
Intercalibration of Backscatter Measurements among Ku-Band Scatterometers Onboard the Chinese HY-2 Satellite Constellation

 ,
, 
 , , ,
, , ,
Abstract
:1. Introduction
2. Datasets and Methods
2.1. Datasets
2.2. Direct Comparison Using Collocated Measurements
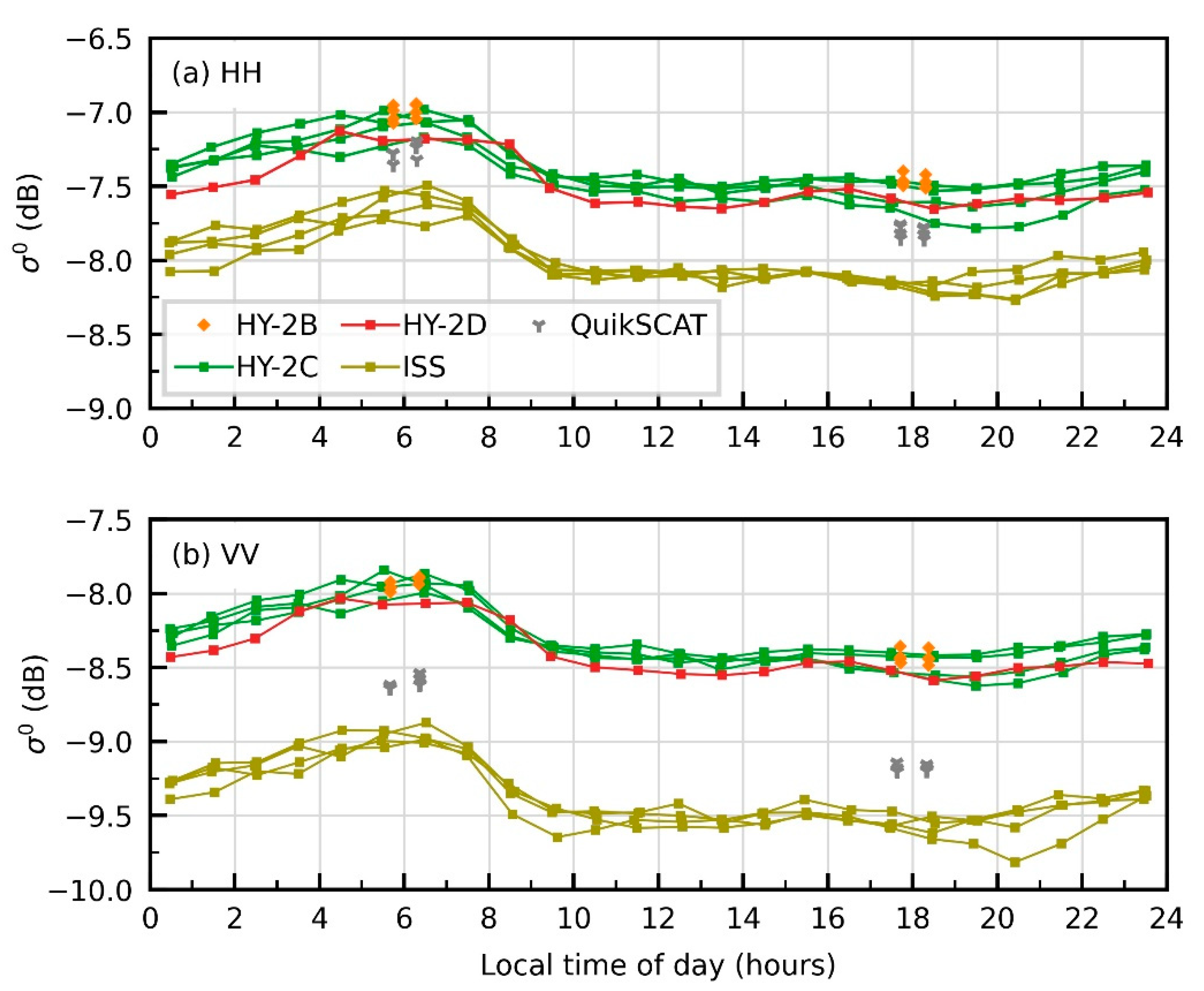
2.3. Intercalibration over the Amazon Rainforest
- Average the data for the local time in range of [5:00, 7:00] for each polarization. Then form the same average for data in the local time range of (17:00, 19:00). The results are denoted as ,,, and .
