
Improved 1-km-Resolution Hourly Estimates of Aerosol Optical Depth Using Conditional Generative Adversarial Networks


 ,
,  ,
, 
Abstract
:1. Introduction
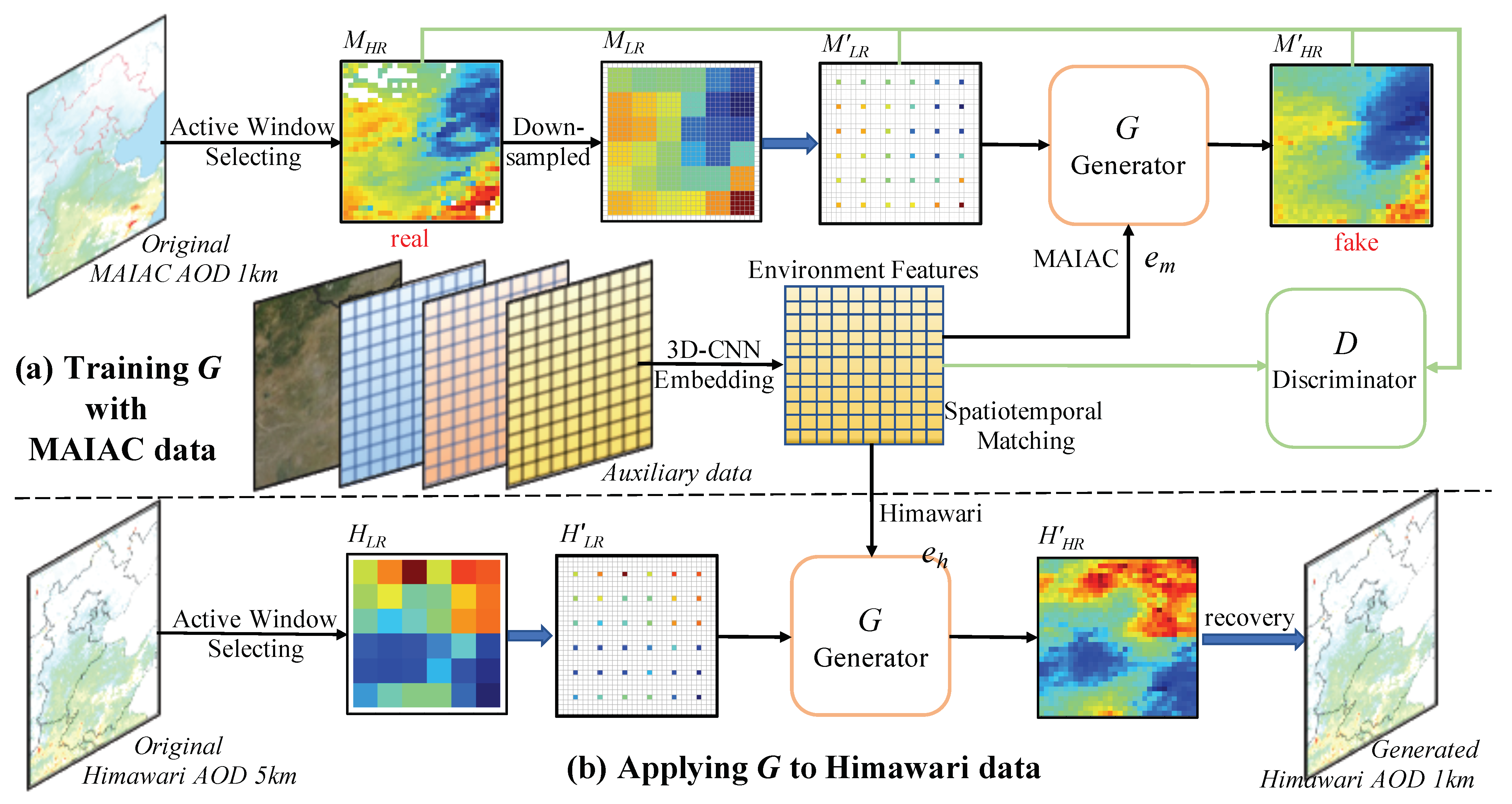
- Taking advantage of the high spatial resolution of MODIS MAIAC AOD products and high temporal resolution of Himawari AOD products, a data-driven method is proposed to improve the spatio-temporal resolution of AOD. It uses MAIAC AOD as training data to capture the complex spatial patterns and perform estimation to Himawari AOD based on this learned knowledge.
- According to the features of AOD data and the correlation between auxiliary data (e.g., meteorological, land-related data are described in Section 2.3) and AOD, the proposed model AeroCGAN constructs two conditions: the sampled data as a spatial condition for generating reasonable spatial distribution; and the environment features extracted from auxiliary data as an environmental condition for improving the accuracy and producing more realistic details.
- The model can effectively capture complex spatial patterns and preprocess the data with an active window selection strategy. In this way, the model could increase spatial coverage and generate high spatial resolution AOD with more realistic details, which is on a reasonable spatial scale.
