
Performance of Single-Epoch EWL/WL/NL Ambiguity-Fixed Precise Point Positioning with Regional Atmosphere Modelling





Abstract
:1. Introduction
2. Methods
2.1. Multi-Frequency Uncombined PPP Model
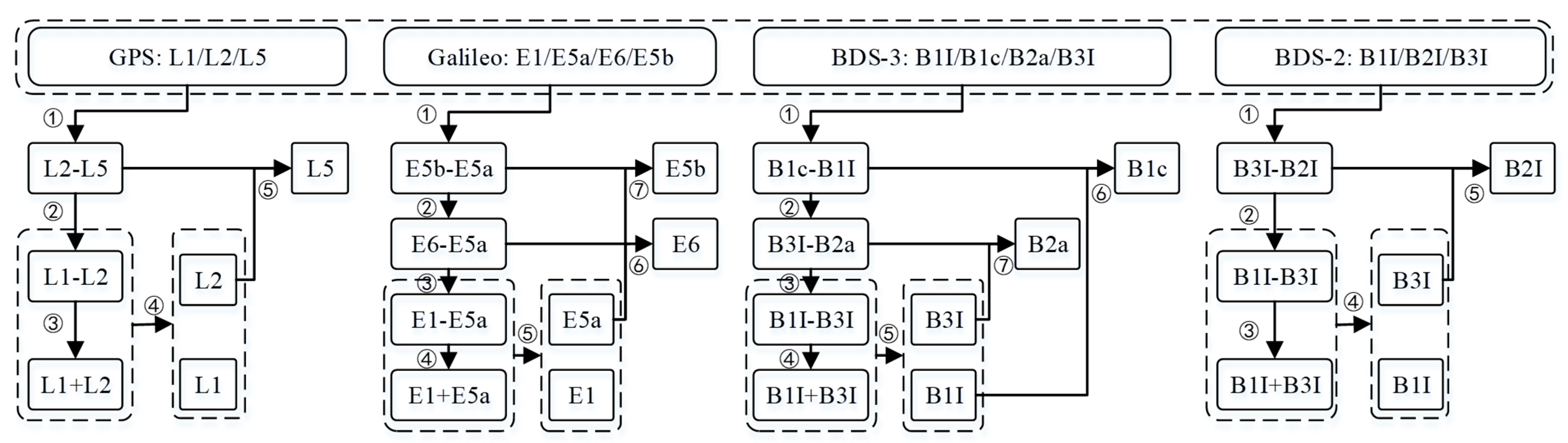
2.2. Multi-Frequency FCB Estimation
- The EWL/WL float ambiguity is formed by the linear transformation of raw ambiguity and then the EWL/WL FCB is extracted using the least-squares method;
