
Data Processing and Analysis of Eight-Beam Wind Profile Coherent Wind Measurement Lidar

Abstract
:
1. Introduction
2. Materials and Methods
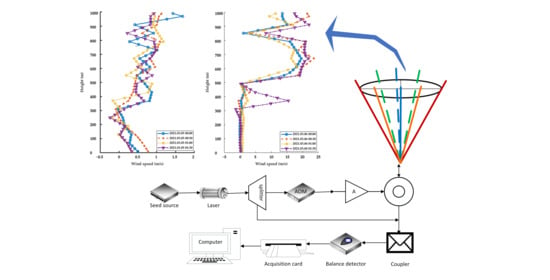
2.1. Coherent Wind Measurement Lidar System of Wind Profile
2.2. Scanning Mode
2.3. Sample Collection and Data Processing Scheme
2.4. Range Gate Division of the Sampling Echo Signal
2.5. Methods of Wind Field Retrieval
2.6. Calculation of the Wind Profile Lidar’s Carrier-to-Noise Ratio
3. Results and Discussion
3.1. Error Analysis of the Three-Dimensional Wind Field Measurements
3.2. Results of the Three-Dimensional Wind Field Measurements
3.3. Contrast Observations
3.4. Calculation of the Wind Profile Lidar’s Carrier-to-Noise Ratio
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shangguan, M.; Xia, H.; Wang, C.; Qiu, J.; Shentu, G.; Zhang, Q.; Dou, X.; Pan, J.W. All-fiber upconversion high spectral resolution wind lidar using a Fabry-Perot interferometer. Opt. Express 2016, 24, 19322–19336. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Jiang, S.; Sun, D.S.; Han, Y.L.; Han, F.; Zhou, A.R.; Zheng, J. Performance of Continuous-wave Coherent Doppler Lidar for Wind Measurement. Curr. Opt. Photonics 2019, 3, 466–472. [Google Scholar]
- Wagner, R.; Courtney, M.; Gottschall, J.; Lindelow-Marsden, P. Accounting for the speed shear in wind turbine power performance measurement. Wind. Energy 2011, 14, 993–1004. [Google Scholar] [CrossRef] [Green Version]
- Bohme, G.S.; Fadigas, E.A.; Martinez, J.R.; Tassinari, C.E.M. Analysis of the Use of Remote Sensing Measurements for Developing Wind Power Projects. J. Sol. Energy Eng. 2019, 141, 041005. [Google Scholar] [CrossRef]
- Targ, R.; Kavaya, M.J.; Huffaker, R.M.; Bowles, R.L. Coherent lidar airborne windshear sensor: Performance evaluation. Appl. Opt. 1991, 30, 2013–2026. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.W.; Wu, S.H.; Wang, Q.C.; Liu, B.Y.; Yin, B.; Zhai, X.C. Airport low-level wind shear lidar observation at Beijing Capital International Airport. Infrared Phys. Technol. 2019, 96, 113–122. [Google Scholar] [CrossRef] [Green Version]
- Xia, H.Y.; Shentu, G.L.; Shangguan, M.J.; Xia, X.X.; Jia, X.D.; Wang, C.; Zhang, J.; Pelc, J.S.; Fejer, M.M.; Zhang, Q.; et al. Long-range micro-pulse aerosol lidar at 1.5 mu m with an upconversion single-photon detector. Opt. Lett. 2015, 40, 1579–1582. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Cai, Y.J.; Wang, J.J.; Zhao, Y.F. Concentration monitoring of volatile organic compounds and ozone in Xi’an based on PTR-TOF-MS and differential absorption lidar. Atmos. Environ. 2021, 245, 12. [Google Scholar] [CrossRef]
- Xu, Q.; Nai, K.; Wei, L. Fitting VAD winds to aliased Doppler radial-velocity observations: A global minimization problem in the presence of multiple local minima. Q. J. R. Meteorol. Soc. 2010, 136, 451–461. [Google Scholar] [CrossRef]
- Frehlich, R.; Hannon, S.M.; Henderson, S.W. Coherent Doppler lidar measurements of wind field statistics. Bound.-Layer Meteorol. 1998, 86, 233–256. [Google Scholar] [CrossRef]
- Smith, D.A.; Harris, M.; Coffey, A.S.; Mikkelsen, T.; Jorgensen, H.E.; Mann, J.; Danielian, G. Wind lidar evaluation at the Danish wind test site in Hovsore. Wind Energy 2006, 9, 87–93. [Google Scholar] [CrossRef]
- Kindler, D.; Oldroyd, A.; Macaskill, A.; Finch, D. An eight month test campaign of the Qinetiq ZephIR system: Preliminary results. Meteorol. Z. 2007, 16, 479–489. [Google Scholar] [CrossRef]
- Pefia, A.; Hasager, C.B.; Gryning, S.E.; Courtney, M.; Antoniou, I.; Mikkelsen, T. Offshore Wind Profiling Using Light Detection and Ranging Measurements. Wind Energy 2009, 12, 105–124. [Google Scholar]
