Forest Height Estimation Using a Single-Pass Airborne L-Band Polarimetric and Interferometric SAR System and Tomographic Techniques


Abstract
:
Short Biography of Author | Dr. Qiaoping Zhang is a geomatics scientist with more than 20 years of research and development experience in geographic information system, photogrammetry, and remote sensing. He received his first doctoral degree in Photogrammetry and Remote Sensing fromWuhan University (China) in 2002 and a second doctoral degree in Geomatics Engineering from University of Calgary (Canada) in 2006. Since 2006, he has been one of the leading researchers at Intermap. He has co-authored more than 40 journal research papers and conference publications. He was one of the ASPRS GeoEye Foundation Award recipients in 2006 and he held Alberta Innovates Fund–Research and Development Associate from 2006 to 2008. He is an active member of ASPRS and the Association of Professional Engineers, Geologists and Geophysicists of Alberta. |
1. Introduction
2. Presentation of Study Data and Acquisition System
2.1. Test Site Presentation
2.2. Acquisition System
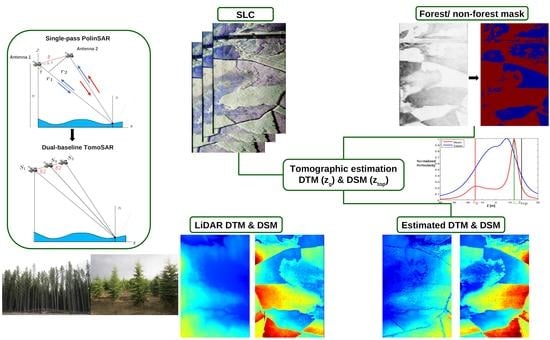
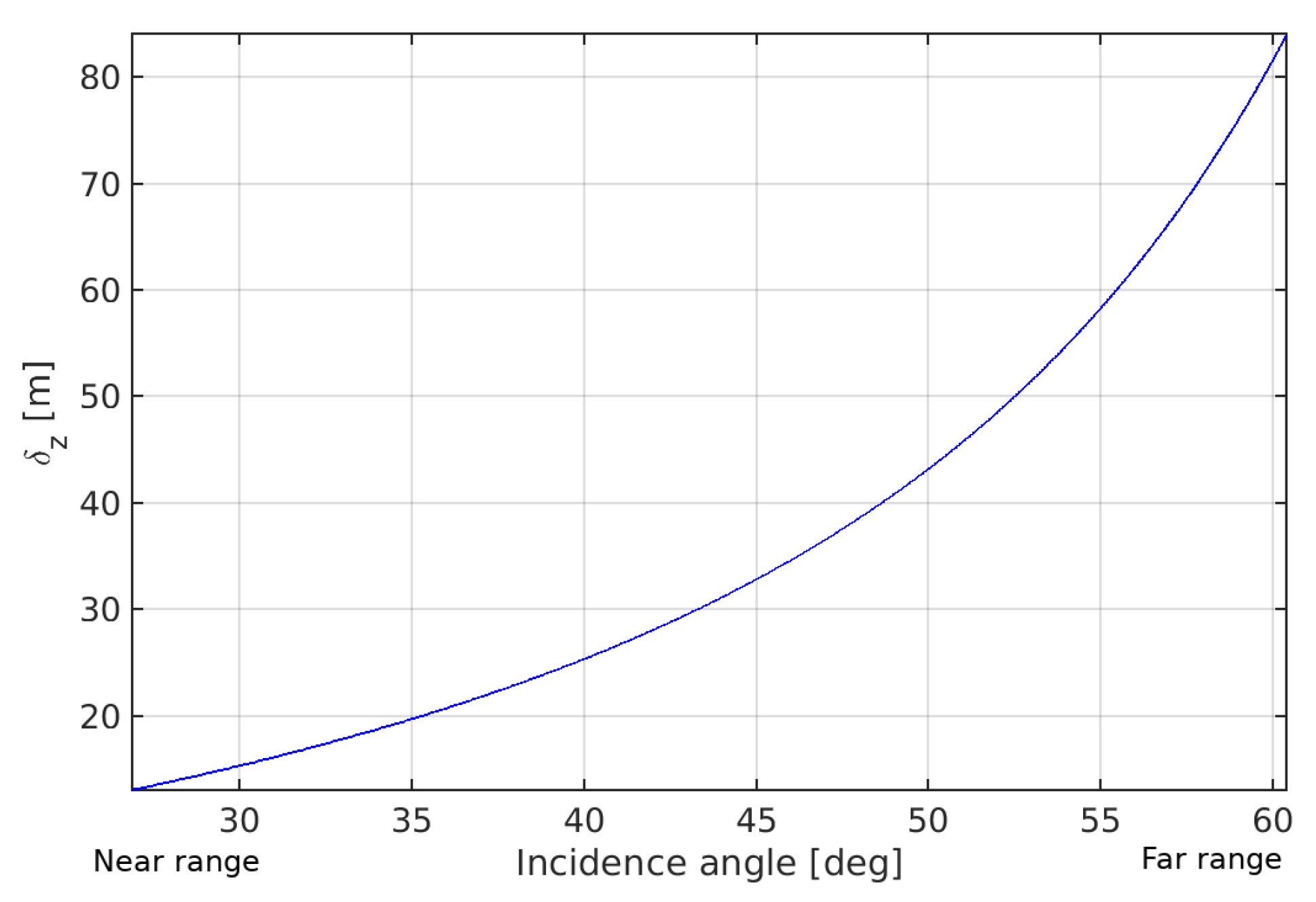
2.3. Single-Pass Dual-Baseline Tomographic Configuration
3. Estimation of Forest DTM and DSM
3.1. Polarimetric Tomographic Processing
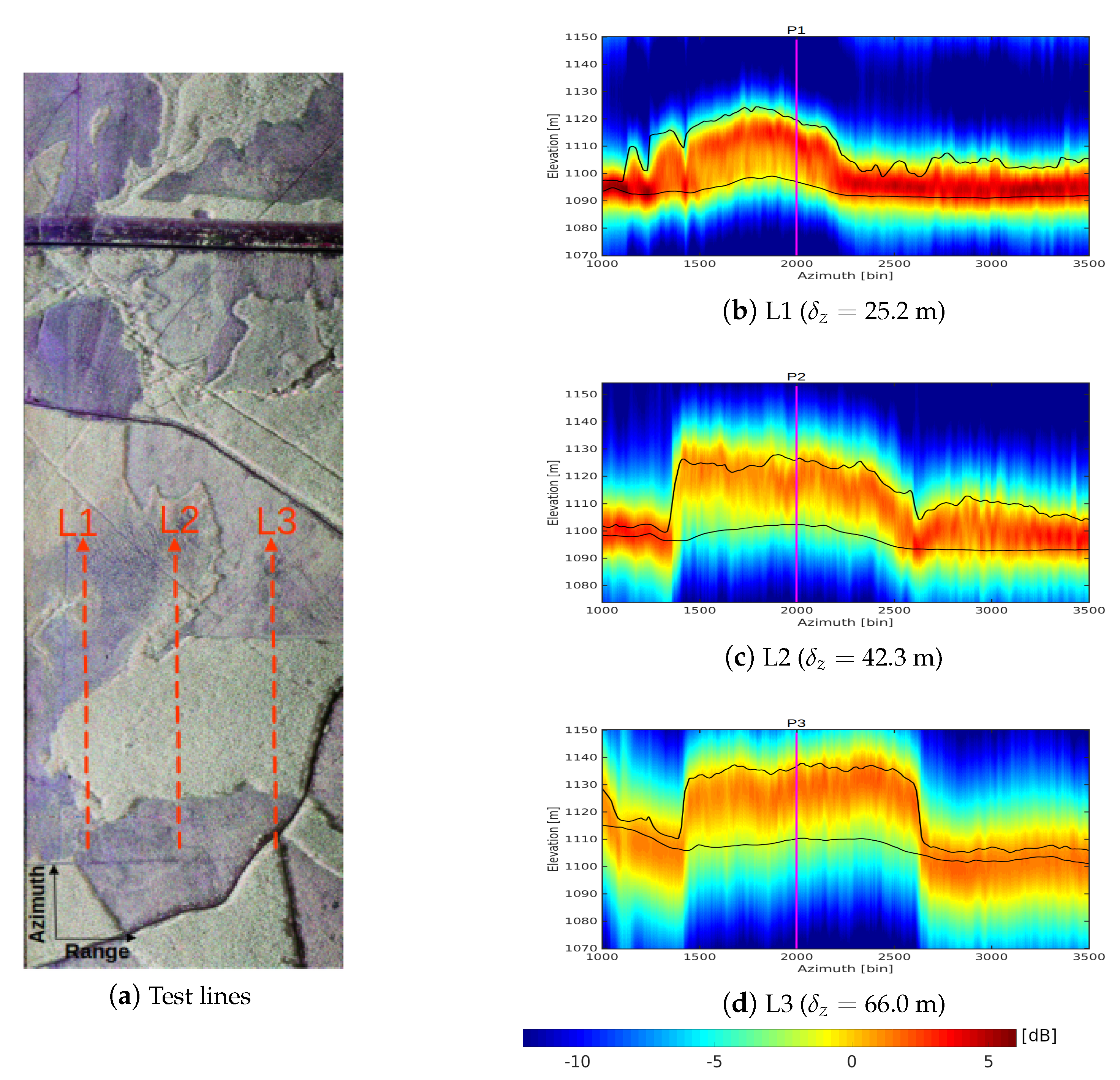
3.2. Limitation Due to a Coarse Vertical Resolution
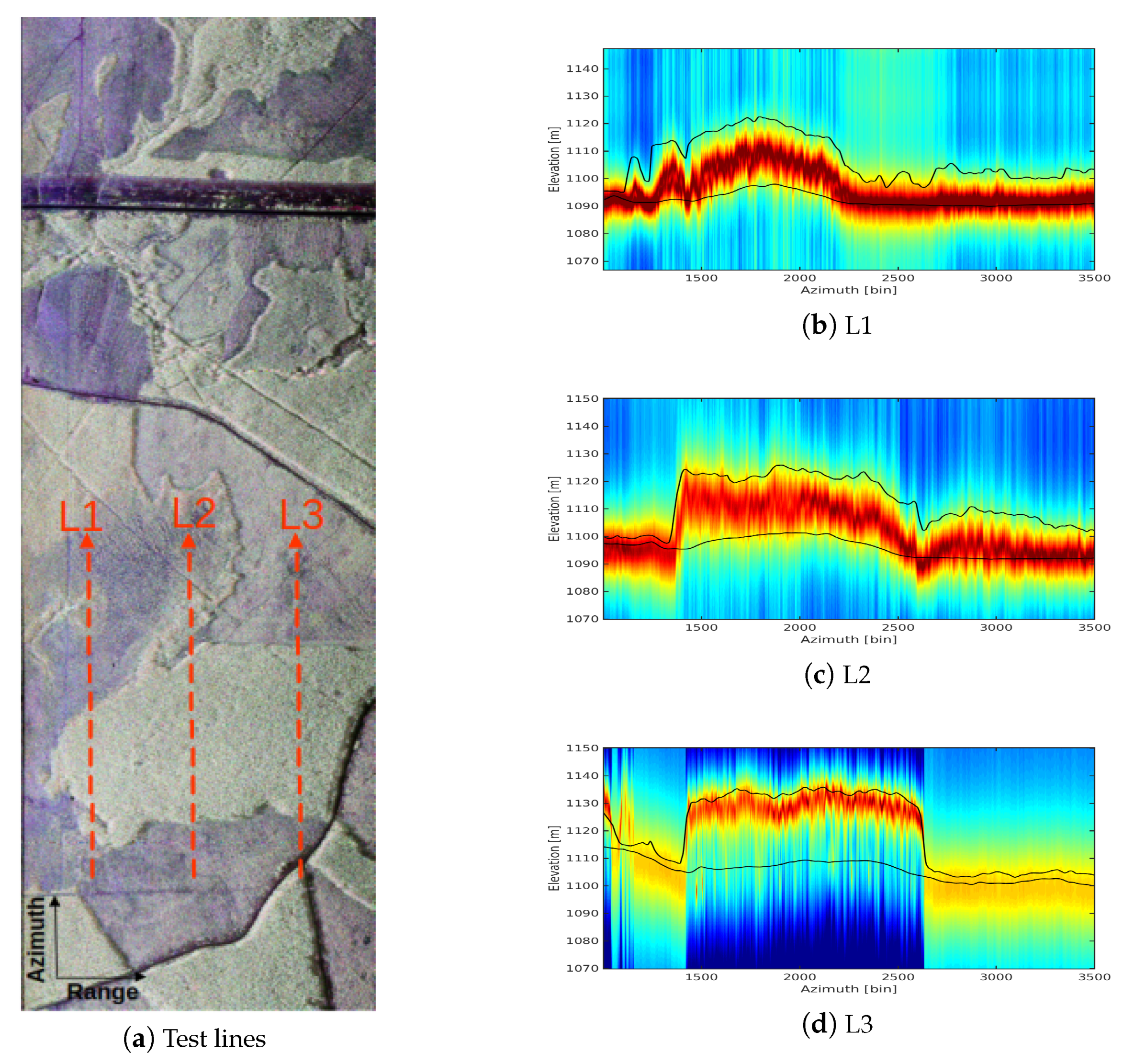
