
SAR-Based Flood Monitoring for Flatland with Frequently Fluctuating Water Surfaces: Proposal for the Normalized Backscatter Amplitude Difference Index (NoBADI)


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
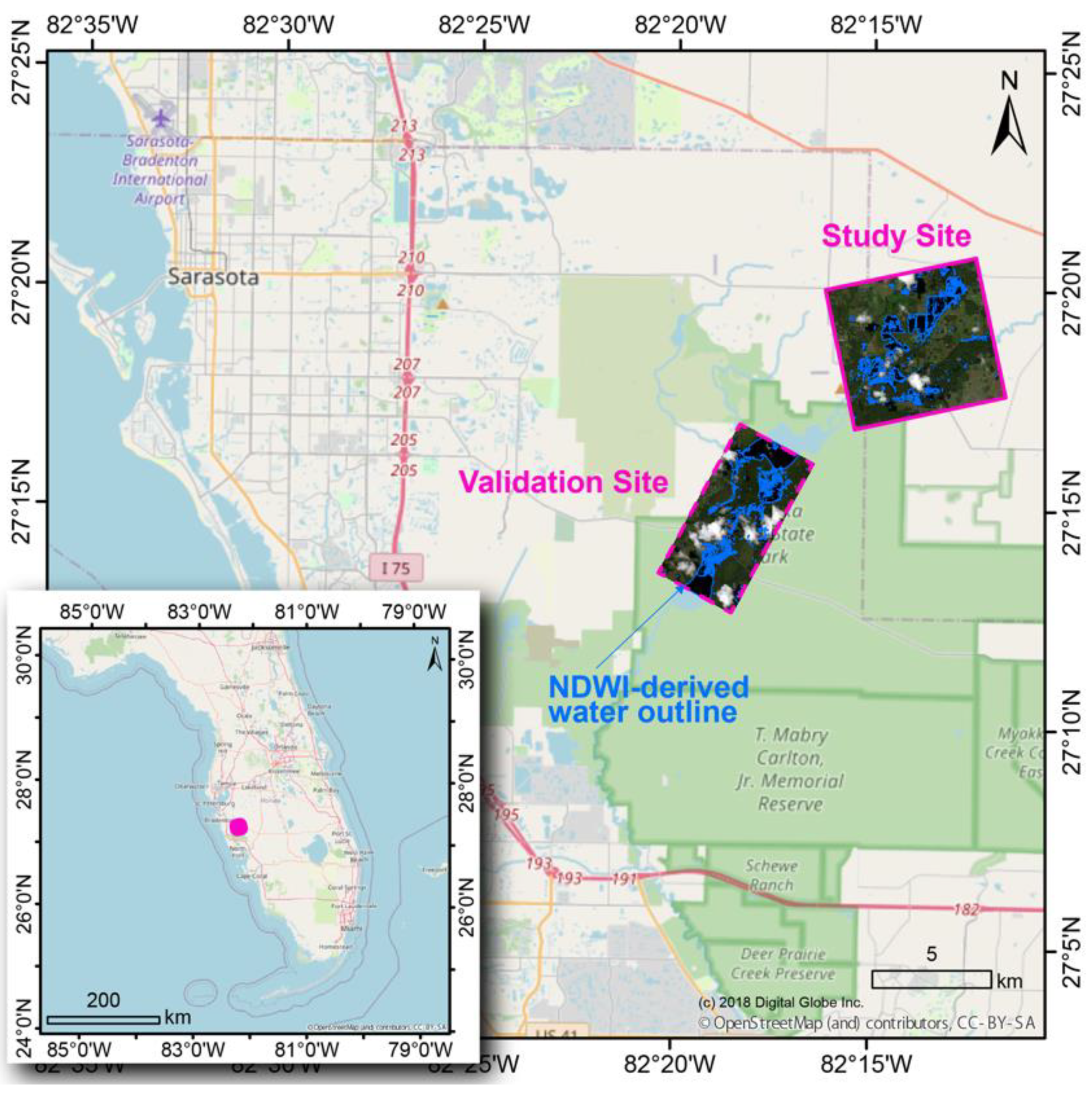
2. Study Site
3. Data
3.1. Reference Optical Imagery
3.2. SAR Data
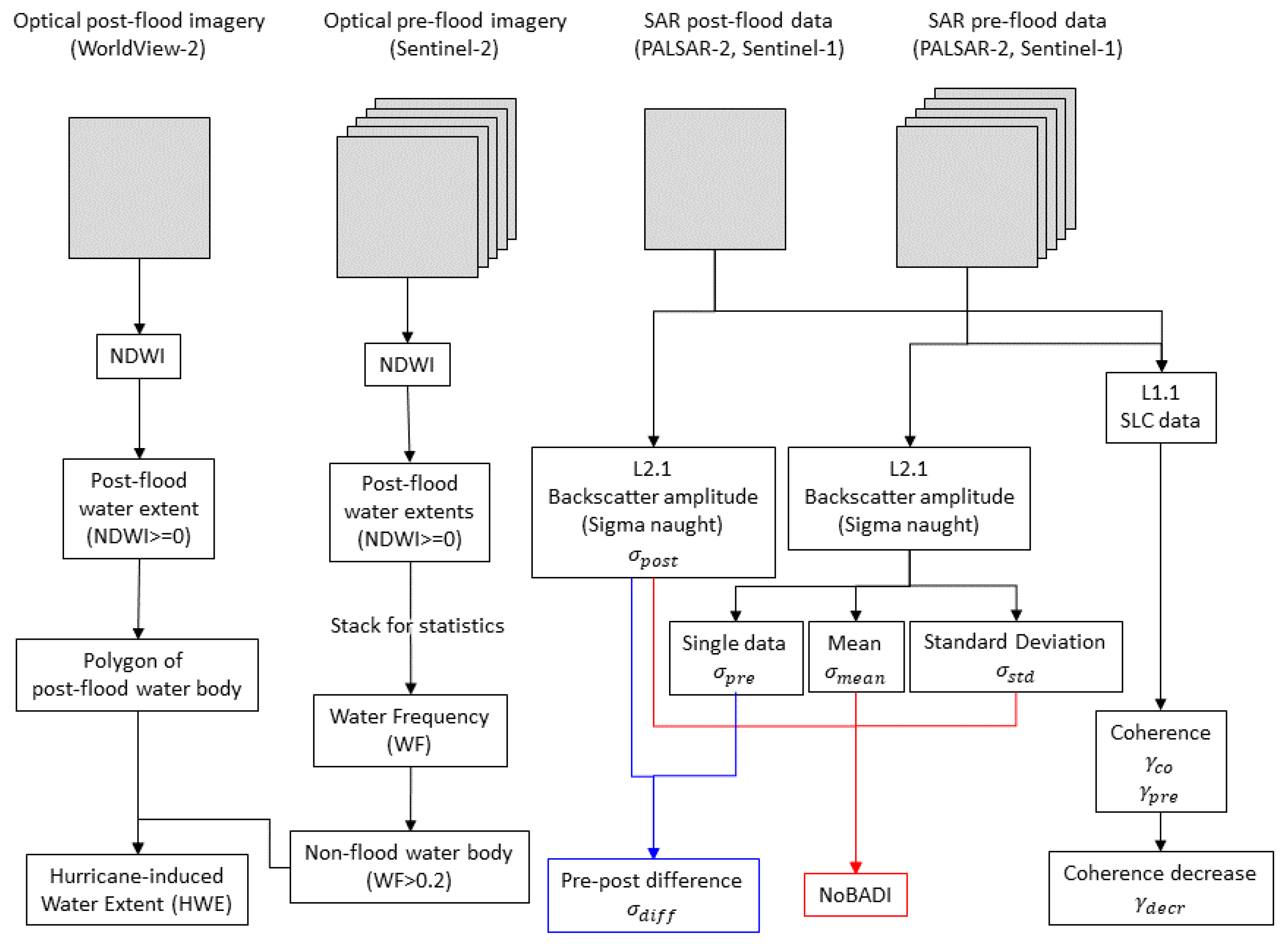
4. Methodology
4.1. Water Surface during the Flood
4.2. Water Surface Not/Highly Related to the Flood
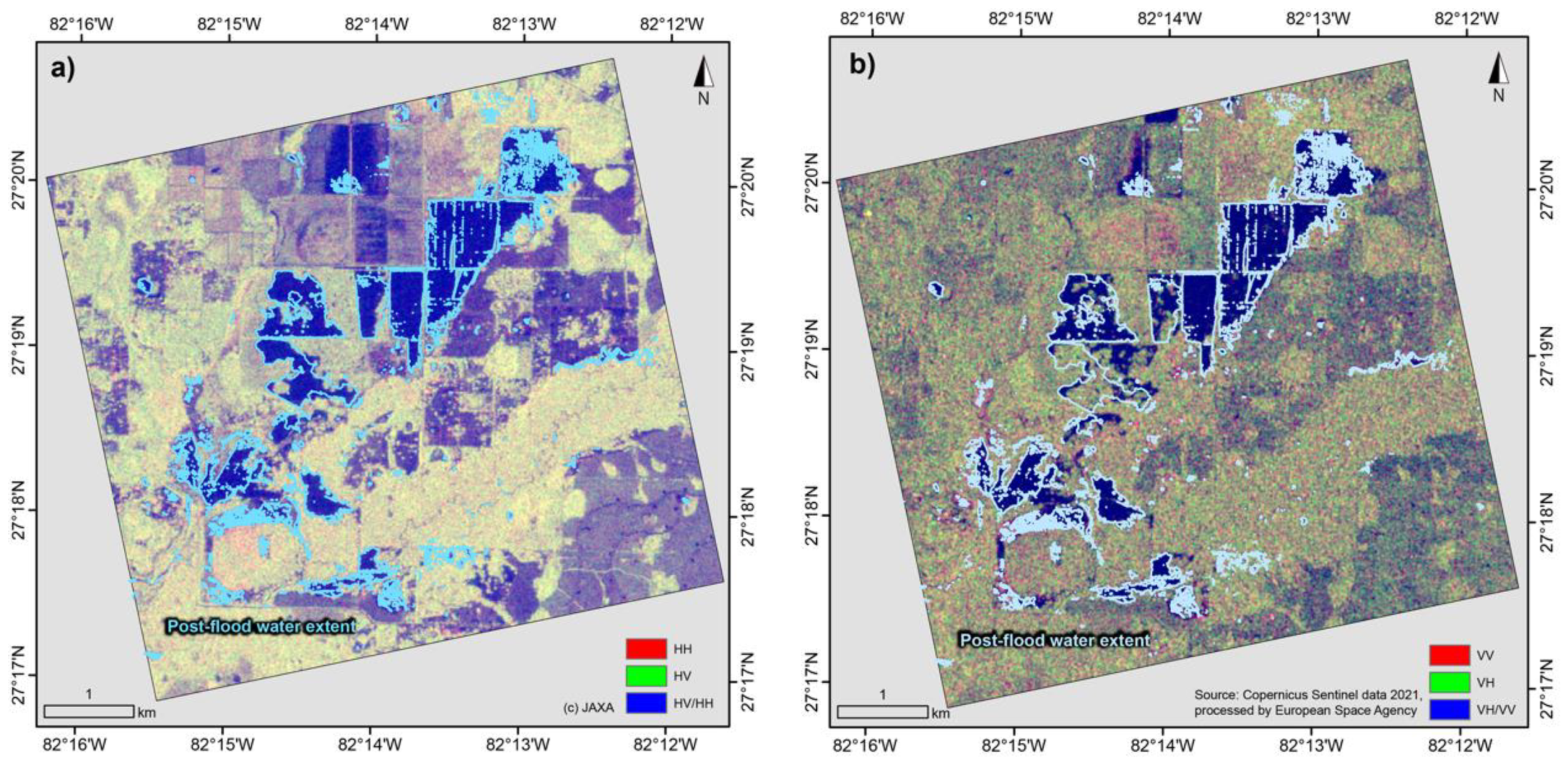
4.3. L-Band SAR Processing
4.4. C-Band SAR Processing
5. Results
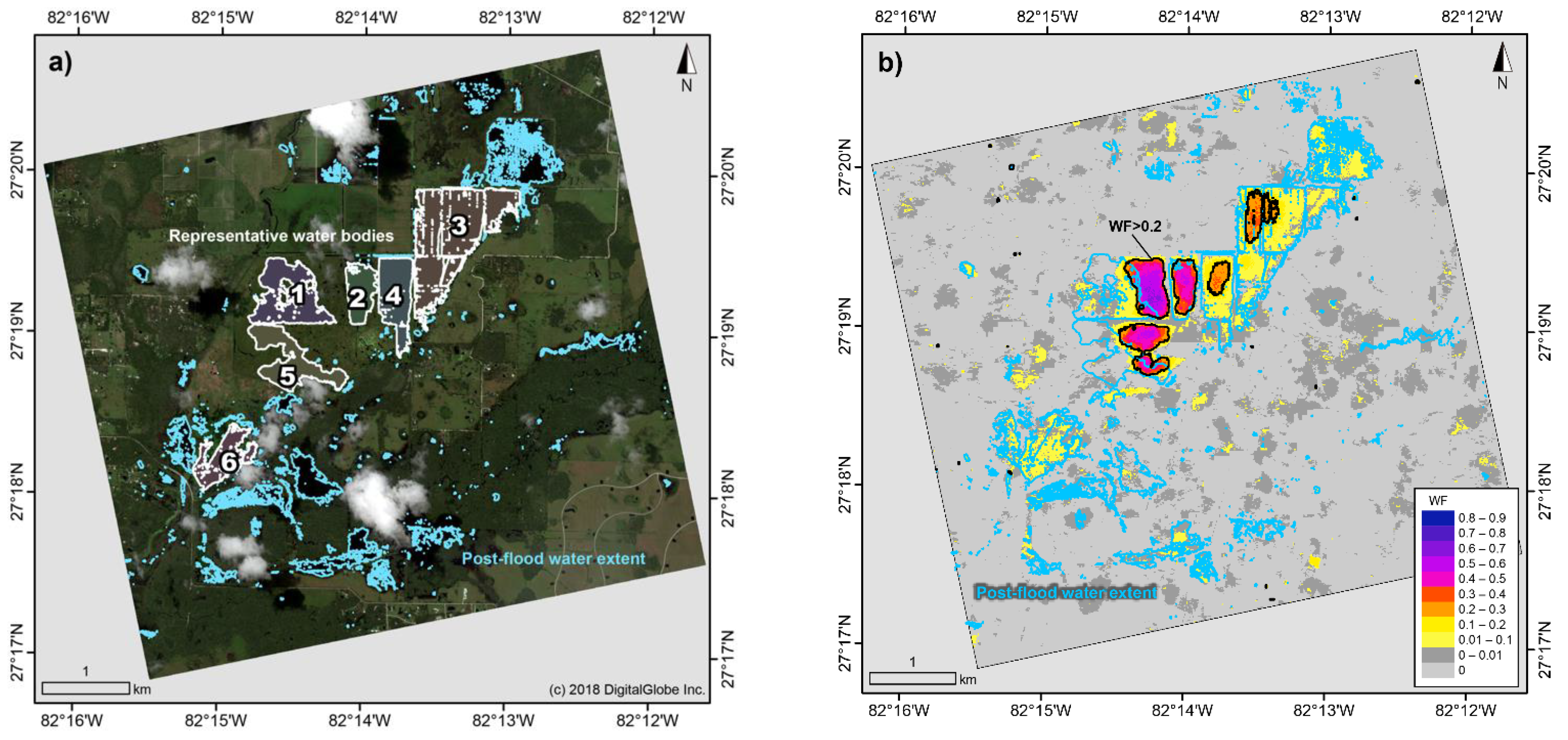
5.1. Optical Water Mapping for Reference
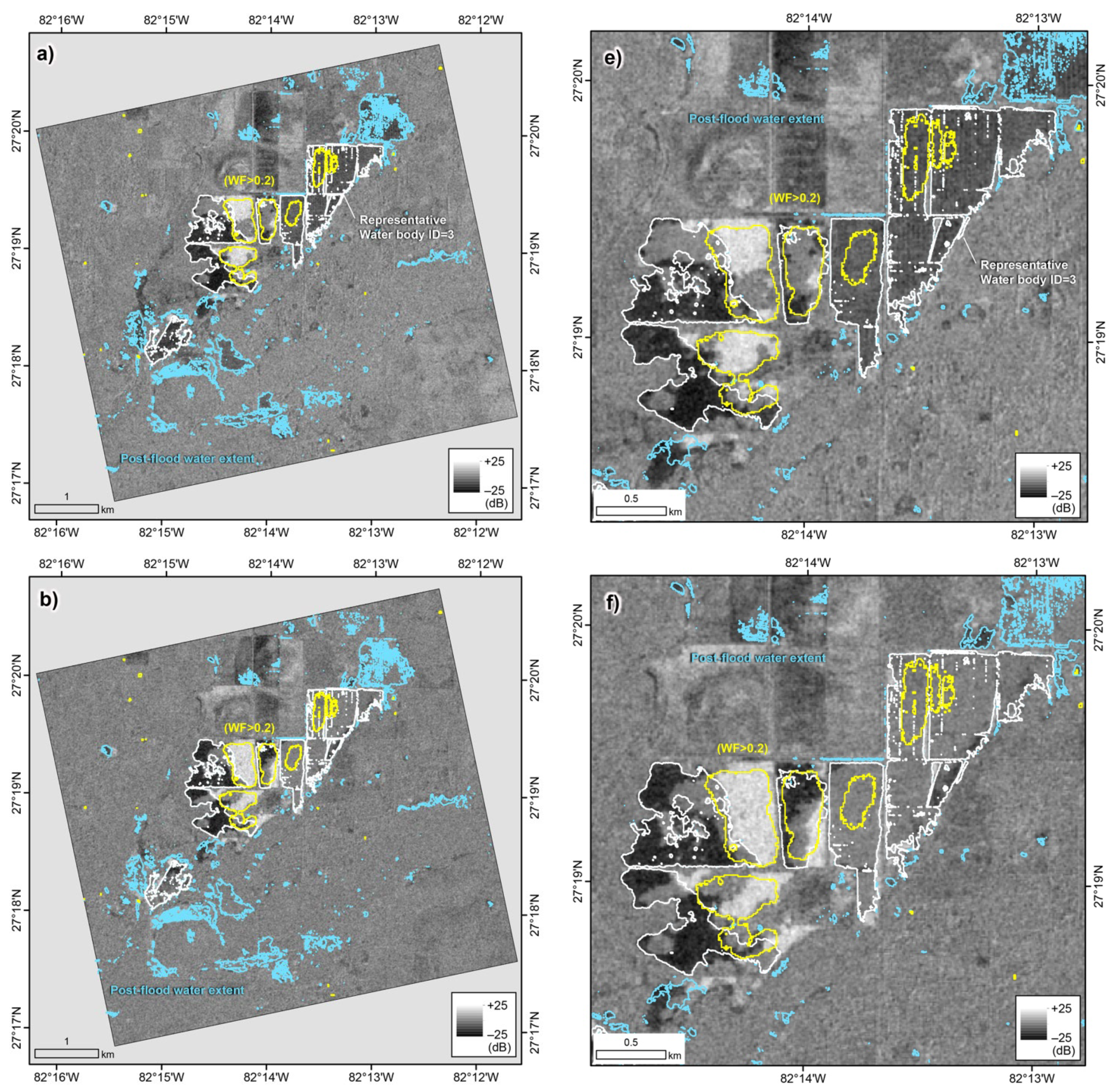
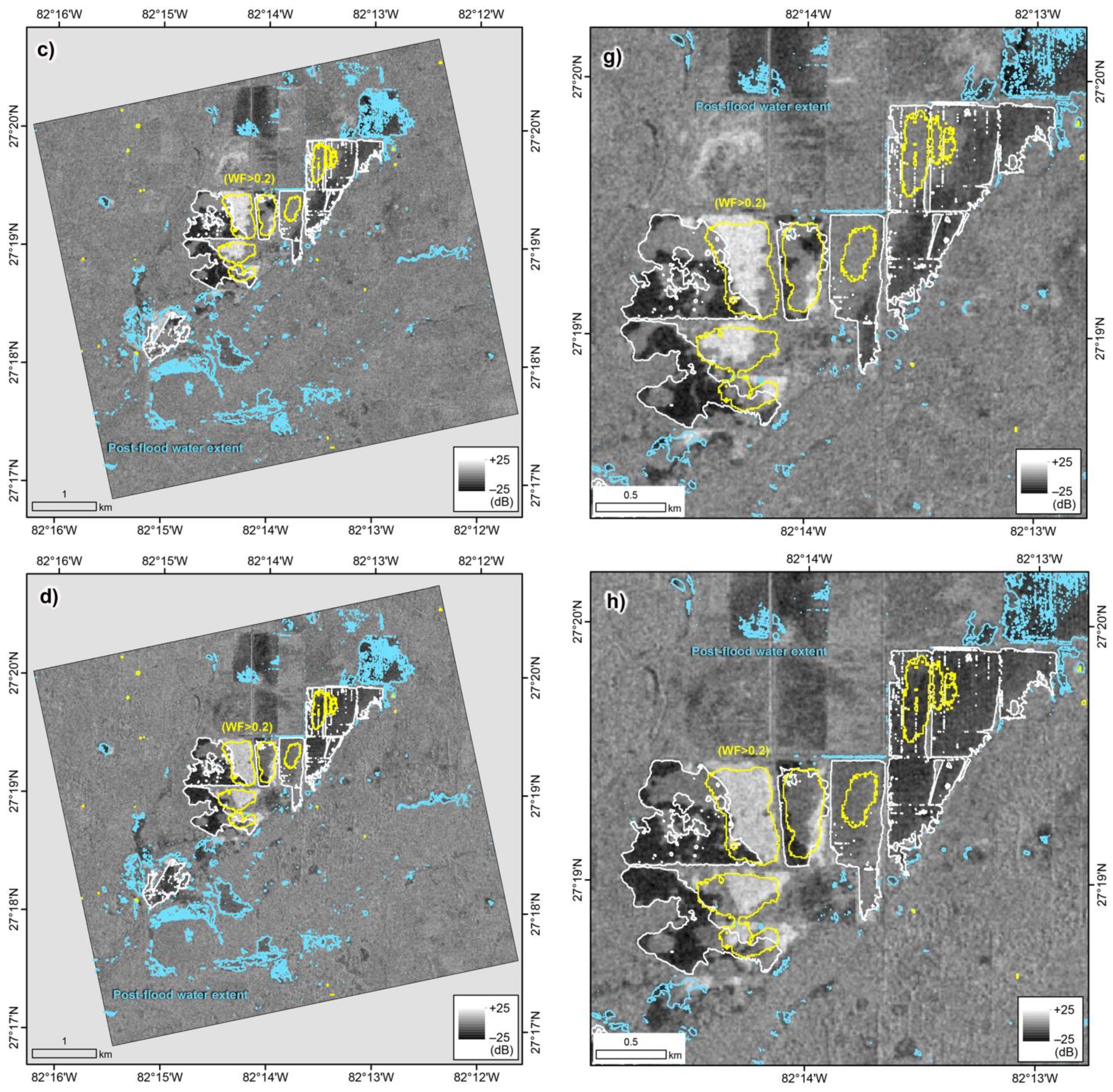
5.2. Single Post-Flood SAR Imagery
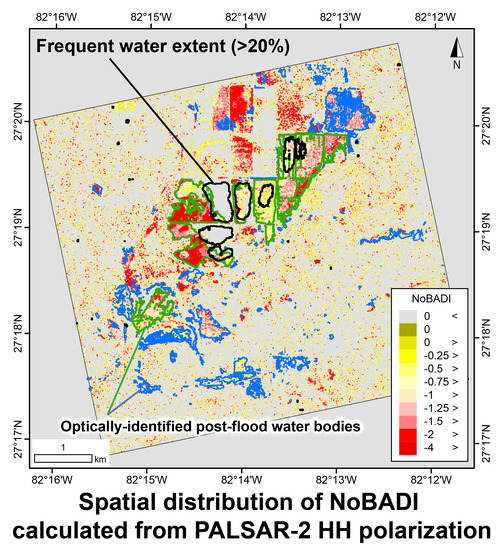
