UAV Based Estimation of Forest Leaf Area Index (LAI) through Oblique Photogrammetry


 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
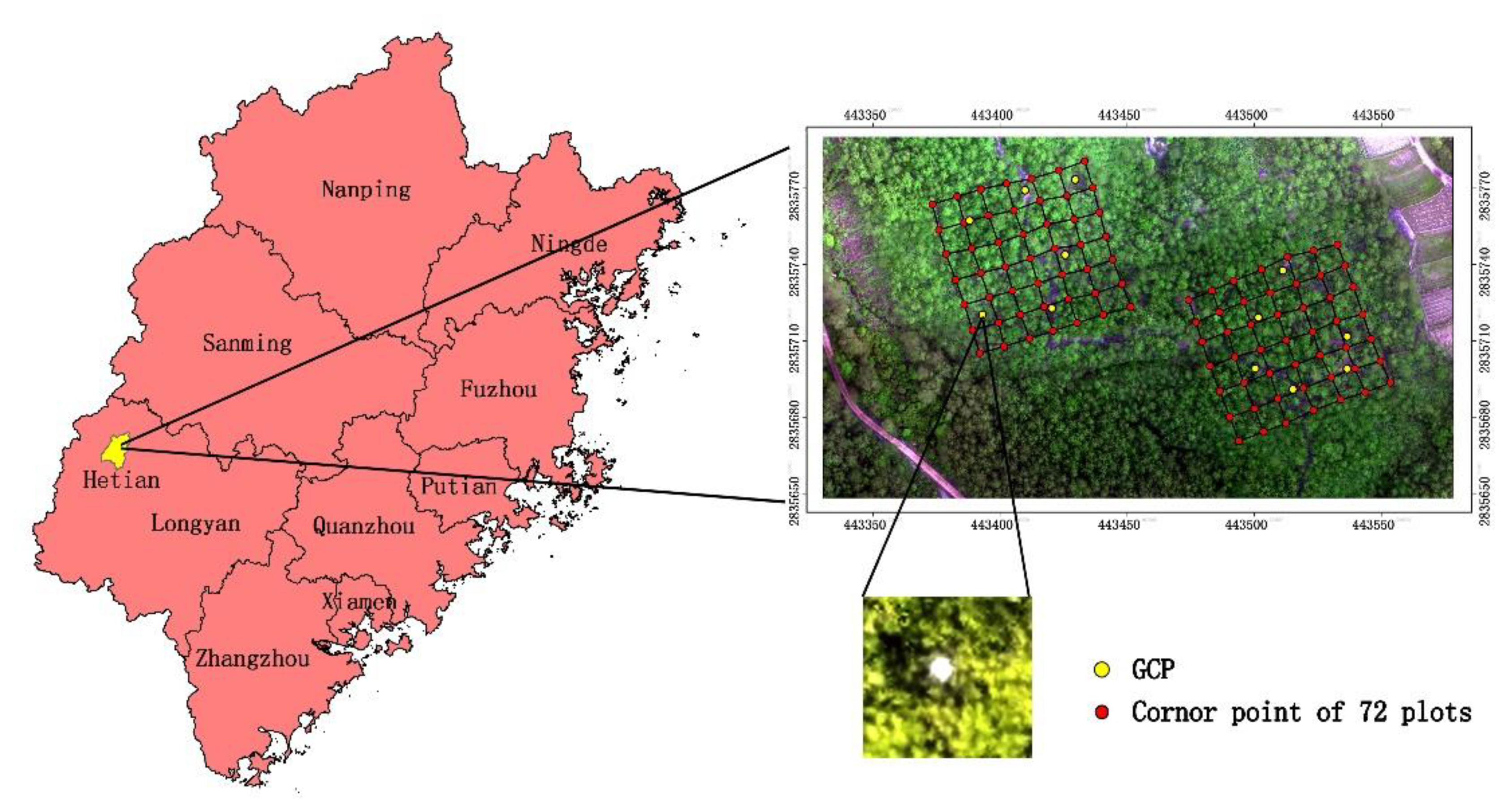