- In view of the long wavelength of WL ambiguity, by correcting WL FCB, the WL float ambiguity can be fixed by integer rounding;
- Construct IF float ambiguity from raw ambiguity, further combine the fixed WL ambiguity in the second step to calculate NL float ambiguity, and finally extract the NL FCB by the iterative least-squares method; and
2.3. Multi-Frequency Stepwise Ambiguity Resolution
2.4. Regional Atmosphere Modelling
3. Results
3.1. Data Processing
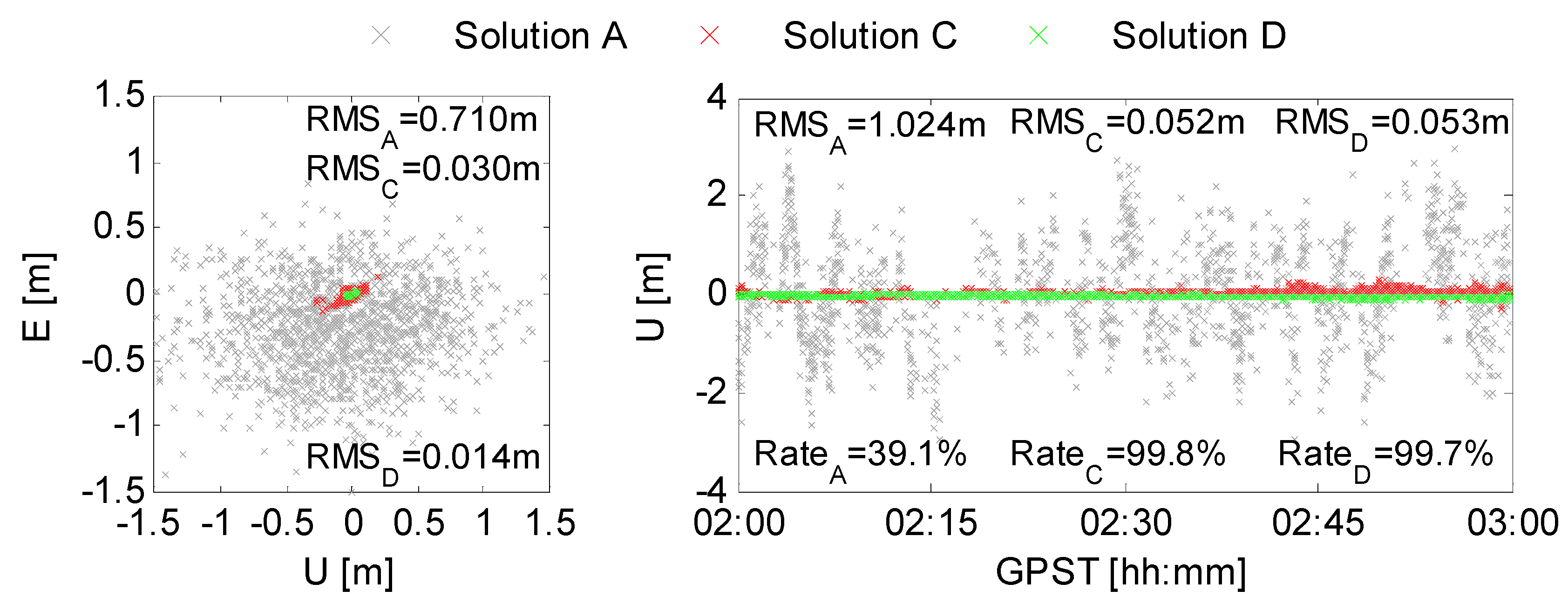
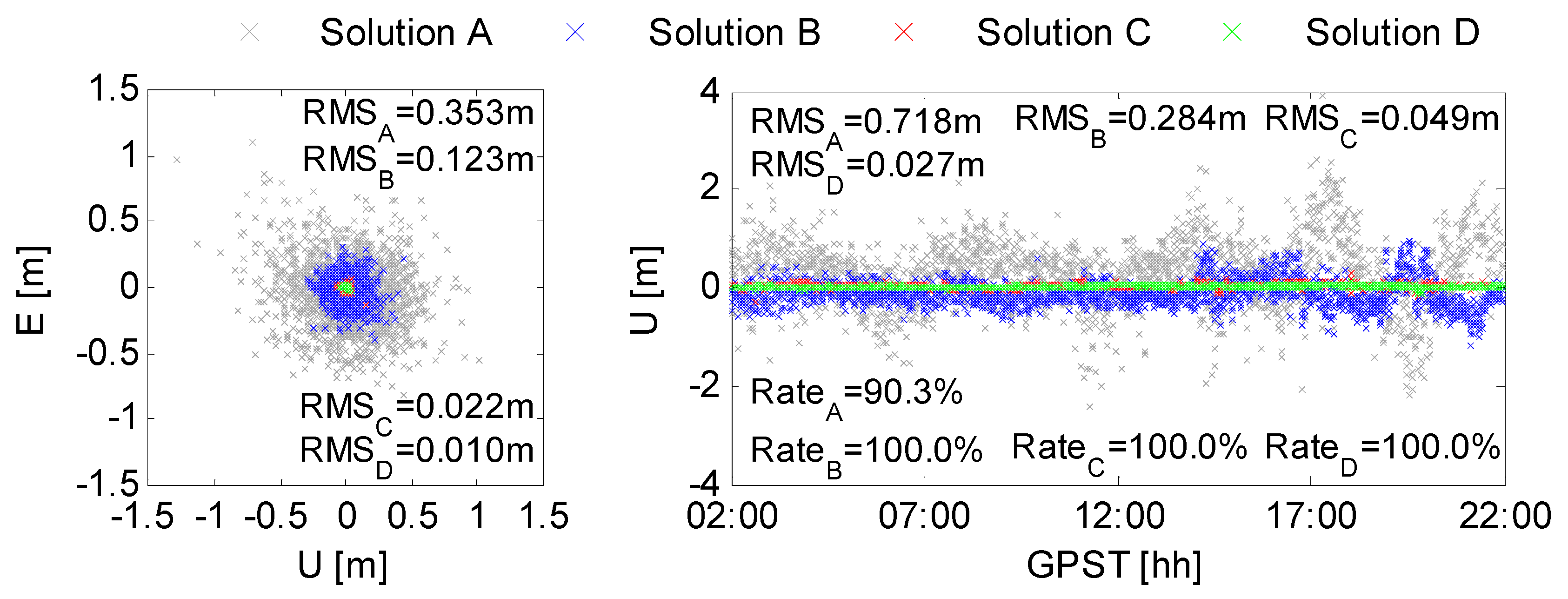
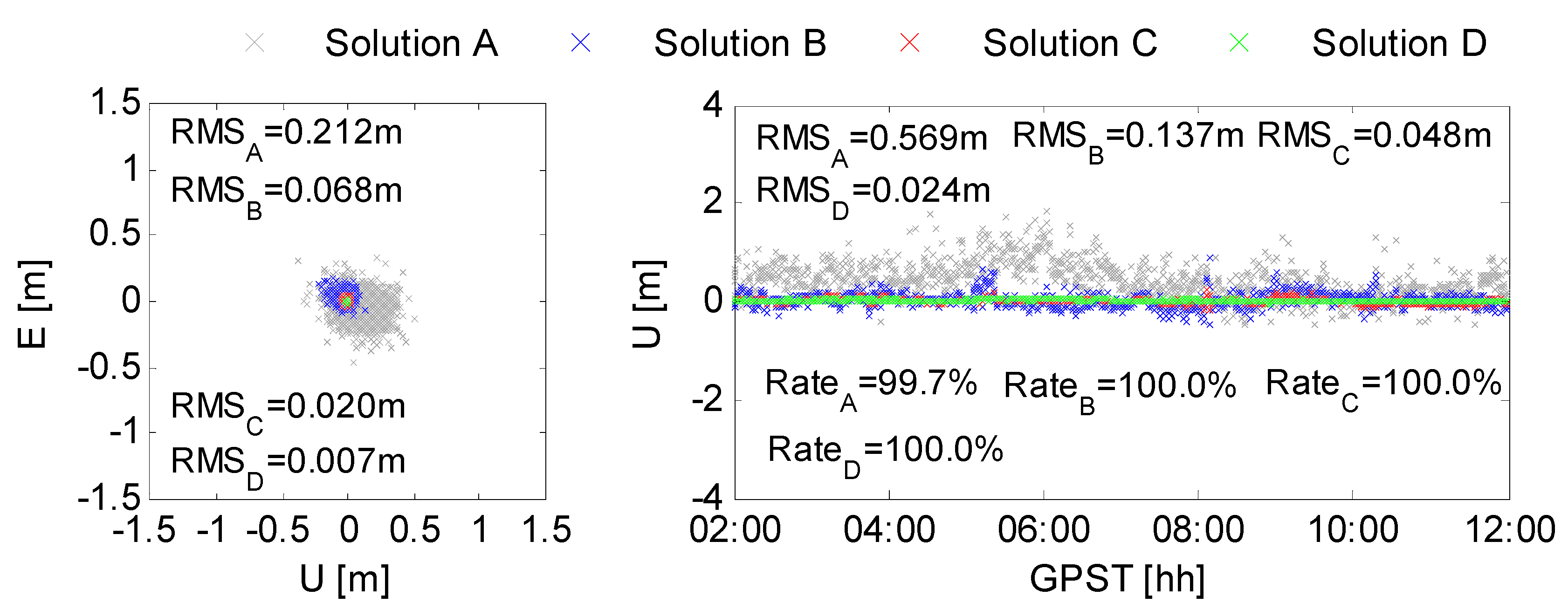
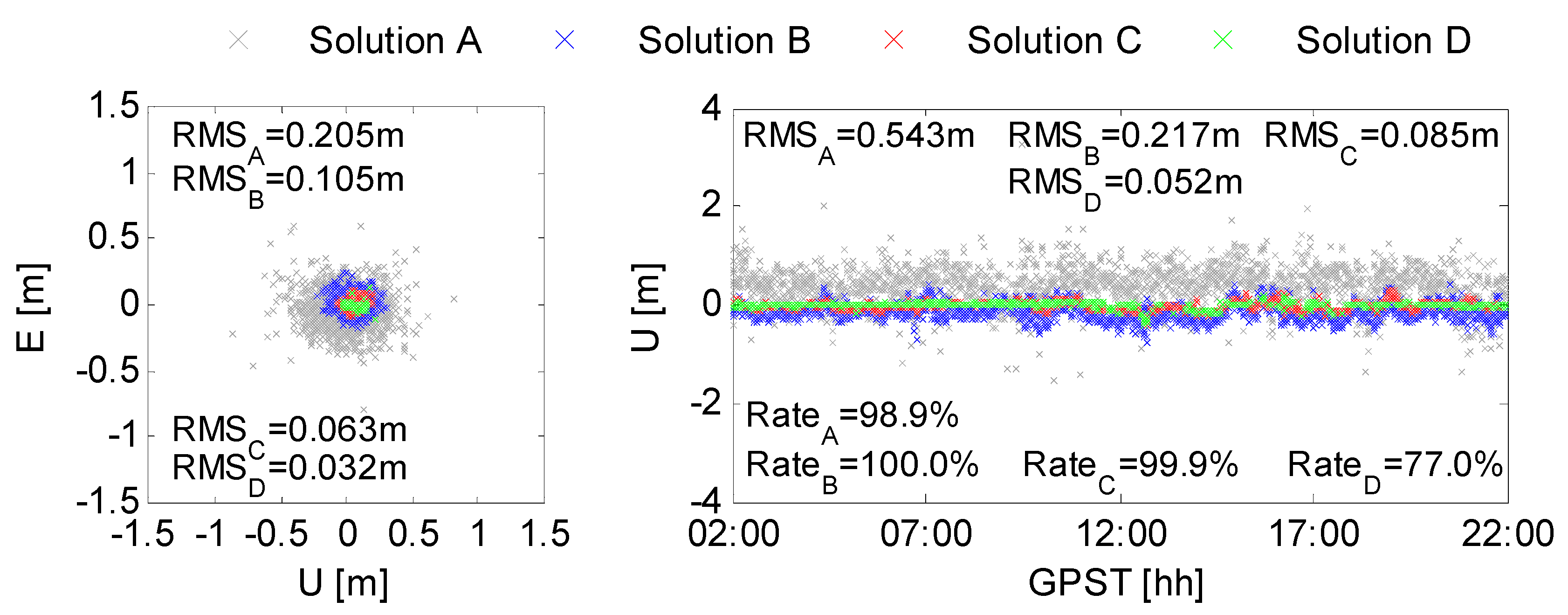
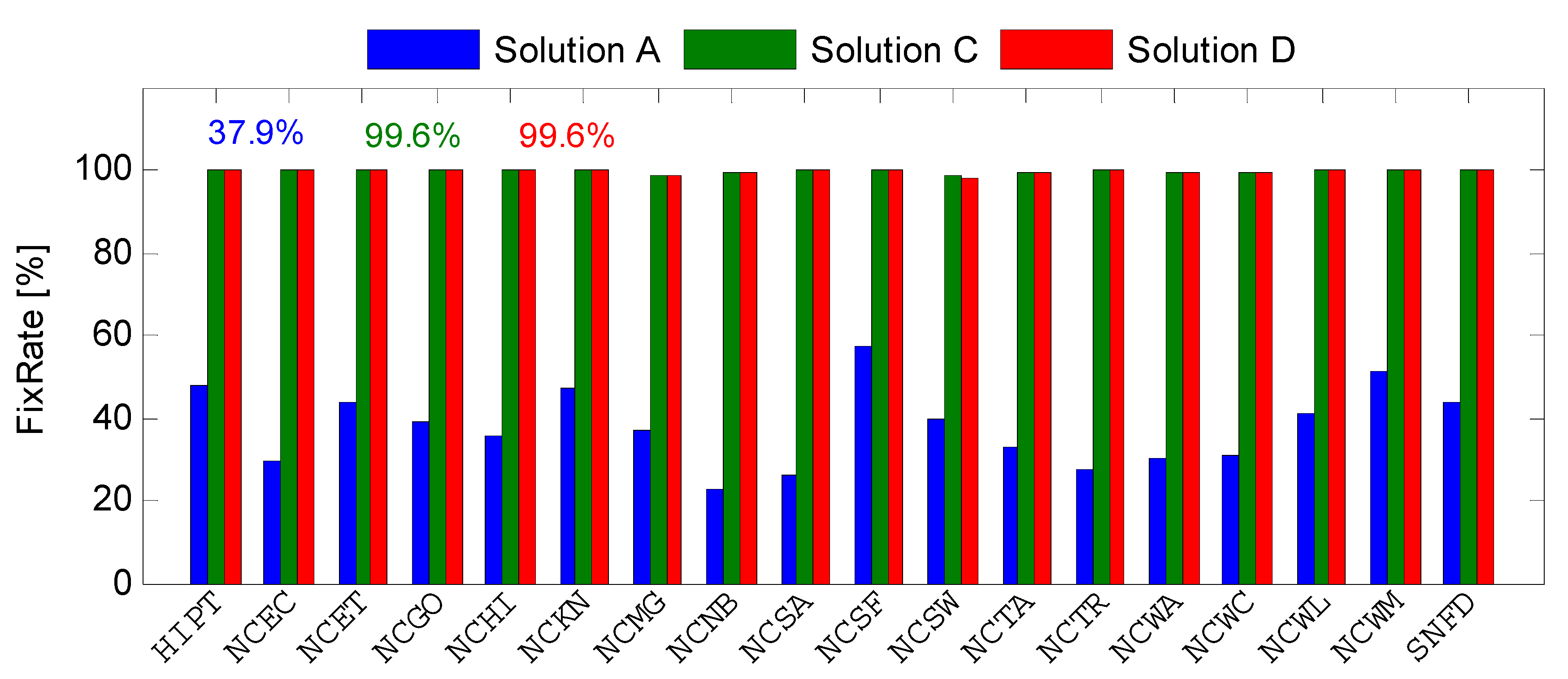
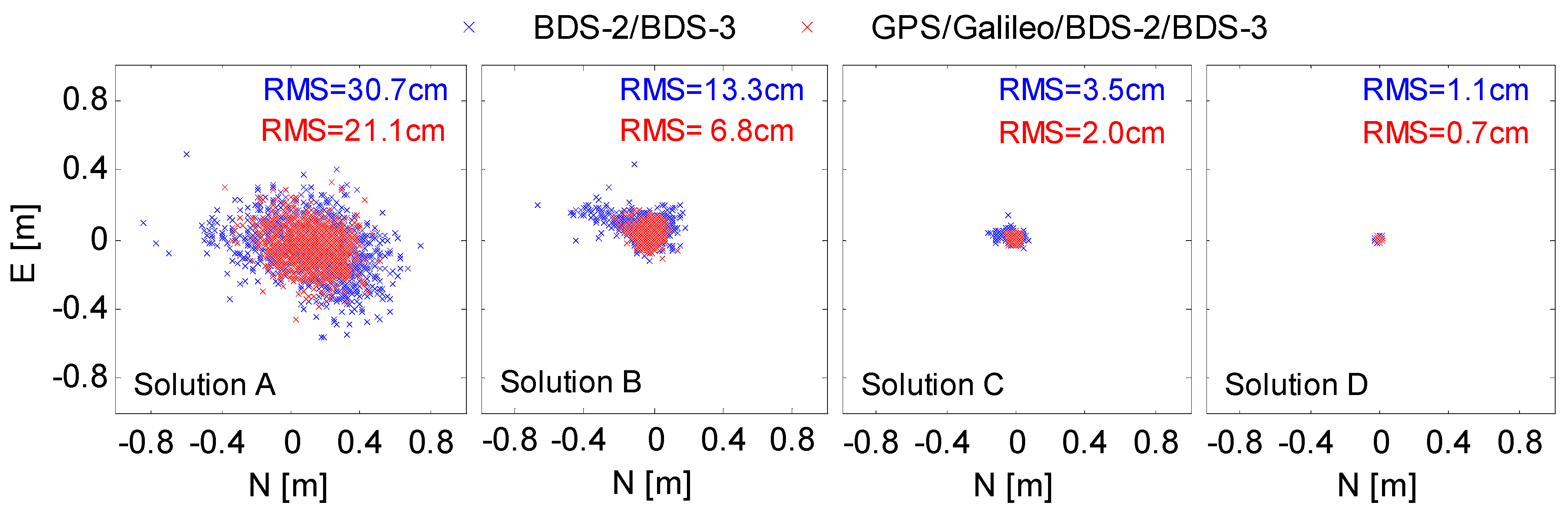
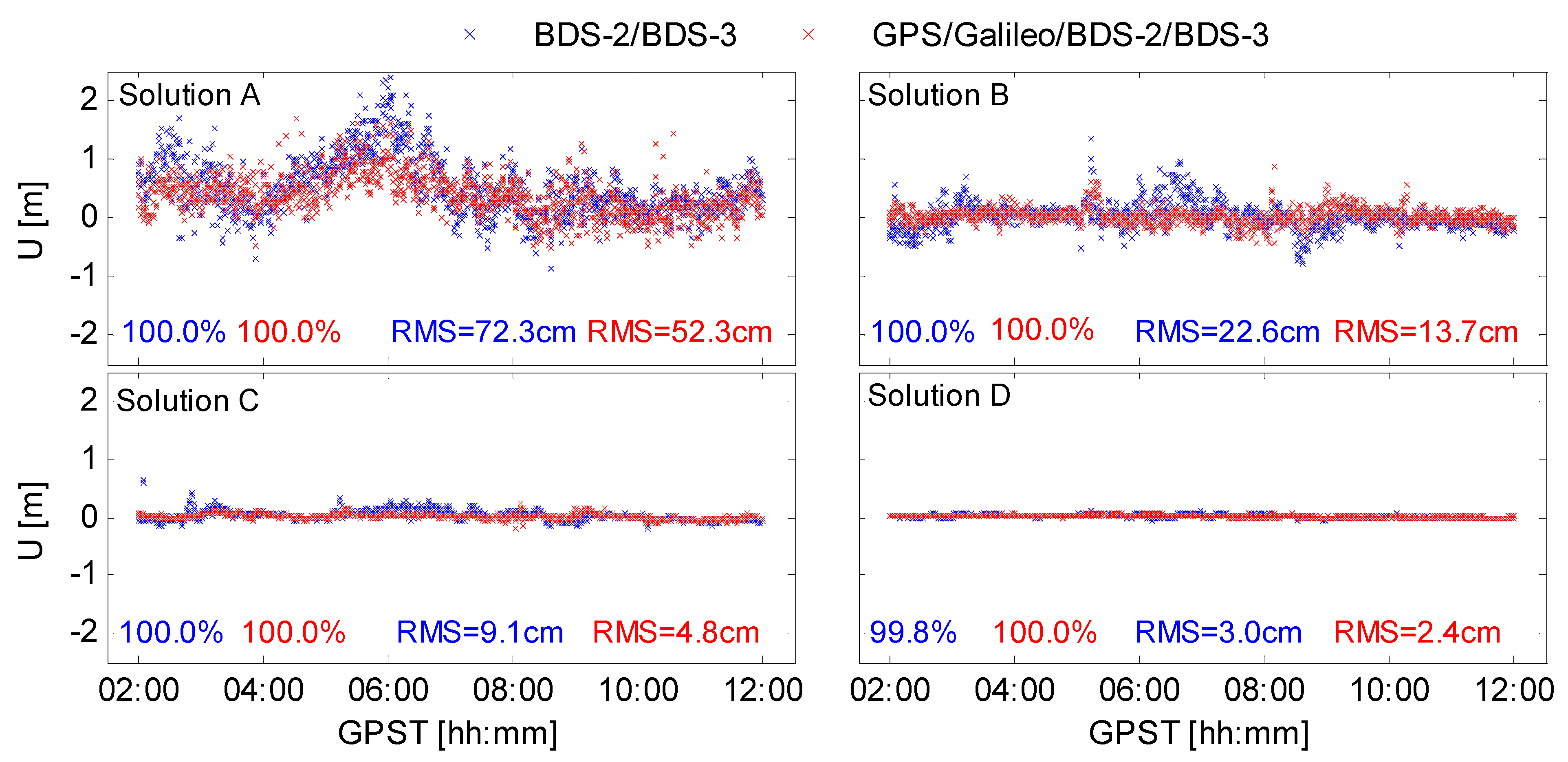
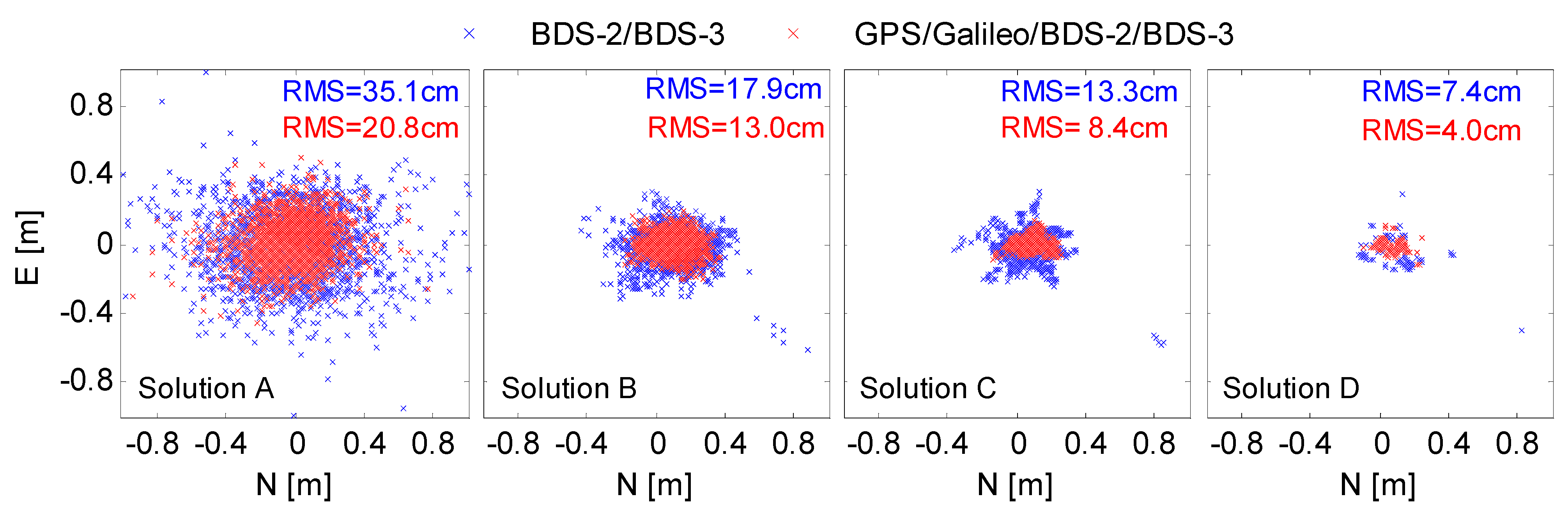