2. Materials and Methods
2.1. The Fusion Framework for Spatiotemporal AOD
- Spatiotemporal Difference: The surface reflectance shows temporally slow and spatially high variations, whereas the aerosol loading changes very fast over time and varies only on a limited space scale. Different from natural images, the variations in remote sensing images are mainly caused by phenology, seasons, disaster, or human activities. Most of the land surface changes in multi-temporal optical remote sensing can be regarded as a relatively independent slow feature for analysis [28]. In contrast, AOD is a physical quantity that characterizes the degree of atmospheric turbidity, which has different spatiotemporal heterogeneity and dramatic variability; meanwhile, it has strong correlation with other atmospheric or geographic environmental information data [29];
- Spectral Difference: Usually, natural images contain three bands of red, green, and blue. Optical remote sensing images usually have multiple bands which can provide more information for the analysis of characteristics. However, AOD data have its own physical meaning that is different from multi-spectral or hyper-spectral images;
- Feature Difference: The features in natural images usually have strong logical correlation. In addition, high- and low-resolution natural images are basically coherent in visual structure information. Optical remote sensing has complex feature types and rich textural features, and their features have lower logical correlation. However, features of AOD images tend to be monotonous and poor, so that the complexity of the spatiotemporal heterogeneity makes its estimation and validation more difficult.
2.2. Network Architecture of AeroCGAN
2.2.1. Conditions of Proposed AeroCGAN
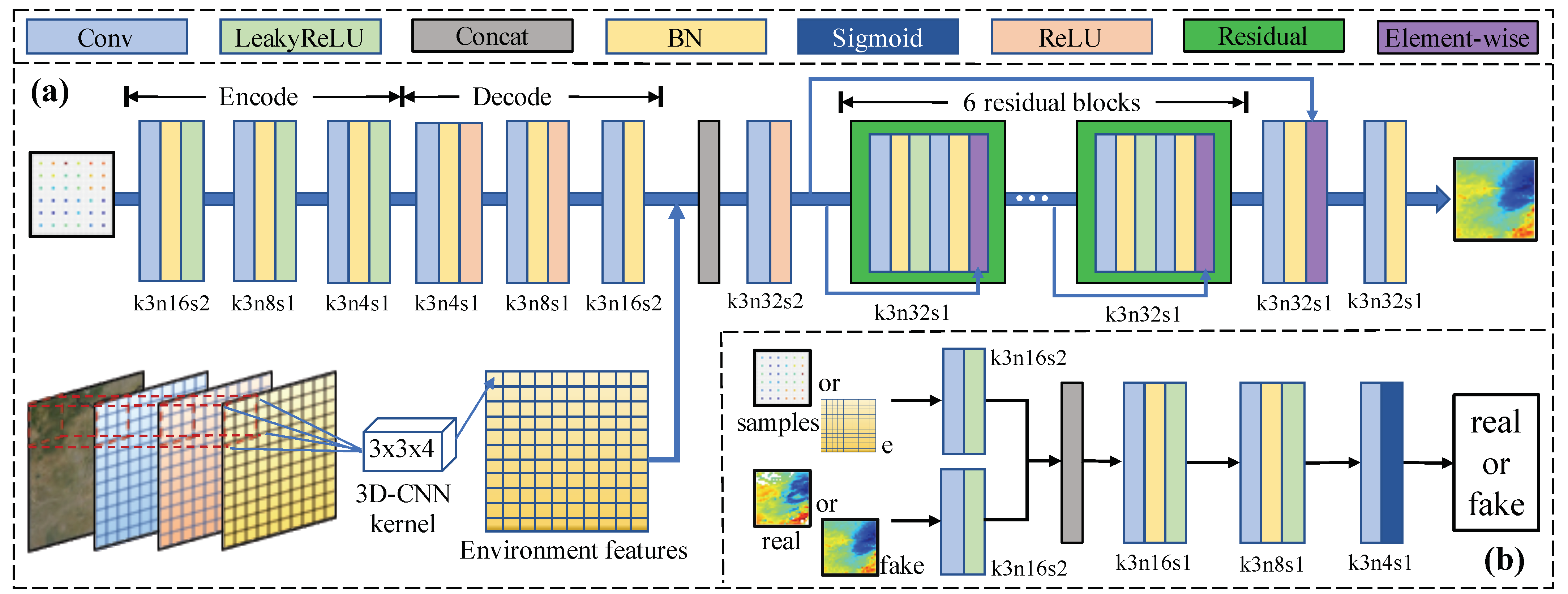
2.2.2. Generator
2.2.3. Discriminator
2.2.4. Loss Functions
2.3. Study Area and Data Description
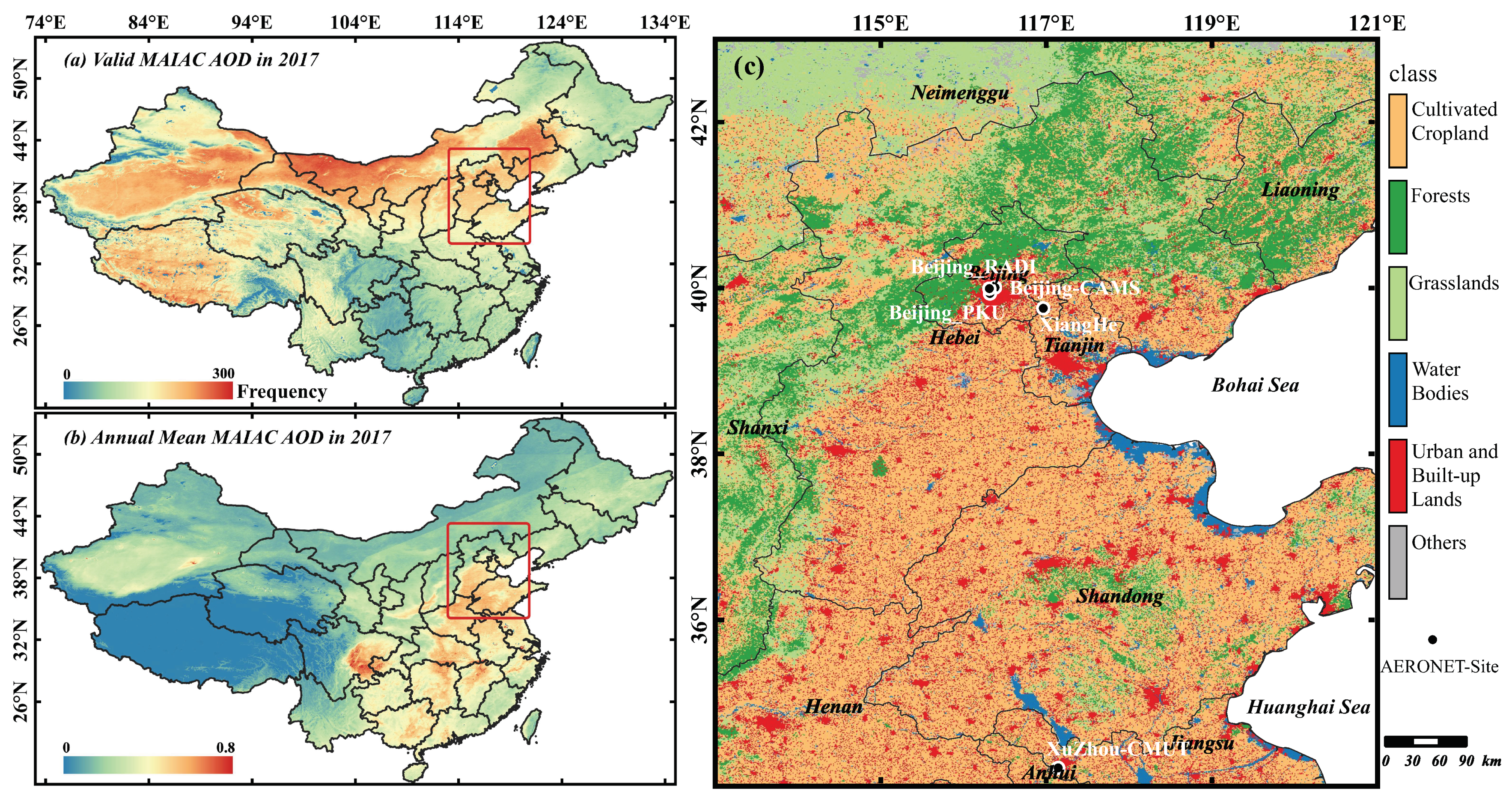
- MODIS MAIAC AOD products: The MODIS Multiple Angle Implication of Atmospheric Correction (MAIAC) algorithm enables simultaneous retrieval of aerosol loading at high resolution of 1 km, providing an excellent opportunity for aerosol research at finer spatial scales. It is widely used in various aerosol-related studies. This study collected the MAIAC AOD products from (MCD19A2: https://lpdaac.usgs.gov/products/mcd19a2v006/ (accessed on 15 June 2020)), and adopted it to training the initial model.
