A Novel Vegetation Index for Coffee Ripeness Monitoring Using Aerial Imagery

 ,
,  , and
, and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. UAV Platform and Imagery Acquisition
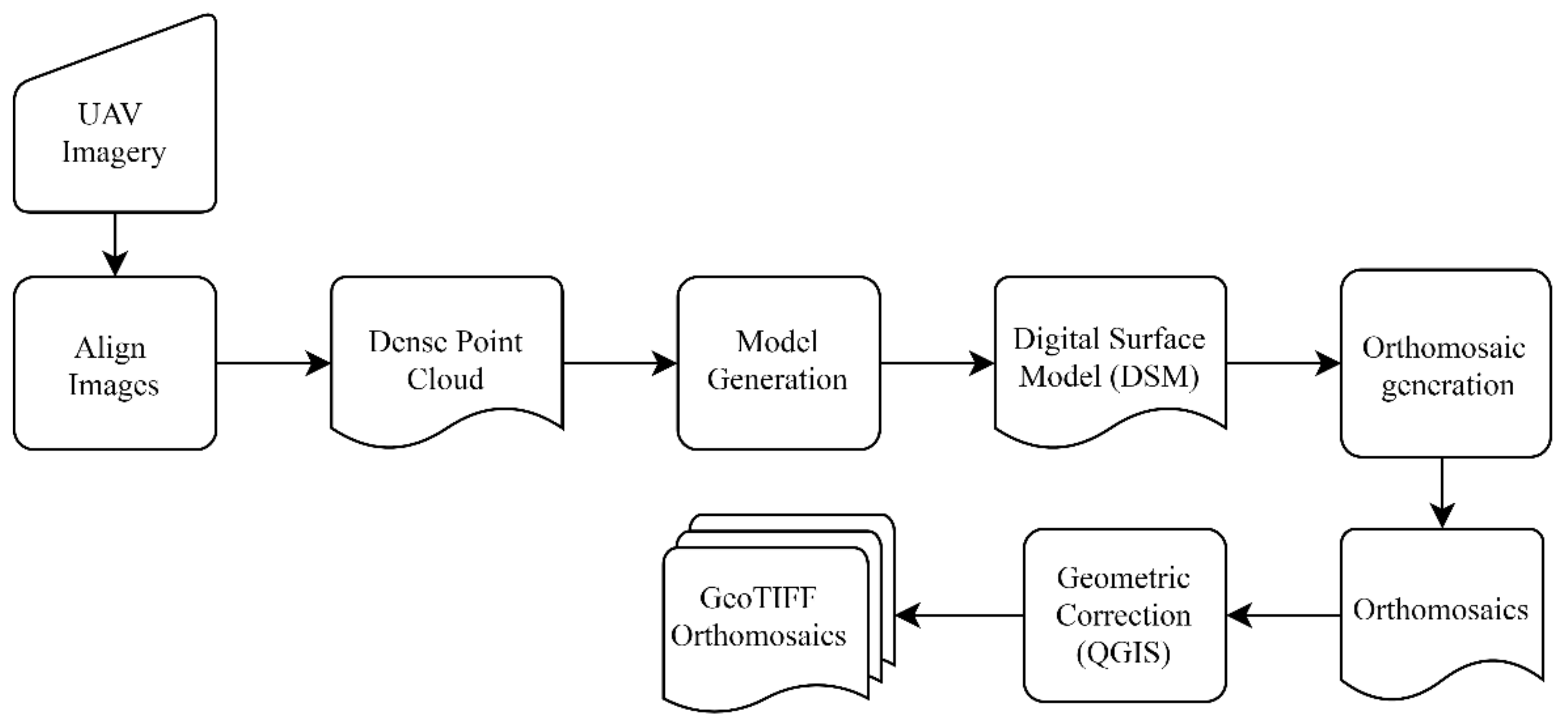
2.3. UAV Imagery Pre-Processing
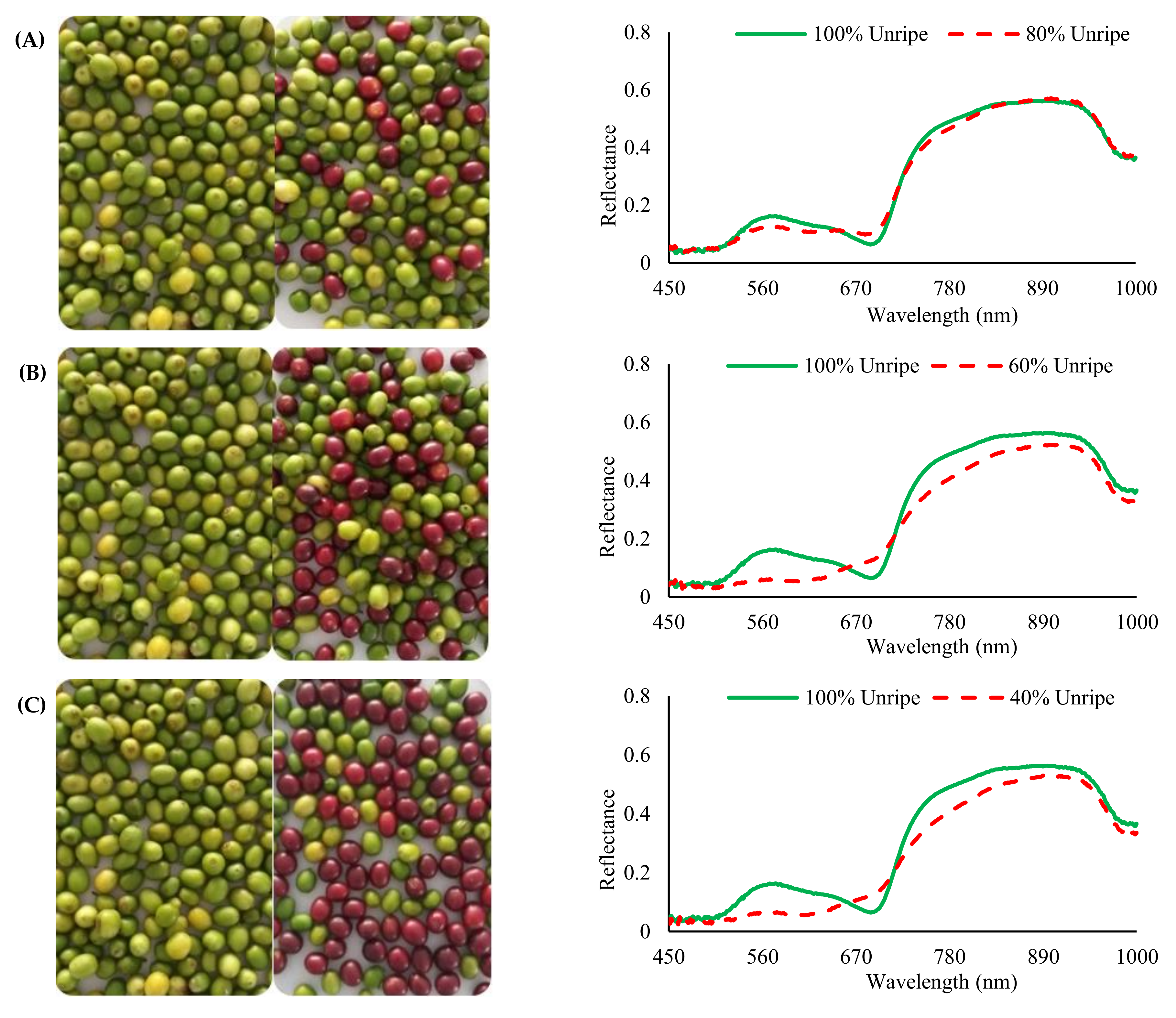
2.4. Laboratory Experiment for Coffee Fruit Ripeness Spectra Characterization
2.5. Extraction of the Vegetation Indices and Field Assessments of the Coffee Ripeness
2.6. Statistical Analysis
3. Results
3.1. Spectral Characterization of Coffee Fruits Ripeness
3.2. Potential of VIs for Discrimination of Coffee Ripeness Classes
3.3. Relationship between VIs and Coffee Ripeness
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- International Coffee Organization (ICO). Historical Data on the Global Coffee Trade; International Coffee Organization (ICO): London, UK, 2020. [Google Scholar]
- USDA. Coffee: World Markets and Trade (Issue June). 2020. Available online: http://apps.fas.usda.gov/psdonline/circulars/coffee.pdf (accessed on 10 September 2020).