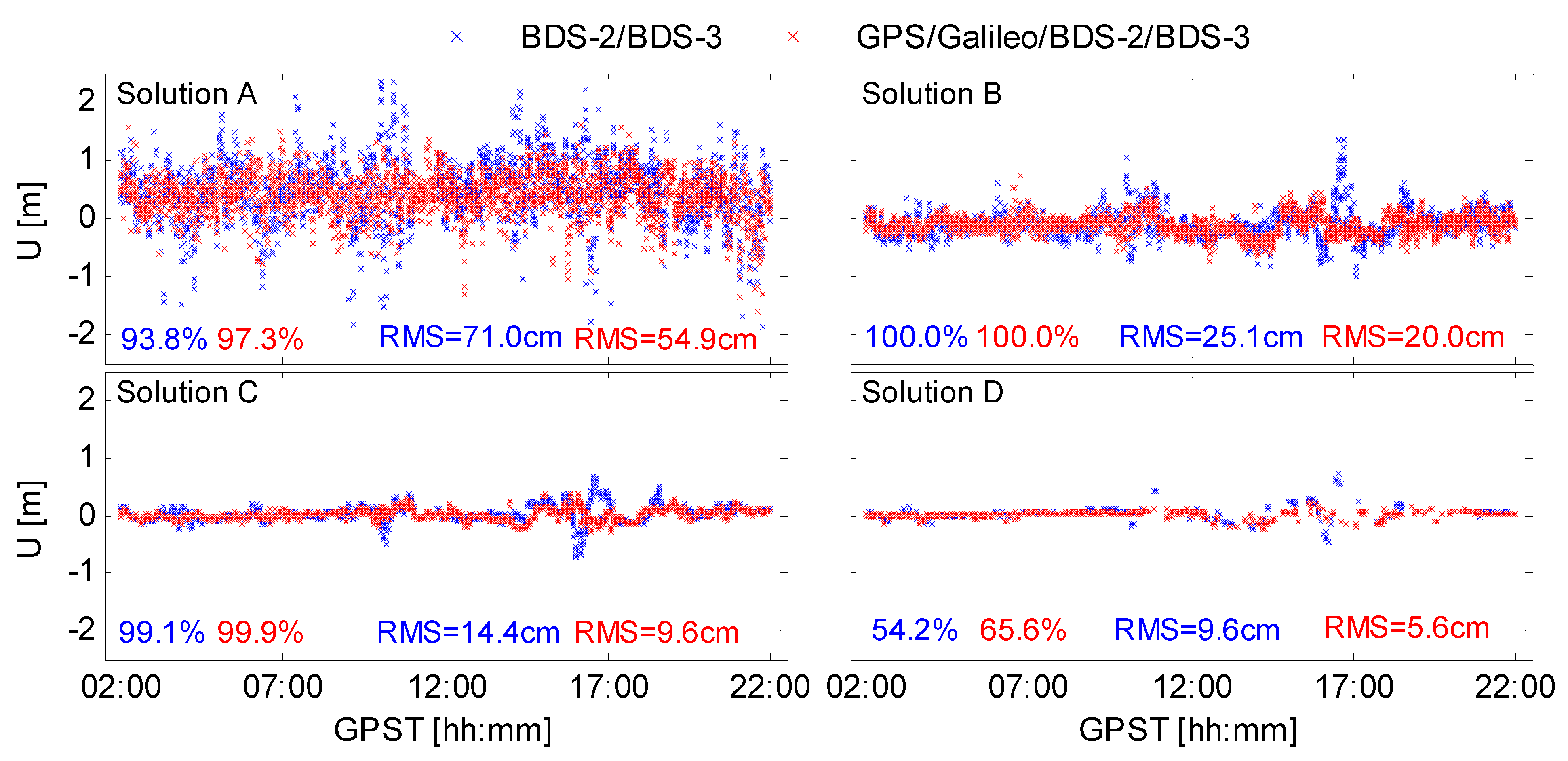
- Solution A: conventional single-epoch WL ambiguity-fixed solution without atmosphere modelling;
- Solution B: single-epoch EWL ambiguity-fixed solution with atmosphere modelling;
- Solution C: single-epoch WL ambiguity-fixed solution with atmosphere modelling; and
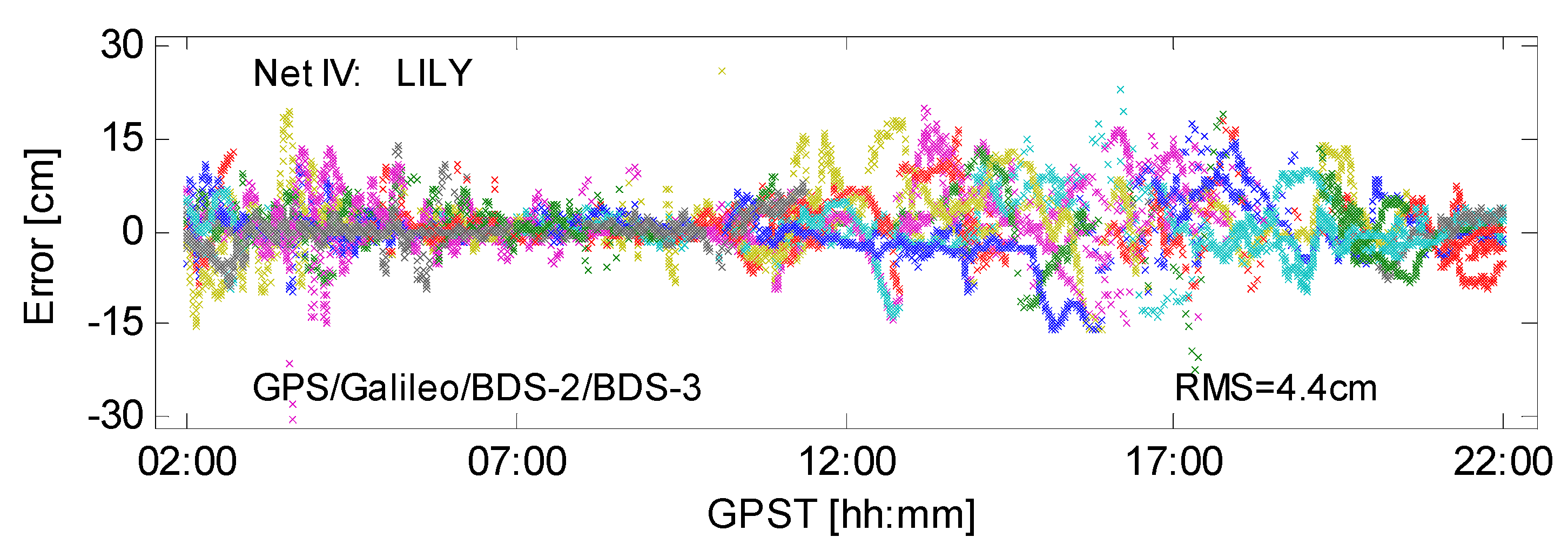
- Solution D: single-epoch NL ambiguity-fixed solution with atmosphere modelling.