- Himawari AOD products: Himawari-8 is a Japanese geostationary satellite operated by Japan meteorology agency, carrying Advanced Himawari Imager (AHI), a multiwavelength imager [6]. The full disk observation with high temporal resolution (10 min) exhibits a prominent advantage in monitoring aerosols over the East Asia region. The AHI has 16 channels from 460 to 13,300 nm to capture visible and infrared spectral data. This study collected L3ARP Hourly Himawari AOD (L3ARP: https://www.eorc.jaxa.jp/ptree/index.html (accessed on 15 June 2020)), which is in the band of 500 nm. The trained model is transferred to Himawari data to obtain the estimation of 1-km-resolution, hourly Himawari AOD products.
- AERONET AOD data: The AERONET project is a federation of ground-based remote sensing aerosol networks. It has provided long-term, continuous, and readily accessible public domain database of aerosol optical, microphysical, and radiative properties for aerosol research and characterization, validation of satellite retrievals, and synergism with other databases. The provided spectral AOD measurements with a high temporal resolution (15 min) in the bands of 340–1060 nm, and the processing algorithms have evolved from Version 1.0 to Version 2.0 and now Version 3.0 are available from the AERONET website (https://aeronet.gsfc.nasa.gov/ (accessed on 15 June 2020)). This study collected five AERONET sites’ measurements marked in Figure 3c, which is in the band of 500 nm for validation with Himawari AOD;
- Auxiliary data: The auxiliary data include surface reflectance, temperature, wind speed, and relative humidity (Table 2). The surface reflectance (SR) data are collected from (MCD19A1: https://lpdaac.usgs.gov/products/mcd19a1v006/ (accessed on 15 June 2020)). The temperature (TEM) and relative humidity (RH) are collected from the European Center for Medium-Range Weather Forecasts (ECMWF) atmospheric reanalysis products (ERA5: https://www.ecmwf.int/en/forecasts/datasets/ (accessed on 15 June 2020)), wind speed (WS) is calculated from the two wind components (10 m u-component and 10 m v-component of wind collected from ECMWF ERA5) by using the vector synthesis method. All of the auxiliary data (SR, TEM, RH, and WS) will be preprocessed and extracted as environment features by a 3D-CNN network.