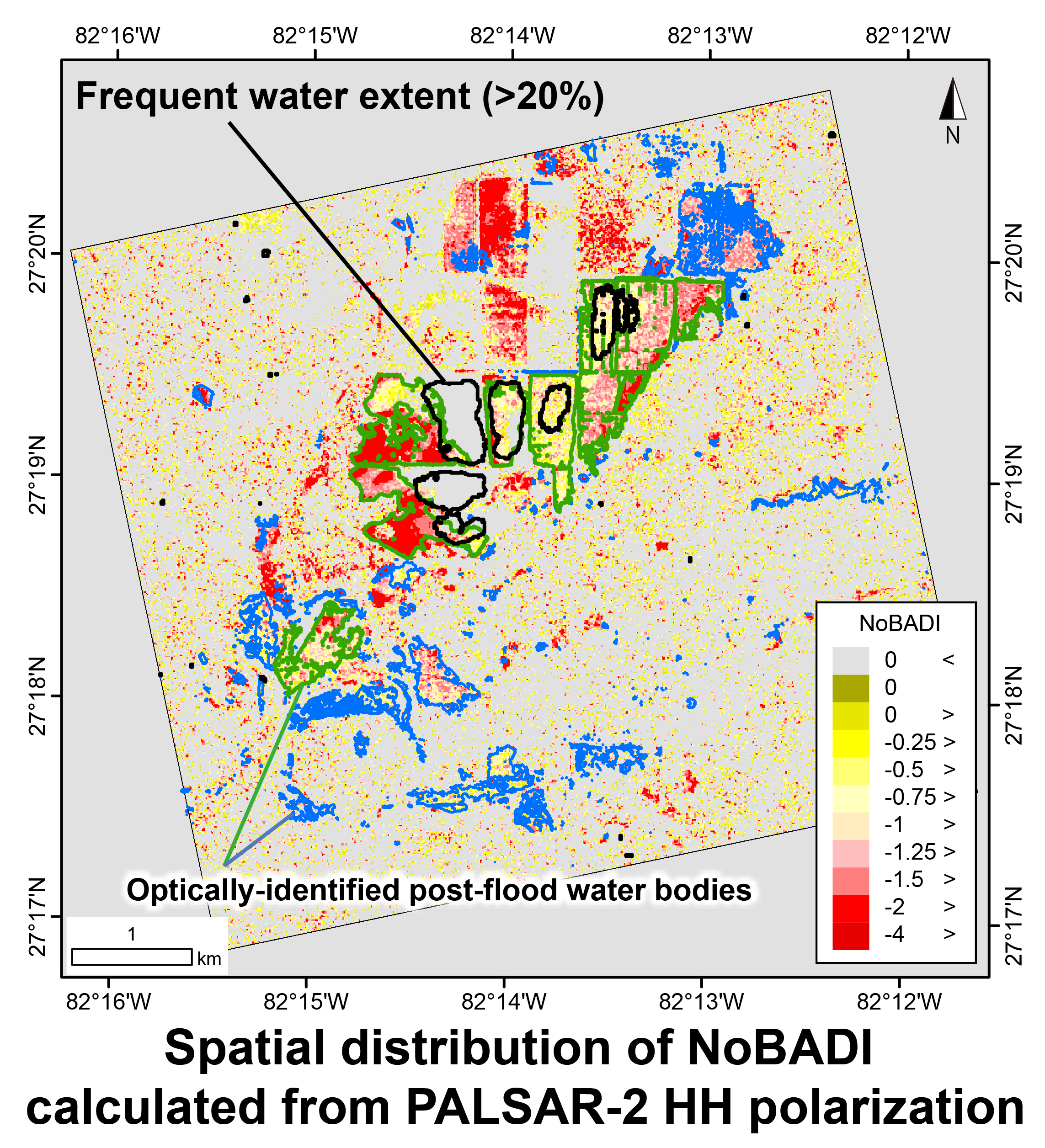
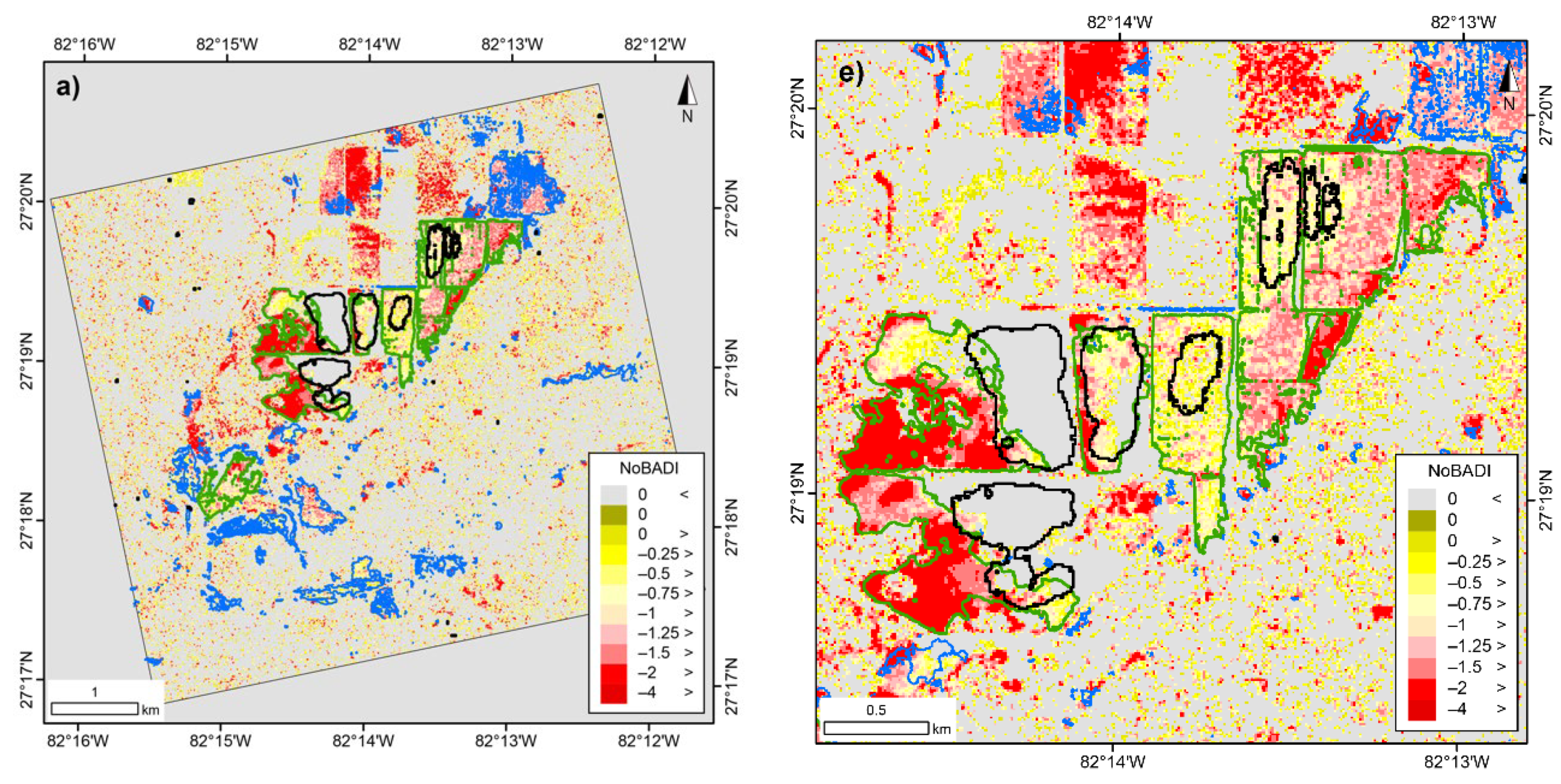
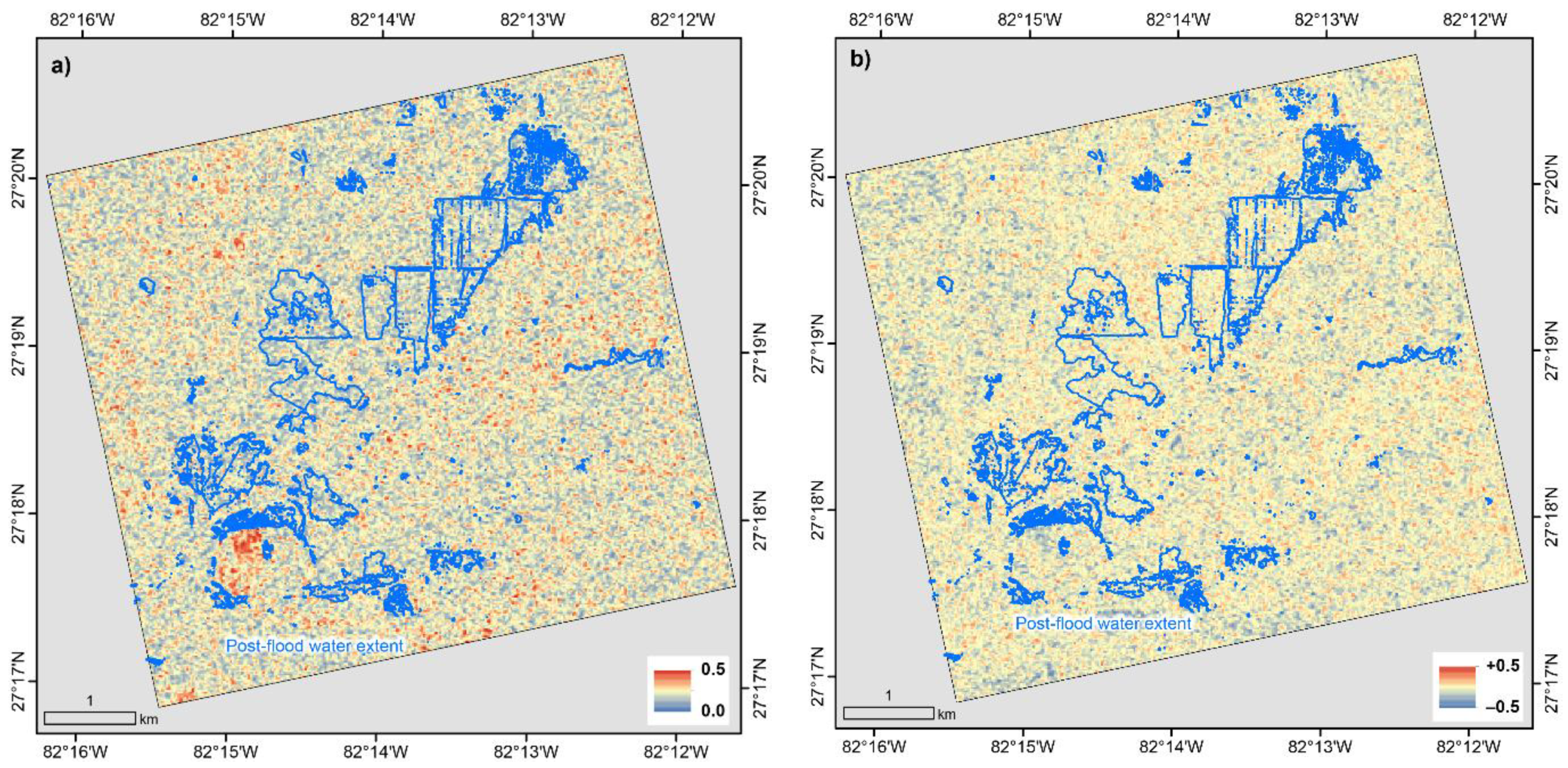
5.3. NoBADI
5.4. Pre–Post Difference
5.5. Coherence
6. Discussion
6.1. Overview of NoBADI
6.2. SAR Backscatter Amplitude and Water Extent
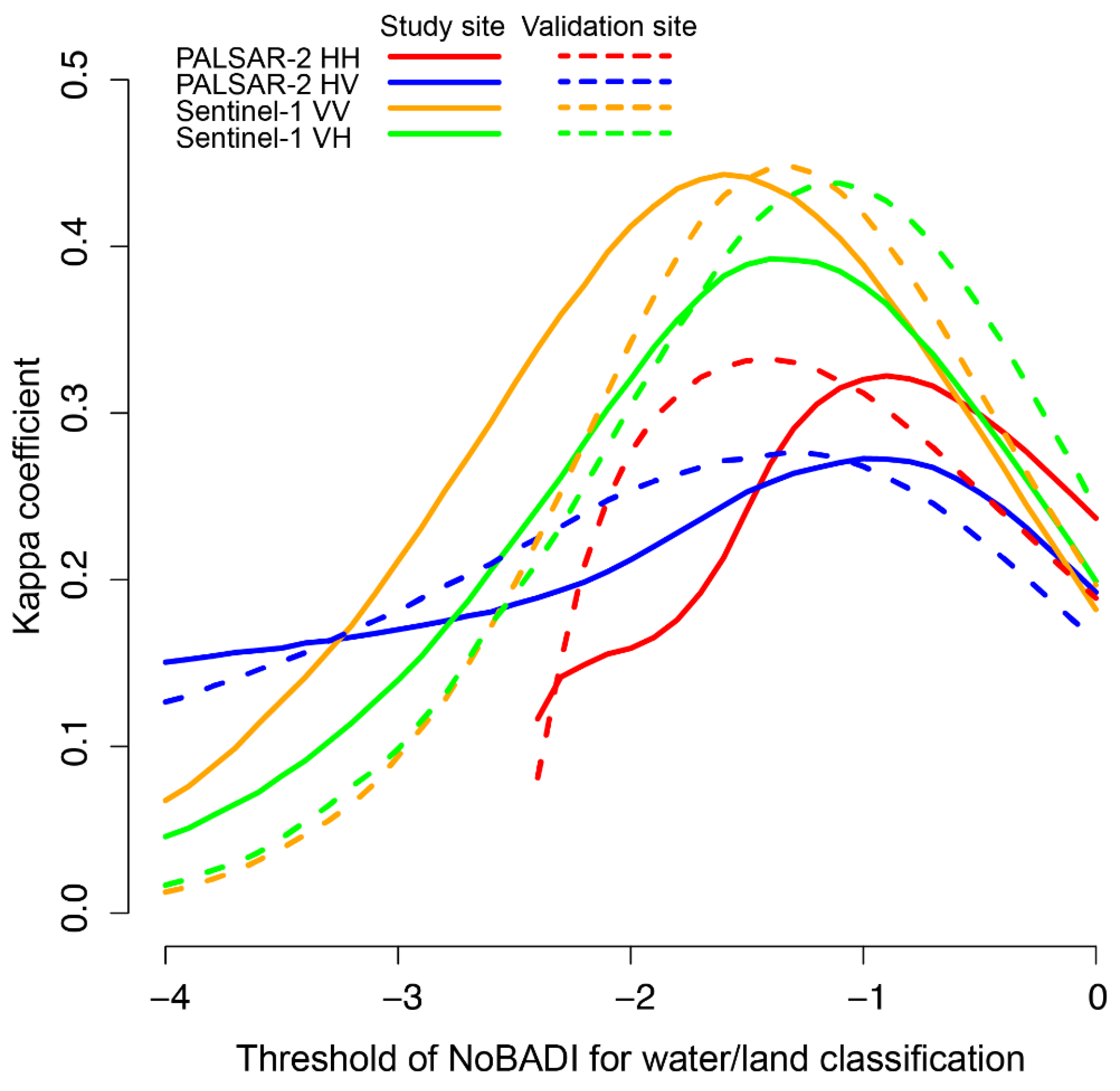
6.3. Optimization of Threshold Value for NoBADI Water Extraction
6.4. Advantages of NoBADI
6.5. Toward Operational Use of Crisis Response
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Agnihotri, A.K.; Ohri, A.; Gaur, S.; Shivam; Das, N.; Mishra, S. Flood inundation mapping and monitoring using SAR data and its impact on Ramganga River in Ganga basin. Environ. Monit. Assess. 2019, 191, 760. [Google Scholar] [CrossRef] [PubMed]