3.3. Proposed Solution Based on High-Resolution Spectral Analysis
3.3.1. Model Order Selection for Ground and Volume Separation
3.3.2. Tree Height Tomographic Estimation Approach
4. Forest/Non-Forest Mapping for Model Order Selection
5. Global Tomographic Processing over the Test Site
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| PolInSAR | Polarimetric Interferometric SAR |
| TomoSAR | SAR Tomography |
| DTM | Digital Terrain Model |
| DSM | Digital Surface Model |
References
- Frolking, S.; Palace, M.W.; Clark, D.B.; Chambers, J.Q.; Shugart, H.H.; Hurtt, G.C. Forest disturbance and recovery: A general review in the context of spaceborne remote sensing of impacts on aboveground biomass and canopy structure. J. Geophys. Res. Biogeosci. 2009, 114. [Google Scholar] [CrossRef]
- Treuhaft, R.; Siqueira, P. Vertical structure of vegetated land surfaces from interferometric and polarimetric radar. Radio Sci. 2000, 35, 141–178. [Google Scholar] [CrossRef] [Green Version]
- Papathanassiou, K.P.; Cloude, S.R. Single baseline polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2352–2363. [Google Scholar] [CrossRef] [Green Version]
- Cloude, S.R.; Papathanassiou, K.P. Three-stage inversion process for polarimetric SAR interferometry. IEE Proc. Radar Sonar Navig. 2003, 150, 125–134. [Google Scholar] [CrossRef] [Green Version]
- Tebaldini, S. Forest Structure Retrieval from Multi-Baseline SARs. In Remote Sensing of Biomass; Fatoyinbo, T., Ed.; IntechOpen: Rijeka, Croatia, 2012; Chapter 2. [Google Scholar]