- Compute the difference of average values between two of HSCAT instruments at 6:00 and 18:00 separately for each polarization. The results are denoted as ,,, and .
- Compute the mean difference for the same polarization; the results are denoted as and .
2.4. Double-Difference Technique Based on Backscatter Simulations over the Global Oceans
3. Results and Discussions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Remund, Q.P.; Long, D.G. A decade of QuikSCAT scatterometer sea ice extent data. IEEE Trans. Geosci. Remote Sens. 2013, 52, 4281–4290. [Google Scholar] [CrossRef] [Green Version]
- Belmonte Rivas, M.; Otosaka, I.; Stoffelen, A.; Verhoef, A. A scatterometer record of sea ice extents and backscatter: 1992–2016. Cryosphere 2018, 12, 2941–2953. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Zhao, C.; Zhao, Y.; Wang, Z.; Shi, L. Polar sea ice monitoring using HY-2A scatterometer measurements. Remote Sens. 2016, 8, 688. [Google Scholar] [CrossRef] [Green Version]
- Turk, F.J.; Sikhakolli, R.; Kirstetter, P.; Durden, S.L. Exploiting over-land OceanSat-2 scatterometer observations to capture short-period time-integrated precipitation. J. Hydrometeorol. 2015, 16, 2519–2535. [Google Scholar] [CrossRef]
- Brocca, L.; Massari, C.; Ciabatta, L.; Wagner, W.; Stoffelen, A. Remote sensing of terrestrial rainfall from Ku-band scatterometers. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 533–539. [Google Scholar] [CrossRef]
- Liu, W.T. Progress in scatterometer application. J. Oceanogr. 2002, 58, 121–136. [Google Scholar] [CrossRef]
- Ricciardulli, L.; Wentz, F.J. A scatterometer geophysical model function for climate-quality winds: QuikSCAT Ku-2011. J. Atmos. Ocean. Technol. 2015, 32, 1829–1846. [Google Scholar] [CrossRef]
- Stoffelen, A.; Verspeek, J.A.; Vogelzang, J.; Verhoef, A. The CMOD7 geophysical model function for ASCAT and ERS wind retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2123–2134. [Google Scholar] [CrossRef]
- Wang, Z.; Stoffelen, A.; Zhang, B.; He, Y.; Lin, W.; Li, X. Inconsistencies in scatterometer wind products based on ASCAT and OSCAT-2 collocations. Remote Sens. Environ. 2019, 225, 207–216. [Google Scholar] [CrossRef]
- Wang, Z.; Stoffelen, A.; Zou, J.; Lin, W.; Verhoef, A.; Zhang, Y.; He, Y.; Lin, M. Validation of new sea surface wind products from Scatterometers Onboard the HY-2B and MetOp-C satellites. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4387–4394. [Google Scholar] [CrossRef]
- Wang, Z.; Stoffelen, A.; Fois, F.; Verhoef, A.; Zhao, C.; Lin, M.; Chen, G. SST dependence of Ku-and C-band backscatter measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2135–2146. [Google Scholar] [CrossRef]
- Wang, Z.; Zou, J.; Stoffelen, A.; Lin, W.; Verhoef, A.; Li, X.; He, Y.; Zhang, Y.; Lin, M. Scatterometer Sea Surface Wind Product Validation for HY-2C. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6156–6164. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, J.; Lin, M.; Zhang, Y.; Chang, Y. Evaluating Chinese HY-2B HSCAT ocean wind products using buoys and other scatterometers. IEEE Geosci. Remote Sens. Lett. 2019, 17, 923–927. [Google Scholar] [CrossRef]