- Bayik, C.; Abdikan, S.; Ozbulak, G.; Alasag, T.; Aydemir, S.; Sanli, F.B. Exploiting multi-temporal Sentinel-1 SAR data for flood extend mapping. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives, Istanbul, Turkey, 18–21 March 2018; Volume 42. [Google Scholar]
- Sanyal, J.; Lu, X.X. Application of Remote Sensing in Flood Management with Special Reference to Monsoon Asia: A Review. Nat. Hazards 2004, 283–301. [Google Scholar] [CrossRef]
- Long, S.; Fatoyinbo, T.E.; Policelli, F. Flood extent mapping for Namibia using change detection and thresholding with SAR. Environ. Res. Lett. 2014, 9, 035002. [Google Scholar] [CrossRef]
- Meyer, F.J.; Ajadi, O.A.; Schultz, L.; Bell, J.; Arnoult, K.M.; Gens, R.; Nicoll, J.B. An automatic flood monitoring service from Sentinel-1 SAR: Products, delivery pipelines, and performance assessment. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 6576–6579. [Google Scholar] [CrossRef]
- Meyer, F.J.; Ajadi, O.A.; Schultz, L.; Bell, J.; Arnoult, K.M.; Gens, R.; Molthan, A.L.; Nicoll, J.B.; Hogenson, K. Applications of a SAR-based flood monitoring service during disaster response and recovery. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 4649–4652. [Google Scholar]
- Watanabe, M.; Koyama, C.N.; Hayashi, M.; Nagatani, I.; Tadono, T.; Shimada, M. Refined algorithm for forest early warning system with ALOS-2/PALSAR-2 ScanSAR data in tropical forest regions. Remote Sens. Environ. 2021, 265, 112643. [Google Scholar] [CrossRef]
- Florida State University Florida Climate Center. Available online: https://climatecenter.fsu.edu/ (accessed on 31 January 2021).
- Cangialosi, J.P.; Latto, A.S.; Berg, R. National Hurricane Center Tropical Cyclone Report: Hurricane Irma (30 August–12 September 2017); NOAA National Centers for Environmental Information: Asheville, NC, USA, 2018. [Google Scholar]
