
Improved Filtering of ICESat-2 Lidar Data for Nearshore Bathymetry Estimation Using Sentinel-2 Imagery


Abstract
:
1. Introduction
2. Study Areas and Data Sources
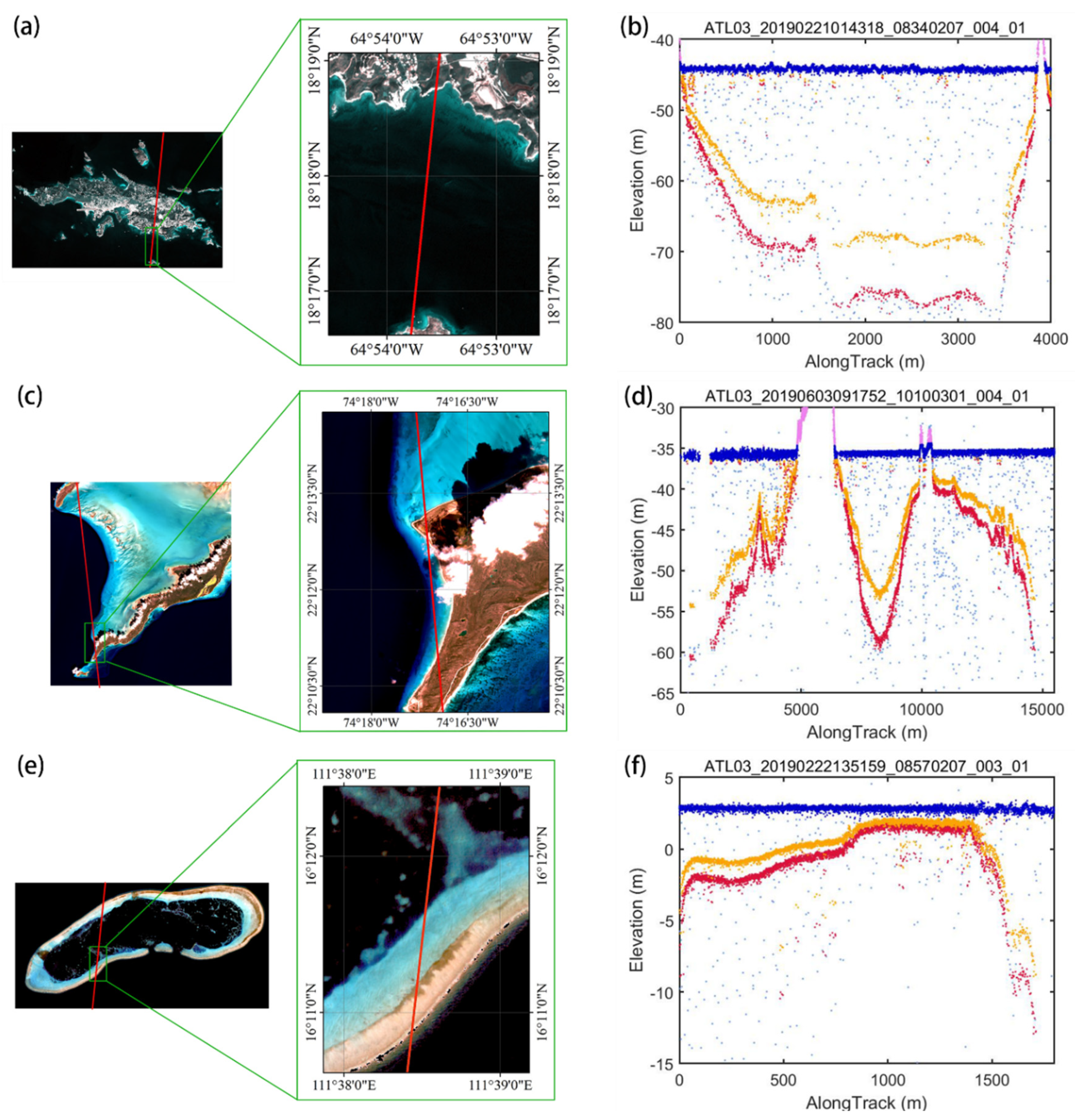
2.1. Study Areas
2.2. ICESat-2 Lidar Datasets
2.3. Sentinel-2 Satellite Imagery
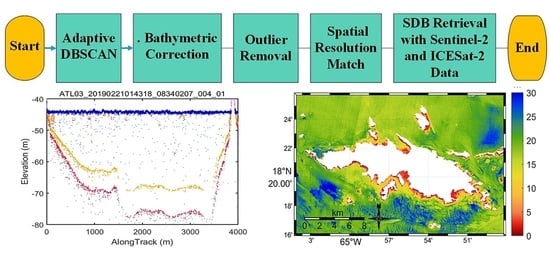
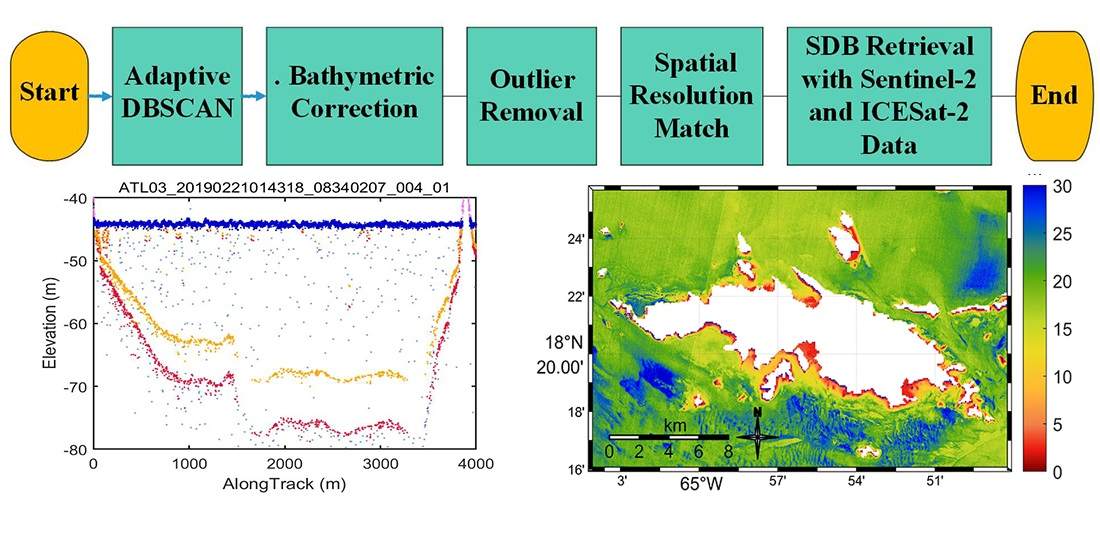
3. SDB-AP Method
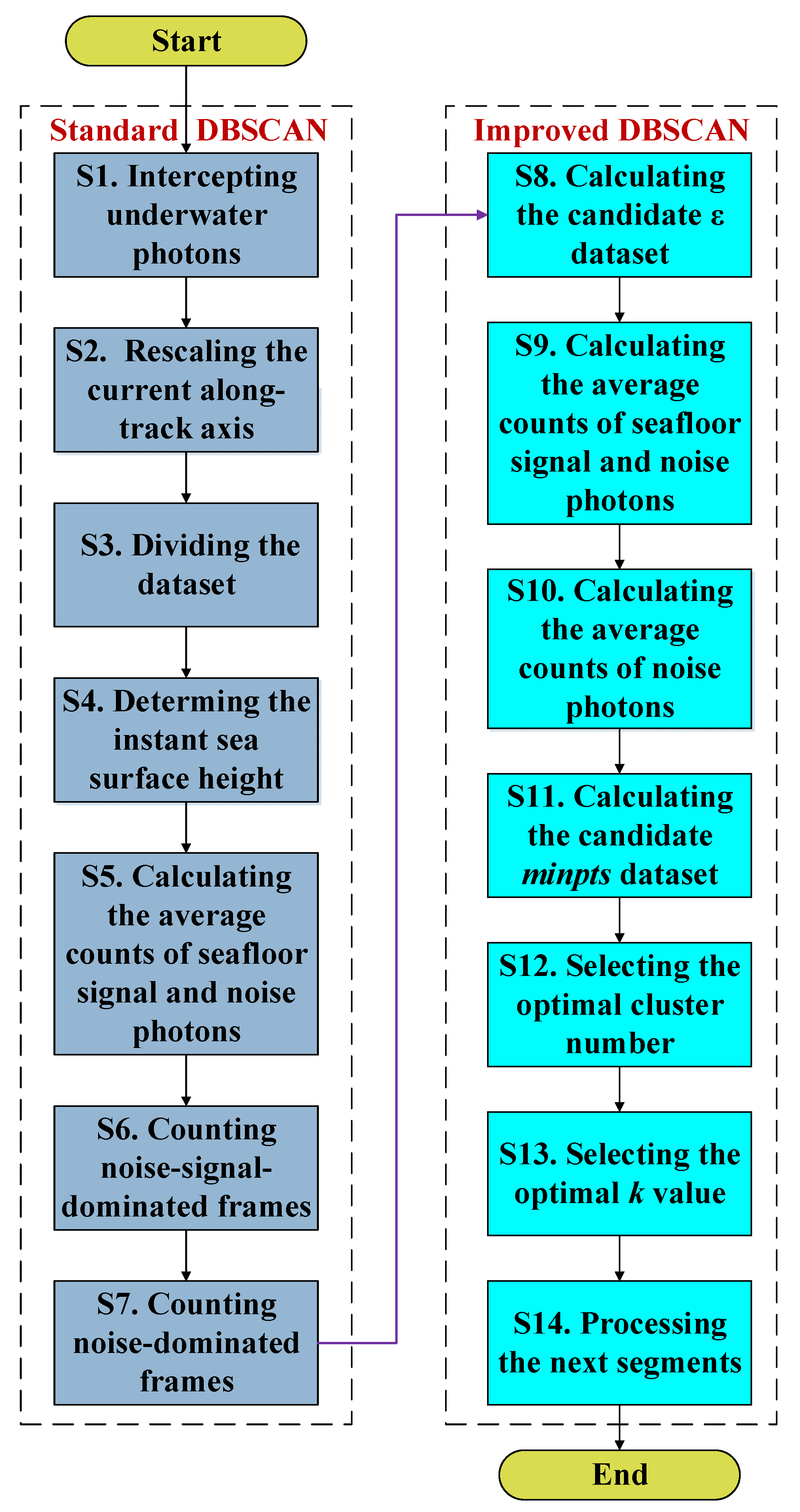
3.1. Adaptive DBSCAN for ICESat-2 Signal Photon Detection
3.2. Bathymetric Correction for Detected Seafloor Photons
3.3. Outlier Removal for Corrected Seafloor Photons
- I.
- Wavelet filteringA hard threshold was optimally set according to the noise level estimation of each layer of the wavelet decomposition.
- II.
- K-medoids classificationThe data were divided into three categories by the K-medoids algorithm [47]. In the K-medoids algorithm, such a point would be selected from the current cluster—the minimum sum of the distances from it to all other points (in the current cluster)—as the center point, which allows the cluster size not to vary greatly.
- III.
- Outlier removal along the geographic axisThe data were sorted along the ICESat-2 along-track first. For each category, the outliers were detected and eliminated using scaled mean absolute difference MAD, and these outliers were eliminated with a window size of 50. The outliers were defined as the elements that differ from the median by more than three scaled from the median in the window. could be expressed as follows:where .
- IV.
- Outlier removal along the depth axisThe remaining data were then processed. The outliers were defined as the elements more than three scaled in data with the window size of 100, and the recognized outliers were removed.