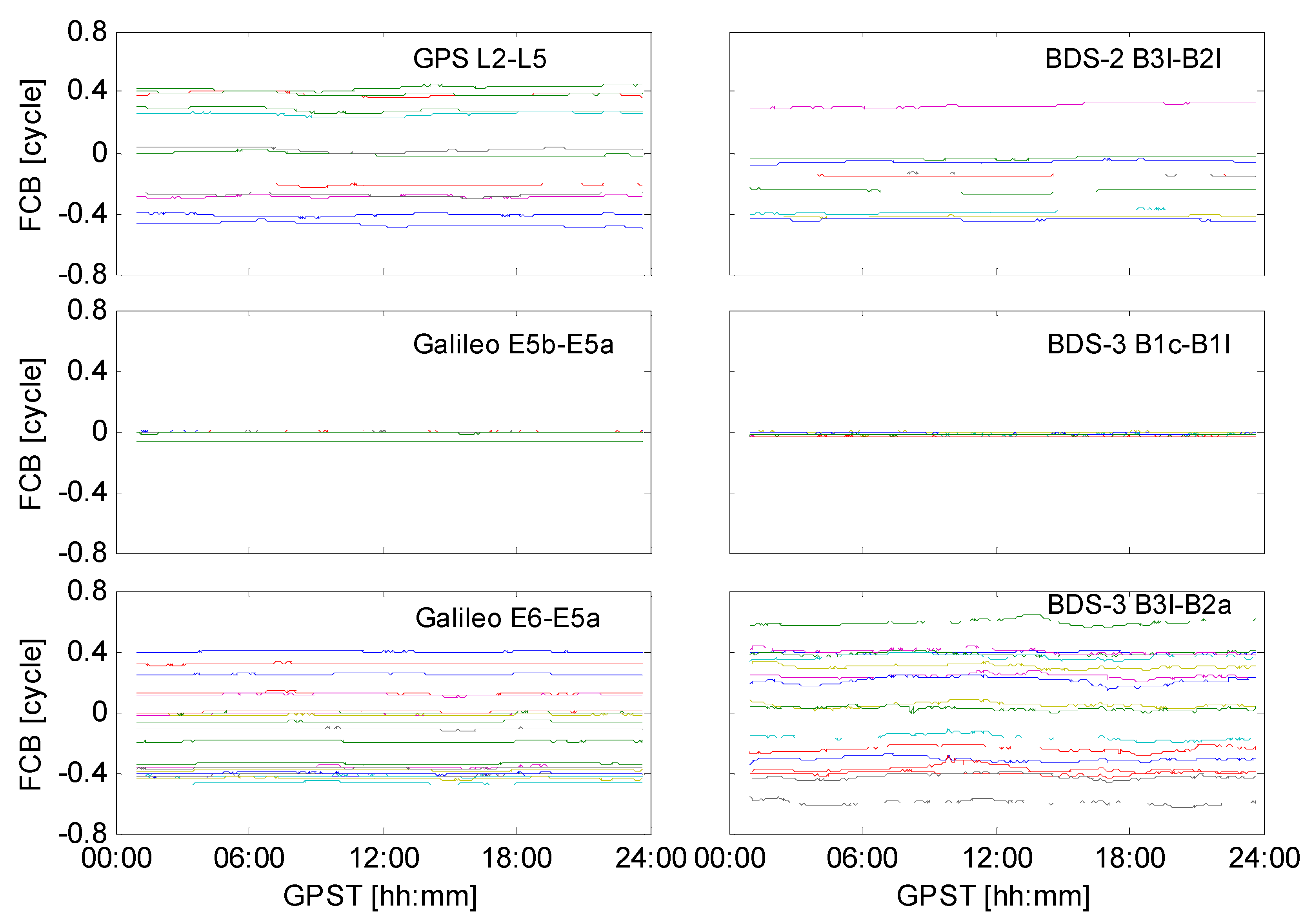
3.2. Results of Multi-Frequency FCB
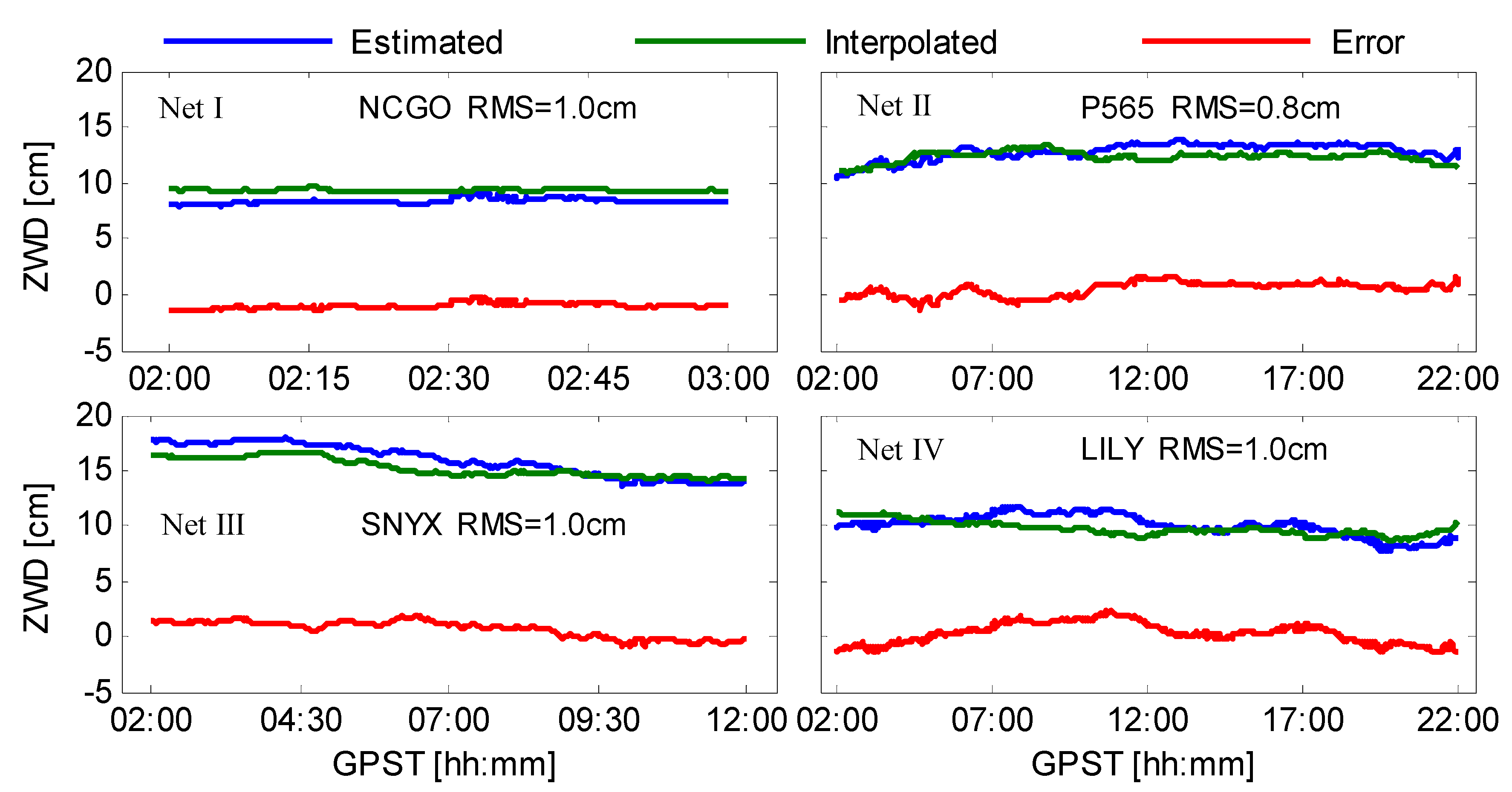
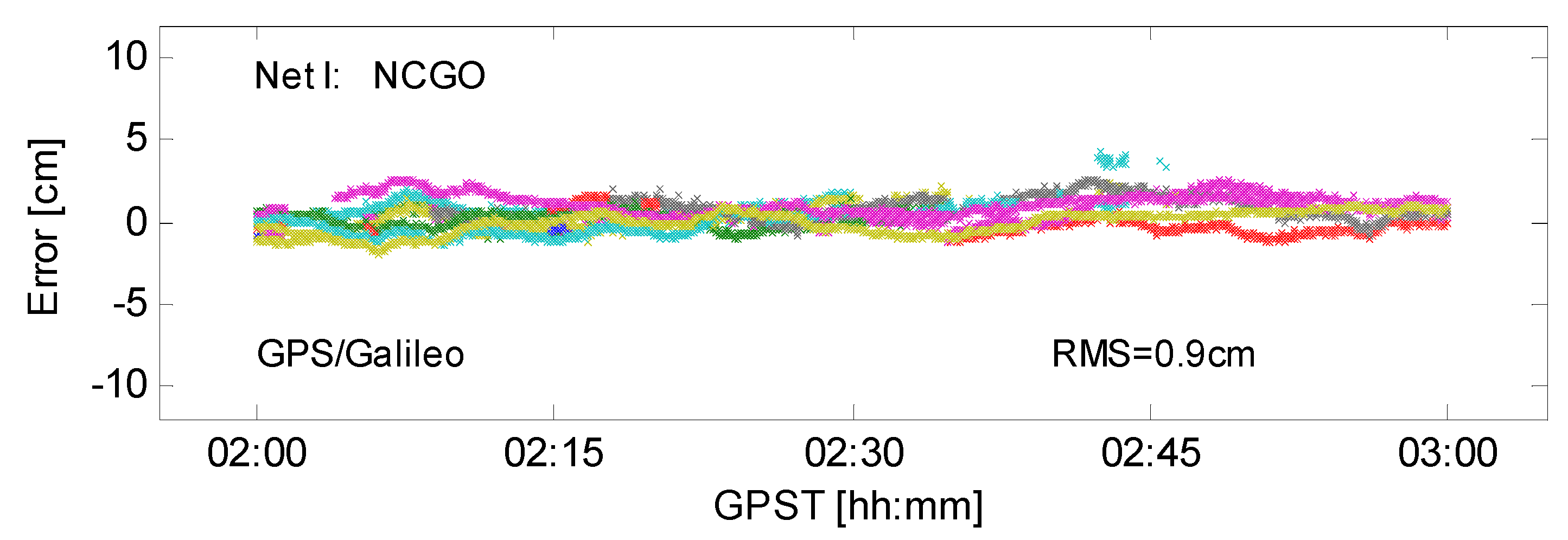
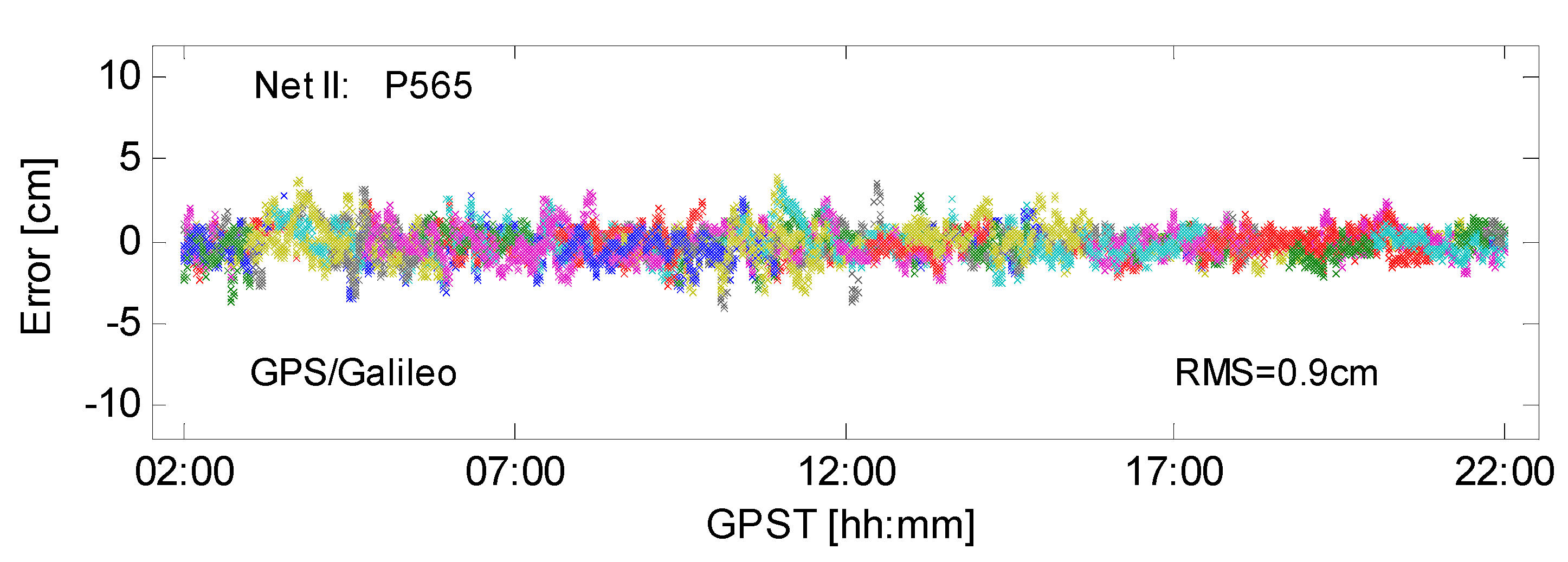
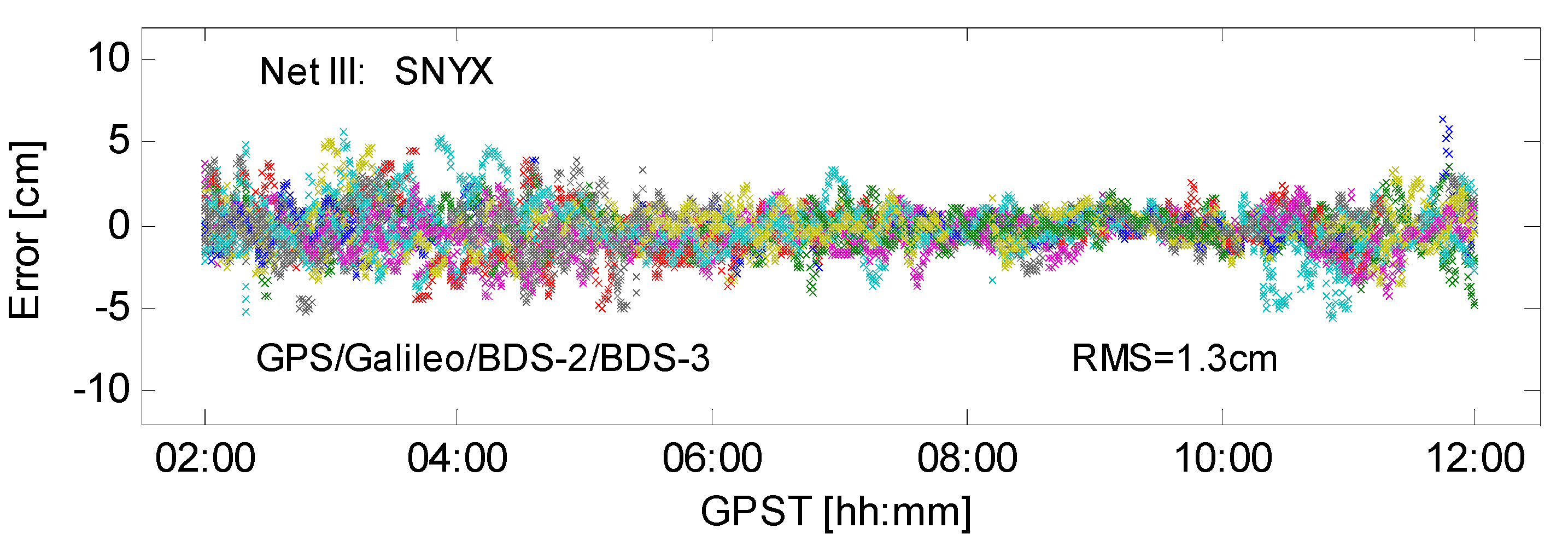
3.3. Results of Regional Atmosphere Modelling
3.4. Results of Single-Epoch PPP AR
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Tang, X.; Li, X.; Roberts, G.W.; Hancock, C.M.; de Ligt, H.; Guo, F. 1 Hz GPS satellites clock correction estimations to support high-rate dynamic PPP GPS applied on the Severn suspension bridge for deflection detection. GPS Solut. 2019, 23, 28. [Google Scholar] [CrossRef]
- Geng, J.; Teferle, F.N.; Shi, C.; Meng, X.; Dodson, A.H.; Liu, J. Ambiguity resolution in precise point positioning with hourly data. GPS Solut. 2009, 13, 263–270. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Li, P.; Guo, F. Ambiguity resolution in precise point positioning with hourly data for global single receiver. Adv. Space Res. 2013, 51, 153–161. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X.; Wang, J.; Ren, X. Modeling and assessment of triple-frequency BDS precise point positioning. J. Geod. 2016, 90, 1223–1235. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, X.; Liu, J. A comparison of three widely used GPS triple-frequency precise point positioning models. GPS Solut. 2019, 23, 121. [Google Scholar] [CrossRef]
- Elsobeiey, M. Precise point positioning using triple-frequency GPS measurements. J. Navig. 2015, 68, 480–492. [Google Scholar] [CrossRef] [Green Version]
- Duong, V.; Harima, K.; Choy, S.; Laurichesse, D.; Rizos, C. An optimal linear combination model to accelerate PPP convergence using multi-frequency multi-GNSS measurements. GPS Solut. 2019, 23, 49. [Google Scholar] [CrossRef]
- Cao, X.; Li, J.; Zhang, S.; Kuang, K.; Gao, K.; Zhao, Q.; Hong, H. Uncombined precise point positioning with triple-frequency GNSS signals. Adv. Space Res. 2019, 63, 2745–2756. [Google Scholar] [CrossRef]