- National Aeronautics and Oceanic Administration BULLETIN—Hurricane Irma Intermediate Advisory Number 45A. Available online: https://www.capeweather.com/weather-ftopicp-27027.html (accessed on 31 August 2021).
- Chakalian, P.M.; Kurtz, L.C.; Hondula, D.M. After the Lights Go Out: Household Resilience to Electrical Grid Failure Following Hurricane Irma. Nat. Hazards Rev. 2019, 20, 05019001. [Google Scholar] [CrossRef]
- Mitsova, D.; Esnard, A.M.; Sapat, A.; Lai, B.S. Socioeconomic vulnerability and electric power restoration timelines in Florida: The case of Hurricane Irma. Nat. Hazards 2018, 94, 689–709. [Google Scholar] [CrossRef]
- Feng, K.; Lin, N. Reconstructing and analyzing the traffic flow during evacuation in Hurricane Irma (2017). Transp. Res. Part D Transp. Environ. 2021, 94, 102788. [Google Scholar] [CrossRef]
- Issa, A.; Ramadugu, K.; Mulay, P.; Hamilton, J.; Siegel, V.; Harrison, C.; Campbell, C.M.; Blackmore, C.; Bayleyegn, T.; Boehmer, T. Deaths Related to Hurricane Irma—Florida, Georgia, and North Carolina, September 4–October 10, 2017. MMWR. Morb. Mortal. Wkly. Rep. 2018, 67, 829–832. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- MAXAR Technologies WorldView-2 Datasheet. Available online: https://resources.maxar.com/data-sheets/worldview-2 (accessed on 31 August 2021).
- European Space Agency Sentinel-2 MSI User Guide. Available online: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-2-msi (accessed on 31 August 2021).
