
Improving Potato Yield Prediction by Combining Cultivar Information and UAV Remote Sensing Data Using Machine Learning


 ,
,  , , , , and
, , , , and 
Abstract
:1. Introduction
2. Materials and Methods
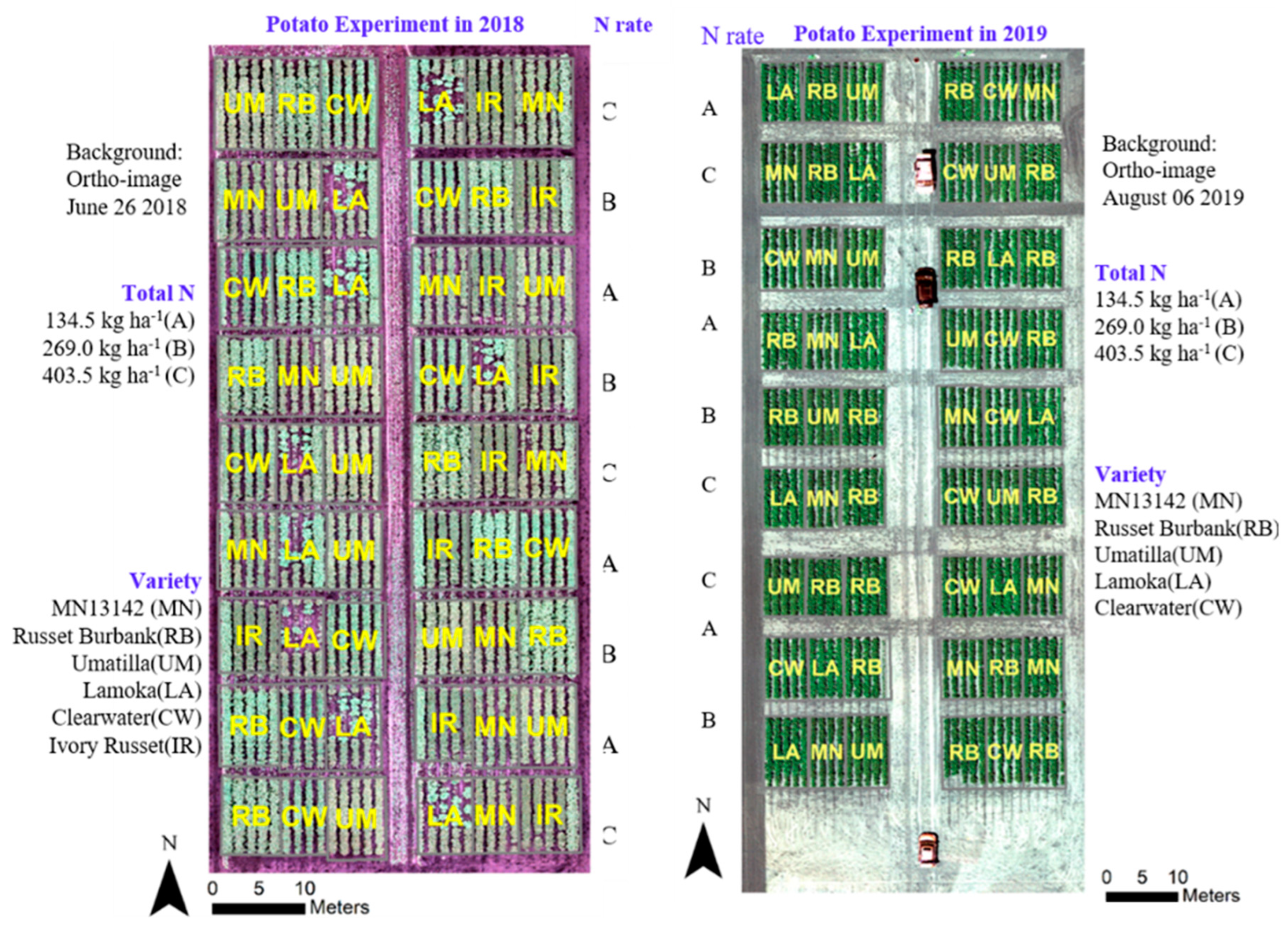
2.1. Small-Plot N x Cultivar Study
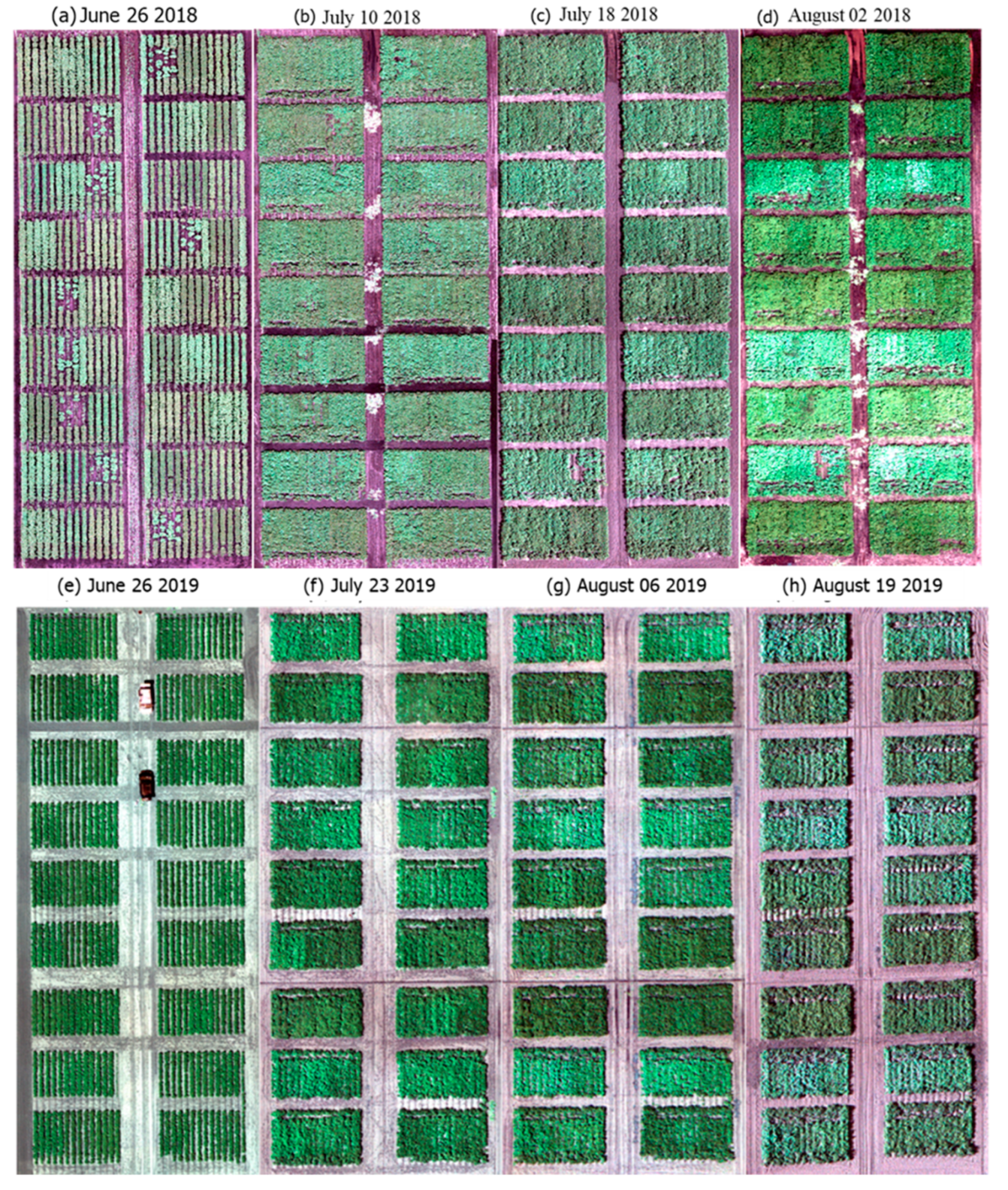
2.2. UAV System and Flight Parameters
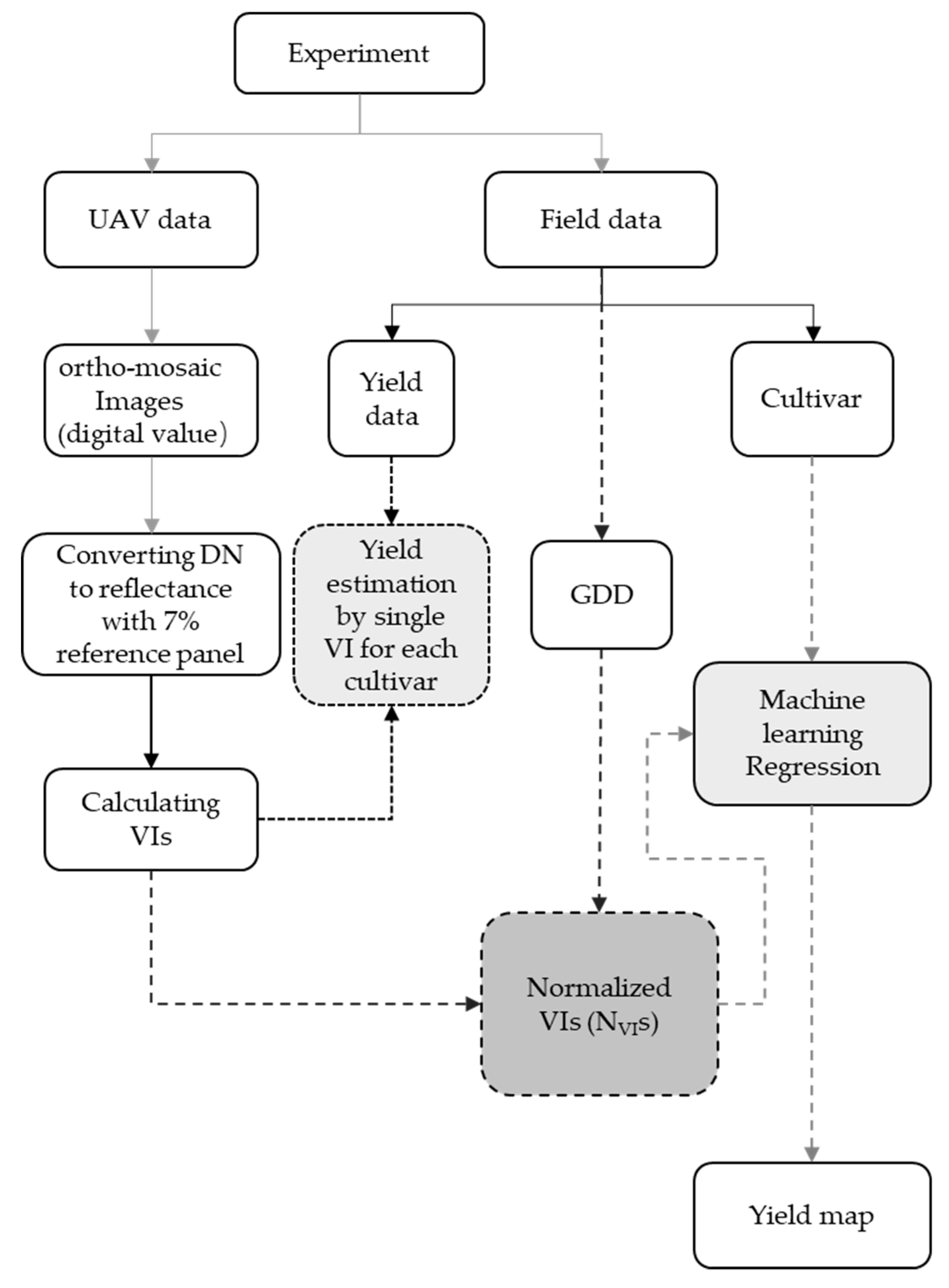
2.3. Data Analysis
3. Results
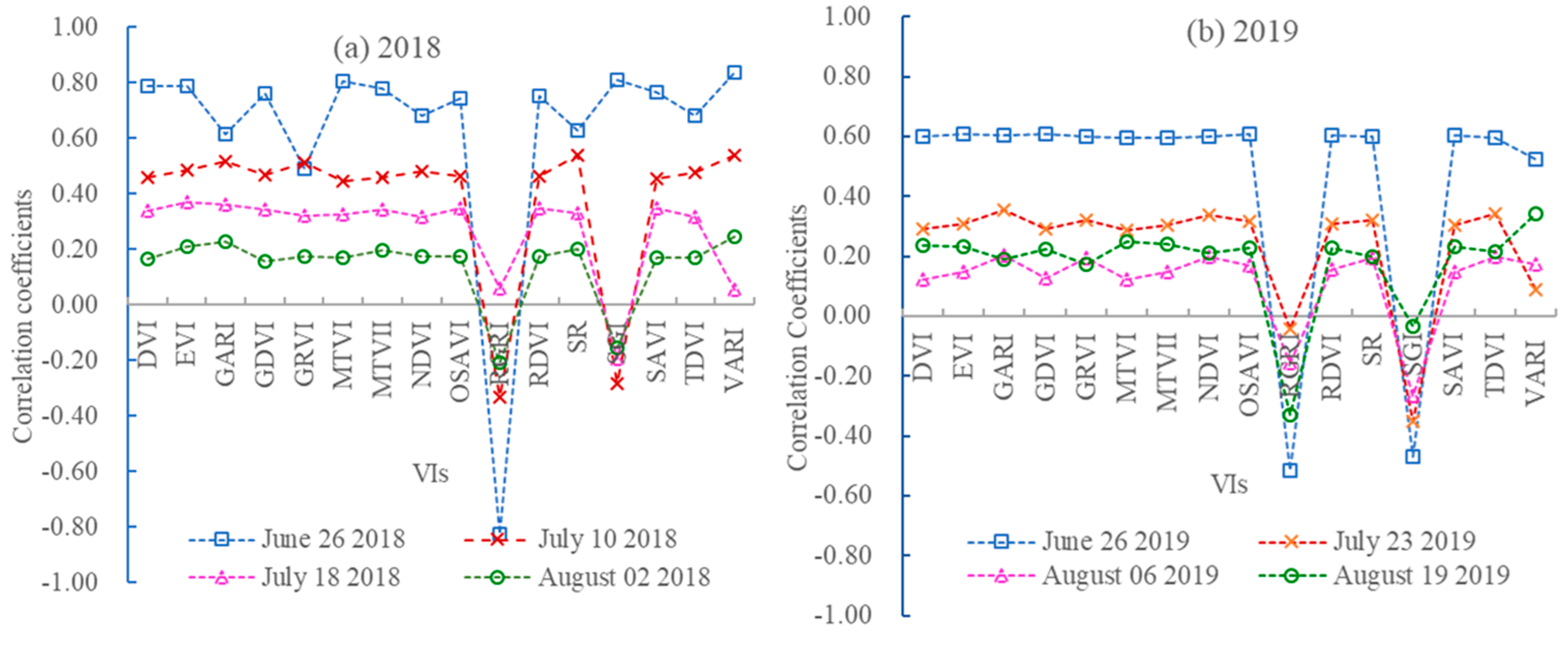
3.1. Correlation Analysis between Potato Tuber Yield and VIs
3.2. Simple Regression Models for Potato Tuber Yield Prediction
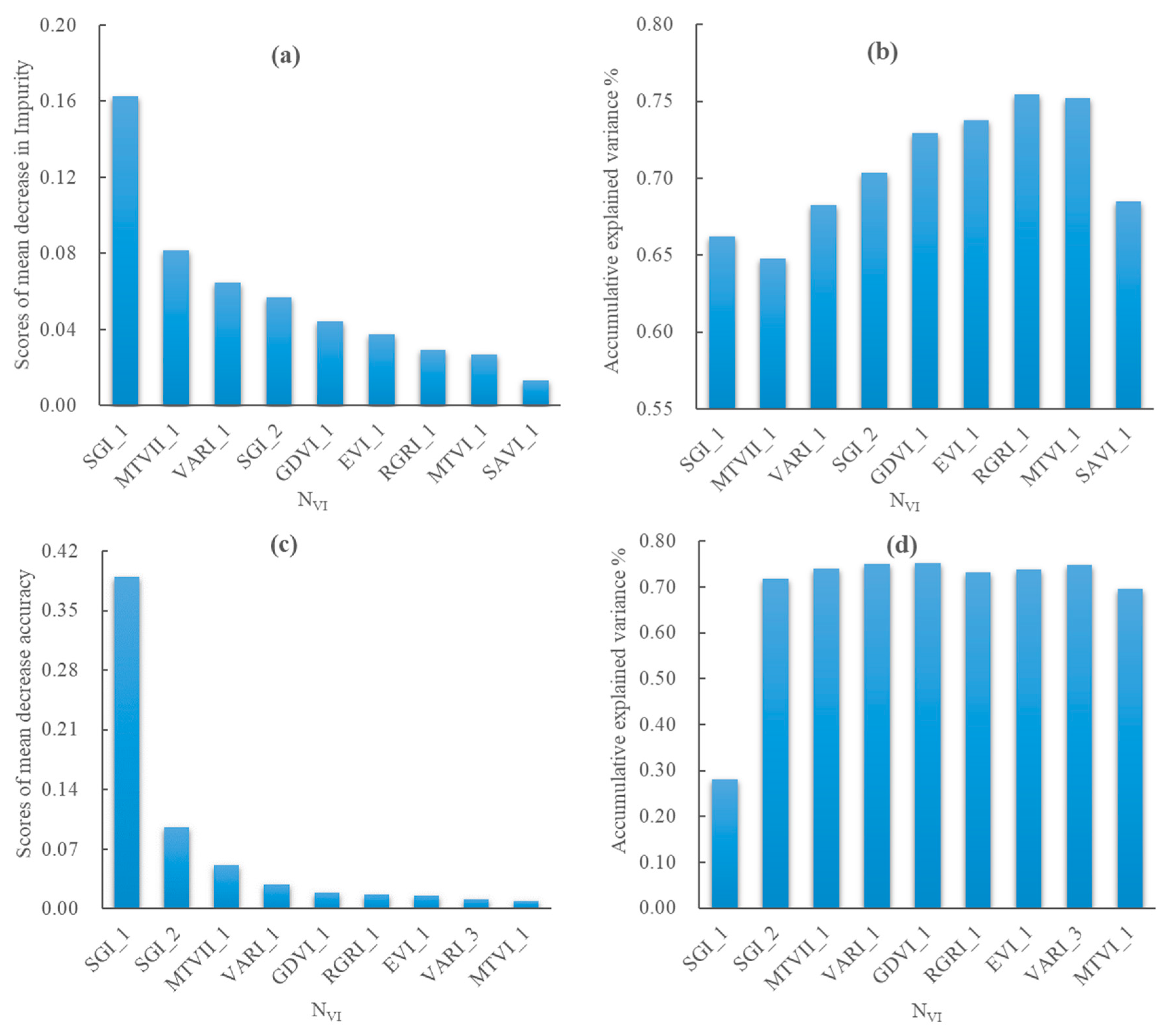
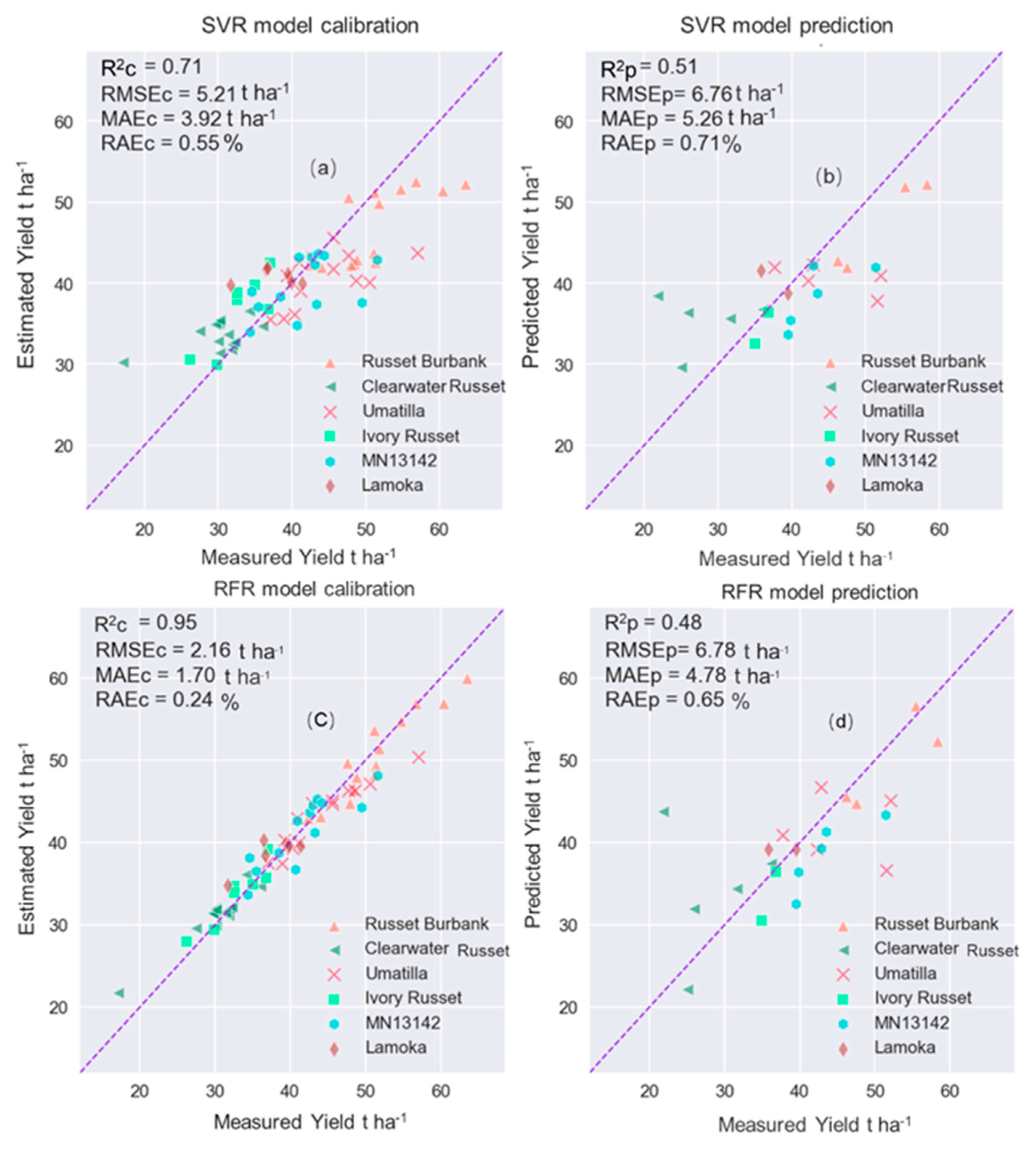
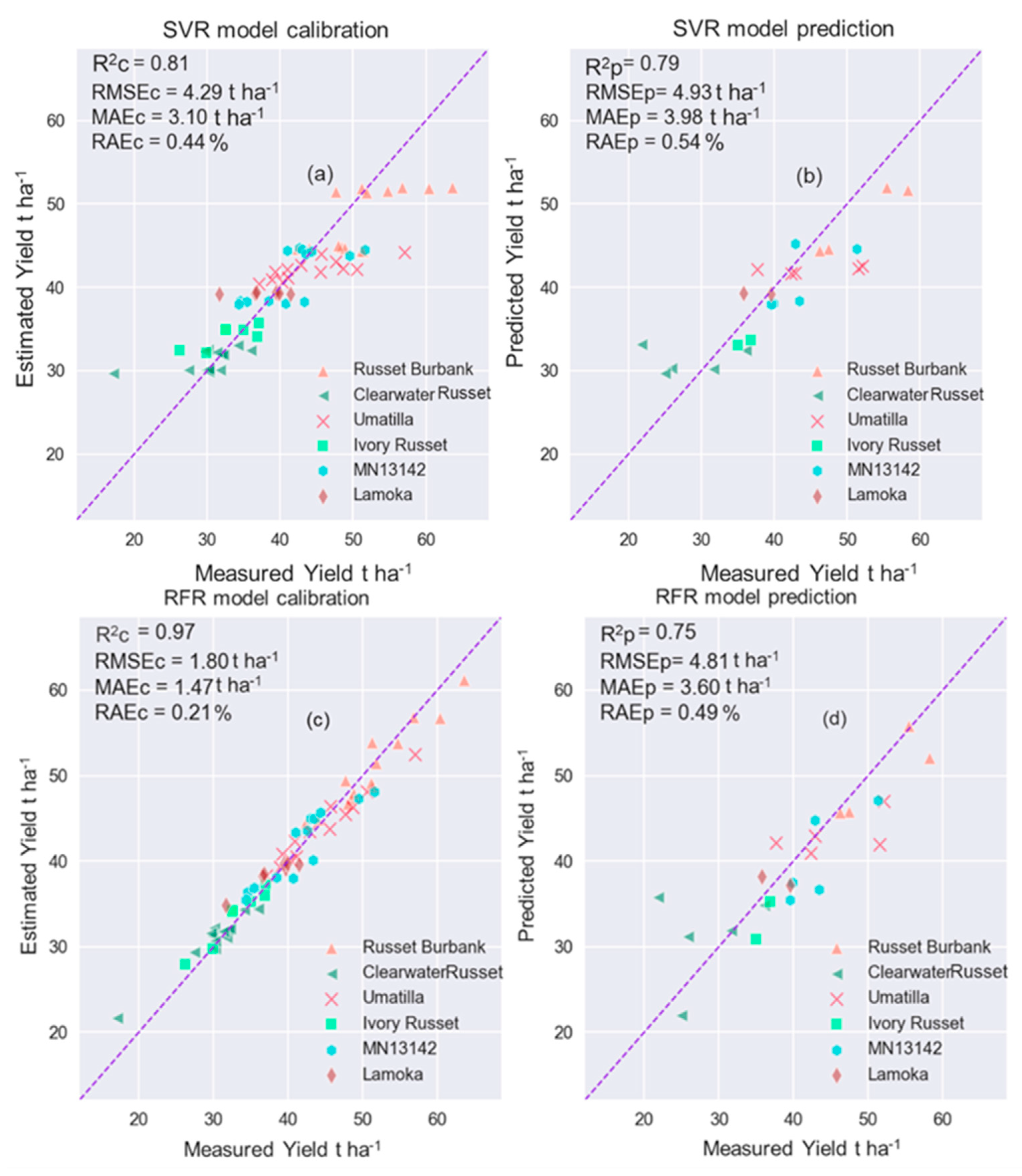
3.3. Machine Learning Models
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Haverkort, A.; Struik, P. Yield levels of potato crops: Recent achievements and future prospects. Field Crop. Res. 2015, 182, 76–85. [Google Scholar] [CrossRef]
- Batool, T.; Ali, S.; Seleiman, M.F.; Naveed, N.H.; Ali, A.; Ahmed, K.; Abid, M.; Rizwan, M.; Shahid, M.R.; Alotaibi, M.; et al. Plant growth promoting rhizobacteria alleviates drought stress in potato in response to suppressive oxidative stress and antioxidant enzymes activities. Sci. Rep. 2020, 10, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Ayyub, C.M.; Haidar, M.W.; Zulfiqar, F.; Abideen, Z.; Wright, S.R. Potato tuber yield and quality in response to different nitrogen fertilizer application rates under two split doses in an irrigated sandy loam soil. J. Plant Nutr. 2019, 42, 1850–1860. [Google Scholar] [CrossRef]
- Eid, M.A.M.; Abdel-Salam, A.A.; Salem, H.M.; Mahrous, S.E.; Seleiman, M.F.; Alsadon, A.A.; Solieman, T.H.I.; Ibrahim, A.A. Interaction Effects of Nitrogen Source and Irrigation Regime on Tuber Quality, Yield, and Water Use Efficiency of Solanum tuberosum L. Plants 2020, 9, 110. [Google Scholar] [CrossRef] [Green Version]
- Al-Gaadi, K.A.; Hassaballa, A.; Tola, E.; Kayad, A.; Madugundu, R.; Alblewi, B.; Assiri, F. Prediction of Potato Crop Yield Using Precision Agriculture Techniques. PLoS ONE 2016, 11, e0162219. [Google Scholar] [CrossRef]
- Gómez, D.; Salvador, P.; Sanz, J.; Casanova, J.L. Potato Yield Prediction Using Machine Learning Techniques and Sentinel 2 Data. Remote Sens. 2019, 11, 1745. [Google Scholar] [CrossRef] [Green Version]