- Jin, S.; Su, K. PPP models and performances from single-to quad-frequency BDS observations. Satell. Navig. 2020, 1, 16. [Google Scholar] [CrossRef]
- Geng, J.; Bock, Y. Triple-frequency GPS precise point positioning with rapid ambiguity resolution. J. Geod. 2013, 87, 449–460. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Liu, G.; Feng, G.; Yuan, Y.; Zhang, K.; Ren, X. Triple-frequency PPP ambiguity resolution with multi-constellation GNSS: BDS and Galileo. J. Geod. 2019, 93, 1105–1122. [Google Scholar] [CrossRef]
- Li, X.; Liu, G.; Li, X.; Zhou, F.; Feng, G.; Yuan, Y.; Zhang, K. Galileo PPP rapid ambiguity resolution with five-frequency observations. GPS Solut. 2020, 24, 24. [Google Scholar] [CrossRef]
- Gu, S.; Lou, Y.; Shi, C.; Liu, J. BeiDou phase bias estimation and its application in precise point positioning with triple-frequency observable. J. Geod. 2015, 89, 979–992. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X.; Ge, M.; Schuh, H. Three-frequency BDS precise point positioning ambiguity resolution based on raw observables. J. Geod. 2018, 92, 1357–1369. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Zhang, X.; Li, P. Estimating multi-frequency satellite phase biases of BeiDou using maximal decorrelated linear ambiguity combinations. GPS Solut. 2019, 23, 42. [Google Scholar] [CrossRef]
- Geng, J.; Guo, J.; Meng, X.; Gao, K. Speeding up PPP ambiguity resolution using triple-frequency GPS/BeiDou/Galileo/QZSS data. J. Geod. 2020, 94, 6. [Google Scholar] [CrossRef] [Green Version]
- Laurichesse, D.; Banville, S. Innovation: Instantaneous Centimeter-level Multi-frequency Precise Point Positioning. GPS World 4 July 2018. Available online: https://www.gpsworld.com/innovation-instantaneous-centimeter-level-multi-frequency-precise-point-positioning/ (accessed on 1 September 2021).