3.4. Matching ICESat-2 Data to Sentinel-2 Images with Different Spatial Resolution
3.5. SDB Retrieval by Merging the Sentinel-2 Data with ICESat-2 Data
3.5.1. Atmosphere Correction
3.5.2. Spatial Operation
3.5.3. Clouds, Whitecaps, and Land Pixels Mask
3.5.4. Empirical SDB Retrieval
4. Results
4.1. Bathymetric Retrieval by ICESat-2 Data
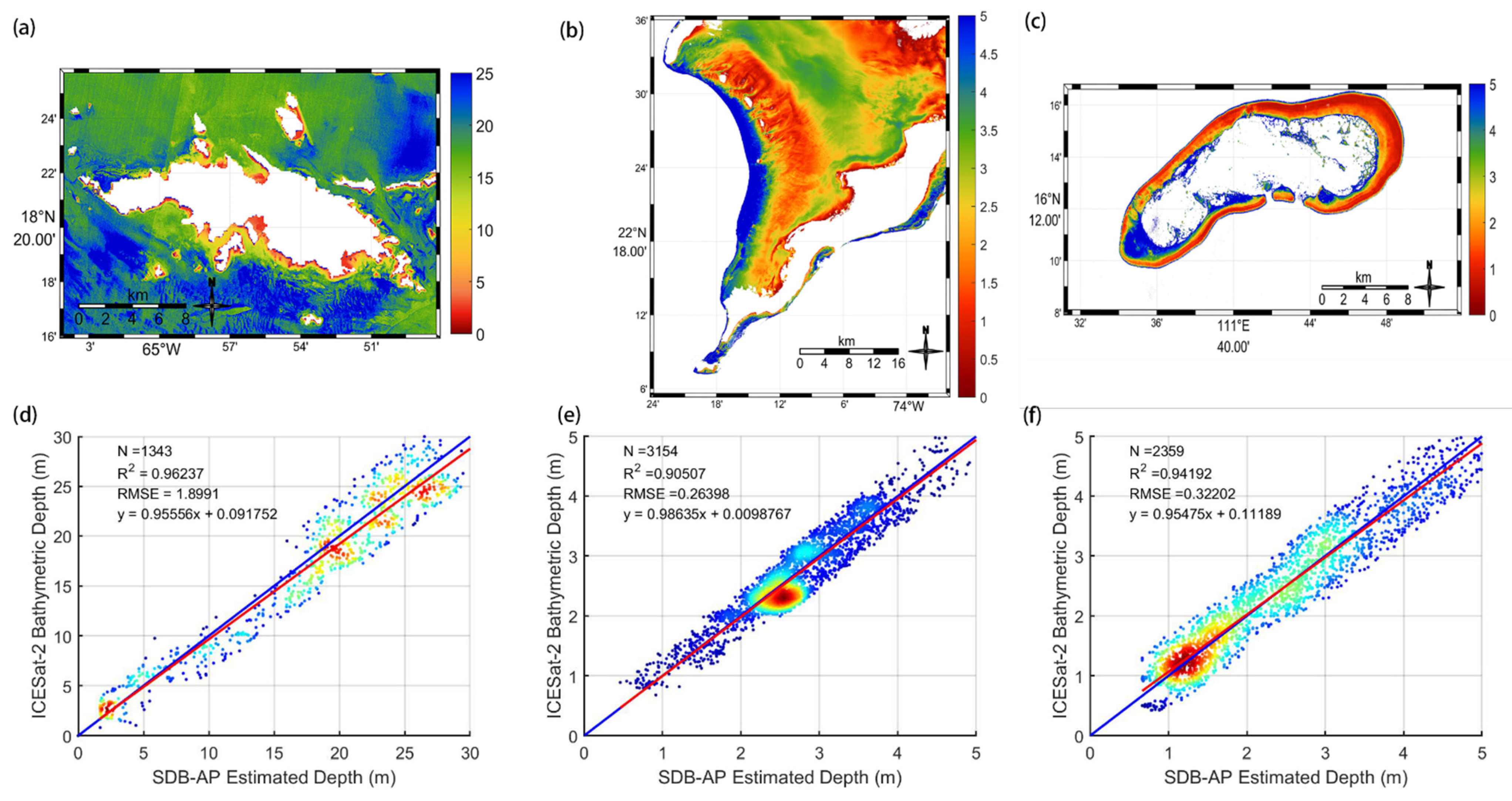
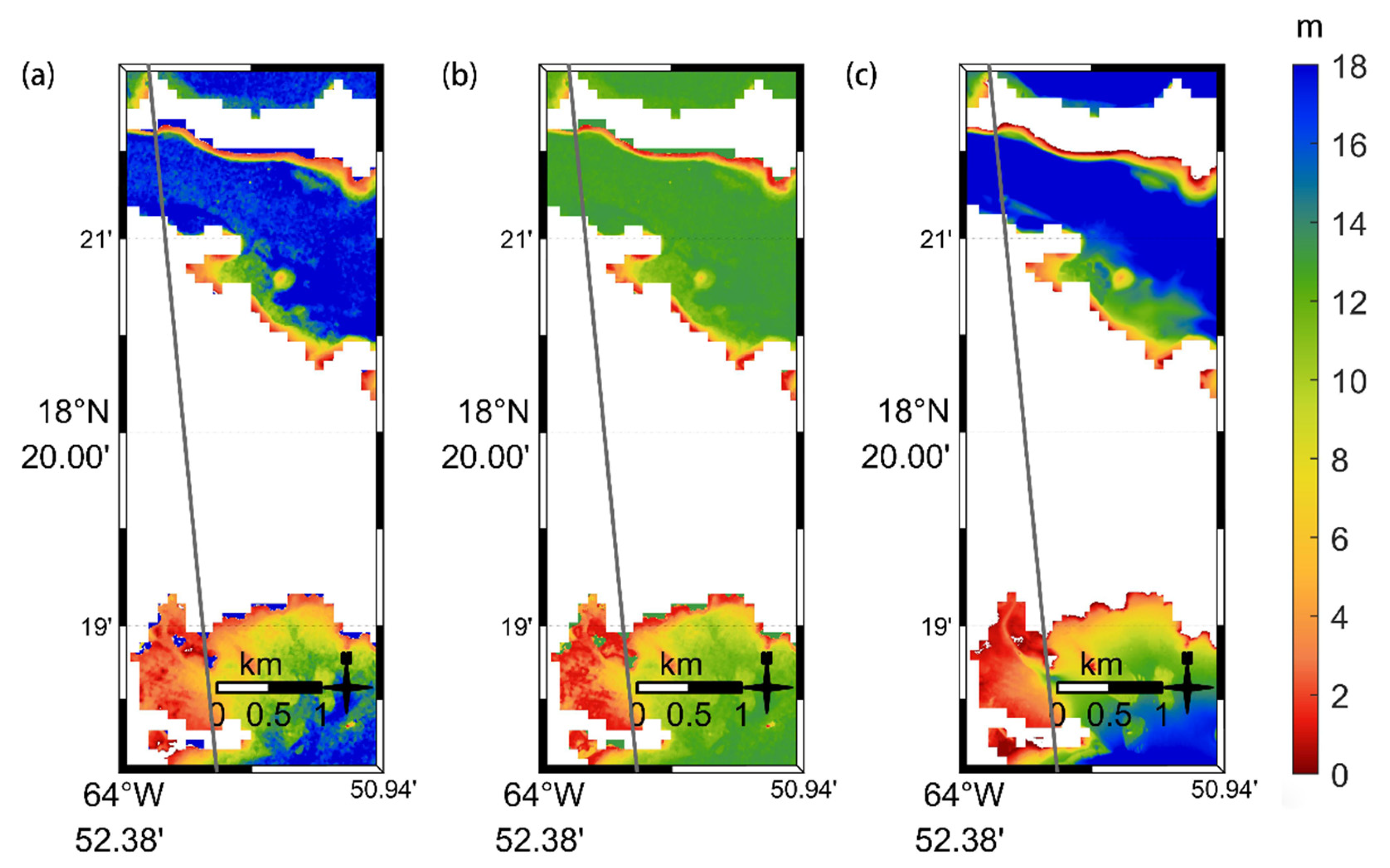
