at 1.3 m for all diameter fits | base | lm() | ||||
| 19 | Affine transformation of tree positions | vec2dtransf | AffineTransformation() | ||||
| 20 | Assign tree positions | spatstat | pppdist() | cutoff = 0.3 | |||
Appendix B
| dbh | PLS | 3D | Poly | Sites-Cape | PLS | 3D | Poly | Sites-Cape | PLS | 3D | Poly | Sites-Cape |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ≥5 cm | 98.10 | 84.49 | 76.67 | 81.41 | 2.11 | 2.47 | 0.53 | 1.35 | 95.27 | 81.80 | 76.39 | 80.21 |
| ≥10 cm | 99.52 | 97.33 | 90.65 | 95.06 | 2.58 | 2.55 | 0.60 | 1.40 | 95.71 | 94.37 | 90.18 | 93.62 |
| ≥15 cm | 100.00 | 98.06 | 94.68 | 97.26 | 3.10 | 2.80 | 0.68 | 1.87 | 95.07 | 94.76 | 93.89 | 95.11 |
| RMSE (cm)/RMSE (%) | Bias (cm)/Bias (%) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| dbh | Method | PLS | 3D | Poly | Sitescape | PLS | 3D | Poly | Sitescape |
| ≥5 cm | gam | 1.85 (6.98) | 3.12 (10.36) | 4.08 (13.76) | 3.20 (9.94) | −0.51 (−1.36) | −1.01 (−2.94) | 0.39 (3.04) | −1.31 (−3.26) |
| tegam | 1.78 (6.80) | 3.10 (10.26) | 4.70 (16.26) | 3.18 (9.93) | −0.21 (−0.26) | −1.06 (−3.11) | 0.58 (3.96) | −1.20 (−2.93) | |
| circ | 1.64 (5.98) | 3.11 (10.10) | 3.85 (13.23) | 3.39 (10.63) | −0.73 (−2.29) | −0.39 (−1.45) | 0.44 (2.96) | −0.90 (−1.94) | |
| circ2 | 1.73 (6.49) | 3.19 (10.61) | 4.05 (13.69) | 3.21 (9.97) | −0.54 (−1.50) | −1.04 (−2.92) | 0.36 (2.93) | −1.17 (−2.78) | |
| ell | 1.92 (7.46) | 3.11 (10.10) | 4.20 (13.92) | 3.20 (9.93) | −0.042 (0.58) | −1.03 (−3.00) | 0.28 (2.80) | −1.03 (−2.43) | |
| ≥10 cm | gam | 1.65 (5.06) | 3.18 (9.93) | 3.84 (12.15) | 3.20 (9.46) | −1.05 (−3.23) | −1.17 (−3.47) | 0.08 (1.52) | −1.28 (−3.16) |
| tegam | 1.50 (4.64) | 3.17 (9.91) | 3.80 (11.99) | 3.21 (9.56) | −0.73 (−2.28) | −1.18 (−3.43) | 0.04 (1.48) | −1.17 (−2.84) | |
| circ | 1.65 (5.01) | 3.18 (9.70) | 3.55 (11.38) | 3.41 (10.21) | −1.13 (−3.46) | −0.52 (−1.86) | 0.12 (1.39) | −0.83 (−1.77) | |
| circ2 | 1.64 (5.01) | 3.24 (10.14) | 3.80 (12.02) | 3.22 (9.55) | −1.01 (−3.10) | −1.20 (−3.46) | 0.05 (1.41) | −1.16 (−2.78) | |
| ell | 1.52 (4.68) | 3.18 (9.77) | 3.96 (12.39) | 3.20 (9.49) | −0.66 (−1.96) | −1.15 (−3.35) | 0.01 (1.48) | −1.03 (−2.46) | |
| ≥15 cm | gam | 1.78 (4.83) | 3.38 (9.40) | 3.09 (8.51) | 3.26 (8.80) | −1.28 (−3.49) | −1.52 (−4.17) | −0.87 (−1.79) | −1.38 (−3.32) |
| tegam | 1.56 (4.23) | 3.36 (9.34) | 3.14 (8.59) | 3.28 (8.89) | −1.00 (−2.74) | −1.52 (−4.13) | −0.83 (−1.62) | −1.28 (−3.05) | |
| circ | 1.77 (4.76) | 3.37 (9.17) | 2.88 (8.03) | 3.48 (9.48) | −1.32 (−3.60) | −0.79 (−2.38) | −0.80 (−1.78) | −0.89 (−1.96) | |
| circ2 | 1.77 (4.78) | 3.40 (9.44) | 3.05 (8.39) | 3.28 (8.87) | −1.24 (−3.38) | −1.56 (−4.26) | −0.90 (−1.88) | −1.26 (−2.99) | |
| ell | 1.60 (4.31) | 3.36 (9.22) | 3.29 (9.02) | 3.21 (8.63) | −0.98 (−2.64) | −1.46 (−3.93) | −0.92 (−1.73) | −1.08 (−2.44) | |
| Plot | pos (m) | time (min) | ||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PLS | 3D | Poly | Site | PLS | 3D | Poly | Site | PLS | 3D | Poly | Site | PLS | 3D | Poly | Site | PLS | 3D | Poly | Site | 3D | Poly | Site | 3D | Poly | Site | PLS | 3D | Poly | Site | |
| 1 | 100.0 | 90.0 | 70.0 | 80.0 | 0.0 | 0.0 | 12.5 | 11.1 | 100.0 | 90.0 | 60.00 | 70.0 | 1.53 | 3.04 | 4.58 | 2.73 | −0.96 | −1.10 | −0.98 | −1.63 | 0.07 | 0.06 | 0.05 | 0.14 | 0.19 | 0.15 | 4.5 | 8.2 | 9.1 | 7.9 |
| 2 | 100.0 | 100.0 | 100.0 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 100.0 | 100.0 | 100.0 | 1.02 | 2.04 | 3.50 | 4.09 | −0.75 | 1.50 | 2.25 | −0.44 | 0.05 | 0.04 | 0.05 | 0.24 | 0.17 | 0.06 | 3.6 | 8.3 | 6.8 | 7.4 |
| 3 | 100.0 | 100.0 | 100.0 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 100.0 | 100.0 | 100.0 | 2.69 | 2.36 | 2.56 | 3.49 | −2.40 | −1.83 | −1.91 | −3.46 | 0.05 | 0.05 | 0.05 | 0.04 | 0.12 | 0.09 | 7.2 | 6.9 | 6.3 | 6.0 |