2.1. Overview of Study Region
2.2. UAV Parameters and Flight-Scheme Design
2.3. Methods
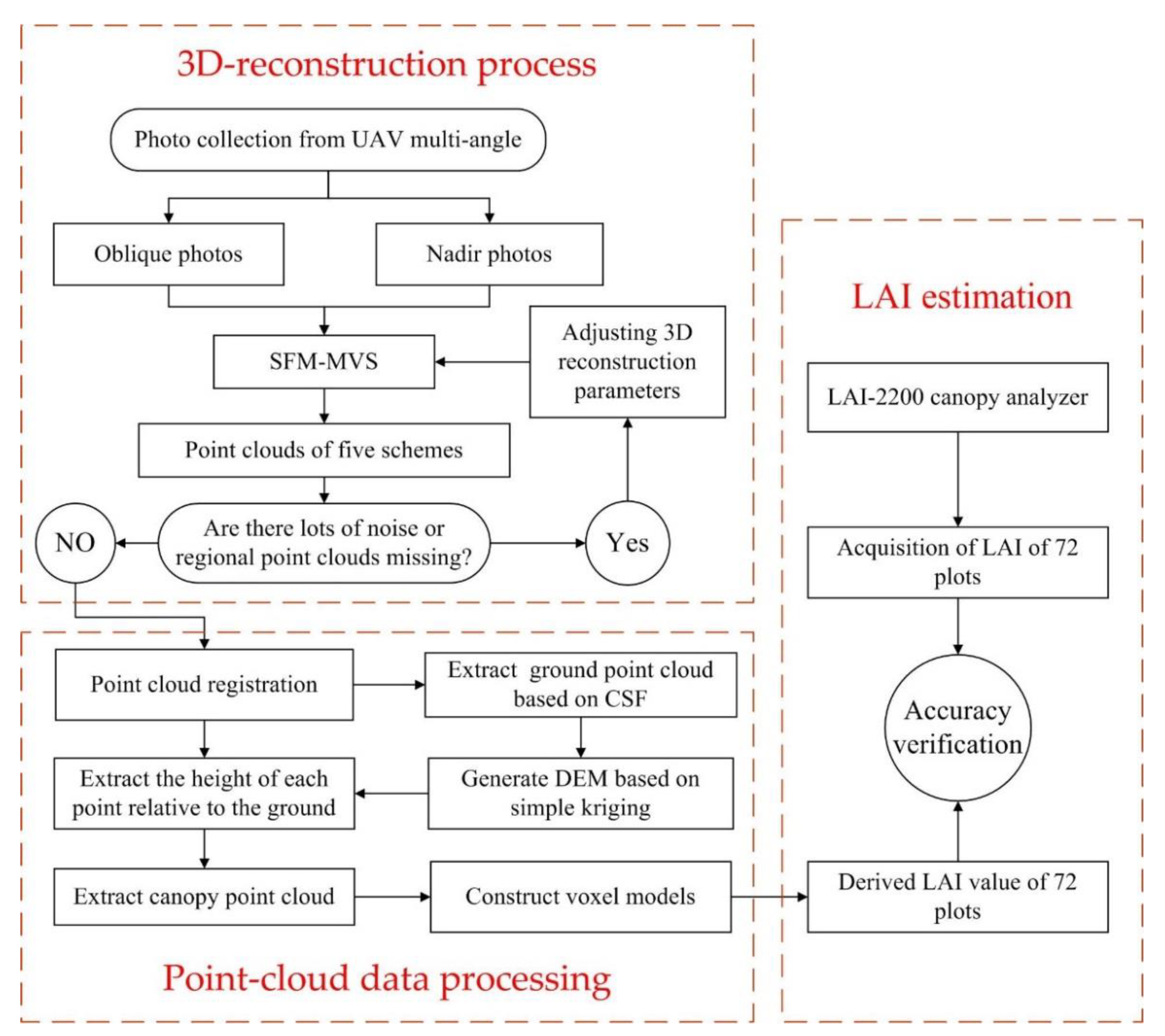
2.3.1. Three-Dimensional Reconstruction Process