- Pardini, M.; Papathanassiou, K. On the Estimation of Ground and Volume Polarimetric Covariances in Forest Scenarios with SAR Tomography. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1860–1864. [Google Scholar] [CrossRef] [Green Version]
- Ferro-Famil, L.; Huang, Y.; Pottier, E. Principles and Applications of Polarimetric SAR Tomography for the Characterization of Complex Environments. In VIII Hotine-Marussi Symposium on Mathematical Geodesy; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1–13. [Google Scholar] [CrossRef]
- Huang, Y.; Ferro-Famil, L.; Lardeux, C. Polarimetric SAR tomography of tropical forests at P and L-band. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 1373–1376. [Google Scholar]
- Li, X.; Liang, L.; Guo, H.; Huang, Y. Compressive Sensing for Multibaseline Polarimetric SAR Tomography of Forested Areas. IEEE Trans. Geosci. Remote Sens. 2016, 54, 153–166. [Google Scholar] [CrossRef]
- Aghababaei, H.; Ferraioli, G.; Ferro-Famil, L.; Huang, Y.; Mariotti D’Alessandro, M.; Pascazio, V.; Schirinzi, G.; Tebaldini, S. Forest SAR Tomography: Principles and Applications. IEEE Geosci. Remote Sens. Mag. 2020, 8, 30–45. [Google Scholar] [CrossRef]
- Huang, Y.; Levy-Vehel, J.; Ferro-Famil, L.; Reigber, A. Three-Dimensional Imaging of Objects Concealed Below a Forest Canopy Using SAR Tomography at L-Band and Wavelet-Based Sparse Estimation. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1454–1458. [Google Scholar] [CrossRef]