| 4 | 100.0 | 100.0 | 100.0 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 100.0 | 100.0 | 100.0 | 1.93 | 4.14 | 1.70 | 3.24 | −1.43 | 0.87 | −0.17 | 0.50 | 0.05 | 0.05 | 0.07 | 0.15 | 0.12 | 0.20 | 3.8 | 7.3 | 7.7 | 7.6 |
| 5 | 100.0 | 92.3 | 100.0 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 92.3 | 100.0 | 100.0 | 0.69 | 9.18 | 4.00 | 2.09 | −0.17 | −2.24 | −0.38 | −0.57 | 0.03 | 0.03 | 0.04 | 0.13 | 0.17 | 0.22 | 3.5 | 9.7 | 8.7 | 7.8 |
| 6 | 100.0 | 100.0 | 83.3 | 100.0 | 0.0 | 14.3 | 0.0 | 0.0 | 100.0 | 83.3 | 83.3 | 100.0 | 1.44 | 3.63 | 1.08 | 4.00 | −0.86 | −3.05 | −0.28 | −1.82 | 0.07 | 0.04 | 0.09 | 0.13 | 0.12 | 0.26 | 3.3 | 7.2 | 6.5 | 6.9 |
| 7 | 100.0 | 100.0 | 100.0 | 100.0 | 37.5 | 0.0 | 0.0 | 0.0 | 40.0 | 100.0 | 100.0 | 100.0 | 2.54 | 2.20 | 4.41 | 1.67 | −1.76 | −0.77 | 2.57 | −0.41 | 0.04 | 0.04 | 0.06 | 0.09 | 0.15 | 0.24 | 3.7 | 6.6 | 6.5 | 6.8 |
| 8 | 100.0 | 94.1 | 88.2 | 94.1 | 0.0 | 0.0 | 0.0 | 5.9 | 100.0 | 94.1 | 88.2 | 88.2 | 1.10 | 1.15 | 4.45 | 1.57 | −0.94 | 0.16 | 3.63 | 0.67 | 0.04 | 0.04 | 0.04 | 0.06 | 0.10 | 0.17 | 2.9 | 9.2 | 7.1 | 8.2 |
| 9 | 100.0 | 100.0 | 80.0 | 80.0 | 0.0 | 16.7 | 0.0 | 0.0 | 100.0 | 80.0 | 80.0 | 80.0 | 2.54 | 1.85 | 3.46 | 4.58 | −2.01 | −1.43 | −2.64 | −4.38 | 0.06 | 0.07 | 0.10 | 0.07 | 0.08 | 0.45 | 3.3 | 5.5 | 6.1 | 6.2 |
| 10 | 100.0 | 100.0 | 100.0 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 100.0 | 100.0 | 100.0 | 1.62 | 2.14 | 4.28 | 2.04 | −1.44 | −0.44 | 1.74 | −0.22 | 0.08 | 0.04 | 0.15 | 0.15 | 0.07 | 0.34 | 4.0 | 9.2 | 8.9 | 9.6 |
| 11 | 100.0 | 100.0 | 66.7 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 100.0 | 66.7 | 100.0 | 2.35 | 3.77 | 6.67 | 3.68 | −1.16 | −0.67 | −4.13 | −1.91 | 0.12 | 0.09 | 0.06 | 0.10 | 0.02 | 0.07 | 3.5 | 7.3 | 7.1 | 6.9 |
| 12 | 100.0 | 80.0 | 100.0 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 80.0 | 100.0 | 100.0 | 1.17 | 6.44 | 6.64 | 6.82 | 0.17 | −4.58 | −4.57 | −5.50 | 0.06 | 0.05 | 0.06 | 0.15 | 0.21 | 0.23 | 3.1 | 7.1 | 6.9 | 7.7 |
| 13 | 100.0 | 87.5 | 100.0 | 100.0 | 0.0 | 0.0 | 0.00 | 0.0 | 100.0 | 87.5 | 100.0 | 100.0 | 1.19 | 3.13 | 4.01 | 3.84 | −0.90 | −2.18 | −1.79 | −1.09 | 0.05 | 0.06 | 0.11 | 0.05 | 0.15 | 0.26 | 3.8 | 8.9 | 8.1 | 8.9 |
| 14 | 100.0 | 100.0 | 100.0 | 83.3 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 100.0 | 100.0 | 83.3 | 1.69 | 2.41 | 2.22 | 2.97 | −1.20 | −0.97 | 1.13 | 0.58 | 0.05 | 0.07 | 0.10 | 0.07 | 0.05 | 0.31 | 3.6 | 5.8 | 5.6 | 6.4 |
| 15 | 100.0 | 100.0 | 100.0 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 100.0 | 100.0 | 100.0 | 1.76 | 1.48 | 3.34 | 3.49 | −1.52 | −0.23 | 0.94 | 1.68 | 0.04 | 0.05 | 0.05 | 0.09 | 0.09 | 0.18 | 3.2 | 8.3 | 8.2 | 7.8 |
| 16 | 100.0 | 100.0 | 90.0 | 90.0 | 16.7 | 0.0 | 0.0 | 0.0 | 80.0 | 100.0 | 90.0 | 90.0 | 2.06 | 2.23 | 3.16 | 4.12 | −1.40 | −1.25 | 2.26 | 2.96 | 0.04 | 0.05 | 0.13 | 0.07 | 0.12 | 0.59 | 2.9 | 6.9 | 7.4 | 6.5 |
| 17 | 100.0 | 100.0 | 85.7 | 100.0 | 0.0 | 12.5 | 0.0 | 12.5 | 100.0 | 85.7 | 85.7 | 85.7 | 1.96 | 3.74 | 7.11 | 4.25 | −1.69 | −1.84 | −3.78 | −3.35 | 0.04 | 0.04 | 0.08 | 0.11 | 0.10 | 0.18 | 3.5 | 6.9 | 6.2 | 6.97 |
| 18 | 100.0 | 100.0 | 88.9 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 100.0 | 88.9 | 100.0 | 1.01 | 4.26 | 4.50 | 1.27 | −0.71 | −2.76 | 1.27 | −0.79 | 0.06 | 0.04 | 0.10 | 0.12 | 0.15 | 0.13 | 4.2 | 7.5 | 6.5 | 7.75 |
| 19 | 100.0 | 100.0 | 100.0 | 88.9 | 0.0 | 10.0 | 0.0 | 0.0 | 100.0 | 88.9 | 100.0 | 88.9 | 1.30 | 1.40 | 3.40 | 2.74 | −0.88 | −0.21 | 1.49 | −2.06 | 0.06 | 0.06 | 0.05 | 0.18 | 0.17 | 0.16 | 3.7 | 8.6 | 8.5 | 8.08 |