- Grishin, A.I.; Matvienko, G.G.; Polyakov, S.N. All-fiber wind low-coherent Doppler meteorological lidar. Prikl. Fiz. 2011, 4, 121–125. [Google Scholar]
- Zhou, P.; Wang, X.L.; Ma, Y.X.; Han, K.; Liu, Z.J. Stable all-fiber dual-wavelength thulium-doped fiber laser and its coherent beam combination. Laser Phys. 2011, 21, 184–187. [Google Scholar] [CrossRef]
- Banakh, V.A.; Smalikho, I.N.; Falits, A.V. Estimation of the height of the turbulent mixing layer from data of Doppler lidar measurements using conical scanning by a probe beam. Atmos. Meas. Tech. 2021, 14, 1511–1524. [Google Scholar] [CrossRef]
- Li, S.W.; Tse, K.T.; Weerasuriya, A.U.; Chan, P.W. Estimation of turbulence intensities under strong wind conditions via turbulent kinetic energy dissipation rates. J. Wind. Eng. Ind. Aerodyn. 2014, 131, 1–11. [Google Scholar] [CrossRef]
- Smalikho, I.N.; Banakh, V.A. Measurements of wind turbulence parameters by a conically scanning coherent Doppler lidar in the atmospheric boundary layer. Atmos. Meas. Tech. 2017, 10, 4191–4208. [Google Scholar] [CrossRef] [Green Version]
- Yuan, J.L.; Xia, H.Y.; Wei, T.W.; Wang, L.; Yue, B.; Wu, Y.B. Identifying cloud, precipitation, windshear, and turbulence by deep analysis of the power spectrum of coherent Doppler wind lidar. Opt. Express 2020, 28, 37406–37418. [Google Scholar] [CrossRef]
- Kameyama, S.; Ando, T.; Asaka, K.; Hirano, Y.; Wadaka, S. Compact all-fiber pulsed coherent Doppler lidar system for wind sensing. Appl. Opt. 2007, 46, 1953–1962. [Google Scholar] [CrossRef]
- Liu, Z.L.; Barlow, J.F.; Chan, P.W.; Fung, J.C.H.; Li, Y.G.; Ren, C.; Mak, H.W.L.; Ng, E.A. A Review of Progress and Applications of Pulsed Doppler Wind LiDARs. Remote Sens. 2019, 11, 2522. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Gao, J.; Pan, J.; Wang, J.J.; Cai, Y.J.; Zhao, Y.F. Triple charge-coupled device cameras combined backscatter lidar for retrieving PM2.5 from aerosol extinction coefficient. Appl. Opt. 2020, 59, 10369–10379. [Google Scholar] [CrossRef] [PubMed]
- Dolfi-Bouteyre, A.; Canat, G.; Valla, M.; Augere, B.; Besson, C.; Goular, D.; Lombard, L.; Cariou, J.P.; Durecu, A.; Fleury, D.; et al. Pulsed 1.5-mu m LIDAR for Axial Aircraft Wake Vortex Detection Based on High-Brightness Large-Core Fiber Amplifier. Ieee J. Sel. Top. Quantum Electron. 2009, 15, 441–450. [Google Scholar] [CrossRef]
- Zhang, G.Z.; Li, J.; Wang, Y.; Liu, Z.S.; Chang, D.L.; Tian, J.H. Vehicle-mounted validations of a 1.55-mu m all-fiber continuous-wave coherent laser radar for measuring aircraft airspeed. Opt. Eng. 2019, 58, 9. [Google Scholar]
- Greco, S.; Emmitt, G.D.; DuVivier, A.; Hines, K.; Kavaya, M. Polar Winds: Airborne Doppler Wind Lidar Missions in the Arctic for Atmospheric Observations and Numerical Model Comparisons. Atmosphere 2020, 11, 1141. [Google Scholar] [CrossRef]
- Chouza, F.; Reitebuch, O.; Gross, S.; Rahm, S.; Freudenthaler, V.; Toledano, C.; Weinzierl, B. Retrieval of aerosol backscatter and extinction from airborne coherent Doppler wind lidar measurements. Atmos. Meas. Tech. 2015, 8, 2909–2926. [Google Scholar] [CrossRef] [Green Version]
- Banakh, V.A.; Smalikho, I.N.; Falits, A.V.; Gordeev, E.V.; Sukharev, A.A. Demonstration of the possibility of using a duo-beam method for wind profile estimation by pulsed coherent Doppler lidar. Russ. Phys. J. 2017, 60, 175–178. [Google Scholar]
- Prasad, N.S.; Mylapore, A.R. Three-beam aerosol backscatter correlation lidar for wind profiling. Opt. Eng. 2017, 56, 031222. [Google Scholar] [CrossRef]