4.2. Bathymetric Retrieval by the SDB-AP
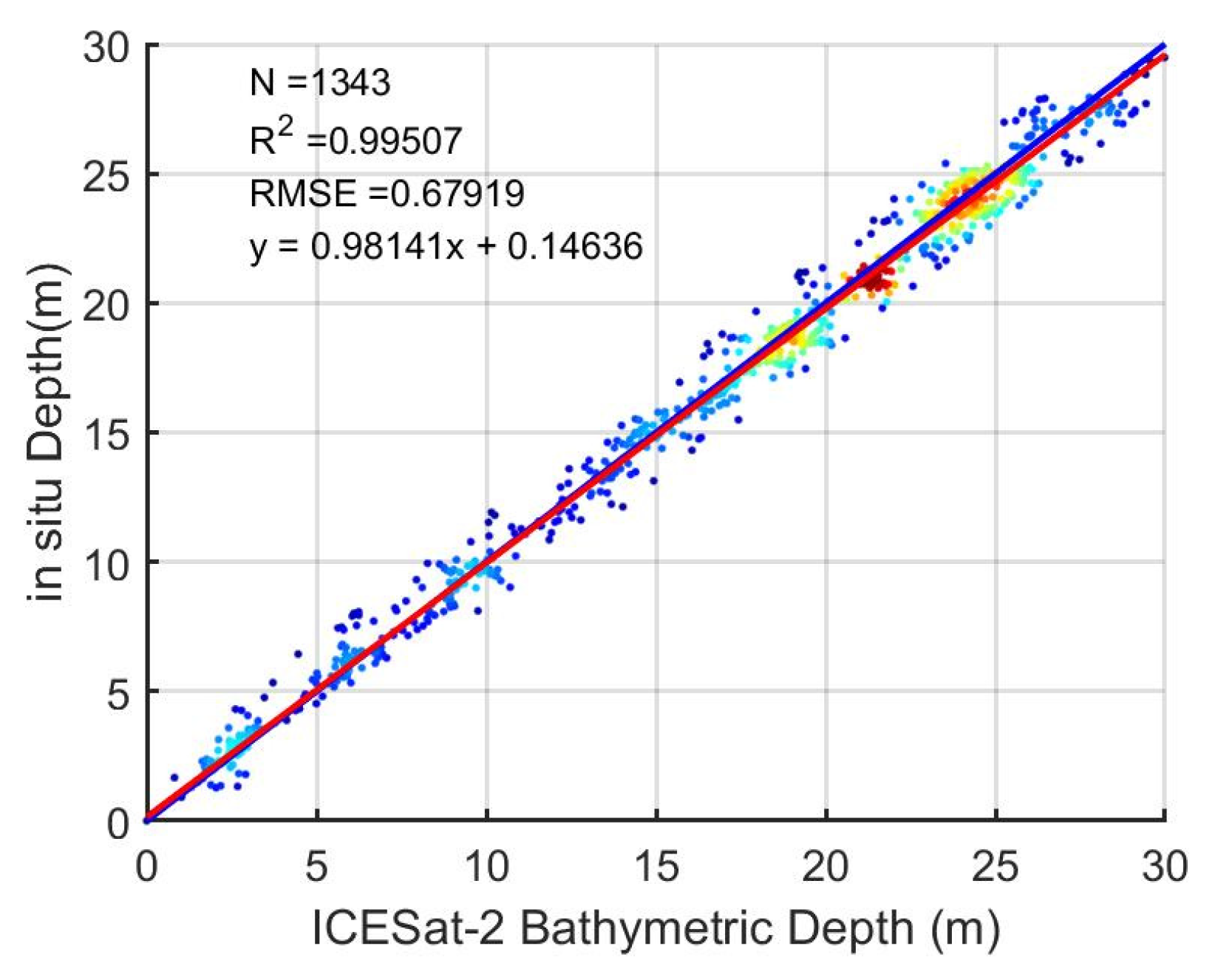
4.3. Validation
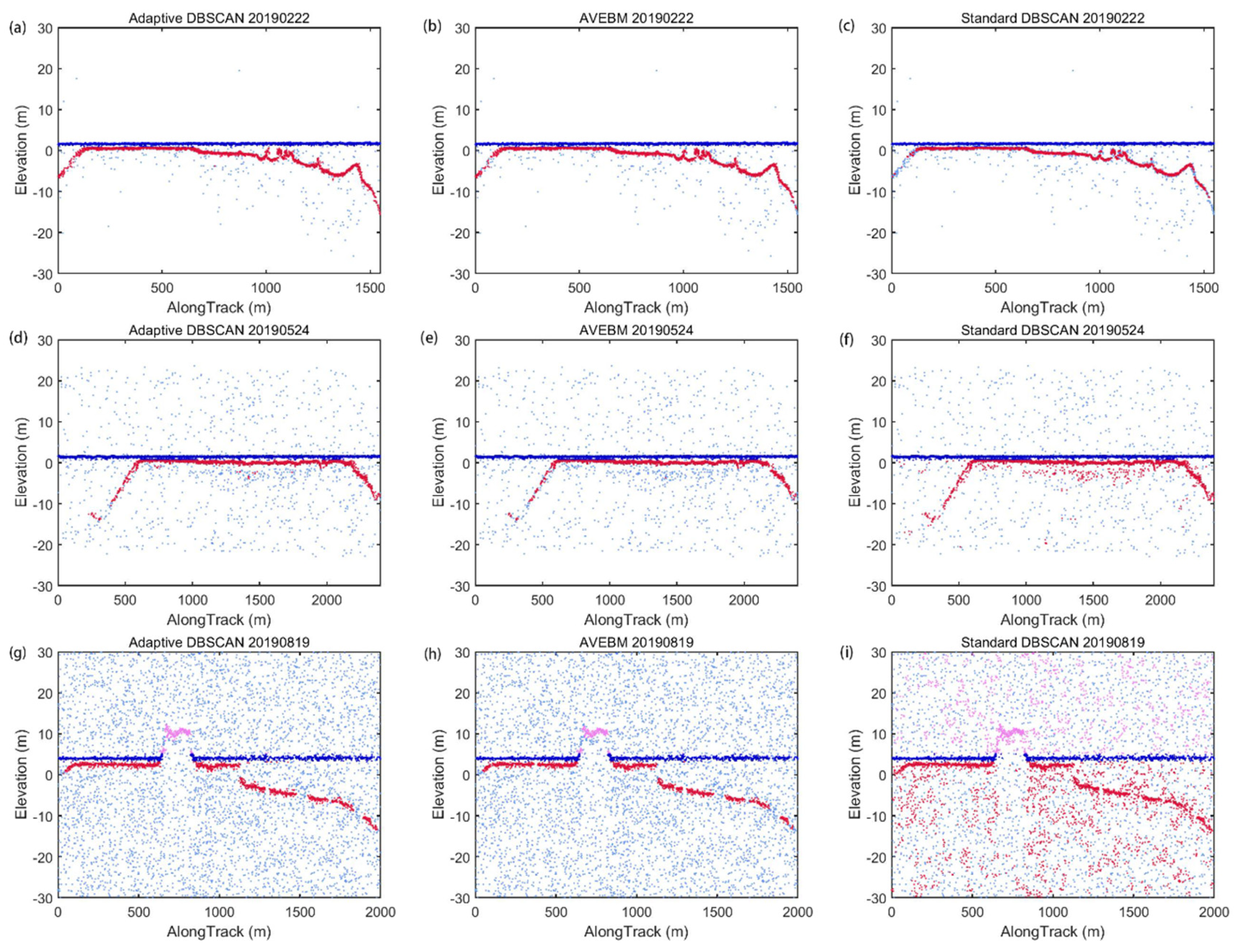
4.4. Comparison between Adaptive DBSCAN and Standard DBSCAN
5. Discussion
5.1. Impact of Outlier Removal on Bathymetry Accuracy
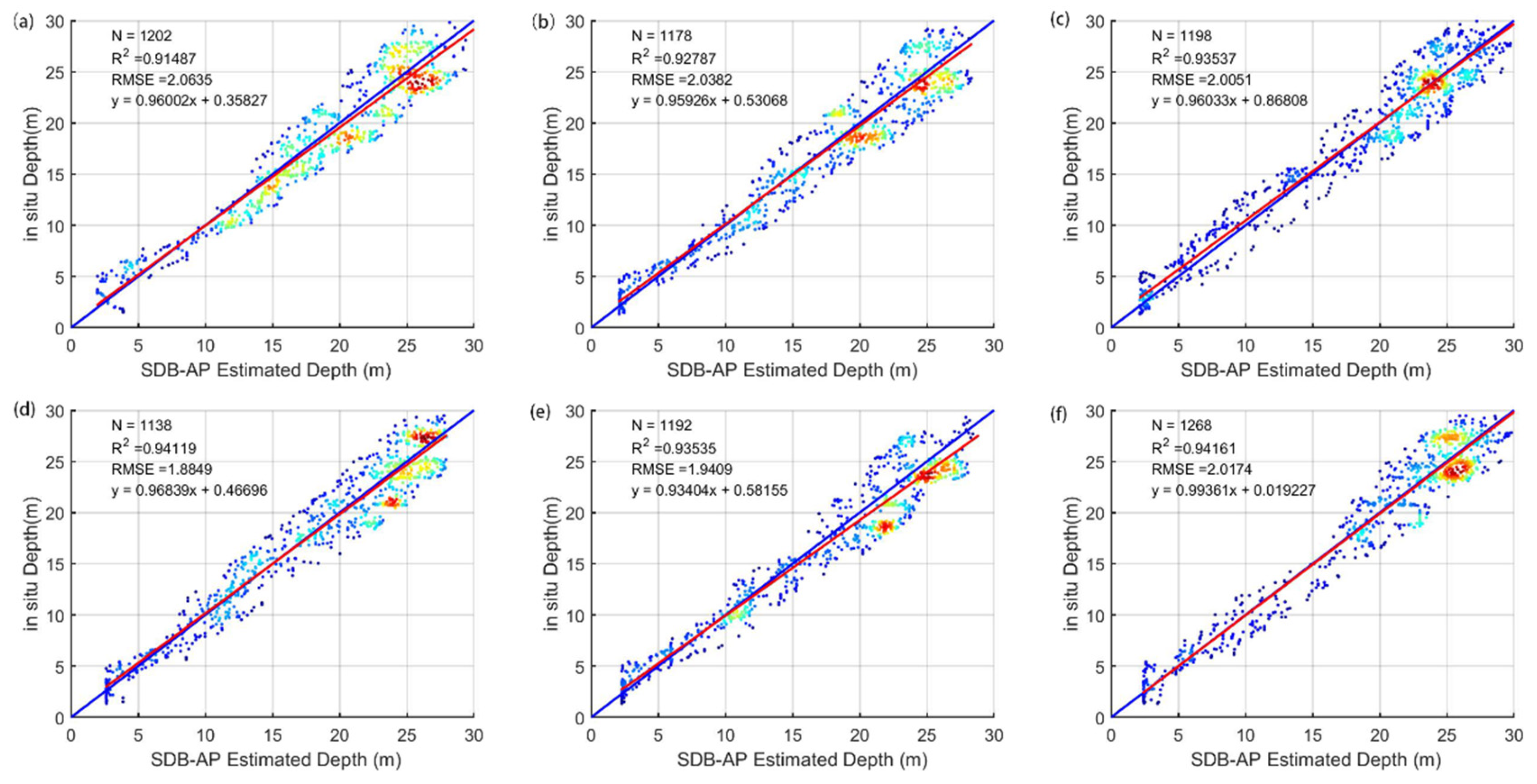
5.2. Stability of SDB-AP
5.3. Comparison with an Adaptive Variable Ellipse Filtering Bathymetric Method
5.4. Comparison with Different Methods Deriving Bathymetry from Sentinel-2
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
- Compute the Euclidean distance matrix from to for all points in dataset .
- Sort each row element in the distance matrix in ascending order.The first column of matrix represents the distance from the object to itself and the elements in column constitute the K-nearest neighbor distance vector of all points.