- De Assis Silva, S.; de Souza LIMA, J.S.; Alves, A.I. Spatial study of grain yield and percentage of bark of two varieties of Coffea arabica L. to the production of quality coffee. Biosci. J. 2010, 26, 558–565. [Google Scholar]
- Martinez, H.E.P.; Poltronieri, Y.; Farah, A.; Perrone, D. Zinc supplementation, production and quality of coffee beans. Rev. Ceres 2013, 60, 293–299. [Google Scholar] [CrossRef] [Green Version]
- Silva, S.D.A.; De Queiroz, D.M.; Pinto, F.D.A.C.; Santos, N.T. Coffee quality and its relationship with Brix degree and colorimetric information of coffee cherries. Precis. Agric. 2014, 15, 543–554. [Google Scholar] [CrossRef]
- Fagan, E.B.; de Souza, C.H.E.; Pereira, N.M.B.; Machado, V.J. Efeito do tempo de formação do grão de café (Coffea sp.) na qualidade da bebida. Biosci. J. 2011, 27. [Google Scholar]
- De Castro, R.D.; Marraccini, P. Cytology, biochemistry and molecular changes during coffee fruit development. Braz. J. Plant Physiol. 2006, 18, 175–199. [Google Scholar] [CrossRef] [Green Version]
- Aparecido, L.; Rolim, G.D.S.; Moraes, T.; Valeriano, T.T.B.; Lense, G.H.E. Maturation periods for Coffea arabica cultivars and their implications for yield and quality in Brazil. J. Sci. Food Agric. 2018, 98, 3880–3891. [Google Scholar] [CrossRef]
- Herwitz, S.; Johnson, L.; Dunagan, S.; Higgins, R.; Sullivan, D.; Zheng, J.; Lobitz, B.; Leung, J.; Gallmeyer, B.; Aoyagi, M.; et al. Imaging from an unmanned aerial vehicle: Agricultural surveillance and decision support. Comput. Electron. Agric. 2004, 44, 49–61. [Google Scholar] [CrossRef]
- Furfaro, R.; Ganapol, B.; Johnson, L.F.; Herwitz, S.R. Neural Network Algorithm for Coffee Ripeness Evaluation Using Airborne Images. Appl. Eng. Agric. 2007, 23, 379–387. [Google Scholar] [CrossRef]
- Ren, Y.; Meng, Y.; Huang, W.; Ye, H.; Han, Y.; Kong, W.; Zhou, X.; Cui, B.; Xing, N.; Guo, A.; et al. Novel Vegetation Indices for Cotton Boll Opening Status Estimation Using Sentinel-2 Data. Remote. Sens. 2020, 12, 1712. [Google Scholar] [CrossRef]
- Coltri, P.P.; Zullo, J.; do Valle Goncalves, R.R.; Romani, L.A.S.; Pinto, H.S. Coffee Crop’s Biomass and Carbon Stock Estimation With Usage of High-Resolution Satellites Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1786–1795. [Google Scholar] [CrossRef]
- Bernardes, T.; Moreira, M.A.; Adami, M.; Giarolla, A.; Rudorff, B.F.T. Monitoring Biennial Bearing Effect on Coffee Yield Using MODIS Remote Sensing Imagery. Remote Sens. 2012, 4, 2492–2509. [Google Scholar] [CrossRef] [Green Version]
- Nogueira, S.M.C.; Moreira, M.A.; Volpato, M.M.L. Relationship between coffee crop productivity and vegetation indexes derived from oli/landsat-8 sensor data with and without topographic correction. Eng. Agric. 2018, 38, 387–394. [Google Scholar] [CrossRef]
- Tsai, D.-M.; Chen, W.-L. Coffee plantation area recognition in satellite images using Fourier transform. Comput. Electron. Agric. 2017, 135, 115–127. [Google Scholar] [CrossRef]