- Geng, J.; Guo, J.; Chang, H.; Li, X. Toward global instantaneous decimeter-level positioning using tightly coupled multi-constellation and multi-frequency GNSS. J. Geod. 2019, 93, 977–991. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Guo, J. Beyond three frequencies: An extendable model for single-epoch decimeter-level point positioning by exploiting Galileo and BeiDou-3 signals. J. Geod. 2020, 94, 14. [Google Scholar] [CrossRef]
- Guo, J.; Xin, S. Toward single-epoch 10-centimeter precise point positioning using Galileo E1/E5a and E6 signals. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 2870–2887. [Google Scholar]
- Li, X.; Zhang, X.; Ge, M. Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J. Geod. 2011, 85, 151–158. [Google Scholar] [CrossRef]
- Li, X.; Huang, J.; Li, X.; Lyu, H.; Wang, B.; Xiong, Y.; Xie, W. Multi-constellation GNSS PPP instantaneous ambiguity resolution with precise atmospheric corrections augmentation. GPS Solut. 2021, 25, 107. [Google Scholar] [CrossRef]
- Schmid, R.; Steigenberger, P.; Gendt, G.; Ge, M.; Rothacher, M. Generation of a consistent absolute phase-center correction model for GPS receiver and satellite antennas. J. Geod. 2007, 81, 781–798. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on GPS carrier phase. Astrodynamics 1992, 1991, 1647–1660. [Google Scholar]
- Montenbruck, O.; Hugentobler, U.; Dach, R.; Steigenberger, P.; Hauschild, A. Apparent clock variations of the Block IIF-1 (SVN62) GPS satellite. GPS Solut. 2012, 16, 303–313. [Google Scholar] [CrossRef]
- Li, H.; Zhou, X.; Wu, B. Fast estimation and analysis of the inter-frequency clock bias for Block IIF satellites. GPS Solut. 2013, 17, 347–355. [Google Scholar] [CrossRef]
- Xia, Y.; Pan, S.; Zhao, Q.; Wang, D.; Gao, W. Characteristics and modelling of BDS satellite inter-frequency clock bias for triple-frequency PPP. Surv. Rev. 2020, 52, 38–48. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, X.; Guo, F.; Liu, J. GPS inter-frequency clock bias estimation for both uncombined and ionospheric-free combined triple-frequency precise point positioning. J. Geod. 2019, 93, 473–487. [Google Scholar] [CrossRef]
- Wang, N.; Yuan, Y.; Li, Z.; Montenbruck, O.; Tan, B. Determination of differential code biases with multi-GNSS observations. J. Geod. 2016, 90, 209–228. [Google Scholar] [CrossRef]
- Zhou, F.; Dong, D.; Li, P.; Li, X.; Schuh, H. Influence of stochastic modeling for inter-system biases on multi-GNSS undifferenced and uncombined precise point positioning. GPS Solut. 2019, 23, 59. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X.; Ren, X.; Zuo, X.; Pan, Y. Generating GPS satellite fractional cycle bias for ambiguity-fixed precise point positioning. GPS Solut. 2016, 20, 771–782. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Zhang, H.; Wickert, J. A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J. Geod. 2013, 87, 405–416. [Google Scholar] [CrossRef]
- Wang, J.; Huang, G.; Yang, Y.; Zhang, Q.; Gao, Y.; Xiao, G. FCB estimation with three different PPP models: Equivalence analysis and experiment tests. GPS Solut. 2019, 23, 93. [Google Scholar] [CrossRef]
- Temiissen, J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Verhagen, S.; Teunissen, P.J.G. The ratio test for future GNSS ambiguity resolution. GPS Solut. 2013, 17, 535–548. [Google Scholar] [CrossRef]
- Lu, L.; Ma, L.; Liu, W.; Wu, T.; Chen, B. A Triple Checked Partial Ambiguity Resolution for GPS/BDS RTK Positioning. Sensors 2019, 19, 5034. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Feng, Y. Reliability of partial ambiguity fixing with multiple GNSS constellations. J. Geod. 2013, 87, 1–14. [Google Scholar] [CrossRef]
- Gao, W.; Gao, C.; Pan, S. A method of GPS/BDS/GLONASS combined RTK positioning for middle-long baseline with partial ambiguity resolution. Surv. Rev. 2017, 49, 212–220. [Google Scholar] [CrossRef]
- Dong, D.N.; Bock, Y. Global Positioning System network analysis with phase ambiguity resolution applied to crustal deformation studies in California. J. Geophys. Res. Solid Earth 1989, 94, 3949–3966. [Google Scholar] [CrossRef]
- Shi, J.; Xu, C.; Guo, J.; Gao, Y. Local troposphere augmentation for real-time precise point positioning. EarthPlanets Space 2014, 66, 30. [Google Scholar] [CrossRef] [Green Version]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef] [Green Version]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Frequency | Wavelength/m | Tag | System | Frequency | Wavelength/m | Tag |
|---|---|---|---|---|---|---|---|
| GPS | L2-L5 | 5.86 | EWL | BDS-2 | B3I-B2I | 4.88 | EWL |
| L1-L2 | 0.86 | WL | B1I-B3I | 1.02 | WL | ||
| L1 + L2 | 0.11 | NL | B1I + B3I | 0.11 | NL | ||
| Galileo | E5b-E5a | 9.77 | EWL | BDS-3 | B1c-B1I | 20.93 | EWL |
| E6-E5a | 2.93 | EWL | B3I-B2a | 3.26 | EWL | ||
| E1-E5a | 0.75 | WL | B1I-B3I | 1.02 | WL | ||