2.4. Model Parameters and Experiment Design
- 1
- Simulation experiments with MODIS MAIAC AOD, which is corresponding to stage (a) in Figure 1. During this experiment, we acquire about 66,396 MAIAC AOD blocks in total after data preprocessing, in which 53,000 blocks are taken as the training dataset and 13,396 blocks are taken as the validation dataset. In addition, the MAIAC AOD product on 1 June 2017 was selected as testing data for displaying the performance of the proposed model.
- 2
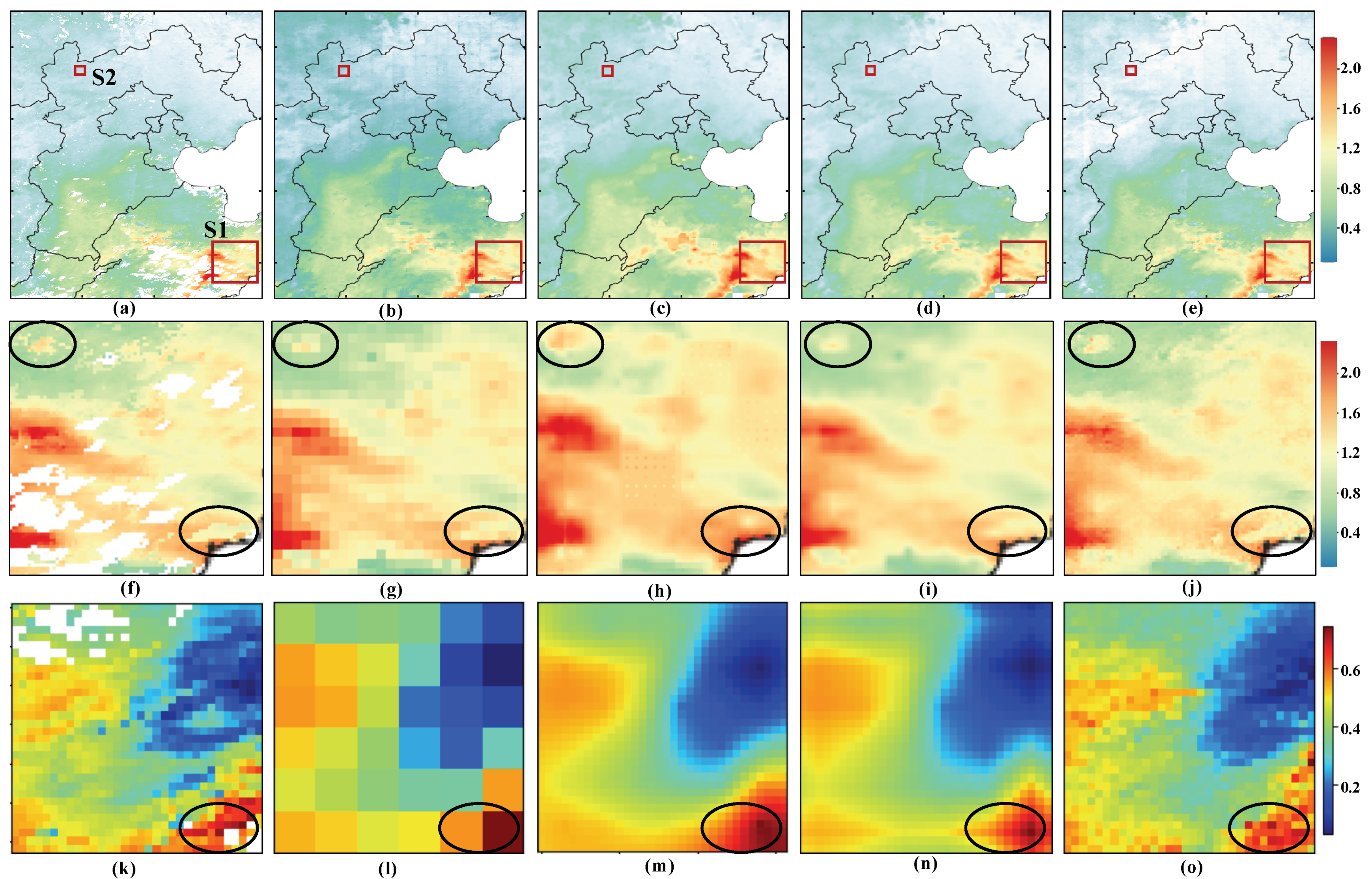
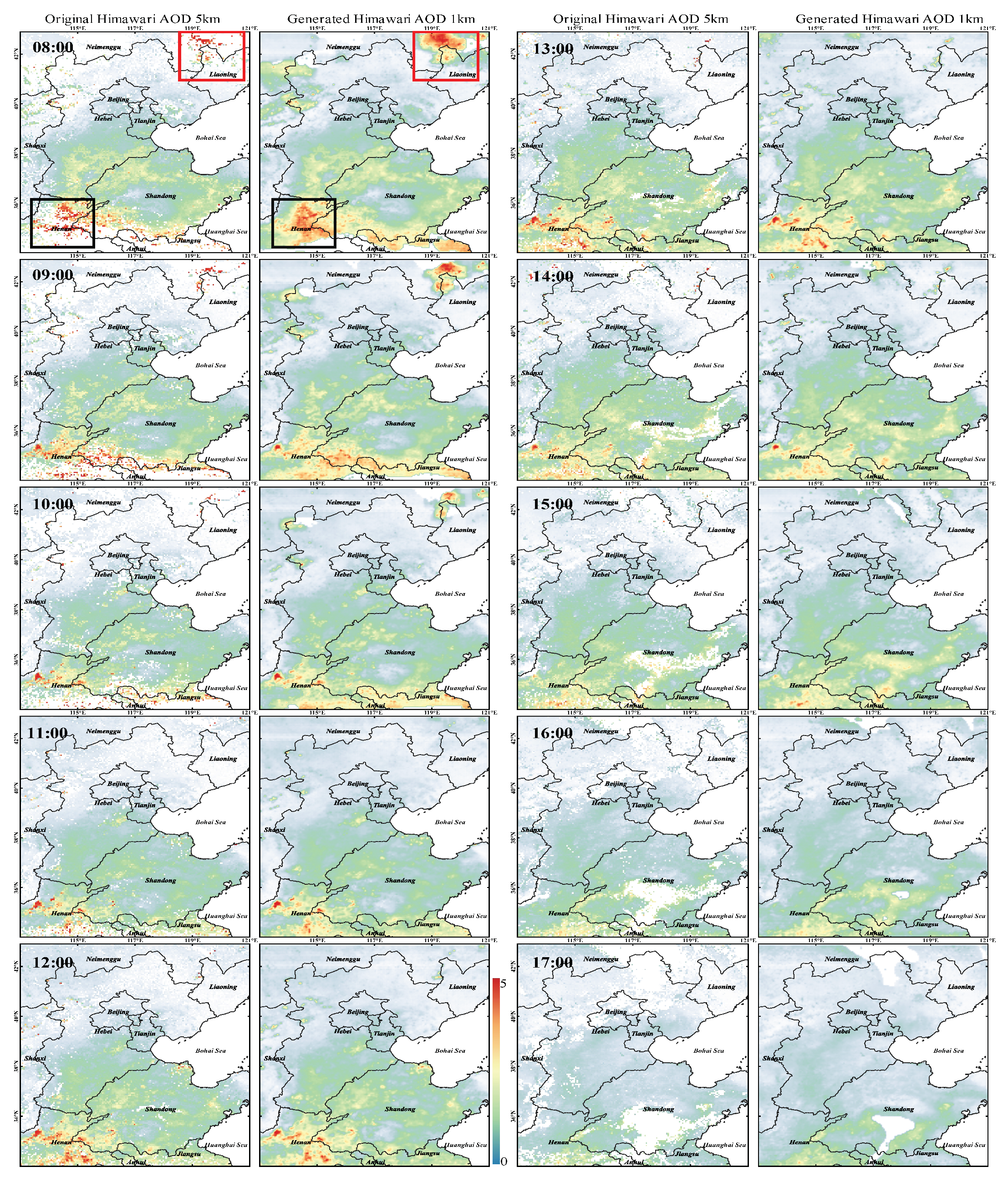
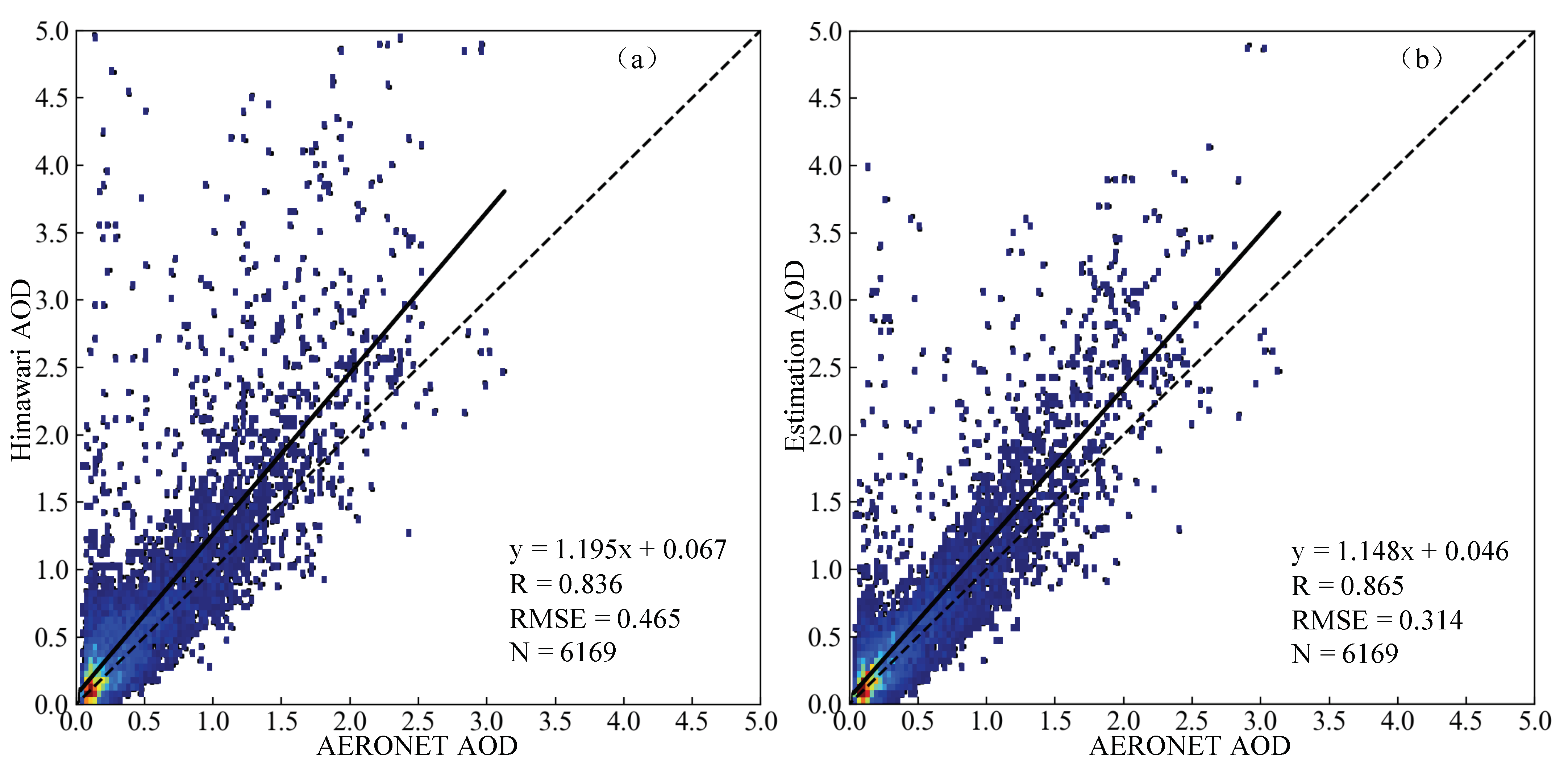
- Apply the model to real Himawari AOD, which is corresponding to stage (b) in Figure 1. During this experiment, we compared the spatial distribution of the original 5 km Himawari AOD and generated 1 km Himawari AOD, which picked hourly data on 1 June 2017 for display. Moreover, we validate generated AOD with ground AERONET monitoring station data.
3. Results and Discussion
3.1. Training and Validation Model with MAIAC AOD
3.2. Applying the Model to Himawari AOD
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, L. High-Resolution Mapping of Aerosol Optical Depth and Ground Aerosol Coefficients for Mainland China. Remote Sens. 2021, 13, 2324. [Google Scholar] [CrossRef]
- Logothetis, S.A.; Salamalikis, V.; Kazantzidis, A. The impact of different aerosol properties and types on direct aerosol radiative forcing and efficiency using AERONET version 3. Atmos. Res. 2020, 250, 105343. [Google Scholar] [CrossRef]
- Lutsch, E.; Strong, K.; Jones, D.; Blumenstock, T.; Warneke, T. Detection and attribution of wildfire pollution in the Arctic and northern midlatitudes using a network of Fourier-transform infrared spectrometers and GEOS-Chem. Atmos. Chem. Phys. 2020, 20, 12813–12851. [Google Scholar] [CrossRef]
- Kim, G.; Lee, J.; Lee, M.I.; Kim, D. Impacts of Urbanization on Atmospheric Circulation and Aerosol Transport in a Coastal Environment Simulated by the WRF-Chem Coupled with Urban Canopy Model. Atmos. Environ. 2021, 249, 118253. [Google Scholar] [CrossRef]
- Tao, M.; Wang, J.; Li, R.; Wang, L.; Chen, L. Performance of MODIS high-resolution MAIAC aerosol algorithm in China: Characterization and limitation. Atmos. Environ. 2019, 213, 159–169. [Google Scholar] [CrossRef]
- Su, X.; Wang, L.; Zhang, M.; Qin, W.; Bilal, M. A High-Precision Aerosol Retrieval Algorithm (HiPARA) for Advanced Himawari Imager (AHI) data: Development and verification. Remote Sens. Environ. 2021, 253, 112221. [Google Scholar] [CrossRef]