- Calculate the vector mean value . Calculate all to obtain candidate radius dataset , which is expressed as follows:The values of the candidate dataset less than 0.4 would be eliminated.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Depth (m) | N | R2 | RMSE (m) | Bias (m) | MAE (m) |
|---|---|---|---|---|---|
| 0–10 | 244 | 0.8935 | 1.0700 | −0.1171 | 0.5233 |
| 10–20 | 452 | 0.8125 | 2.6690 | −1.6661 | 2.3869 |
| 20–30 | 541 | 0.4132 | 2.2092 | −0.4535 | 1.8305 |
| 0–30 | 1237 | 0.9225 | 2.0187 | −0.3298 | 1.9875 |
References
- Guenther, G.C.; Brooks, M.W.; LaRocque, P.E. New Capabilities of the “SHOALS” Airborne Lidar Bathymeter. Remote Sens. Environ. 2000, 73, 247–255. [Google Scholar] [CrossRef]
- Trzcinska, K.; Janowski, L.; Nowak, J.; Rucinska-Zjadacz, M.; Kruss, A.; von Deimling, J.S.; Pocwiardowski, P.; Tegowski, J. Spectral features of dual-frequency multibeam echosounder data for benthic habitat mapping. Mar. Geol. 2020, 427, 106239. [Google Scholar] [CrossRef]
- Brown, C.J.; Beaudoin, J.; Brissette, M.; Gazzola, V. Multispectral Multibeam Echo Sounder Backscatter as a Tool for Improved Seafloor Characterization. Geosciences 2019, 9, 126. [Google Scholar] [CrossRef] [Green Version]
- Horta, J.; Pacheco, A.; Moura, D.; Ferreira, O. Can recreational echosounder-chartplotter systems be used to perform accurate nearshore bathymetric surveys? Ocean Dyn. 2014, 64, 1555–1567. [Google Scholar] [CrossRef]
- Saylam, K.; Brown, R.; Hupp, J.R. Assessment of depth and turbidity with airborne Lidar bathymetry and multiband satellite imagery in shallow water bodies of the Alaskan North Slope. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 191–200. [Google Scholar] [CrossRef]
- William, P. Airborne Laser Hydrography II; American Geophysical Union: Washington, DC, USA, 2019. [Google Scholar]
- Cahalane, C.; Magee, A.; Monteys, X.; Casal, G.; Hanafin, J.; Harris, P. A comparison of Landsat 8, RapidEye and Pleiades products for improving empirical predictions of satellite-derived bathymetry. Remote Sens. Environ. 2019, 233, 111414. [Google Scholar] [CrossRef]
- Watts, A.B.; Tozer, B.; Harper, H.; Boston, B.; Shillington, D.J.; Dunn, R. Evaluation of Shipboard and Satellite-Derived Bathymetry and Gravity Data over Seamounts in the Northwest Pacific Ocean. J. Geophys. Res. Solid Earth 2020, 125, e2020JB020396. [Google Scholar] [CrossRef]
- Behrenfeld, M.J.; Gaube, P.; Della Penna, A.; O’Malley, R.T.; Burt, W.J.; Hu, Y.; Bontempi, P.S.; Steinberg, D.K.; Boss, E.; Siegel, D.A.; et al. Global satellite-observed daily vertical migrations of ocean animals. Nat. Cell Biol. 2019, 576, 257–261. [Google Scholar] [CrossRef]
- Chen, P.; Jamet, C.; Zhang, Z.; He, Y.; Mao, Z.; Pan, D.; Wang, T.; Liu, D.; Yuan, D. Vertical distribution of subsurface phytoplankton layer in South China Sea using airborne lidar. Remote Sens. Environ. 2021, 263, 112567. [Google Scholar] [CrossRef]
- Chen, P.; Mao, Z.; Zhang, Z.; Liu, H.; Pan, D. Detecting subsurface phytoplankton layer in Qiandao Lake using shipborne lidar. Opt. Express 2020, 28, 558–569. [Google Scholar] [CrossRef]
- Salameh, E.; Frappart, F.; Almar, R.; Baptista, P.; Heygster, G.; Lubac, B.; Raucoules, D.; Almeida, L.P.; Bergsma, E.W.J.; Capo, S.; et al. Monitoring Beach Topography and Nearshore Bathymetry Using Spaceborne Remote Sensing: A Review. Remote Sens. 2019, 11, 2212. [Google Scholar] [CrossRef] [Green Version]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Benny, A.H.; Dawson, G.J. Satellite Imagery as an Aid to Bathymetric Charting in the Red Sea. Cartogr. J. 1983, 20, 5–16. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Shallow-Water bathymetry using combined lidar and passive multispectral scanner data. Int. J. Remote Sens. 1985, 6, 115–125. [Google Scholar] [CrossRef]
- Casal, G.; Monteys, X.; Hedley, J.; Harris, P.; Cahalane, C.; McCarthy, T. Assessment of empirical algorithms for bathymetry extraction using Sentinel-2 data. Int. J. Remote Sens. 2018, 40, 2855–2879. [Google Scholar] [CrossRef]
- Traganos, D.; Poursanidis, D.; Aggarwal, B.; Chrysoulakis, N.; Reinartz, P. Estimating Satellite-Derived Bathymetry (SDB) with the Google Earth Engine and Sentinel-2. Remote Sens. 2018, 10, 859. [Google Scholar] [CrossRef] [Green Version]
- Muzirafuti, A.; Barreca, G.; Crupi, A.; Faina, G.; Paltrinieri, D.; Lanza, S.; Randazzo, G. The Contribution of Multispectral Satellite Image to Shallow Water Bathymetry Mapping on the Coast of Misano Adriatico, Italy. J. Mar. Sci. Eng. 2020, 8, 126. [Google Scholar] [CrossRef] [Green Version]
- Xu, N.; Ma, X.; Ma, Y.; Zhao, P.; Yang, J.; Wang, X.H. Deriving Highly Accurate Shallow Water Bathymetry from Sentinel-2 and ICESat-2 Datasets by a Multitemporal Stacking Method. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 6677–6685. [Google Scholar] [CrossRef]
- Gernez, P.; Lafon, V.; Lerouxel, A.; Curti, C.; Lubac, B.; Cerisier, S.; Barillé, L. Toward Sentinel-2 High Resolution Remote Sensing of Suspended Particulate Matter in Very Turbid Waters: SPOT4 (Take5) Experiment in the Loire and Gironde Estuaries. Remote Sens. 2015, 7, 9507–9528. [Google Scholar] [CrossRef] [Green Version]
- Westley, K. Satellite-Derived bathymetry for maritime archaeology: Testing its effectiveness at two ancient harbours in the Eastern Mediterranean. J. Archaeol. Sci. Rep. 2021, 38, 103030. [Google Scholar] [CrossRef]