| E1 + E5a | 0.11 | NL | B1I + B3I | 0.11 | NL |
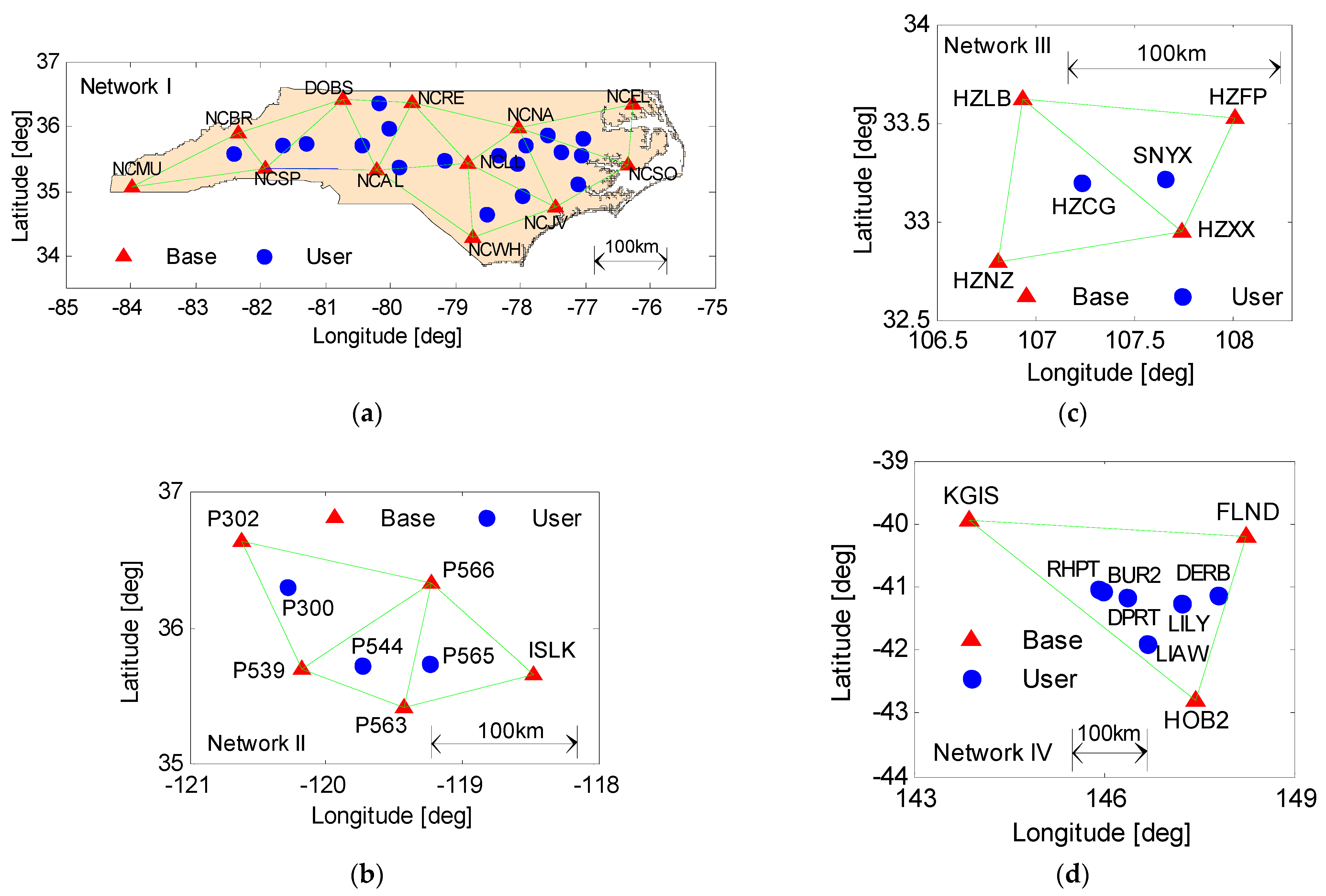
| # | Location | Average Inter-Station Distance | Time | Rate | Duration | Observation Type |
|---|---|---|---|---|---|---|
| I | North Carolina, USA | 139.1 km | 2020 DOY325 | 1 s | 1 h | GPS L1/L2 Galileo E1/E5a |
| II | California, USA | 102.6 km | 2020 DOY148 | 30 s | 20 h | GPS L1/L2/L5 Galileo E1/E5a/E5b |
| III | Shaanxi, China | 91.4 km | 2020 DOY148 | 30 s | 10 h | GPS L1/L2/L5 Galileo E1/E5a/E6/E5b BDS-2 B1I/B2I/B3I BDS-3 B1c/B1I/B2a/B3I |
| IV | Hobart, Australia | 369.5 km | 2021DOY182 | 30 s | 20 h | GPS L1/L2/L5 Galileo E1/E5a/E6/E5b BDS-2 B1I/B2I/B3I BDS-3 B1c/B1I/B2a/B3I |
| STD (Cycle) | GPS L2-L5 | Galileo E5b-E5a | Galileo E6-E5a | BDS-2 B3I-B2I | BDS-3 B1c-B1I | BDS-3 B3I-B2a |
|---|---|---|---|---|---|---|
| Maximum | 0.014 | 0.002 | 0.007 | 0.015 | 0.003 | 0.025 |
| Minimum | 0.007 | 0.001 | 0.004 | 0.004 | 0.001 | 0.008 |
| Average | 0.011 | 0.002 | 0.005 | 0.008 | 0.002 | 0.016 |
| System | WL FCB STD (Cycle) | NL FCB STD (Cycle) | |||||
|---|---|---|---|---|---|---|---|
| Maximum | Minimum | Average | Maximum | Minimum | Average | ||
| GPS | 0.070 | 0.021 | 0.041 | 0.116 | 0.028 | 0.062 | |
| Galileo | 0.022 | 0.010 | 0.014 | 0.115 | 0.048 | 0.076 | |
| BDS-2 | IGSO | 0.041 | 0.016 | 0.028 | 0.054 | 0.019 | 0.040 |
| MEO | 0.044 | 0.028 | 0.037 | 0.184 | 0.144 | 0.170 | |
| BDS-3 | 0.051 | 0.020 | 0.033 | 0.141 | 0.045 | 0.084 | |
| Site | Without Constraint | With Constraint | ||||||
|---|---|---|---|---|---|---|---|---|
| Solution A | Solution B | Solution C | Solution D | |||||
| H (cm) | V (cm) | H (cm) | V (cm) | H (cm) | V (cm) | H (cm) | V (cm) | |
| Network I with 139.1 km of inter-station distance 0.9 cm) | ||||||||
| HIPT | 74.9 | 88.2 | - | - | 2.3 | 3.8 | 0.6 | 1.2 |
| NCEC | 60.1 | 96.9 | - | - | 2.4 | 3.7 | 0.8 | 2.7 |
| NCET | 74.5 | 89.0 | - | - | 2.7 | 5.4 | 1.2 | 2.0 |
| NCGO | 71.1 | 102.4 | - | - | 3.0 | 5.2 | 1.4 | 5.3 |
| NCHI | 72.2 | 95.6 | - | - | 2.7 | 4.2 | 0.8 | 2.3 |
| NCKN | 63.0 | 93.0 | - | - | 2.6 | 5.1 | 1.6 | 3.8 |
| NCMG | 70.4 | 98.8 | - | - | 2.9 | 4.7 | 0.9 | 2.0 |
| NCNB | 70.6 | 108.7 | - | - | 3.4 | 4.7 | 0.7 | 1.1 |
| NCSA | 80.7 | 120.2 | - | - | 2.7 | 3.9 | 0.7 | 1.2 |
| NCSF | 52.9 | 82.0 | - | - | 2.9 | 4.4 | 2.0 | 2.9 |
| NCSW | 72.0 | 145.4 | - | - | 3.6 | 5.0 | 0.7 | 1.2 |
| NCTA | 80.0 | 96.3 | - | - | 3.0 | 3.8 | 0.7 | 1.9 |
| NCTR | 78.4 | 117.4 | - | - | 2.2 | 4.2 | 1.1 | 1.5 |
| NCWA | 87.0 | 90.4 | - | - | 3.1 | 4.8 | 0.6 | 1.9 |
| NCWC | 72.4 | 87.4 | - | - | 2.1 | 3.6 | 0.6 | 1.2 |
| NCWL | 71.5 | 88.6 | - | - | 3.1 | 4.0 | 0.7 | 3.6 |
| NCWM | 53.4 | 77.2 | - | - | 2.3 | 3.6 | 0.8 | 2.3 |
| SNFD | 57.4 | 86.9 | - | - | 4.0 | 6.2 | 1.8 | 1.5 |
| Average | 70.1 | 98.0 | - | - | 2.8 | 4.5 | 1.0 | 2.2 |
| Network II with 102.6 km of inter-station distance 1.0 cm) | ||||||||
| P300 | 46.2 | 93.6 | 12.5 | 28.1 | 2.6 | 4.1 | 1.2 | 2.1 |
| P544 | 42.5 | 76.2 | 13.9 | 30.0 | 1.8 | 4.0 | 1.1 | 2.0 |
| P565 | 35.3 | 71.8 | 12.3 | 28.4 | 2.3 | 4.9 | 1.0 | 2.7 |
| Average | 41.3 | 80.5 | 12.9 | 28.8 | 2.3 | 4.3 | 1.1 | 2.3 |
| Network III with 91.4 km of inter-station distance 1.6 cm) | ||||||||
| HZCG | 22.8 | 52.3 | 6.7 | 14.9 | 2.4 | 5.7 | 0.8 | 2.7 |
| SNYX | 21.2 | 56.9 | 6.8 | 13.7 | 2.0 | 4.8 | 0.7 | 2.4 |
| Average | 22.0 | 54.6 | 6.8 | 14.3 | 2.2 | 5.3 | 0.8 | 2.6 |
| Network IV with 369.5 km of inter-station distance 5.2 cm) | ||||||||
| BUR2 | 21.6 | 50.7 | 13.3 | 20.2 | 9.0 | 9.5 | 4.5 | 6.0 |
| DERB | 20.0 | 40.4 | 9.2 | 17.9 | 5.1 | 9.2 | 2.2 | 6.0 |
| DPRT | 20.8 | 54.9 | 13.0 | 20.2 | 8.4 | 9.6 | 4.0 | 5.6 |
| LIAW | 45.9 | 82.3 | 16.5 | 35.4 | 8.3 | 11.9 | 5.3 | 6.9 |
| LILY | 20.5 | 54.3 | 10.5 | 21.7 | 6.3 | 8.5 | 3.2 | 5.2 |
| RHPT | 26.1 | 53.7 | 13.9 | 20.8 | 9.2 | 10.0 | 4.7 | 6.5 |
| Average | 25.8 | 56.1 | 12.7 | 22.7 | 7.7 | 9.8 | 4.0 | 6.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, W.; Zhao, Q.; Meng, X.; Pan, S. Performance of Single-Epoch EWL/WL/NL Ambiguity-Fixed Precise Point Positioning with Regional Atmosphere Modelling. Remote Sens. 2021, 13, 3758. https://doi.org/10.3390/rs13183758
Gao W, Zhao Q, Meng X, Pan S. Performance of Single-Epoch EWL/WL/NL Ambiguity-Fixed Precise Point Positioning with Regional Atmosphere Modelling. Remote Sensing. 2021; 13(18):3758. https://doi.org/10.3390/rs13183758
Chicago/Turabian StyleGao, Wang, Qing Zhao, Xiaolin Meng, and Shuguo Pan. 2021. "Performance of Single-Epoch EWL/WL/NL Ambiguity-Fixed Precise Point Positioning with Regional Atmosphere Modelling" Remote Sensing 13, no. 18: 3758. https://doi.org/10.3390/rs13183758
APA StyleGao, W., Zhao, Q., Meng, X., & Pan, S. (2021). Performance of Single-Epoch EWL/WL/NL Ambiguity-Fixed Precise Point Positioning with Regional Atmosphere Modelling. Remote Sensing, 13(18), 3758. https://doi.org/10.3390/rs13183758