- Davenport, J.; Redulla, C.; Hattendorf, M.; Evans, R.; Boydston, R. Potato Yield Monitoring on Commercial Fields. HortTechnology 2002, 12, 289–296. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Tian, S.; Lou, H.; Zhao, R. A reliable method for predicting bioethanol yield of different varieties of sweet potato by dry matter content. Grain Oil Sci. Technol. 2020, 3, 110–116. [Google Scholar] [CrossRef]
- Yang, W.; Nigon, T.; Hao, Z.; Paiao, G.D.; Fernández, F.G.; Mulla, D.; Yang, C. Estimation of corn yield based on hyperspectral imagery and convolutional neural network. Comput. Electron. Agric. 2021, 184, 106092. [Google Scholar] [CrossRef]
- Zaeen, A.A.; Sharma, L.; Jasim, A.; Bali, S.; Buzza, A.; Alyokhin, A. In-season potato yield prediction with active optical sensors. Age 2020, 3. [Google Scholar] [CrossRef] [Green Version]
- Gómez, D.; Salvador, P.; Sanz, J.; Casanova, J.L. New spectral indicator Potato Productivity Index based on Sentinel-2 data to improve potato yield prediction: A machine learning approach. Int. J. Remote. Sens. 2021, 42, 3426–3444. [Google Scholar] [CrossRef]
- Luo, S.; He, Y.; Li, Q.; Jiao, W.; Zhu, Y.; Zhao, X. Nondestructive estimation of potato yield using relative variables derived from multi-period LAI and hyperspectral data based on weighted growth stage. Plant Methods 2020, 16, 1–14. [Google Scholar] [CrossRef]
- Sivarajan, S. Estimating yield of irrigated potatoes using aerial and satellite. Ph.D. Thesis, Utah State University, Logan, UT, USA, 2011. [Google Scholar]
- Zhao, Y.; Chen, X.; Cui, Z.; Lobell, D.B. Using satellite remote sensing to understand maize yield gaps in the North China Plain. Field Crop. Res. 2015, 183, 31–42. [Google Scholar] [CrossRef]
- Salvador, P.; Gómez, D.; Sanz, J.; Casanova, J.L. Estimation of Potato Yield Using Satellite Data at a Municipal Level: A Machine Learning Approach. ISPRS Int. J. Geo-Inf. 2020, 9, 343. [Google Scholar] [CrossRef]
- Redulla, C.A.; Davenport, J.R.; Evans, R.G.; Hattendorf, M.J.; Alva, A.K.; Boydston, R.A. Relating potato yield and quality to field scale variability in soil characteristics. Am. J. Potato Res. 2002, 79, 317–323. [Google Scholar] [CrossRef]
- Rosen, C.J.; Bierman, P.M. Potato Yield and Tuber Set as Affected by Phosphorus Fertilization. Am. J. Potato Res. 2008, 85, 110–120. [Google Scholar] [CrossRef]