- Elyouncha, A.; Neyt, X. C-band satellite scatterometer intercalibration. IEEE Trans. Geosci. Remote Sens. 2012, 51, 1478–1491. [Google Scholar] [CrossRef]
- Anderson, C.; Figa-Saldana, J.; Wilson, J.J.W.; Ticconi, F. Validation and cross-validation methods for ASCAT. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2232–2239. [Google Scholar] [CrossRef]
- Rivas, M.B.; Stoffelen, A.; Verspeek, J.; Verhoef, A.; Neyt, X.; Anderson, C. Cone metrics: A new tool for the intercomparison of scatterometer records. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2195–2204. [Google Scholar] [CrossRef] [Green Version]
- Bhowmick, S.A.; Kumar, R.; Kumar, A.K. Cross calibration of the OceanSAT-2 scatterometer with QuikSCAT scatterometer using natural terrestrial targets. IEEE Trans. Geosci. Remote Sens. 2013, 52, 3393–3398. [Google Scholar] [CrossRef]
- Zec, J.; Jones, W.L.; Alsabah, R.; Al-Sabbagh, A. RapidScat cross-calibration using the double difference technique. Remote Sens. 2017, 9, 1160. [Google Scholar] [CrossRef] [Green Version]
- Madsen, N.M.; Long, D.G. Calibration and validation of the RapidScat scatterometer using tropical rainforests. IEEE Trans. Geosci. Remote Sens. 2015, 54, 2846–2854. [Google Scholar] [CrossRef]
- Stoffelen, A. A simple method for calibration of a scatterometer over the ocean. J. Atmos. Ocean. Technol. 1999, 16, 275–282. [Google Scholar] [CrossRef] [Green Version]
- de Kloe, J.; Stoffelen, A.; Verhoef, A. Improved use of scatterometer measurements by using stress-equivalent reference winds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2340–2347. [Google Scholar] [CrossRef]
- Kunz, L.B.; Long, D.G. Calibrating SeaWinds and QuikSCAT scatterometers using natural land targets. IEEE Geosci. Remote Sens. Lett. 2005, 2, 182–186. [Google Scholar] [CrossRef]
- Zhu, D.; Zhang, L.; Dong, X.; Yun, R.; Lin, W. Preliminary calibrations of the CFOSAT scatterometer. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 8347–8349. [Google Scholar] [CrossRef]
- Satake, M.; Hanado, H. Diurnal change of Amazon rain forest/spl sigma//sup 0/observed by Ku-band spaceborne radar. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1127–1134. [Google Scholar] [CrossRef]
- van Emmerik, T.; Steele-Dunne, S.; Paget, A.; Oliveira, R.S.; Bittencourt, P.R.; Barros, F.D.V.; van de Giesen, N. Water stress detection in the Amazon using radar. Geophys. Res. Lett. 2017, 44, 6841–6849. [Google Scholar] [CrossRef] [Green Version]
- Jaruwatanadilok, S.; Stiles, B.W. Trends and variation in Ku-band backscatter of natural targets on land observed in QuikSCAT data. IEEE Trans. Geosci. Remote Sens. 2013, 52, 4383–4390. [Google Scholar] [CrossRef]
- KNMI. NSCAT-4 Geophysical Model Function. Available online: https://scatterometer.knmi.nl/nscat4_gmf/ (accessed on 26 September 2021).
- Portabella, M.; Stoffelen, A. Rain detection and quality control of SeaWinds. J. Atmos. Ocean. Technol. 2001, 18, 1171–1183. [Google Scholar] [CrossRef]
- Stoffelen, A.; Vogelzang, J. Wind Bias Correction Guide. Document SAF/OSI/CDOP3/KNMI/SCI/GUI/390, NWPSAF-KN-UD-007, Version 1.5, 18-01-2021, KNMI, The Netherlands. Available online: https://nwp-saf.eumetsat.int/site/download/documentation/scatterometer/Wind_Bias_Correction_Guide_v1.5.pdf (accessed on 8 November 2021).