| 20 | 90.0 | 100.0 | 60.0 | 80.0 | 0.0 | 0.0 | 0.0 | 0.0 | 90.0 | 100.0 | 60.0 | 80.0 | 1.23 | 3.28 | 2.72 | 2.05 | −0.94 | −1.77 | 0.25 | −0.41 | 0.04 | 0.04 | 0.06 | 0.08 | 0.09 | 0.16 | 4.2 | 9.1 | 6.8 | 7.67 |
| 21 | 100.0 | 100.0 | 90.9 | 100.0 | 0.0 | 0.0 | 0.0 | 0.0 | 100.0 | 100.0 | 90.9 | 100.0 | 1.82 | 2.87 | 5.45 | 2.55 | −0.79 | 0.67 | 3.25 | −0.01 | 0.04 | 0.07 | 0.05 | 0.09 | 0.07 | 0.13 | 3.6 | 8.7 | 8.7 | 7.27 |
Appendix C


References
- Kershaw, J.A.; Ducey, M.J.; Beers, T.W.; Husch, B. Forest Mensuration; John Wiley & Sons, Ltd.: Chichester, UK, 2016; ISBN 9781118902028. [Google Scholar]
- Köhl, M.; Magnussen, S.; Marchetti, M. Sampling Methods, Remote Sensing and GIS Multiresource Forest Inventory; Tropical Forestry; Springer Berlin Heidelberg: Berlin, Heidelberg, 2006; ISBN 978-3-540-32571-0. [Google Scholar]
- Kauffman, J.B.; Arifanti, V.B.; Basuki, I.; Kurnianto, S.; Novita, N.; Murdiyarso, D.; Donato, D.C.; Warren, M.W. Protocols for the Measurement, Monitoring, and Reporting of Structure, Biomass, Carbon Stocks and Greenhouse Gas Emissions in Tropical Peat Swamp Forests; Center for International Forestry Research (CIFOR): Bogor, Indonesia, 2017. [Google Scholar]
- Kramer, H.; Akça, A. Leitfaden zur Waldmesslehre, 5th ed.; Sauerländer, J D: Frankfurt/Main, Germany, 1995; ISBN 3793908305. [Google Scholar]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Ritter, T.; Schwarz, M.; Tockner, A.; Leisch, F.; Nothdurft, A. Automatic mapping of forest stands based on three-dimensional point clouds derived from terrestrial laser-scanning. Forests 2017, 8, 265. [Google Scholar] [CrossRef]
- Piermattei, L.; Karel, W.; Wang, D.; Wieser, M.; Mokroš, M.; Surový, P.; Koreň, M.; Tomaštík, J.; Pfeifer, N.; Hollaus, M. Terrestrial Structure from Motion Photogrammetry for Deriving Forest Inventory Data. Remote Sens. 2019, 11, 950. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Kukko, A.; Hyyppä, J.; Lehtomäki, M.; Pyörälä, J.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Wang, Y. In-situ measurements from mobile platforms: An emerging approach to address the old challenges associated with forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 143, 97–107. [Google Scholar] [CrossRef]
- Tomaštík, J.; Saloň, Š.; Tunák, D.; Chudý, F.; Kardoš, M. Tango in forests—An initial experience of the use of the new Google technology in connection with forest inventory tasks. Comput. Electron. Agric. 2017, 141, 109–117. [Google Scholar] [CrossRef]
- Strahler, A.H.; Jupp, D.L.; Woodcock, C.E.; Schaaf, C.B.; Yao, T.; Zhao, F.; Yang, X.; Lovell, J.; Culvenor, D.; Newnham, G.; et al. Retrieval of forest structural parameters using a ground-based lidar instrument (Echidna®). Can. J. Remote Sens. 2008, 34, S426–S440. [Google Scholar] [CrossRef] [Green Version]
- Moskal, L.M.; Zheng, G. Retrieving forest inventory variables with terrestrial laser scanning (TLS) in urban heterogeneous forest. Remote Sens. 2012, 4, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Schilling, A.; Schmidt, A.; Maas, H.-G. Tree Topology Representation from TLS Point Clouds Using Depth-First Search in Voxel Space. Photogramm. Eng. Remote Sens. 2012, 78, 383–392. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Wassermann, C.; Nothdurft, A. Influence of Scanner Position and Plot Size on the Accuracy of Tree Detection and Diameter Estimation Using Terrestrial Laser Scanning on Forest Inventory Plots. Remote Sens. 2019, 11, 1602. [Google Scholar] [CrossRef] [Green Version]
- Ritter, T.; Gollob, C.; Nothdurft, A. Towards an optimization of sample plot size and scanner position layout for terrestrial laser scanning in multi-scan mode. Forests 2020, 11, 1099. [Google Scholar] [CrossRef]