- Torabian, S.; Farhangi-Abriz, S.; Qin, R.; Noulas, C.; Sathuvalli, V.; Charlton, B.; Loka, D. Potassium: A Vital Macronutrient in Potato Production—A Review. Agronomy 2021, 11, 543. [Google Scholar] [CrossRef]
- Sun, C.; Feng, L.; Zhang, Z.; Ma, Y.; Crosby, T.; Naber, M.; Wang, Y. Prediction of End-Of-Season Tuber Yield and Tuber Set in Potatoes Using In-Season UAV-Based Hyperspectral Imagery and Machine Learning. Sensors 2020, 20, 5293. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, H.; Sun, X.; Fan, J.; Zhang, F.; Zheng, J.; Li, Y. Effects of farming practices on yield and crop water productivity of wheat, maize and potato in China: A meta-analysis. Agric. Water Manag. 2021, 243, 106444. [Google Scholar] [CrossRef]
- Eaton, T.E.; Azad, A.K.; Kabir, H.; Siddiq, A.B. Evaluation of Six Modern Varieties of Potatoes for Yield, Plant Growth Parameters and Resistance to Insects and Diseases. Agric. Sci. 2017, 8, 1315–1326. [Google Scholar] [CrossRef] [Green Version]
- Tessema, L.; Mohammed, W.; Abebe, T. Evaluation of Potato (Solanum tuberosum L.) Varieties for Yield and Some Agronomic Traits. Open Agric. 2020, 5, 63–74. [Google Scholar] [CrossRef] [Green Version]
- de Oliveira, J.S.; Brown, H.E.; Gash, A.; Moot, D.J. Yield and weight distribution of two potato cultivars grown from seed potatoes of different physiological ages. N. Zealand J. Crop. Hortic. Sci. 2016, 45, 91–118. [Google Scholar] [CrossRef]
- Sharma, L.K.; Bali, S.K.; Dwyer, J.D.; Plant, A.B.; Bhowmik, A. A Case Study of Improving Yield Prediction and Sulfur Deficiency Detection Using Optical Sensors and Relationship of Historical Potato Yield with Weather Data in Maine. Sensors 2017, 17, 1095. [Google Scholar] [CrossRef] [Green Version]
- Dahal, K.; Li, X.-Q.; Tai, H.; Creelman, A.; Bizimungu, B. Improving Potato Stress Tolerance and Tuber Yield Under a Climate Change Scenario—A Current Overview. Front. Plant Sci. 2019, 10, 563. [Google Scholar] [CrossRef]
- Wagg, C.; Hann, S.; Kupriyanovich, Y.; Li, S. Timing of short period water stress determines potato plant growth, yield and tuber quality. Agric. Water Manag. 2021, 247, 106731. [Google Scholar] [CrossRef]