- Portabella, M.; Stoffelen, A. On scatterometer ocean stress. J. Atmos. Ocean. Technol. 2009, 26, 368–382. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Stoffelen, A. Improved rain screening for ku-band wind scatterometry. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2494–2503. [Google Scholar] [CrossRef]
- Belmonte Rivas, M.; Stoffelen, A. Characterizing ERA-Interim and ERA5 surface wind biases using ASCAT. Ocean Sci. 2019, 15, 831–852. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scatterometer | Products | Initial Corrections | Time Period | |
|---|---|---|---|---|
| HH | VV | |||
| HY-2B | L1B V20 | +0.5 dB | −0.7 dB | December 2018~August 2021 |
| HY-2C | L1B V20 | −1.3 dB | −1.4 dB | October 2020~August 2021 |
| HY-2D | L1B V22 | −0.6 dB | −0.5 dB | June 2021~August 2021 |
| QuikSCAT | L2A V2 | / | / | January 2000~December 2008 |
| ISS | L2A V1.1 | / | / | October 2014~August 2015 |
| Case | Collocated | Rainforest | NOC | |||
|---|---|---|---|---|---|---|
| HH (dB) | VV (dB) | HH (dB) | VV (dB) | HH (dB) | VV (dB) | |
| HY-2B and HY-2C | +0.132 | −0.060 | +0.043 | −0.056 | +0.133 | +0.022 |
| HY-2B and HY-2D | +0.155 | +0.019 | +0.128 | +0.039 | +0.202 | +0.089 |
| HY-2C and HY-2D | +0.076 | +0.067 | +0.086 | +0.096 | +0.069 | +0.067 |
| Case | Collocated | Rainforest | NOC | |||
|---|---|---|---|---|---|---|
| HH (dB) | VV (dB) | HH (dB) | VV (dB) | HH (dB) | VV (dB) | |
| HY-2B and HY-2C | +0.026 | 0.114 | −0.063 | −0.002 | +0.027 | +0.076 |
| HY-2B and HY-2D | −0.027 | +0.006 | −0.054 | +0.026 | +0.020 | +0.076 |
| HY-2C and HY-2D | 0.000 | 0.000 | +0.010 | +0.029 | −0.007 | 0.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Zou, J.; Zhang, Y.; Stoffelen, A.; Lin, W.; He, Y.; Feng, Q.; Zhang, Y.; Mu, B.; Lin, M. Intercalibration of Backscatter Measurements among Ku-Band Scatterometers Onboard the Chinese HY-2 Satellite Constellation. Remote Sens. 2021, 13, 4783. https://doi.org/10.3390/rs13234783
Wang Z, Zou J, Zhang Y, Stoffelen A, Lin W, He Y, Feng Q, Zhang Y, Mu B, Lin M. Intercalibration of Backscatter Measurements among Ku-Band Scatterometers Onboard the Chinese HY-2 Satellite Constellation. Remote Sensing. 2021; 13(23):4783. https://doi.org/10.3390/rs13234783
Chicago/Turabian StyleWang, Zhixiong, Juhong Zou, Youguang Zhang, Ad Stoffelen, Wenming Lin, Yijun He, Qian Feng, Yi Zhang, Bo Mu, and Mingsen Lin. 2021. "Intercalibration of Backscatter Measurements among Ku-Band Scatterometers Onboard the Chinese HY-2 Satellite Constellation" Remote Sensing 13, no. 23: 4783. https://doi.org/10.3390/rs13234783
APA StyleWang, Z., Zou, J., Zhang, Y., Stoffelen, A., Lin, W., He, Y., Feng, Q., Zhang, Y., Mu, B., & Lin, M. (2021). Intercalibration of Backscatter Measurements among Ku-Band Scatterometers Onboard the Chinese HY-2 Satellite Constellation. Remote Sensing, 13(23), 4783. https://doi.org/10.3390/rs13234783