- Lee, S.; Pardini, M.; Kugler, F.; Papathanassiou, K.; Hajnsek, I. PolInSAR forest height inversion by means of L-band F-SAR data. PolInSAR Workshop 2013. [Google Scholar]
- Hajnsek, I.; Kugler, F.; Lee, S.K.; Papathanassiou, K.P. Tropical-Forest-Parameter Estimation by Means of Pol-InSAR: The INDREX-II Campaign. IEEE Trans. Geosc. Remote Sens. 2009, 47, 481–493. [Google Scholar] [CrossRef] [Green Version]
- Tebaldini, S.; Rocca, F. Multibaseline Polarimetric SAR Tomography of a Boreal Forest at P- and L-Bands. IEEE Trans. Geosci. Remote Sens. 2012, 50, 232–246. [Google Scholar] [CrossRef]
- Mercer, B.; Zhang, Q.; Schwaebisch, M.; Denbina, M. 3D Topography and Forest Recovery from An L-Band Single-Pass Airborne PolInSAR System. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009. [Google Scholar]
- Tebaldini, S. Algebraic Synthesis of Forest Scenarios From Multibaseline PolInSAR Data. IEEE Trans. Geosc. Remote Sens. 2009, 47, 4132–4142. [Google Scholar] [CrossRef]
- Huang, Y.; Ferro-Famil, L. 3-D Characterization of Urban Areas Using High-Resolution Polarimetric SAR Tomographic Techniques and a Minimal Number of Acquisitions. IEEE Trans. Geosci. Remote Sens. 2020, 1–18. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Chicago, IL, USA, 2008. [Google Scholar]
- Huang, Y.; Ferro-Famil, L.; Reigber, A. Under-Foliage Object Imaging Using SAR Tomography and Polarimetric Spectral Estimators. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2213–2225. [Google Scholar] [CrossRef] [Green Version]