- Li, B.; Xu, X.; Zhang, L.; Han, J.; Bian, C.; Li, G.; Liu, J.; Jin, L. Above-ground biomass estimation and yield prediction in potato by using UAV-based RGB and hyperspectral imaging. ISPRS J. Photogramm. Remote Sens. 2020, 162, 161–172. [Google Scholar] [CrossRef]
- Van Klompenburg, T.; Kassahun, A.; Catal, C. Crop yield prediction using machine learning: A systematic literature review. Comput. Electron. Agric. 2020, 177, 105709. [Google Scholar] [CrossRef]
- Wang, X.; Miao, Y.; Dong, R.; Zha, H.; Xia, T.; Chen, Z.; Kusnierek, K.; Mi, G.; Sun, H.; Li, M. Machine learning-based in-season nitrogen status diagnosis and side-dress nitrogen recommendation for corn. Eur. J. Agron. 2021, 123, 126193. [Google Scholar] [CrossRef]
- Li, S.; Yuan, F.; Ata-Ui-Karim, S.T.; Zheng, H.; Cheng, T.; Liu, X.; Tian, Y.; Zhu, Y.; Cao, W.; Cao, Q. Combining Color Indices and Textures of UAV-Based Digital Imagery for Rice LAI Estimation. Remote Sens. 2019, 11, 1763. [Google Scholar] [CrossRef] [Green Version]
- Zheng, H.; Cheng, T.; Zhou, M.; Li, D.; Yao, X.; Tian, Y.; Cao, W.; Zhu, Y. Improved estimation of rice aboveground biomass combining textural and spectral analysis of UAV imagery. Precis. Agric. 2019, 20, 611–629. [Google Scholar] [CrossRef]
- Zha, H.; Miao, Y.; Wang, T.; Li, Y.; Zhang, J.; Sun, W.; Feng, Z.; Kusnierek, K. Improving Unmanned Aerial Vehicle Remote Sensing-Based Rice Nitrogen Nutrition Index Prediction with Machine Learning. Remote Sens. 2020, 12, 215. [Google Scholar] [CrossRef] [Green Version]
- Worthington, C.M.; Hutchinson, C.M. Accumulated growing degree days as a model to determine key developmental stages and evaluate yield and quality of potato in Northeast Florida. Proc. Fla. State Hortic. Soc. 2005, 118, 98–101. [Google Scholar]
- Zaeen, A.A.; Sharma, L.K.; Jasim, A.; Bali, S.; Buzza, A.; Alyokhin, A. Yield and quality of three potato cultivars under series of nitrogen rates. Agrosyst. Geosci. Environ. 2020, 3. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Sripada, R.P.; Heiniger, R.W.; White, J.G.; Meijer, A.D. Aerial color infrared photography for determining early in-season nitrogen requirements in corn. Agron. J. 2006, 98, 968–977. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.; Strachan, I. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Gamon, J.; Surfus, J.S. Assessing leaf pigment content and activity with a reflectometer. New Phytol. 1999, 143, 105–117. [Google Scholar] [CrossRef]