- Ramirez, G.M.; Zullo, J., Jr. Estimation of biophysical parameters of coffee fields based on high-resolution satellite images. Eng. Agric. 2010, 30, 468–479. [Google Scholar]
- Miranda, J.D.R.; Alves, M.D.C.; Pozza, E.A.; Neto, H.S. Detection of coffee berry necrosis by digital image processing of landsat 8 oli satellite imagery. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 101983. [Google Scholar] [CrossRef]
- Carrijo, G.L.A.; Oliveira, D.E.; De Assis, G.A.; Carneiro, M.G.; Guizilini, V.C.; Souza, J.R. Automatic detection of fruits in coffee crops from aerial images. In Proceedings of the 2017 Latin American Robotics Symposium (LARS) and 2017 Brazilian Symposium on Robotics (SBR), Curitiba, Brazil, 8–11 November 2017; pp. 1–6. [Google Scholar]
- Da Cunha, J.P.A.R.; Neto, M.A.S.; Hurtado, S.M.C. Estimating vegetation volume of coffee crops using images from unmanned aerial vehicles. Eng. Agric. 2019, 39, 41–47. [Google Scholar] [CrossRef]
- Dos Santos, L.M.; Ferraz, G.A.E.S.; Barbosa, B.D.; Diotto, A.V.; Maciel, D.T.; Xavier, L.A.G. Biophysical parameters of coffee crop estimated by UAV RGB images. Precis. Agric. 2020, 21, 1227–1241. [Google Scholar] [CrossRef]
- Santos, L.M.; Ferraz, G.A.S.; Diotto, A.V.; Barbosa, B.D.S.; Maciel, D.T.; Andrade, M.T.; Ferraz, P.F.P.; Rossi, G. Coffee crop coefficient prediction as a function of biophysical variables identified from RGB UAS images. Agron. Res. 2020, 18, 1463–1471. [Google Scholar] [CrossRef]
- Parreiras, T.C.; Lense, G.H.E.; Moreira, R.S.; Santana, D.B.; Mincato, R.L. Using unmanned aerial vehicle and machine learning algorithm to monitor leaf nitrogen in coffee. Coffee Sci. 2020, 15, 1–9. [Google Scholar] [CrossRef]
- Johnson, L.F.; Herwitz, S.; Lobitz, B.M.; Dunagan, S.E. Feasibility of monitoring coffee field ripeness with airborne multispectral imagery. Appl. Eng. Agric. 2004, 20, 845–849. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deeering, D. Monitoring vegetation systems in the Great Plains with ERTS (Earth Resources Technology Satellite). In Proceedings of the Third Earth Resources Technology Satellite-1 Symposium, NASA, Goddard Space Flight Center, Washington, DC, USA, 10–14 December 1973. [Google Scholar]
- Huete, A. A soil-adjusted vegetation index (SAVI). Remote. Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Baloloy, A.B.; Blanco, A.C.; Ana, R.R.C.S.; Nadaoka, K. Development and application of a new mangrove vegetation index (MVI) for rapid and accurate mangrove mapping. ISPRS J. Photogramm. Remote Sens. 2020, 166, 95–117. [Google Scholar] [CrossRef]
- Moreira, M.A.; Adami, M.; Theodor, F. Análise espectral e temporal da cultura do café em imagens Landsat Spectral and temporal behavior analysis of coffee crop in Landsat images. Pesqui. Agropecuária Bras. 2004, 39, 223–231. [Google Scholar] [CrossRef]
- Da Matta, F.M.; Ronchi, C.P.; Maestri, M.; Barros, R.S. Ecophysiology of coffee growth and production. Braz. J. Plant Physiol. 2007, 19, 485–510. [Google Scholar] [CrossRef] [Green Version]