- Wei, X.; Chang, N.B.; Bai, K.; Gao, W. Satellite remote sensing of aerosol optical depth: Advances, challenges, and perspectives. Crit. Rev. Environ. Sci. Technol. 2020, 50, 1640–1725. [Google Scholar] [CrossRef]
- Zou, B.; Liu, N.; Wang, W.; Feng, H.; Lin, Y. An Effective and Efficient Enhanced Fixed Rank Smoothing Method for the Spatiotemporal Fusion of Multiple-Satellite Aerosol Optical Depth Products. Remote Sens. 2020, 12, 1102. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Yuan, Q.; Li, T.; Shen, H.; Zheng, L.; Zhang, L. Large-scale MODIS AOD products recovery: Spatial-temporal hybrid fusion considering aerosol variation mitigation. ISPRS J. Photogramm. Remote Sens. 2019, 157, 1–12. [Google Scholar] [CrossRef]
- Zhang, T.; Zeng, C.; Gong, W.; Wang, L.; Sun, K.; Shen, H.; Zhu, Z.; Zhu, Z. Improving Spatial Coverage for Aqua MODIS AOD using NDVI-Based Multi-Temporal Regression Analysis. Remote Sens. 2017, 9, 340. [Google Scholar] [CrossRef] [Green Version]
- Go, S.; Kim, J.; Sang, S.P.; Kim, M.; Im, J. Synergistic Use of Hyperspectral UV-Visible OMI and Broadband Meteorological Imager MODIS Data for a Merged Aerosol Product. Remote Sens. 2020, 12, 3987. [Google Scholar] [CrossRef]
- Zou, B.; Pu, Q.; Bilal, M.; Weng, Q.; Zhai, L.; Nichol, J. High-Resolution Satellite Mapping of Fine Particulates Based on Geographically Weighted Regression. IEEE Geosci. Remote Sens. Lett. 2017, 13, 495–499. [Google Scholar] [CrossRef]
- Xue, Y.; Xu, H.; Guang, J.; Mei, L.; Guo, J.; Li, C.; Mikusauskas, R.; He, X. Observation of an agricultural biomass burning in central and east China using merged aerosol optical depth data from multiple satellite missions. Int. J. Remote Sens. 2014, 35, 5971–5983. [Google Scholar] [CrossRef]
- Yang, D.; Gueymard, C.A. Probabilistic merging and verification of monthly gridded aerosol products. Atmos. Environ. 2020, 247, 118146. [Google Scholar] [CrossRef]
- Li, L.; Shi, R.; Zhang, L.; Zhang, J.; Gao, W. The data fusion of aerosol optical thickness using universal kriging and stepwise regression in East China. In Proceedings of the SPIE Optical Engineering and Applications, San Diego, CA, USA, 17–21 August 2014. [Google Scholar]
- Wang, J.; Brown, D.G.; Hammerling, D. Geostatistical inverse modeling for super-resolution mapping of continuous spatial processes. Remote Sens. Environ. 2013, 139, 205–215. [Google Scholar] [CrossRef]
- Puttaswamy, S.J.; Nguyen, H.M.; Braverman, A.; Hu, X.; Liu, Y. Statistical data fusion of multi-sensor AOD over the Continental United States. Geocarto Int. 2014, 29, 48–64. [Google Scholar] [CrossRef]
- Liu, P.; Wang, M.; Wang, L.; Han, W. Remote-Sensing Image Denoising with Multi-Sourced Information. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 660–674. [Google Scholar] [CrossRef]