- Roujean, J.-L.; Breon, F.-M. Estimating PAR absorbed by vegetation from bidirectional reflectance measurements. Remote Sens. Environ. 1995, 51, 375–384. [Google Scholar] [CrossRef]
- Birth, G.S.; McVey, G.R. Measuring the Color of Growing Turf with a Reflectance Spectrophotometer 1. Agron. J. 1968, 60, 640–643. [Google Scholar] [CrossRef]
- Huete, A. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Lobell, D.B.; Asner, G.P. Hyperion studies of crop stress in Mexico. In Proceedings of the 12th Annual JPL Airborne Earth Science Workshop, Pasadena, CA, USA, 24–28 February 2003. [Google Scholar]
- Bannari, A.; Asalhi, H.; Teillet, P. Transformed difference vegetation index (TDVI) for vegetation cover mapping. In Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 3055, pp. 3053–3055. [Google Scholar]
- Gitelson, A.A.; Stark, R.; Grits, U.; Rundquist, D.; Kaufman, Y.; Derry, D. Vegetation and soil lines in visible spectral space: A concept and technique for remote estimation of vegetation fraction. Int. J. Remote. Sens. 2002, 23, 2537–2562. [Google Scholar] [CrossRef]
- Rouse, J.; Hass, R.; Schell, J.; Deering, D. Monitoring vegetation systems in the great plains with ERTS. In Proceedings of the Third ERTS Symposium, Washington, DC, USA, 10–14 December 1973; pp. 309–317. [Google Scholar]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees. Belmont, CA: Wadsworth. Int. Group 1984, 432, 151–166. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 28. [Google Scholar]
- Sheykhmousa, M.; Mahdianpari, M.; Ghanbari, H.; Mohammadimanesh, F.; Ghamisi, P.; Homayouni, S. Support Vector Machine Versus Random Forest for Remote Sensing Image Classification: A Meta-Analysis and Systematic Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2020, 13, 6308–6325. [Google Scholar] [CrossRef]
- Awad, M.M. Toward Precision in Crop Yield Estimation Using Remote Sensing and Optimization Techniques. Agriculture 2019, 9, 54. [Google Scholar] [CrossRef] [Green Version]
- Kleinwechter, U.; Gastelo, M.; Ritchie, J.; Nelson, G.; Asseng, S. Simulating cultivar variations in potato yields for contrasting environments. Agric. Syst. 2016, 145, 51–63. [Google Scholar] [CrossRef]
- Maltas, A.; Dupuis, B.; Sinaj, S. Yield and Quality Response of Two Potato Cultivars to Nitrogen Fertilization. Potato Res. 2018, 61, 97–114. [Google Scholar] [CrossRef]