- Alvares, C.A.; Stape, J.L.; Sentelhas, P.C.; Gonçalves, J.L.D.M.; Sparovek, G. Köppen’s climate classification map for Brazil. Meteorol. Z. 2013, 22, 711–728. [Google Scholar] [CrossRef]
- Javan, F.D.; Samadzadegan, F.; Pourazar, S.H.S.; Fazeli, H. UAV-based multispectral imagery for fast Citrus Greening detection. J. Plant Dis. Prot. 2019, 126, 307–318. [Google Scholar] [CrossRef]
- Del Pozo, S.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; Felipe-García, B. Vicarious Radiometric Calibration of a Multispectral Camera on Board an Unmanned Aerial System. Remote Sens. 2014, 6, 1918–1937. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Myint, S.W. A Simplified Empirical Line Method of Radiometric Calibration for Small Unmanned Aircraft Systems-Based Remote Sensing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1876–1885. [Google Scholar] [CrossRef]
- Rosas, J.T.F.; Pinto, F.D.A.D.C.; De Queiroz, D.M.; Villar, F.M.D.M.; Martins, R.N.; Silva, S.D.A. Low-cost system for radiometric calibration of UAV-based multispectral imagery. J. Spat. Sci. 2020, 1–15. [Google Scholar] [CrossRef]
- Brenner, C.; Zeeman, M.; Bernhardt, M.; Schulz, K. Estimation of evapotranspiration of temperate grassland based on high-resolution thermal and visible range imagery from unmanned aerial systems. Int. J. Remote Sens. 2018, 39, 5141–5174. [Google Scholar] [CrossRef] [Green Version]
- Zarco-Tejada, P.J.; Diazvarela, R.; Angileri, V.; Loudjania, P. Tree height quantification using very high-resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Ashapure, A.; Jung, J.; Yeom, J.; Chang, A.; Maeda, M.; Maeda, A.; Landivar, J. A novel framework to detect conventional tillage and no-tillage cropping system effect on cotton growth and development using multi-temporal UAS data. ISPRS J. Photogramm. Remote Sens. 2019, 152, 49–64. [Google Scholar] [CrossRef]
- Wijesingha, J.; Astor, T.; Schulze-Brüninghoff, D.; Wengert, M.; Wachendorf, M. Predicting Forage Quality of Grasslands Using UAV-Borne Imaging Spectroscopy. Remote Sens. 2020, 12, 126. [Google Scholar] [CrossRef] [Green Version]
- QGIS Development Team. QGIS Geographic Information System. Open Source Geospat. Found. Proj. 2016. Available online: http://qgis.osgeo.org (accessed on 10 June 2020).
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.J.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Fitzgerald, G.; Rodriguez, D.; Christensen, L.K.; Belford, R.; Sadras, V.O.; Clarke, T.R. Spectral and thermal sensing for nitrogen and water status in rainfed and irrigated wheat environments. Precis. Agric. 2006, 7, 233–248. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remot. Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Team, R.C. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019. [Google Scholar]
- Maimaitijiang, M.; Sidike, P.; Sidike, P.; Maimaitiyiming, M.; Hartling, S.; Peterson, K.T.; Maw, M.J.; Shakoor, N.; Mockler, T.; Fritschi, F.B. Vegetation Index Weighted Canopy Volume Model (CVMVI) for soybean biomass estimation from Unmanned Aerial System-based RGB imagery. ISPRS J. Photogramm. Remote. Sens. 2019, 151, 27–41. [Google Scholar] [CrossRef]