- Liu, P.; Zhang, H.; Eom, K.B. Active Deep Learning for Classification of Hyperspectral Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 712–724. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Liu, P.; Zhao, L.; Wang, G.; Liu, J. Air quality predictions with a semi-supervised bidirectional LSTM neural network. Atmos. Pollut. Res. 2020, 12, 328–339. [Google Scholar] [CrossRef]
- Tang, Q.; Bo, Y.; Zhu, Y. Spatiotemporal fusion of multiple-satellite aerosol optical depth (AOD) products using Bayesian maximum entropy method. J. Geophys. Res. Atmos. 2016, 121, 4034–4048. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Liu, Z.; Wang, Q.; Ban, J.; Chen, N.X.; Li, T. High-resolution daily AOD estimated to full coverage using the random forest model approach in the Beijing-Tianjin-Hebei region. Atmos. Environ. 2019, 203, 70–78. [Google Scholar] [CrossRef]
- Chen, X.; Leeuw, G.; Arola, A.; Liu, S.; Liu, Y.; Li, Z.; Zhang, K. Joint retrieval of the aerosol fine mode fraction and optical depth using MODIS spectral reflectance over northern and eastern China: Artificial neural network method. Remote Sens. Environ. 2020, 249, 112006. [Google Scholar] [CrossRef]
- Lyapustin, A.; Wang, Y.; Korkin, S.; Huang, D. MODIS Collection 6 MAIAC algorithm. Atmos. Meas. Tech. 2018, 11, 5741–5765. [Google Scholar] [CrossRef] [Green Version]
- Liu, N.; Zou, B.; Feng, H.; Wang, W.; Liang, Y. Evaluation and comparison of multiangle implementation of the atmospheric correction algorithm, Dark Target, and Deep Blue aerosol products over China. Atmos. Chem. Phys. 2019, 19, 8243–8268. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Wei, H.; Wang, H.; Zhu, T.; Zhang, K. 3D-CNN-based feature extraction of ground-based cloud images for direct normal irradiance prediction. Sol. Energy 2019, 181, 510–518. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Wu, C.; Zhang, L.; Du, B. Hyperspectral anomaly change detection with slow feature analysis. Neurocomputing 2015, 151, 175–187. [Google Scholar] [CrossRef]
- Chang, I.; Gao, L.; Burton, S.P.; Chen, H.; Diamond, M.S.; Ferrare, R.A.; Flynn, C.J.; Kacenelenbogen, M.; Leblanc, S.E.; Meyer, K.G. Spatiotemporal heterogeneity of aerosol and cloud properties over the southeast Atlantic: An observational analysis. Geophys. Res. Lett. 2021, 48, e2020GL091469. [Google Scholar] [CrossRef]
- Choi, I.J.; Park, R.S.; Lee, J. Impacts of a newly-developed aerosol climatology on numerical weather prediction using a global atmospheric forecasting model. Atmos. Environ. 2019, 197, 77–91. [Google Scholar] [CrossRef]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Networks. Adv. Neural Inf. Process. Syst. 2014, 3, 2672–2680. [Google Scholar]