- Ramírez, D.; Yactayo, W.; Gutierrez, R.; Mares, V.; De Mendiburu, F.; Posadas, A.; Quiroz, R. Chlorophyll concentration in leaves is an indicator of potato tuber yield in water-shortage conditions. Sci. Hortic. 2014, 168, 202–209. [Google Scholar] [CrossRef]
- Sun, N.; Wang, Y.; Gupta, S.K.; Rosen, C.J. Nitrogen Fertility and Cultivar Effects on Potato Agronomic Properties and Acrylamide-forming Potential. Agron. J. 2019, 111, 408–418. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W.; Kooistra, L. Mapping canopy chlorophyll content of potatoes by Sentinel-2 as simulated with RapidEye images. In Proceedings of the Sentinel-2 for Science Workshop, Frascati, Italy, 20 May 2014; p. 7. [Google Scholar]
- Jurečka, F.; Lukas, V.; Hlavinka, P.; Semerádová, D.; Žalud, Z.; Trnka, M. Estimating Crop Yields at the Field Level Using Landsat and MODIS Products. Acta Univ. Agric. Silvic. Mendel. Brun. 2018, 66, 1141–1150. [Google Scholar] [CrossRef] [Green Version]
- Panda, S.S.; Ames, D.P.; Panigrahi, S. Application of Vegetation Indices for Agricultural Crop Yield Prediction Using Neural Network Techniques. Remote Sens. 2010, 2, 673–696. [Google Scholar] [CrossRef] [Green Version]
- García-Martínez, H.; Flores-Magdaleno, H.; Ascencio-Hernández, R.; Khalil-Gardezi, A.; Tijerina-Chávez, L.; Mancilla-Villa, O.; Vázquez-Peña, M. Corn Grain Yield Estimation from Vegetation Indices, Canopy Cover, Plant Density, and a Neural Network Using Multispectral and RGB Images Acquired with Unmanned Aerial Vehicles. Agriculture 2020, 10, 277. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensing Date | Days after Planting | GDDs to Sensing Date | Cultivar | Abbreviation | Planting Date | Harvesting Date |
|---|---|---|---|---|---|---|
| 2018 | ||||||
| 26 June 2018 | 44 | 469 | Clearwater Russet Russet Burbank Umatilla Russet Ivory Russet | CW RB UM IR | 14 May 2018 | 25 September 2018 |
| 10 July 2018 | 58 | 622 | ||||
| 18 July 2018 | 66 | 766 | ||||
| 2 August 2018 | 81 | 919 | ||||
| 2019 | ||||||
| 26 June 2019 | 52 | 302 | Clearwater Russet Russet Burbank Umatilla Russet Lamoka MN12142 | CW RB UM LA MN | 6 May 2019 | 27 September 2019 |
| 23 July 2019 | 79 | 475 | ||||
| 6 August 2019 | 92 | 593 | ||||
| 19 August 2018 | 106 | 752 | ||||