- He, J.; Zhang, N.; Su, X.; Lu, J.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.; Tian, Y. Estimating Leaf Area Index with a New Vegetation Index Considering the Influence of Rice Panicles. Remote Sens. 2019, 11, 1809. [Google Scholar] [CrossRef] [Green Version]
- Hede, A.N.H.; Kashiwaya, K.; Koike, K.; Sakurai, S. A new vegetation index for detecting vegetation anomalies due to mineral deposits with application to a tropical forest area. Remote Sens. Environ. 2015, 171, 83–97. [Google Scholar] [CrossRef] [Green Version]
- Koide, K.; Koike, K. Applying vegetation indices to detect high water table zones in humid warm-temperate regions using satellite remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2012, 19, 88–103. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Miller, J.R.; Noland, T.L.; Mohammed, G.H.; Sampson, P.H. Scaling-up and model inversion methods with narrowband optical indices for chlorophyll content estimation in closed forest canopies with hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1491–1507. [Google Scholar] [CrossRef] [Green Version]
- Hunt, E.R.; Hively, W.D.; Daughtry, C.S.T.; Mccarty, G.W.; Fujikawa, S.J.; Ng, T.L.; Tranchitella, M.; Linden, D.S.; Yoel, D.W. Remote Sensing of Crop Leaf Area Index Using Unmanned Airborne Vehicles. In Proceedings of the Pecora 17 Conference, American Society for Photogrammetry and Remote Sensing, Denver, Colorado, 18–20 November 2008. [Google Scholar]
- Carneiro, F.M.; Furlani, C.E.A.; Zerbato, C.; De Menezes, P.C.; Gírio, L.A.D.S.; De Oliveira, M.F. Comparison between vegetation indices for detecting spatial and temporal variabilities in soybean crop using canopy sensors. Precis. Agric. 2019, 21, 979–1007. [Google Scholar] [CrossRef]
- Kross, A.; McNairn, H.; Lapen, D.; Sunohara, M.; Champagne, C. Assessment of RapidEye vegetation indices for estimation of leaf area index and biomass in corn and soybean crops. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 235–248. [Google Scholar] [CrossRef] [Green Version]
- Laviola, B.G.; Martinez, H.E.P.; De Souza, R.B.; Salomão, L.C.C.; Cruz, C.D. Macronutrient Accumulation in Coffee Fruits at Brazilian Zona Da Mata Conditions. J. Plant Nutr. 2009, 32, 980–995. [Google Scholar] [CrossRef]
- Ayala-Silva, T.; Beyl, C.A. Changes in spectral reflectance of wheat leaves in response to specific macronutrient deficiency. Adv. Space Res. 2005, 35, 305–317. [Google Scholar] [CrossRef] [PubMed]
- Lin, S.; Li, J.; Liu, Q.; Li, L.; Zhao, J.; Yu, W. Evaluating the Effectiveness of Using Vegetation Indices Based on Red-Edge Reflectance from Sentinel-2 to Estimate Gross Primary Productivity. Remote Sens. 2019, 11, 1303. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Miao, Y.; Zhao, G.; Yuan, F.; Ma, X.; Tan, C.; Yu, W.; Gnyp, M.L.; Lenz-Wiedemann, V.; Rascher, U.; et al. Satellite Remote Sensing-Based In-Season Diagnosis of Rice Nitrogen Status in Northeast China. Remote Sens. 2015, 7, 10646–10667. [Google Scholar] [CrossRef] [Green Version]