- Mirza, M.; Osindero, S. Conditional Generative Adversarial Nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Zhu, D.; Cheng, X.; Zhang, F.; Yao, X.; Gao, Y.; Liu, Y. Spatial interpolation using conditional generative adversarial neural networks. Int. J. Geogr. Inf. Sci. 2019, 48, 1–24. [Google Scholar] [CrossRef]
- Wang, C.; Tang, G.; Gentine, P. PrecipGAN: Merging Microwave and Infrared Data for Satellite Precipitation Estimation using Generative Adversarial Network. Geophys. Res. Lett. 2021, 48, e2020GL092032. [Google Scholar]
- Kaufman, Y.J.; Tanré, D.; Remer, L.A.; Vermote, E.F.; Chu, A.; Holben, B.N. Operational remote sensing of tropospheric aerosol over land from EOS moderate resolution imaging spectroradiometer. J. Geophys. Res. Atmos. 1997, 102, 17051–17067. [Google Scholar] [CrossRef]
- Xin, H.; Ding, A.; Liu, L.; Qiang, L.; Fu, C. Effects of aerosol-radiation interaction on precipitation during biomass-burning season in East China. Atmos. Chem. Phys. 2016, 16, 10063–10082. [Google Scholar]
- Wang, X.; Xiaodong, H.E.; Miao, S.; Dou, Y. Numerical simulation of the influence of aerosol radiation effect on urban boundary layer. Sci. China Earth Sci. 2018, 61, 152–166. [Google Scholar] [CrossRef]
- Lai, W.; Huang, J.; Ahuja, N.; Yang, M. Deep laplacian pyramid networks for fast and accurate super-resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Sun, T.; Che, H.; Qi, B.; Wang, Y.; Dong, Y.; Xia, X.; Hong, W.; Gui, K.; Yu, Z.; Zhao, H. Aerosol optical characteristics and their vertical distributions under enhanced haze pollution events: Effect of the regional transport of different aerosol types over eastern China. Atmos. Chem. Phys. 2018, 18, 1–45. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Che, H.; Xia, X.; Wang, Y.; Yang, L.; Chen, J. Aerosol optical properties and its type classification based on multiyear joint observation campaign in North China Plain megalopolis. Chemosphere 2021, 273, 128560. [Google Scholar] [CrossRef]
- Xu, B.; Wang, N.; Chen, T.; Li, M. Empirical Evaluation of Rectified Activations in Convolutional Network. arXiv 2015, arXiv:1505.00853. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Wang, Z.; Jiang, K.; Yi, P. Ultra-Dense GAN for Satellite Imagery Super-Resolution. Neurocomputing 2020, 398, 328–337. [Google Scholar] [CrossRef]
- Xiao, L.; Christakos, G.; He, J.; Lang, Y. Space-Time Ground-Level PM2.5 Distribution at the Yangtze River Delta: A Comparison of Kriging, LUR, and Combined BME-LUR Techniques. J. Environ. Inform. 2020, 36, 33–42. [Google Scholar] [CrossRef]