- Updike, T.; Comp, C. Radiometric Use of WorldView-2 Imagery Technical Note; DigitalGlobe: Westminster, CO, USA, 2010; pp. 1–17. [Google Scholar]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Uddin, K.; Matin, M.A.; Meyer, F.J. Operational flood mapping using multi-temporal Sentinel-1 SAR images: A case study from Bangladesh. Remote Sens. 2019, 11, 1581. [Google Scholar] [CrossRef] [Green Version]
- Martinis, S.; Rieke, C. Backscatter analysis using multi-temporal and multi-frequency SAR data in the context of flood mapping at River Saale, Germany. Remote Sens. 2015, 7, 7732–7752. [Google Scholar] [CrossRef] [Green Version]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nagai, H.; Abe, T.; Ohki, M. SAR-Based Flood Monitoring for Flatland with Frequently Fluctuating Water Surfaces: Proposal for the Normalized Backscatter Amplitude Difference Index (NoBADI). Remote Sens. 2021, 13, 4136. https://doi.org/10.3390/rs13204136
Nagai H, Abe T, Ohki M. SAR-Based Flood Monitoring for Flatland with Frequently Fluctuating Water Surfaces: Proposal for the Normalized Backscatter Amplitude Difference Index (NoBADI). Remote Sensing. 2021; 13(20):4136. https://doi.org/10.3390/rs13204136
Chicago/Turabian StyleNagai, Hiroto, Takahiro Abe, and Masato Ohki. 2021. "SAR-Based Flood Monitoring for Flatland with Frequently Fluctuating Water Surfaces: Proposal for the Normalized Backscatter Amplitude Difference Index (NoBADI)" Remote Sensing 13, no. 20: 4136. https://doi.org/10.3390/rs13204136
APA StyleNagai, H., Abe, T., & Ohki, M. (2021). SAR-Based Flood Monitoring for Flatland with Frequently Fluctuating Water Surfaces: Proposal for the Normalized Backscatter Amplitude Difference Index (NoBADI). Remote Sensing, 13(20), 4136. https://doi.org/10.3390/rs13204136