- Stoica, P.; Nehorai, A. MUSIC, Maximum likelihood, and Cramer-Rao Bound: Further Results and Comparisons. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 2140–2150. [Google Scholar] [CrossRef]
- Nannini, M.; Scheiber, R.; Moreira, A. Estimation of the Minimum Number of Tracks for SAR Tomography. IEEE Trans. Geosc. Remote Sens. 2009, 47, 531–543. [Google Scholar] [CrossRef]
- Williams, M.; Pottier, E.; Ferro-Famil, L.; Allain, S.; Cloude, S.; Hajnsek, I.; Papathanassiou, K.; Moreira, A.; Minchella, A.; Desnos, Y.L. Forest Coherent SAR Simulation within PolSARPro: An Educational Toolbox for PolSAR and PolInSAR Data Processing. In Proceedings of the Asian Conference on Remote Sensing, Kuala Lumpur, Malaysia, 12–16 November 2007. [Google Scholar]
- Zhang, Q.; Huang, Y.; Schwaebisch, M.; Mercer, B.; Wei, M. Forest height estimation using single-pass dual-baseline L-band PolInSAR Data. In Proceedings of the 2012 IEEE international geoscience and remote sensing symposium, Munich, Germany, 22–27 July 2012. [Google Scholar]
- Cloude, S.R.; Papathanassiou, K.P. Polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1551–1565. [Google Scholar] [CrossRef]
- Ferro-Famil, L.; Lee, J.; Pottier, E. Unsupervised Classification of Natural Scenes from Polarimetric Interferometric SAR Data. In Frontiers of Remote Sensing Information Processing; World Scientific Publishing: Singapore, 2003. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