- Chao, D.; Chen, C.L.; He, K.; Tang, X. Learning a Deep Convolutional Network for Image Super-Resolution. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Explaination |
|---|---|
| original high-resolution MAIAC AOD (1 km, daily) | |
| low-resolution MAIAC AOD down-sampled from the (5 km, daily) | |
| sample data from | |
| generated high-resolution MAIAC AOD (1 km, daily) | |
| original low-resolution Himawari AOD (5 km, hourly) | |
| sample data from | |
| generated high-resolution Himawari AOD (1 km, hourly) | |
| environment features matching MAIAC | |
| environment features matching Himawari |
| Type | Variable | Resolution | Source | |
|---|---|---|---|---|
| AOD | MAIAC AOD | 1 km × 1 km | daily | MCD19A2 |
| Himawari AOD | 5 km × 1 km | hourly | JAXA | |
| AERONET AOD | situ | hourly | AERONET | |
| meteorological | 2 m air temperature | 0.1 × 0.1 | hourly | ECMWF ERA5 |
| 10 m u-component of wind | 0.1 × 0.1 | hourly | ||
| 10 m v-component of wind | 0.1 × 0.1 | hourly | ||
| relative humidity | 0.25 × 0.25 | hourly | ||
| land-related | surface reflectance | 1 km × 1 km | daily | MCD19A1 |
| Model | RMSE | PSNR | SSIM |
|---|---|---|---|
| Kriging | 0.036 | 28.89 | 0.868 |
| SRCNN | 0.071 | 22.81 | 0.796 |
| AeroCGAN (meteorological data) | 0.031 | 30.17 | 0.864 |
| AeroCGAN (surface reflectance) | 0.029 | 30.75 | 0.861 |
| AeroCGAN (3D-CNN embedding) | 0.021 | 33.24 | 0.883 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Liu, P.; Wang, L.; Liu, J.; Song, B.; Zhang, Y.; He, G.; Zhang, H. Improved 1-km-Resolution Hourly Estimates of Aerosol Optical Depth Using Conditional Generative Adversarial Networks. Remote Sens. 2021, 13, 3834. https://doi.org/10.3390/rs13193834
Zhang L, Liu P, Wang L, Liu J, Song B, Zhang Y, He G, Zhang H. Improved 1-km-Resolution Hourly Estimates of Aerosol Optical Depth Using Conditional Generative Adversarial Networks. Remote Sensing. 2021; 13(19):3834. https://doi.org/10.3390/rs13193834
Chicago/Turabian StyleZhang, Luo, Peng Liu, Lizhe Wang, Jianbo Liu, Bingze Song, Yuwei Zhang, Guojin He, and Hui Zhang. 2021. "Improved 1-km-Resolution Hourly Estimates of Aerosol Optical Depth Using Conditional Generative Adversarial Networks" Remote Sensing 13, no. 19: 3834. https://doi.org/10.3390/rs13193834
APA StyleZhang, L., Liu, P., Wang, L., Liu, J., Song, B., Zhang, Y., He, G., & Zhang, H. (2021). Improved 1-km-Resolution Hourly Estimates of Aerosol Optical Depth Using Conditional Generative Adversarial Networks. Remote Sensing, 13(19), 3834. https://doi.org/10.3390/rs13193834