- Sonobe, R.; Wang, Q. Hyperspectral indices for quantifying leaf chlorophyll concentrations performed differently with different leaf types in deciduous forests. Ecol. Inform. 2017, 37, 1–9. [Google Scholar] [CrossRef]
- Mamaghani, B.; Connal, R.; Hartzell, R.; Kha, K.; Sasaki, G.; Marcellus, E.; Knappen, J.; Bauch, T.; Raqueno, N.; Salvaggio, C. An initial exploration of vicarious and in-scene calibration techniques for small unmanned aircraft systems. Auton. Air Ground Sens. Syst. Agric. Optim. Phenotyping III 2018, 10664, 1066406. [Google Scholar] [CrossRef]
- Mamaghani, B.; Salvaggio, C. Multispectral Sensor Calibration and Characterization for sUAS Remote Sensing. Sensors 2019, 19, 4453. [Google Scholar] [CrossRef] [Green Version]
- Iqbal, F.; Lucieer, A.; Barry, K. Simplified radiometric calibration for UAS-mounted multispectral sensor. Eur. J. Remote Sens. 2018, 51, 301–313. [Google Scholar] [CrossRef]
- Lule, T.; Benthien, S.; Keller, H.; Mutze, F.; Rieve, P.; Seibel, K.; Sommer, M.; Bohm, M. Sensitivity of CMOS based imagers and scaling perspectives. IEEE Trans. Electron Devices 2000, 47, 2110–2122. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera | RedEdge MX | Phantom 4 RGB |
|---|---|---|
| Acquisition | RGB–RE–NIR | R–G–B |
| Sensor size (mm) | 4.8 × 3.6 | 4.7 × 6.3 |
| Sensor size (px) | 1280 × 960 | 5472 × 3648 |
| Focal length (mm) | 5.4 | 8.8 |
| Field of View (FOV) | 47.2° | 84° |
| Output format | RAW, TIF image | RAW, JPG image |
| Date | AGL (m) 1 | Overlap (%) 2 | Spatial Resolution (cm) |
|---|---|---|---|
| 29/04/2019 | 60 | −/75 3 | −/2.3 |
| 07/05/2019 | 60 | −/75 | −/2.3 |
| 13/05/2019 | 60 | 80/75 | 5.0/2.3 |
| 27/05/2019 | 60 | 80/75 | 5.0/2.3 |
| Vegetation Index | Equation | Reference |
|---|---|---|
| CRI | Proposed VI | |
| GRRI | [23] | |
| MCARI1 | [39] | |
| NDVI | [24] | |
| NDRE | [40] | |
| GNDVI | [41] |
| Field | Area (ha) | Cultivar | Canopy Volume (m3) | Density (Plants ha−1) | Average Slope (%) | Yield (kg ha−1) |
|---|---|---|---|---|---|---|
| A | 0.54 | Red Catuai | 2.91 ± 0.19 | 4000 | 7.66 | 1220 |
| B | 2.1 | Red Catuai | 1.87 ± 0.14 | 4000 | 14.39 | 480 |
| C | 1.01 | MG H 419-1 | 0.62 ± 0.04 | 8000 | 16.24 | 3750 |
| D | 0.77 | Red Bourbon | 0.70 ± 0.06 | 13,333 | 23.76 | 2500 |
| E | 0.65 | Icatu | 1.77 ± 0.10 | 2222 | 20.79 | 2220 |
| MicaSense RedEdge MX | ||||||||||
| Field | n | Class | CRI | p-Value | GRRI | p-Value | MCARI1 | p-Value | NDVI | p-Value |
| A | 13 | G ± SD | 5.680 ± 0.867 | 0.000 *** | 3.213 ± 0.529 | 0.011 * | 0.450 ± 0.069 | 0.000 *** | 0.823 ± 0.014 | 0.772 ns |
| 07 | R ± SD | 8.746 ± 0.774 | 2.621 ± 0.200 | 0.613 ± 0.038 | 0.821 ± 0.018 | |||||
| B | 27 | G ± SD | 6.509 ± 1.193 | 0.000 *** | 3.246 ± 0.255 | 0.000 *** | 0.480 ± 0.044 | 0.000 *** | 0.821 ± 0.017 | 0.067 ns |
| 15 | R ± SD | 8.353 ± 1.519 | 2.924 ± 0.159 | 0.579 ± 0.057 | 0.810 ± 0.018 | |||||