- Caballero, I.; Stumpf, R. Towards Routine Mapping of Shallow Bathymetry in Environments with Variable Turbidity: Contribution of Sentinel-2A/B Satellites Mission. Remote Sens. 2020, 12, 451. [Google Scholar] [CrossRef] [Green Version]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS Bathymetry and Analysis of ATLAS’s Bathymetric Mapping Performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef] [Green Version]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.A.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Narine, L.; Popescu, S.; Neuenschwander, A.; Zhou, T.; Srinivasan, S.; Harbeck, K. Estimating aboveground biomass and forest canopy cover with simulated ICESat-2 data. Remote Sens. Environ. 2019, 224, 1–11. [Google Scholar] [CrossRef]
- Leigh, H.W.; Magruder, L.A.; Carabajal, C.C.; Saba, J.L.; McGarry, J.F. Development of Onboard Digital Elevation and Relief Databases for ICESat-2. IEEE Trans. Geosci. Remote Sens. 2014, 53, 2011–2020. [Google Scholar] [CrossRef]
- Abdalati, W.; Zwally, H.J.; Bindschadler, R.; Csatho, B.; Farrell, S.; Fricker, H.A.; Harding, D.; Kwok, R.; Lefsky, M.; Markus, T.; et al. The ICESat-2 Laser Altimetry Mission. Proc. IEEE 2010, 98, 735–751. [Google Scholar] [CrossRef]
- Farrell, S.L.; Duncan, K.; Buckley, E.M.; Richter-Menge, J.; Li, R. Mapping Sea Ice Surface Topography in High Fidelity with ICESat-2. Geophys. Res. Lett. 2020, 47, e2020GL090644. [Google Scholar] [CrossRef]
- Farrell, S.L.; Brunt, K.M.; Ruth, J.M.; Kuhn, J.M.; Connor, L.N.; Walsh, K.M. Sea-Ice freeboard retrieval using digital photon-counting laser altimetry. Ann. Glaciol. 2015, 56, 167–174. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Xu, N.; Sun, J.; Wang, X.H.; Yang, F.; Li, S. Estimating water levels and volumes of lakes dated back to the 1980s using Landsat imagery and photon-counting lidar datasets. Remote Sens. Environ. 2019, 232, 111287. [Google Scholar] [CrossRef]
- Forfinski-Sarkozi, N.A.; Parrish, C.E. Analysis of MABEL Bathymetry in Keweenaw Bay and Implications for ICESat-2 ATLAS. Remote Sens. 2016, 8, 772. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Le, Y.; Zhang, D.; Wang, Y.; Qiu, Z.; Wang, L. A photon-counting LiDAR bathymetric method based on adaptive variable ellipse filtering. Remote Sens. Environ. 2021, 256, 112326. [Google Scholar] [CrossRef]
- Thomas, N.; Pertiwi, A.P.; Traganos, D.; Lagomasino, D.; Poursanidis, D.; Moreno, S.; Fatoyinbo, L. Space-Borne Cloud-Native Satellite-Derived Bathymetry (SDB) Models Using ICESat-2 and Sentinel-2. Geophys. Res. Lett. 2021, 48, e2020GL092170. [Google Scholar] [CrossRef]
- Forfinski-Sarkozi, N.A.; Parrish, C.E. Active-Passive Spaceborne Data Fusion for Mapping Nearshore Bathymetry. Photogramm. Eng. Remote Sens. 2019, 85, 281–295. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, N.; Liu, Z.; Yang, B.; Yang, F.; Wang, X.H.; Li, S. Satellite-Derived bathymetry using the ICESat-2 lidar and Sentinel-2 imagery datasets. Remote Sens. Environ. 2020, 250, 112047. [Google Scholar] [CrossRef]
- Albright, A.; Glennie, C. Nearshore Bathymetry from Fusion of Sentinel-2 and ICESat-2 Observations. IEEE Geosci. Remote Sens. Lett. 2021, 18, 900–904. [Google Scholar] [CrossRef]
- Pittman, S.J.; Battista, T.A.; Caldow, C.; Clark, R. Survey and Impact Assessment of Derelict Fish Traps in St. Thomas and St. John; NOAA National Centers for Coastal Ocean Science: Silver Spring, MD, USA, 2012.
- Continuously Updated Digital Elevation Model (CUDEM)—Ninth Arc-Second Resolution Bathymetric-Topographic Tiles. Available online: https://chs.coast.noaa.gov/htdata/raster2/elevation/NCEI_ninth_Topobathy_2014_8483/ (accessed on 20 October 2021).
- ATLAS/ICESat-2 L2A Global Geolocated Photon Data, Version 4. Available online: https://nsidc.org/data/atl03 (accessed on 20 October 2021).
- Altamimi, Z.; Rebischung, P.; Métivier, L.; Collilieux, X. ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. J. Geophys. Res. Solid Earth 2016, 121, 6109–6131. [Google Scholar] [CrossRef] [Green Version]
- Neumann, T.; Brenner, A.; Hancock, D.; Luthcke, S.; Lee, J.; Robbins, J.; Harbeck, K.; Bae, S.; Brunt, K.; Gibbons, A.; et al. Algorithm Theoretical Basis Document (ATBD) for Global Geolocated Photons ATL03; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2018. [Google Scholar]
- Neumann, T.A.; Martino, A.J.; Markus, T.; Bae, S.; Bock, M.R.; Brenner, A.C.; Brunt, K.M.; Cavanaugh, J.; Fernandes, S.T.; Hancock, D.W.; et al. The Ice, Cloud, and Land Elevation Satellite—2 mission: A global geolocated photon product derived from the Advanced Topographic Laser Altimeter System. Remote Sens. Environ. 2019, 233, 111325. [Google Scholar] [CrossRef]
- U.S. Geological Survey. Available online: https://earthexplorer.usgs.gov/ (accessed on 20 October 2021).
- Müller, W. Sen2Cor Software Release Note; European Space Agency: Paris, France, 2018. [Google Scholar]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining (KDD-96), Portland, OR, USA, 2–4 August 1996; Volume 34, pp. 226–231. [Google Scholar]
- Ahmed, M.; Naser, A. A novel approach for outlier detection and clustering improvement. In Proceedings of the 2013 IEEE 8th Conference on Industrial Electronics and Applications (ICIEA), Melbourne, VIC, Australia, 19–21 June 2013; pp. 577–582. [Google Scholar] [CrossRef]
- Park, H.-S.; Jun, C.-H. A simple and fast algorithm for K-medoids clustering. Expert Syst. Appl. 2009, 36, 3336–3341. [Google Scholar] [CrossRef]
- Kariya, T.; Sinha, B.K. Detection of Outliers. In Robustness of Statistical Tests; Academic Press: Cambridge, MA, USA, 1989. [Google Scholar]
- Obregón, M.; Rodrigues, G.; Costa, M.J.; Potes, M.; Silva, A.M. Validation of ESA Sentinel-2 L2A Aerosol Optical Thickness and Columnar Water Vapour during 2017–2018. Remote Sens. 2019, 11, 1649. [Google Scholar] [CrossRef] [Green Version]
- SNAP Supported Plugins Sen2Cor. Available online: http://step.esa.int/main/snap-supported-plugins/sen2cor/ (accessed on 20 October 2021).