- Watt, P.J.; Donoghue, D.N.M. Measuring forest structure with terrestrial laser scanning. Int. J. Remote Sens. 2005, 26, 1437–1446. [Google Scholar] [CrossRef]
- Maas, H.-G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Vonderach, C.; Vögtle, T.; Adler, P.; Norra, S. Terrestrial laser scanning for estimating urban tree volume and carbon content. Int. J. Remote Sens. 2012, 33, 6652–6667. [Google Scholar] [CrossRef]
- Liu, J.; Liang, X.; Hyyppä, J.; Yu, X.; Lehtomäki, M.; Pyörälä, J.; Zhu, L.; Wang, Y.; Chen, R. Automated matching of multiple terrestrial laser scans for stem mapping without the use of artificial references. Int. J. Appl. Earth Obs. Geoinf. 2017, 56, 13–23. [Google Scholar] [CrossRef] [Green Version]
- Ritter, T.; Nothdurft, A. Automatic assessment of crown projection area on single trees and stand-level, based on three-dimensional point clouds derived from terrestrial laser-scanning. Forests 2018, 9, 237. [Google Scholar] [CrossRef] [Green Version]
- Henning, J.G.; Radtke, P.J. Detailed Stem Measurements of Standing Trees from Ground-Based Scanning Lidar. For. Sci. 2006, 52, 67–80. [Google Scholar] [CrossRef]
- Moorthy, I.; Miller, J.R.; Berni, J.A.J.; Zarco-Tejada, P.; Hu, B.; Chen, J. Field characterization of olive (Olea europaea L.) tree crown architecture using terrestrial laser scanning data. Agric. For. Meteorol. 2011, 151, 204–214. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Surový, P.; Kuželka, K. Accuracy of Structure from Motion models in comparison with terrestrial laser scanner for the analysis of DBH and height influence on error behaviour. J. For. Sci. 2016, 62, 357–365. [Google Scholar] [CrossRef] [Green Version]
- Mikita, T.; Janata, P.; Surový, P.; Hyyppä, J.; Liang, X.; Puttonen, E. Forest Stand Inventory Based on Combined Aerial and Terrestrial Close-Range Photogrammetry. Forests 2016, 7, 165. [Google Scholar] [CrossRef] [Green Version]
- Mokroš, M.; Liang, X.; Surový, P.; Valent, P.; Čerňava, J.; Chudý, F.; Tunák, D.; SaloňSaloSaloň, Š.; Merganič, J. Geo-Information Evaluation of Close-Range Photogrammetry Image Collection Methods for Estimating Tree Diameters. ISPRS Int. J. Geo-Inf. 2018, 7, 93. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Feng, Z.; Yang, L.; Mannan, A.; Khan, T.U.; Zhao, Z.; Cheng, Z. Extraction of sample plot parameters from 3D point cloud reconstruction based on combined RTK and CCD continuous photography. Remote Sens. 2018, 10, 1299. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Jaakkola, A.; Wang, Y.; Hyyppä, J.; Honkavaara, E.; Liu, J.; Kaartinen, H. The use of a hand-held camera for individual tree 3D mapping in forest sample plots. Remote Sens. 2014, 6, 6587–6603. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Wang, Y.; Jaakkola, A.; Kukko, A.; Kaartinen, H.; Hyyppa, J.; Honkavaara, E.; Liu, J. Forest Data Collection Using Terrestrial Image-Based Point Clouds From a Handheld Camera Compared to Terrestrial and Personal Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5117–5132. [Google Scholar] [CrossRef]
- Mokros, M.; Polat, N.; Stovall, A.; Wang, D.; Wang, J. International Benchmarking of Terrestrial Image-Based Point Clouds for Forestry-ISPRS Scientific Initiative 2019-Final Report Final Report International Benchmarking of Terrestrial Image-Based Point Clouds for Forestry ISPRS Scientific Initiative 2019. 2020. Available online: https://www.google.at/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwjkg8Sp5ZvyAhVLPOwKHXmNARoQFnoE-CAoQAw&url=https%3A%2F%2Fwww.isprs.org%2Fsociety%2Fsi%2FSI-2019%2FTC3-Report_International_Benchmarking_of_terrestrial_Image-based_Point_Clouds_for_Forestry.pdf&usg=AOvVaw2cSlL6d-v2QODGfm7vQIu- (accessed on 21 June 2021).