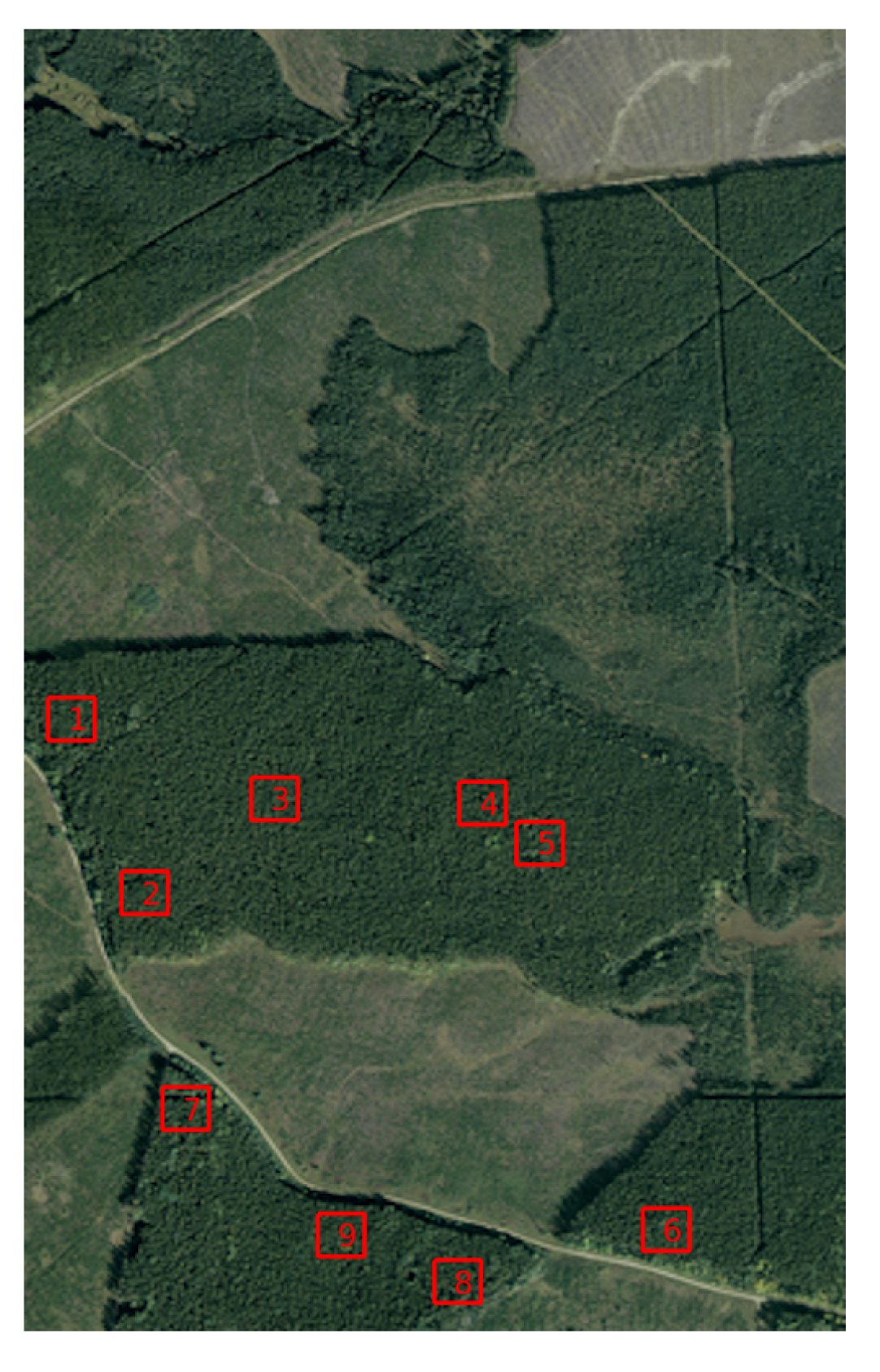
| ROI | (m) | (m) |
|---|---|---|
| 1 | 24.57 ± 2.59 | 26.39 ±0.72 |
| 2 | 22.40 ± 2.90 | 23.71 ± 0.77 |
| 3 | 19.32 ± 1.86 | 21.84 ± 0.38 |
| 4 | 18.10 ± 2.08 | 19.95 ± 0.42 |
| 5 | 20.58 ± 1.73 | 21.40 ± 0.72 |
| 6 | 21.68 ± 1.88 | 26.36 ± 0.58 |
| 7 | 20.80 ± 3.55 | 24.63 ± 0.94 |
| 8 | 24.33 ± 1.43 | 23.80 ± 1.21 |
| 9 | 19.54 ± 1.48 | 21.50 ± 0.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Zhang, Q.; Ferro-Famil, L. Forest Height Estimation Using a Single-Pass Airborne L-Band Polarimetric and Interferometric SAR System and Tomographic Techniques. Remote Sens. 2021, 13, 487. https://doi.org/10.3390/rs13030487
Huang Y, Zhang Q, Ferro-Famil L. Forest Height Estimation Using a Single-Pass Airborne L-Band Polarimetric and Interferometric SAR System and Tomographic Techniques. Remote Sensing. 2021; 13(3):487. https://doi.org/10.3390/rs13030487
Chicago/Turabian StyleHuang, Yue, Qiaoping Zhang, and Laurent Ferro-Famil. 2021. "Forest Height Estimation Using a Single-Pass Airborne L-Band Polarimetric and Interferometric SAR System and Tomographic Techniques" Remote Sensing 13, no. 3: 487. https://doi.org/10.3390/rs13030487
APA StyleHuang, Y., Zhang, Q., & Ferro-Famil, L. (2021). Forest Height Estimation Using a Single-Pass Airborne L-Band Polarimetric and Interferometric SAR System and Tomographic Techniques. Remote Sensing, 13(3), 487. https://doi.org/10.3390/rs13030487