| Vegetation Index | Abbreviation | Formula | Reference |
|---|---|---|---|
| Difference Vegetation Index | DVI | [35] | |
| Enhanced Vegetation Index | EVI | [36] | |
| Green Atmospherically Resistant Index | GARI | [37] | |
| Green Difference Vegetation Index | GDVI | [38] | |
| Modified Triangular Vegetation Index | MTVI | [36] | |
| Modified Triangular Vegetation Index-Improved | MTVII | [39] | |
| Optimized Soil Adjusted Vegetation Index | OSAVI | [40] | |
| Red Green Ratio Index | RGRI | [41] | |
| Renormalized Difference Vegetation Index | RDVI | [42] | |
| Simple Ratio | SR | [43] | |
| Soil Adjusted Vegetation Index | SAVI | [44] | |
| Sum Green Index | SGI | [45] | |
| Transformed Difference Vegetation Index | TDVI | [46] | |
| Visible Atmospherically Resistant Index | VARI | [47] | |
| Green Normalized Difference Vegetation Index | GNDVI | [37] | |
| Normalized Difference Vegetation Index | NDVI | [48] |
| Cultivar | VI | Equation | R2 | RMSE (t ha−1) |
|---|---|---|---|---|
| 26 June 2018 | ||||
| Across | VARI | y = −900.34x2 + 567.93x − 7.95 | 0.71 | 6.48 |
| CW | SGI | y = −335891.19x2 + 47518.15x − 1650.71 | 0.52 | 3.15 |
| IR | VARI | y = −10022.70x2 + 2049.63x − 69.14 | 0.56 | 2.30 |
| RB | RGRI | y = −2762.77x2 + 4348.04x − 1651.24 | 0.31 | 3.85 |
| UR | GARI | y = −344.43x2 + 453.48x − 77.34 | 0.80 | 2.87 |
| 10 July 2018 | ||||
| Across | VARI | y = −23878x2 + 16263x − 2720.2 | 0.30 | 9.97 |
| CW | GARI | y = 1786.07x2 + 22122.07x − 601.38 | 0.09 | 4.17 |
| IR | SGI | y = −56579.29x2 + 11496.50x − 547.67 | 0.75 | 1.73 |
| RB | RGRI | y = 9735.48x2 − 11551.28x + 3474.325 | 0.34 | 3.75 |
| UR | GARI | y = −6688.93x2 + 8443.64x − 2612.62 | 0.78 | 3.03 |
| 18 July 2018 | ||||
| Across | / | / | / | / |
| CW | GNDVI | y = −1319.83x2 + 1584.31x − 445.35 | 0.26 | 3.76 |
| IR | SGI | y = −26227.30x2 + 2488.14x − 22.33 | 0.79 | 1.5 |
| RB | RGRI | y = 4735.16x2 − 7802.20x + 3259.107 | 0.60 | 2.92 |
| UR | GARI | y = 1388.37x2 − 1235.45x + 313.01 | 0.74 | 3.27 |
| 2 August 2018 | ||||
| Across | / | / | / | / |
| CW | TDVI | y = −3730.29x2 + 7957.54x − 4213.78 | 0.22 | 3.85 |
| IR | GDVI | y = −1545.97x2 + 1843.42x − 512.79 | 0.73 | 1.79 |
| RB | MTVI | y = −4172.66x2 + 2319.06x − 264.868 | 0.41 | 3.55 |
| UR | GARI | y = −0.43x2 + 97.41x − 0.085 | 0.77 | 3.08 |
| Cultivar | VI | Equation | R2 | RMSE (t ha−1) |