- Maltamo, M.; Næsset, E.; Vauhkonen, J. Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies. Manag. For. Ecosyst. 2014, 27, 3–41. [Google Scholar]
- Lindberg, E.; Hollaus, M. Comparison of methods for estimation of stem volume, stem number and basal area from airborne laser scanning data in a hemi-boreal forest. Remote Sens. 2012, 4, 1004–1023. [Google Scholar] [CrossRef] [Green Version]
- Korhonen, L.; Vauhkonen, J.; Virolainen, A.; Hovi, A.; Korpela, I. Estimation of tree crown volume from airborne lidar data using computational geometry. Int. J. Remote Sens. 2013, 34, 7236–7248. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Næsset, E.; Gobakken, T. Deriving airborne laser scanning based computational canopy volume for forest biomass and allometry studies. ISPRS J. Photogramm. Remote Sens. 2014, 96, 57–66. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Kaartinen, H.; Maltamo, M. Automatic detection of harvested trees and determination of forest growth using airborne laser scanning. Remote Sens. Environ. 2004, 90, 451–462. [Google Scholar] [CrossRef]
- Brede, B.; Calders, K.; Lau, A.; Raumonen, P.; Bartholomeus, H.M.; Herold, M.; Kooistra, L. Non-destructive tree volume estimation through quantitative structure modelling: Comparing UAV laser scanning with terrestrial LIDAR. Remote Sens. Environ. 2019, 233. [Google Scholar] [CrossRef]
- Puliti, S.; Dash, J.P.; Watt, M.S.; Breidenbach, J.; Pearse, G.D. A comparison of UAV laser scanning, photogrammetry and airborne laser scanning for precision inventory of small-forest properties. For. An Int. J. For. Res. 2019. [Google Scholar] [CrossRef]
- Brede, B.; Lau, A.; Bartholomeus, H.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR Derived Canopy Height and DBH with Terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef]
- Li, J.; Yang, B.; Cong, Y.; Cao, L.; Fu, X.; Dong, Z. 3D forest mapping using a low-cost UAV laser scanning system: Investigation and comparison. Remote Sens. 2019, 11, 717. [Google Scholar] [CrossRef] [Green Version]
- Bruggisser, M.; Hollaus, M.; Kükenbrink, D.; Pfeifer, N. Comparison of forest structure metrics derived from UAV lidar and ALS data. In ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences; Copernicus GmbH: Göttingen, Germany, 2019; Volume 4, pp. 325–332. [Google Scholar]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAV LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S.; Solberg, S.; Granhus, A. Use of UAV Photogrammetric Data for Estimation of Biophysical Properties in Forest Stands Under Regeneration. Remote Sens. 2019, 11, 233. [Google Scholar] [CrossRef] [Green Version]
- Krause, S.; Sanders, T.G.M.; Mund, J.-P.; Greve, K. UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring. Remote Sens. 2019, 11, 758. [Google Scholar] [CrossRef] [Green Version]
- Surový, P.; Almeida Ribeiro, N.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- Liang, X.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Yu, X.; Jaakkola, A.; Wang, Y. Possibilities of a Personal Laser Scanning System for Forest Mapping and Ecosystem Services. Sensors 2014, 14, 1228–1248. [Google Scholar] [CrossRef] [PubMed]
- Maltamo, M.; Bollandsas, O.M.; Naesset, E.; Gobakken, T.; Packalen, P. Different plot selection strategies for field training data in ALS-assisted forest inventory. Forestry 2011, 84, 23–31. [Google Scholar] [CrossRef] [Green Version]
- Holopainen, M.; Kankare, V.; Vastaranta, M.; Liang, X.; Lin, Y.; Vaaja, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H.; et al. Tree mapping using airborne, terrestrial and mobile laser scanning–A case study in a heterogeneous urban forest. Urban For. Urban Green. 2013, 12, 546–553. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppa, J.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Yu, X. The Use of a Mobile Laser Scanning System for Mapping Large Forest Plots. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1504–1508. [Google Scholar] [CrossRef]
- Ryding, J.; Williams, E.; Smith, M.; Eichhorn, M. Assessing Handheld Mobile Laser Scanners for Forest Surveys. Remote Sens. 2015, 7, 1095–1111. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Liu, H.; Feng, Z.; Shen, C.; Chen, P. Applicability of personal laser scanning in forestry inventory. PLoS ONE 2019, 14, e0211392. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Nothdurft, A. Forest Inventory with Long Range and High-Speed Personal Laser Scanning (PLS) and Simultaneous Localization and Mapping (SLAM) Technology. Remote Sens. 2020, 12, 1509. [Google Scholar] [CrossRef]
- Balenović, I.; Liang, X.; Jurjević, L.; Hyyppä, J.; Seletković, A.; Kukko, A. Hand-held personal laser scanning–current status and perspectives for forest inventory application. Croat. J. For. Eng. 2020, 42, 165–183. [Google Scholar] [CrossRef]
- Hyyppä, J.; Virtanen, J.P.; Jaakkola, A.; Yu, X.; Hyyppä, H.; Liang, X. Feasibility of Google Tango and kinect for crowdsourcing forestry information. Forests 2017, 9, 6. [Google Scholar] [CrossRef] [Green Version]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef] [Green Version]
- Engelhard, N.; Endres, F.; Hess, J.; Sturm, J.; Burgard, W. Real-time 3D visual SLAM with a hand-held RGB-D camera Input: Stream of RGB-D images. In Proceedings of the RGB-D Workshop on 3D Perception in Robotics at the European Robotics Forum, Vasteras, Sweden, 6–8 April 2011. [Google Scholar]
- Ostovar, A. Enhancing Forestry Object Detection using Multiple Features. Master’s Thesis, Umeå University, Faculty of Science and Technology, Umeå, Sweden, 2011. [Google Scholar]
- Pordel, M.; Hellström, T.; Ostovar, A. Integrating kinect depth data with a stochastic object classification framework for forestry robots. In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics, Rome, Italy, 28–31 July 2012; Volume 2, pp. 314–320. [Google Scholar] [CrossRef]
- Brouwer, T. Low Budget Ranging for Forest Management: A Microsoft Kinect Study. Master’s Thesis, Wageningen University and Research Centre, Wageningen, The Netherlands, 2013. [Google Scholar]
- Azure Kinect DK–Develop AI Models|Microsoft Azure. Available online: https://azure.microsoft.com/en-us/services/kinect-dk/ (accessed on 16 April 2021).