- Louis, J.; Debaecker, V.; Pflug, B.; Main-Knorn, M.; Bieniarz, J.; Mueller-Wilm, U.; Cadau, E.; Gascon, F. SENTINEL-2 SEN2COR: L2A Processor for Users. In Proceedings of the Living Planet Symposium 2016, Prague, Czech Republic, 9–13 May 2016; pp. 1–8. [Google Scholar]
- Caballero, I.; Stumpf, R.P. Retrieval of nearshore bathymetry from Sentinel-2A and 2B satellites in South Florida coastal waters. Estuar. Coast. Shelf Sci. 2019, 226, 106277. [Google Scholar] [CrossRef]
- Casal, G.; Harris, P.; Monteys, X.; Hedley, J.; Cahalane, C.; McCarthy, T. Understanding satellite-derived bathymetry using Sentinel 2 imagery and spatial prediction models. GIScience Remote Sens. 2019, 57, 271–286. [Google Scholar] [CrossRef]
- Vahtmäe, E.; Kutser, T. Airborne mapping of shallow water bathymetry in the optically complex waters of the Baltic Sea. J. Appl. Remote Sens. 2016, 10, 25012. [Google Scholar] [CrossRef]
- Bergsma, E.W.; Almar, R.; Rolland, A.; Binet, R.; Brodie, K.L.; Bak, A.S. Coastal morphology from space: A showcase of monitoring the topography-bathymetry continuum. Remote Sens. Environ. 2021, 261, 112469. [Google Scholar] [CrossRef]
- Al Najar, M.; Thoumyre, G.; Bergsma, E.W.J.; Almar, R.; Benshila, R.; Wilson, D.G. Satellite derived bathymetry using deep learning. Mach. Learn. 2021, 1–24. [Google Scholar] [CrossRef]
- Degnan, J.J. Photon-Counting multikilohertz microlaser altimeters for airborne and spaceborne topographic measurements. J. Geodyn. 2002, 34, 503–549. [Google Scholar] [CrossRef] [Green Version]











| Site | St. Thomas | Acklins Island | Huaguang Reef | Shanhu Island | Nan Island | |
|---|---|---|---|---|---|---|
| Location | 18.26°~18.43°N 64.80°~65.07°W | 22.10°~22.60°N 73.90°~74.40°W | 16.13°~16.28°N 111.52°~111.86°E | 111.617°~111.618°N 16.534°~16.548°E | 111.612°~111.614°N 16.529°~16.55°E | 112.202°~112.333°N 16.956°~16.933°E |
| ICESat-2 Tracks-beam | 22 November 2018-GT1/2/3R 10 February 2019-GT1/2/3L 13 November 2020-GT1L | 12 November 2018-GT1/2L 11 February 2019-GT1/2/3R 12 March 2019-GT1/2/3R 3 June 2019-GT1/2/3L 2 September 2019-GT2/3R | 22 October 2018-GT1/2/3R 22 February 2019-GT1/2/3L 21 April 2019-GT1/2/3L 19 April 2020-GT1/2/3R 19 July 2020-GT1/2/3L 20 August 2020-GT1/2L | 22 February 2019-GT3L | 24 May 2019-GT2L | 19 August 2019-GT1L |
| Sentinel-2 | 15 January 2019 1 March 2016 21 November 2018 21 March 2019 12 September 2019 4 April 2020 3 May 2021 | 27 January 2020 | 13 August 2019 | \ | \ | \ |
| In situ Data | 9 December 2014 CUDEM | \ | \ | \ | \ | \ |
| Depth (m) | N | R2 | RMSE (m) | Bias (m) | MAE (m) |
|---|---|---|---|---|---|
| 0–10 | 382 | 0.9035 | 0.9548 | 0.1039 | 0.5397 |
| 10–20 | 246 | 0.7951 | 2.2463 | −1.0138 | 1.9493 |
| 20–30 | 420 | 0.4281 | 2.5499 | −0.8490 | 2.2155 |
| Depth (m) | N | R2 | RMSE (m) | Bias (m) | MAE (m) |
|---|---|---|---|---|---|
| 0–10 | 199 | 0.82516 | 1.2259 | 0.3846 | 1.0195 |
| 10–20 | 331 | 0.8260 | 1.8768 | −0.8994 | 1.6265 |
| 20–30 | 461 | 0.4697 | 2.4056 | −0.7402 | 2.08725 |
| Depth (m) | N | R2 | RMSE (m) | Bias (m) | MAE (m) |
|---|---|---|---|---|---|
| 0–10 | 289 | 0.8073 | 1.3980 | 0.4948 | 1.1408 |
| 10–20 | 377 | 0.8293 | 1.6895 | 1.1531 | 1.4291 |
| 20–30 | 461 | 0.4406 | 2.1800 | 0.5675 | 1.8222 |
| 0–30 | 1127 | 0.9425 | 2.0068 | 0.8560 | 1.6428 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, C.; Chen, P.; Pan, D.; Zhong, C.; Zhang, Z. Improved Filtering of ICESat-2 Lidar Data for Nearshore Bathymetry Estimation Using Sentinel-2 Imagery. Remote Sens. 2021, 13, 4303. https://doi.org/10.3390/rs13214303
Xie C, Chen P, Pan D, Zhong C, Zhang Z. Improved Filtering of ICESat-2 Lidar Data for Nearshore Bathymetry Estimation Using Sentinel-2 Imagery. Remote Sensing. 2021; 13(21):4303. https://doi.org/10.3390/rs13214303
Chicago/Turabian StyleXie, Congshuang, Peng Chen, Delu Pan, Chunyi Zhong, and Zhenhua Zhang. 2021. "Improved Filtering of ICESat-2 Lidar Data for Nearshore Bathymetry Estimation Using Sentinel-2 Imagery" Remote Sensing 13, no. 21: 4303. https://doi.org/10.3390/rs13214303
APA StyleXie, C., Chen, P., Pan, D., Zhong, C., & Zhang, Z. (2021). Improved Filtering of ICESat-2 Lidar Data for Nearshore Bathymetry Estimation Using Sentinel-2 Imagery. Remote Sensing, 13(21), 4303. https://doi.org/10.3390/rs13214303