| C | 25 | G ± SD | 6.740 ± 0.922 | 0.000 *** | 3.034 ± 0.295 | 0.257 ns | 0.493 ± 0.075 | 0.000 *** | 0.812 ± 0.022 | 0.891 ns |
| 12 | R ± SD | 9.174 ± 0.834 | 2.912 ± 0.310 | 0.609 ± 0.029 | 0.811 ± 0.201 | |||||
| D | 18 | G ± SD | 6.354 ± 1.343 | 0.000 *** | 3.178 ± 0.311 | 0.121 ns | 0.474 ± 0.139 | 0.000 *** | 0.847 ± 0.011 | 0.017 * |
| 12 | R ± SD | 9.727 ± 0.468 | 2.988 ± 0.202 | 0.725 ± 0.064 | 0.835 ± 0.010 | |||||
| E | 20 | G ± SD | 5.910 ± 0.931 | 0.000 *** | 3.006 ± 0.254 | 0.005 ** | 0.396 ± 0.069 | 0.000 *** | 0.803 ± 0.010 | 0.016 * |
| 08 | R ± SD | 9.094 ± 0.544 | 2.723 ± 0.111 | 0.521 ± 0.067 | 0.792 ± 0.009 | |||||
| Phantom 4 Pro RGB Camera | MicaSense RedEdge MX | |||||||||
| Field | n | Class | CRI | p-Value | GRRI | p-Value | NDRE | p-Value | GNDVI | p-Value |
| A | 26 | G ± SD | 7.090 ± 1.535 | 0.000 *** | 1.332 ± 0.227 | 0.019 * | 0.556 ± 0.020 | 0.000 *** | 0.847 ± 0.005 | 0.069 ns |
| 11 | R ± SD | 9.880 ± 1.292 | 1.132 ± 0.048 | 0.513 ± 0.021 | 0.841 ± 0.006 | |||||
| B | 61 | G ± SD | 7.118 ± 1.450 | 0.001 ** | 1.284 ± 0.193 | 0.005 ** | 0.549 ± 0.023 | 0.002 ** | 0.843 ± 0.011 | 0.041 * |
| 19 | R ± SD | 8.460 ± 1.006 | 1.140 ± 0.047 | 0.520 ± 0.030 | 0.835 ± 0.010 | |||||
| C | 48 | G ± SD | 6.075 ± 1.392 | 0.000 *** | 1.255 ± 0.221 | 0.014 * | 0.555 ± 0.022 | 0.097 ns | 0.845 ± 0.014 | 0.097 ns |
| 16 | R ± SD | 8.190 ± 0.926 | 1.084 ± 0.046 | 0.541 ± 0.026 | 0.837 ± 0.008 | |||||
| D | 45 | G ± SD | 6.998 ± 1.613 | 0.004 ** | 1.202 ± 0.215 | 0.000 *** | 0.547 ± 0.010 | 0.000 *** | 0.848 ± 0.007 | 0.053 ns |
| 11 | R ± SD | 8.744 ± 0.632 | 0.915 ± 0.074 | 0.530 ± 0.006 | 0.839 ± 0.012 | |||||
| E | 44 | G ± SD | 6.831 ± 0.958 | 0.000 *** | 1.184 ± 0.134 | 0.001 ** | 0.526 ± 0.028 | 0.022 * | 0.832 ± 0.010 | 0.165 ns |
| 08 | R ± SD | 8.171 ± 0.257 | 1.007 ± 0.135 | 0.501 ± 0.015 | 0.826 ± 0.011 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nogueira Martins, R.; de Carvalho Pinto, F.d.A.; Marçal de Queiroz, D.; Magalhães Valente, D.S.; Fim Rosas, J.T. A Novel Vegetation Index for Coffee Ripeness Monitoring Using Aerial Imagery. Remote Sens. 2021, 13, 263. https://doi.org/10.3390/rs13020263
Nogueira Martins R, de Carvalho Pinto FdA, Marçal de Queiroz D, Magalhães Valente DS, Fim Rosas JT. A Novel Vegetation Index for Coffee Ripeness Monitoring Using Aerial Imagery. Remote Sensing. 2021; 13(2):263. https://doi.org/10.3390/rs13020263
Chicago/Turabian StyleNogueira Martins, Rodrigo, Francisco de Assis de Carvalho Pinto, Daniel Marçal de Queiroz, Domingos Sárvio Magalhães Valente, and Jorge Tadeu Fim Rosas. 2021. "A Novel Vegetation Index for Coffee Ripeness Monitoring Using Aerial Imagery" Remote Sensing 13, no. 2: 263. https://doi.org/10.3390/rs13020263
APA StyleNogueira Martins, R., de Carvalho Pinto, F. d. A., Marçal de Queiroz, D., Magalhães Valente, D. S., & Fim Rosas, J. T. (2021). A Novel Vegetation Index for Coffee Ripeness Monitoring Using Aerial Imagery. Remote Sensing, 13(2), 263. https://doi.org/10.3390/rs13020263