- Sathe, A.; Mann, J.; Vasiljevic, N.; Lea, G.A. A six-beam method to measure turbulence statistics using ground-based wind lidars. Atmos. Meas. Tech. 2015, 8, 729–740. [Google Scholar] [CrossRef] [Green Version]
- Chumchean, S.; Sharma, A.; Seed, A. Radar rainfall error variance and its impact on radar rainfall calibration. Phys. Chem. Earth 2003, 28, 27–39. [Google Scholar] [CrossRef]
- Liu, H.T.; Wang, Z.Z.; Zhao, J.X.; Ma, J.J. Error Accumulation and Transfer Effects of the Retrieved Aerosol Backscattering Coefficient Caused by Lidar Ratios. Curr. Opt. Photonics 2018, 2, 119–124. [Google Scholar]
- Henderson, S.W.; Hale, C.P.; Magee, J.R.; Kavaya, M.J.; Huffaker, A.V. Eye-safe coherent laser radar system at 2.1 microm using Tm,Ho:YAG lasers. Opt. Lett. 1991, 16, 773–775. [Google Scholar] [CrossRef]
- Holleman, I. Quality control and verification of weather radar wind profiles. J. Atmos. Ocean. Technol. 2005, 22, 1541–1550. [Google Scholar] [CrossRef] [Green Version]
- Frehlich, R.; Kelley, N. Measurements of Wind and Turbulence Profiles With Scanning Doppler Lidar for Wind Energy Applications. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2008, 1, 42–47. [Google Scholar] [CrossRef]
- Kameyama, S.; Ando, T.; Asaka, K.; Hirano, Y.; Wadaka, S. Performance of Discrete-Fourier-Transform-Based Velocity Estimators for a Wind-Sensing Coherent Doppler Lidar System in the Kolmogorov Turbulence Regime. Ieee Trans. Geosci. Remote Sens. 2009, 47, 3560–3569. [Google Scholar] [CrossRef]
- Wu, S.H.; Liu, B.Y.; Liu, J.T.; Zhai, X.C.; Feng, C.Z.; Wang, G.N.; Zhang, H.W.; Yin, J.P.; Wang, X.T.; Li, R.Z. Wind turbine wake visualization and characteristics analysis by Doppler lidar. Opt. Express 2016, 24, A762–A780. [Google Scholar] [CrossRef]
- Shangguan, M.J.; Wang, C.; Xia, H.Y.; Shentu, G.L.; Dou, X.K.; Zhang, Q.; Pan, J.W. Brillouin optical time domain reflectometry for fast detection of dynamic strain incorporating double-edge technique. Opt. Commun. 2017, 398, 95–100. [Google Scholar] [CrossRef] [Green Version]
- Karlsson, C.J.; Olsson, F.A.A.; Letalick, D.; Harris, M. All-fiber multifunction continuous-wave coherent laser radar at 1.55 mu m for range, speed, vibration, and wind measurements. Appl. Opt. 2000, 39, 3716–3726. [Google Scholar] [CrossRef]
- Panne, U. Laser remote sensing. Trac-Trends Anal. Chem. 1998, 17, 491–500. [Google Scholar] [CrossRef]
- Liang, X.D. An integrating velocity-azimuth process single-Doppler radar wind retrieval method. J. Atmos. Ocean. Technol. 2007, 24, 658–665. [Google Scholar] [CrossRef]
- Teschke, G.; Lehmann, V. Mean wind vector estimation using the velocity-azimuth display (VAD) method: An explicit algebraic solution. Atmos. Meas. Tech. 2017, 10, 3265–3271. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Xia, H.Y.; Liu, Y.P.; Lin, S.F.; Dou, X.K. Spatial resolution enhancement of coherent Doppler wind lidar using joint time-frequency analysis. Opt. Commun. 2018, 424, 48–53. [Google Scholar] [CrossRef]
- Akhmetianov, V.R.; Mishina, O.A. Processing of Wind Coherent Doppler Lidar Data on the Base of Gaussian Approximation Method. Izvestiya vysshikh uchebnykh zavedenii. Priborostroenie 2010, 53, 20–26. [Google Scholar]
- Beyon, J.Y.; Koch, G.J. Novel nonlinear adaptive Doppler-shift estimation technique for the coherent Doppler validation lidar. Opt. Eng. 2007, 46, 10. [Google Scholar]
- Park, S.J.; Kim, S.W.; Park, M.S.; Song, C.K. Measurement of Planetary Boundary Layer Winds with Scanning Doppler Lidar. Remote Sens. 2018, 10, 1261. [Google Scholar] [CrossRef] [Green Version]