- Kinect-Windows App Development. Available online: https://developer.microsoft.com/en-us/windows/kinect/ (accessed on 16 April 2021).
- Lenovo Phab 2 Pro|Google Tango-Enabled Smartphone|Lenovo UK. Available online: https://www.lenovo.com/gb/en/tango/ (accessed on 16 April 2021).
- iPad Pro-Apple. Available online: https://www.apple.com/ipad-pro/ (accessed on 19 April 2021).
- iPhone 12 Pro and iPhone 12 Pro Max-Apple. Available online: https://www.apple.com/iphone-12-pro/ (accessed on 19 April 2021).
- Vogt, M.; Rips, A.; Emmelmann, C. Comparison of iPad Pro®’s LiDAR and TrueDepth Capabilities with an Industrial 3D Scanning Solution. Technologies 2021, 9, 25. [Google Scholar] [CrossRef]
- Heinrichs, B.E.; Yang, M. Bias and Repeatability of Measurements from 3D Scans Made Using iOS-Based Lidar. SAE Tech. Paper 2021. [Google Scholar] [CrossRef]
- Schodterer, H. Einrichtung eines permanenten Stichprobennetzes im Lehrforst. Master’s Thesis, University of Natural Resources and Life Sciences, Austria, Vienna, 1987. [Google Scholar]
- Bitterlich, W. Die Winkelzählprobe. Allg. Forst Holzwirtsch. Ztg. 1948, 59, 4–5. [Google Scholar] [CrossRef]
- Bitterlich, W. Die Winkelzählprobe. Forstwiss. Cent. 1952, 71, 215–225. [Google Scholar] [CrossRef]
- Bitterlich, W. The Relascope Idea. Relative Measurements in Forestry; Commonwealth Agricultural Bureau: Wallingford, UK, 1984; ISBN 0851985394. [Google Scholar]
- Reineke, L.H. Perfecting a stand-density index for evenage forests. J. Agric. Res. 1933, 46, 627–638. [Google Scholar]
- Fueldner, K. Strukturbeschreibung von Buchen-Edellaubholz-Mischwäldern. Ph.D. Thesis, Georg-August-Universitaet, Goettingen, Germany, 1995. [Google Scholar]
- Clark, P.J.; Evans, F.C. Distance to Nearest Neighbor as a Measure of Spatial Relationships in Populations. Ecology 1954, 35, 445–453. [Google Scholar] [CrossRef]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]
- Breaking Down iPad Pro 11’s LiDAR Scanner|EE Times. Available online: https://www.eetimes.com/breaking-down-ipad-pro-11s-lidar-scanner/# (accessed on 21 June 2021).
- Apple ARKit-Augmented Reality-Apple Developer. Available online: https://developer.apple.com/augmented-reality/arkit/ (accessed on 21 April 2021).
- Laan Labs 3D Scanner App-LIDAR Scanner for iPad & iPhone Pro. Available online: https://www.3dscannerapp.com/ (accessed on 21 April 2021).
- Polycam-LiDAR 3D Scanner. Available online: https://poly.cam/ (accessed on 21 April 2021).
- SiteScape. Available online: https://www.sitescape.ai/ (accessed on 21 April 2021).
- LiDAR Scanner 3D—3D Reconstruction on 2020 iPad Pros with LiDAR. Available online: https://lidarscanner.app/ (accessed on 13 May 2021).
- Heges—The iOS 3D Scanner App|Using FaceID or LiDAR to Make Scans. Available online: https://hege.sh/ (accessed on 13 May 2021).
- Lidar Camera on the AppStore. Available online: https://apps.apple.com/us/app/lidar-camera/id1516495709 (accessed on 13 May 2021).
- 3Dim Capture App|Description and pricing. Available online: https://www.3dim.ai/capture (accessed on 13 May 2021).
- Forge-3D Scanner. Available online: https://www.forge.cam/ (accessed on 13 May 2021).
- ZEB Horizon-GeoSLAM. Available online: https://geoslam.com/solutions/zeb-horizon/ (accessed on 13 January 2020).