|---|---|---|---|---|
| 26 June 2019 | ||||
| Across | EVI | y = −1220.38x2 + 750.36x − 70.75 | 0.40 | 4.84 |
| CW | VARI | y = −11263.45x2 + 719.95x + 21.67 | 0.57 | 2.65 |
| LA | SGI | y = −40983.18x2 + 4455.11 − 75.02 | 0.30 | 2.33 |
| MN | / | / | / | / |
| RB | RGRI | y = −1398.99x2 + 2669.64x − 1222.89 | 0.35 | 2.85 |
| UR | RGRI | y = 4628.27x2 − 8586.01x + 4022.49 | 0.50 | 2.02 |
| 23 July 2019 | ||||
| Across | / | / | / | / |
| CW | / | / | / | / |
| LA | SGI | y = 126137.77x2 − 9151.45x + 201.97 | 0.22 | 2.47 |
| MN | / | / | / | / |
| RB | / | / | / | / |
| UR | SGI | y = 290331.87x2 − 22661.40x + 482.60 | 0.55 | 1.93 |
| 6 August 2019 | ||||
| Across | / | / | / | / |
| CW | / | / | / | / |
| LA | VARI | y = 741.65x2 − 218.60x + 49.338 | 0.51 | 1.96 |
| MN | / | / | / | / |
| RB | / | / | / | / |
| UR | SGI | y = 31294.42x2 − 3787.65x + 154.94 | 0.75 | 1.45 |
| 19 August 2019 | ||||
| Across | / | / | / | / |
| CW | / | / | / | / |
| LA | SGI | y = −23103.32x2 + 3446.58x − 88.404 | 0.59 | 1.80 |
| MN | / | / | / | / |
| RB | / | / | / | / |
| UR | SGI | y = 44215.48x2 − 6167.62x + 255.25 | 0.70 | 1.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Miao, Y.; Gupta, S.K.; Rosen, C.J.; Yuan, F.; Wang, C.; Wang, L.; Huang, Y. Improving Potato Yield Prediction by Combining Cultivar Information and UAV Remote Sensing Data Using Machine Learning. Remote Sens. 2021, 13, 3322. https://doi.org/10.3390/rs13163322
Li D, Miao Y, Gupta SK, Rosen CJ, Yuan F, Wang C, Wang L, Huang Y. Improving Potato Yield Prediction by Combining Cultivar Information and UAV Remote Sensing Data Using Machine Learning. Remote Sensing. 2021; 13(16):3322. https://doi.org/10.3390/rs13163322
Chicago/Turabian StyleLi, Dan, Yuxin Miao, Sanjay K. Gupta, Carl J. Rosen, Fei Yuan, Chongyang Wang, Li Wang, and Yanbo Huang. 2021. "Improving Potato Yield Prediction by Combining Cultivar Information and UAV Remote Sensing Data Using Machine Learning" Remote Sensing 13, no. 16: 3322. https://doi.org/10.3390/rs13163322
APA StyleLi, D., Miao, Y., Gupta, S. K., Rosen, C. J., Yuan, F., Wang, C., Wang, L., & Huang, Y. (2021). Improving Potato Yield Prediction by Combining Cultivar Information and UAV Remote Sensing Data Using Machine Learning. Remote Sensing, 13(16), 3322. https://doi.org/10.3390/rs13163322