- Augere, B.; Valla, M.; Durécu, A.; Dolfi-Bouteyre, A.; Goular, D.; Gustave, F.; Planchat, C.; Fleury, D.; Huet, T.; Besson, C. Three-Dimensional Wind Measurements with the Fibered Airborne Coherent Doppler Wind Lidar LIVE. Atmosphere 2019, 10, 549. [Google Scholar] [CrossRef] [Green Version]
- Banakh, V.A.; Brewer, A.; Pichugina, E.I.; Smalikho, I.N. Wind velocity and direction measurement with a coherent Doppler lidar under conditions of weak echo signal. Atmos. Oceanic. Opt. 2010, 23, 333–340. [Google Scholar] [CrossRef]
- Wang, C.; Xia, H.Y.; Shangguan, M.J.; Wu, Y.B.; Wang, L.; Zhao, L.J.; Qiu, J.W.; Zhang, R.J. 1.5 mu m polarization coherent lidar incorporating time-division multiplexing. Opt. Express 2017, 25, 20663–20674. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Yuan, L.C.; Fan, C.H.; Liu, F.F.; Zhang, X.; Zhu, X.P.; Liu, J.Q.; Zhu, X.L.; Chen, W.B. Performance validation on an all-fiber 1.54-mu m pulsed coherent Doppler lidar for wind-profile measurement. Opt. Eng. 2020, 59, 11. [Google Scholar] [CrossRef] [Green Version]
- Schween, J.H.; Hirsikko, A.; Lohnert, U.; Crewell, S. Mixing-layer height retrieval with ceilometer and Doppler lidar: From case studies to long-term assessment. Atmos. Meas. Tech. 2014, 7, 3685–3704. [Google Scholar] [CrossRef] [Green Version]
- Hooper, D.A. Signal and noise level estimation for narrow spectral width returns observed by the Indian MST radar. Radio Sci. 1999, 34, 859–870. [Google Scholar] [CrossRef]
- Sinha, S.; Sarma, T.V.C.; Regeena, M.L. Estimation of Doppler Profile Using Multiparameter Cost Function Method. IEEE Trans. Geosci. Remote. Sens. 2017, 55, 932–942. [Google Scholar] [CrossRef]
- Harris, M.; Pearson, G.N.; Vaughan, J.M.; Letalick, D.; Karlsson, C. The role of laser coherence length in continuous-wave coherent laser radar. J. Mod. Opt. 1998, 45, 1567–1581. [Google Scholar] [CrossRef]
- Paeschke, E.; Leinweber, R.; Lehmann, V. An assessment of the performance of a 1.5 mu m Doppler lidar for operational vertical wind profiling based on a 1-year trial. Atmos. Meas. Tech. 2015, 8, 2251–2266. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Qualification | Specification |
|---|---|---|
| Transmitter | Operating wavelength | 1550 nm |
| Pulse energy | 145 μJ | |
| Pulse repetition | 10 KHz | |
| Pulse width | 200 ns | |
| Transceiver | Laser mode | Pulse |
| Scan mode | Conical | |
| Elevation angle | 60° | |
| Start angle | 0° | |
| Step angle | 45° | |
| Data-Acquisition | Sampling frequency | 1 GHz |
| Sampling points | 150 | |
| Range resolution | 30 m | |
| Blind range | 30 m | |
| Gate number | 128 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Zhang, X.; Zhang, Y.; Ding, J.; Wang, K.; Gao, Y.; Su, R.; Fang, J. Data Processing and Analysis of Eight-Beam Wind Profile Coherent Wind Measurement Lidar. Remote Sens. 2021, 13, 3549. https://doi.org/10.3390/rs13183549
Zhao Y, Zhang X, Zhang Y, Ding J, Wang K, Gao Y, Su R, Fang J. Data Processing and Analysis of Eight-Beam Wind Profile Coherent Wind Measurement Lidar. Remote Sensing. 2021; 13(18):3549. https://doi.org/10.3390/rs13183549
Chicago/Turabian StyleZhao, Yuefeng, Xiaojie Zhang, Yurong Zhang, Jinxin Ding, Kun Wang, Yuhou Gao, Runsong Su, and Jing Fang. 2021. "Data Processing and Analysis of Eight-Beam Wind Profile Coherent Wind Measurement Lidar" Remote Sensing 13, no. 18: 3549. https://doi.org/10.3390/rs13183549
APA StyleZhao, Y., Zhang, X., Zhang, Y., Ding, J., Wang, K., Gao, Y., Su, R., & Fang, J. (2021). Data Processing and Analysis of Eight-Beam Wind Profile Coherent Wind Measurement Lidar. Remote Sensing, 13(18), 3549. https://doi.org/10.3390/rs13183549