- Gollob, C.; Ritter, T.; Nothdurft, A. Comparison of 3D point clouds obtained by terrestrial laser scanning and personal laser scanning on forest inventory sample plots. Data 2020, 5, 103. [Google Scholar] [CrossRef]
- Polygon File Format (PLY) Family. Available online: https://www.loc.gov/preservation/digital/formats/fdd/fdd000501.shtml (accessed on 1 May 2021).
- iTunes-Apple. Available online: https://www.apple.com/itunes/ (accessed on 30 April 2021).
- Hub-GeoSLAM. Available online: https://geoslam.com/solutions/geoslam-hub/ (accessed on 13 January 2020).
- LAS (LASer) File Format, Version 1.4. Available online: https://www.loc.gov/preservation/digital/formats/fdd/fdd000418.shtml (accessed on 20 February 2020).
- Girardeau-Montaut, D.C. 3D Point Cloud and Mesh Processing Software; Telecom ParisTechs: Palaiseau, France, 2017. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Version 3.5.1; R Foundation for Statistical Computing: Vienna, Austria, 2020. [Google Scholar]
- CRAN—Package vec2dtransf. Available online: https://cran.r-project.org/web/packages/vec2dtransf/index.html (accessed on 13 January 2021).
- Baddeley, A.; Turner, R. spatstat: An R package for analyzing spatial point patterns. J. Stat. Softw. 2005, 12, 1–42. [Google Scholar] [CrossRef] [Green Version]
- Giannetti, F.; Puletti, N.; Quatrini, V.; Travaglini, D.; Bottalico, F.; Corona, P.; Chirici, G. Integrating terrestrial and airborne laser scanning for the assessment of single-tree attributes in Mediterranean forest stands. Eur. J. Remote Sens. 2018, 51, 795–807. [Google Scholar] [CrossRef] [Green Version]
- Dai, W.; Yang, B.; Liang, X.; Dong, Z.; Huang, R.; Wang, Y.; Li, W. Automated fusion of forest airborne and terrestrial point clouds through canopy density analysis. ISPRS J. Photogramm. Remote Sens. 2019, 156, 94–107. [Google Scholar] [CrossRef]
- McGlade, J.; Wallace, L.; Hally, B.; White, A.; Reinke, K.; Jones, S. An early exploration of the use of the Microsoft Azure Kinect for estimation of urban tree Diameter at Breast Height. Remote Sens. Lett. 2020, 11, 963–972. [Google Scholar] [CrossRef]
- Mokroš, M.; Výbošt’ok, J.; Tomaštík, J.; Grznárová, A.; Valent, P.; Slavík, M.; Merganič, J. High precision individual tree diameter and perimeter estimation from close-range photogrammetry. Forests 2018, 9, 696. [Google Scholar] [CrossRef] [Green Version]
- Fan, Y.; Feng, Z.; Shen, C.; Khan, T.U.; Mannan, A.; Gao, X.; Chen, P.; Saeed, S. A trunk-based SLAM backend for smartphones with online SLAM in large-scale forest inventories. ISPRS J. Photogramm. Remote Sens. 2020, 162, 41–49. [Google Scholar] [CrossRef]
- Rönnholm, P.; Liang, X.; Kukko, A.; Jaakkola, A.; Hyyppä, J. Quality Analysis and Correction of Mobile Backpack Laser Scanning Data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-1, 41–47. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Chen, Y.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Khoramshahi, E.; Hakala, T.; Hyyppä, J.; Holopainen, M.; Hyyppä, H.; et al. SLAM-Aided Stem Mapping for Forest Inventory with Small-Footprint Mobile LiDAR. Forests 2015, 6, 4588–4606. [Google Scholar] [CrossRef] [Green Version]














| # of Sample Plots | 21 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| # of Trees | 424 | ||||||||
| # of Trees/Sample Plot | 20.2 | ||||||||
| dbh Range (cm) | 5.0–59.9 | ||||||||
| Mean | SD | Min | Max | q (0.05) | q (0.25) | q (0.5) | q (0.75) | q (0.95) | |
| (%) | 27.1 | 8.9 | 10.5 | 47.1 | 14.2 | 22.4 | 25.7 | 32.5 | 41.4 |
| (cm) | 31.6 | 9.0 | 19.5 | 49.6 | 20.8 | 24.4 | 30.1 | 37.7 | 46.8 |
| (m2/ha) | 41.5 | 10.7 | 27.4 | 69.8 | 28.2 | 35.3 | 38.9 | 48.8 | 58.2 |
| (trees/ha) | 643 | 333 | 159 | 1305 | 255 | 350 | 637 | 859 | 1178 |
| (trees/ha) | 783 | 193 | 435 | 1226 | 572 | 630 | 793 | 859 | 1058 |
| 0.50 | 0.20 | 0.18 | 0.78 | 0.18 | 0.36 | 0.53 | 0.66 | 0.76 | |
| 0.41 | 0.12 | 0.18 | 0.57 | 0.21 | 0.33 | 0.43 | 0.51 | 0.57 | |
| 0.50 | 0.09 | 0.36 | 0.73 | 0.41 | 0.44 | 0.46 | 0.50 | 0.70 | |
| 0.67 | 0.36 | 0 | 1.30 | 0 | 0.51 | 0.66 | 0.94 | 1.21 | |
| Shape | Material | Diameter (cm) | |
|---|---|---|---|
| Object 1 | cylinder | plastic | 49.9 |
| Object 2 | cylinder | metal | 40.0 |
| Object 3 | cylinder | metal | 26.4 |
| Object 4 | cylinder | plastic | 16.0 |
| Object 5 | cylinder | metal | 11.5 |
| Object 6 | cylinder | plastic | 6.5 |
| Object | Reference Diameter (cm) | 3D Scanner App | Polycam | SiteScape | PLS | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Scan Time: 4.7 min | Scan Time: 4.3 min | Scan Time: 3.9 min | Scan Time: 1 min | ||||||||||
| circ2 (cm) | gam (cm) | circ2 (cm) | gam (cm) | circ2 (cm) | gam (cm) | circ2 (cm) | gam (cm) | ||||||
| Object 1 | 49.90 | −5.48 | −5.61 | 0.76 | 4.98 | 4.93 | 0.43 | −0.49 | −0.98 | 1.60 | −0.70 | −0.69 | 0.95 |
| Object 2 | 40.00 | 0.44 | 0.44 | 0.15 | −4.51 | −4.62 | 0.18 | 0.48 | 0.37 | 1.16 | −0.24 | −0.23 | 1.09 |
| Object 3 | 26.40 | −1.59 | −1.56 | 0.13 | −1.87 | −1.99 | 0.16 | −5.36 | −5.42 | 1.52 | −0.33 | −0.34 | 0.86 |
| Object 4 | 16.00 | −2.28 | −2.27 | 0.95 | 0.25 | 0.27 | 0.10 | −5.47 | −5.51 | 1.04 | 0.05 | 0.04 | 0.11 |
| Object 5 | 11.50 | −0.32 | −0.33 | 0.05 | 0.85 | 0.80 | 0.11 | −4.81 | −4.81 | 1.16 | −0.40 | −0.40 | 0.86 |
| Object 6 | 6.50 | 0.74 | 0.73 | 0.09 | −1.71 | −1.81 | 0.28 | −1.41 | −1.65 | 1.16 | −0.44 | −0.52 | 0.83 |
| Reference | Method/Technology | Single/Multiple Trees | Detection Rate (%) | Commission Rate (%) | dbh RMSE (cm) | dbh Bias (cm) | Tree Location RMSE (cm) | DTM RMSE (cm) |
|---|---|---|---|---|---|---|---|---|
| This study | iPad/3D Scanner App | multiple | 97.33 | 2.55 | 3.64 | −0.87 | 10.9 | 5.3 |
| iPad/Polycam | multiple | 90.65 | 0.60 | 4.51 | 1.03 | 11.9 | 5.1 | |
| iPad/SiteScape | multiple | 94.68 | 1.40 | 3.13 | −0.58 | 21.8 | 7.2 | |
| PLS/GeoSLAM ZEB HORIZON | multiple | 99.52 | 2.58 | 1.59 | 0.22 | |||
| Tomaštík et al. [10] | Tango/Lenovo Phab 2 Pro | multiple | 1.15 | 20.0 | ||||
| CRP/Canon EOS 5D Mark II | multiple | 1.83 | 4.0 | |||||
| Hyyppä et al. [52] | Tango/Lenovo Phab 2 Pro | single | 0.73 | 0.33 | ||||
| Kinect/regular computer | single | 1.90 | 0.54 | |||||
| Brouwer [57] | Kinect/regular laptop | multiple | 83.75 | 12.25 | 1.30 | |||
| TLS/Riegl VZ-400 | multiple | 91.75 | 5.25 | 0.74 | ||||
| McGlade et al. [95] | Azure Kinect/regular laptop | single | 8.43 | 2.05 | ||||
| Fan et al. [97] | RTAB-Map/Lenovo Phab 2 Pro | multiple | 47.7 | |||||
| Trunk-based Backend/Lenovo Phab 2 Pro | multiple | 8.3 | ||||||
| Mokroš et al. [96] | CRP/Canon 70D non-fisheye lens | single | 0.42–0.71 | |||||
| CRP/Canon 70D fisheye lens | single | 0.39–0.60 | ||||||
| Piermattei et al. [8] | CRP/Nikon D800 | multiple | 84.25 | 9.17 | 3.09 | −1.11 | 4.07 | |
| TLS/Riegl VZ-2000 | multiple | 93.75 | 14.40 | 1.78 | −0.70 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Nothdurft, A. Measurement of Forest Inventory Parameters with Apple iPad Pro and Integrated LiDAR Technology. Remote Sens. 2021, 13, 3129. https://doi.org/10.3390/rs13163129
Gollob C, Ritter T, Kraßnitzer R, Tockner A, Nothdurft A. Measurement of Forest Inventory Parameters with Apple iPad Pro and Integrated LiDAR Technology. Remote Sensing. 2021; 13(16):3129. https://doi.org/10.3390/rs13163129
Chicago/Turabian StyleGollob, Christoph, Tim Ritter, Ralf Kraßnitzer, Andreas Tockner, and Arne Nothdurft. 2021. "Measurement of Forest Inventory Parameters with Apple iPad Pro and Integrated LiDAR Technology" Remote Sensing 13, no. 16: 3129. https://doi.org/10.3390/rs13163129
APA StyleGollob, C., Ritter, T., Kraßnitzer, R., Tockner, A., & Nothdurft, A. (2021). Measurement of Forest Inventory Parameters with Apple iPad Pro and Integrated LiDAR Technology. Remote Sensing, 13(16), 3129. https://doi.org/10.3390/rs13163129