2.3.2. Point-Cloud Data Processing
2.3.3. LAI Calculation Method
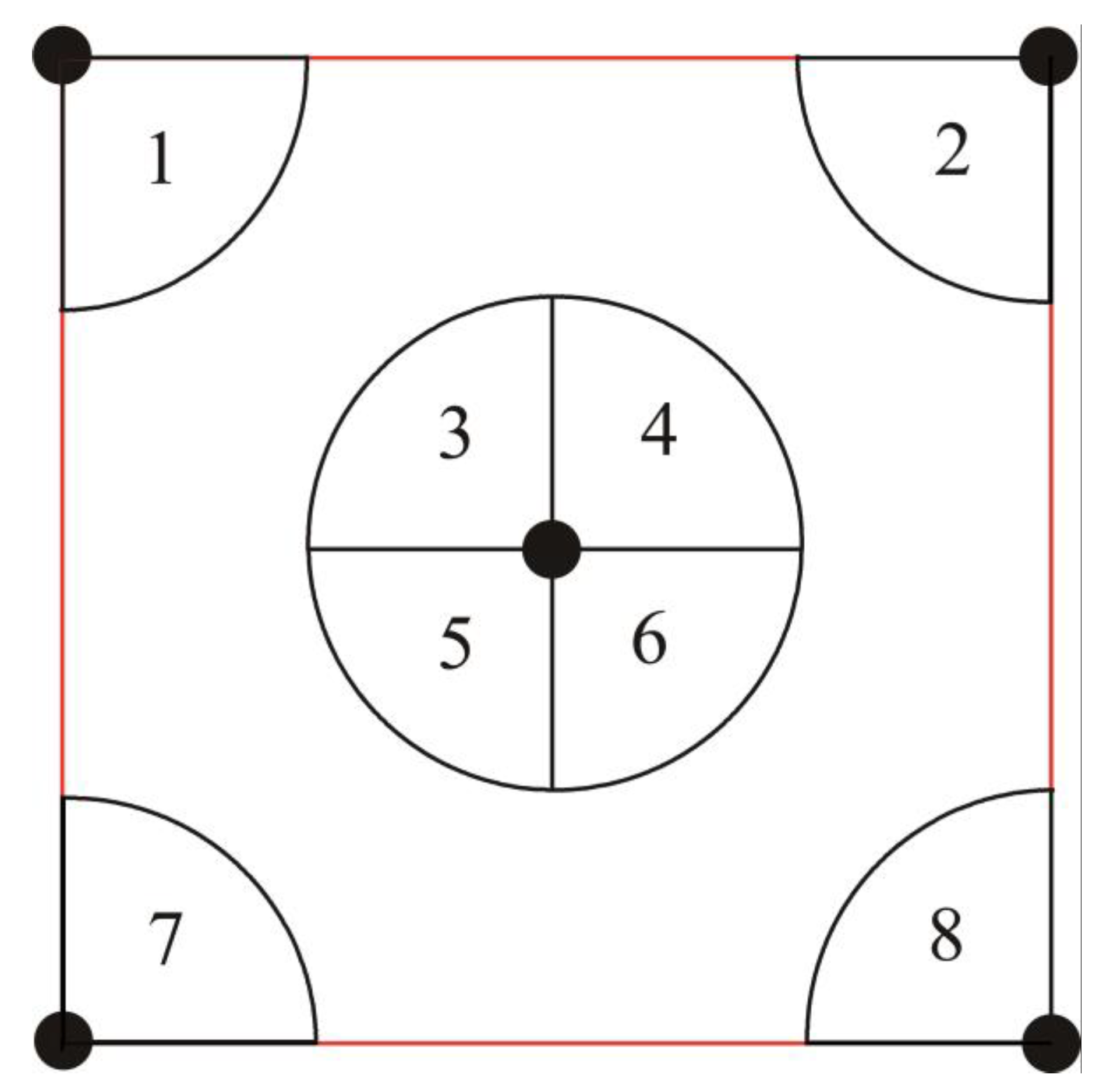
2.3.4. LAI Field Measurement
3. Results
3.1. Point Clouds Coordinates Accuracy Assessments
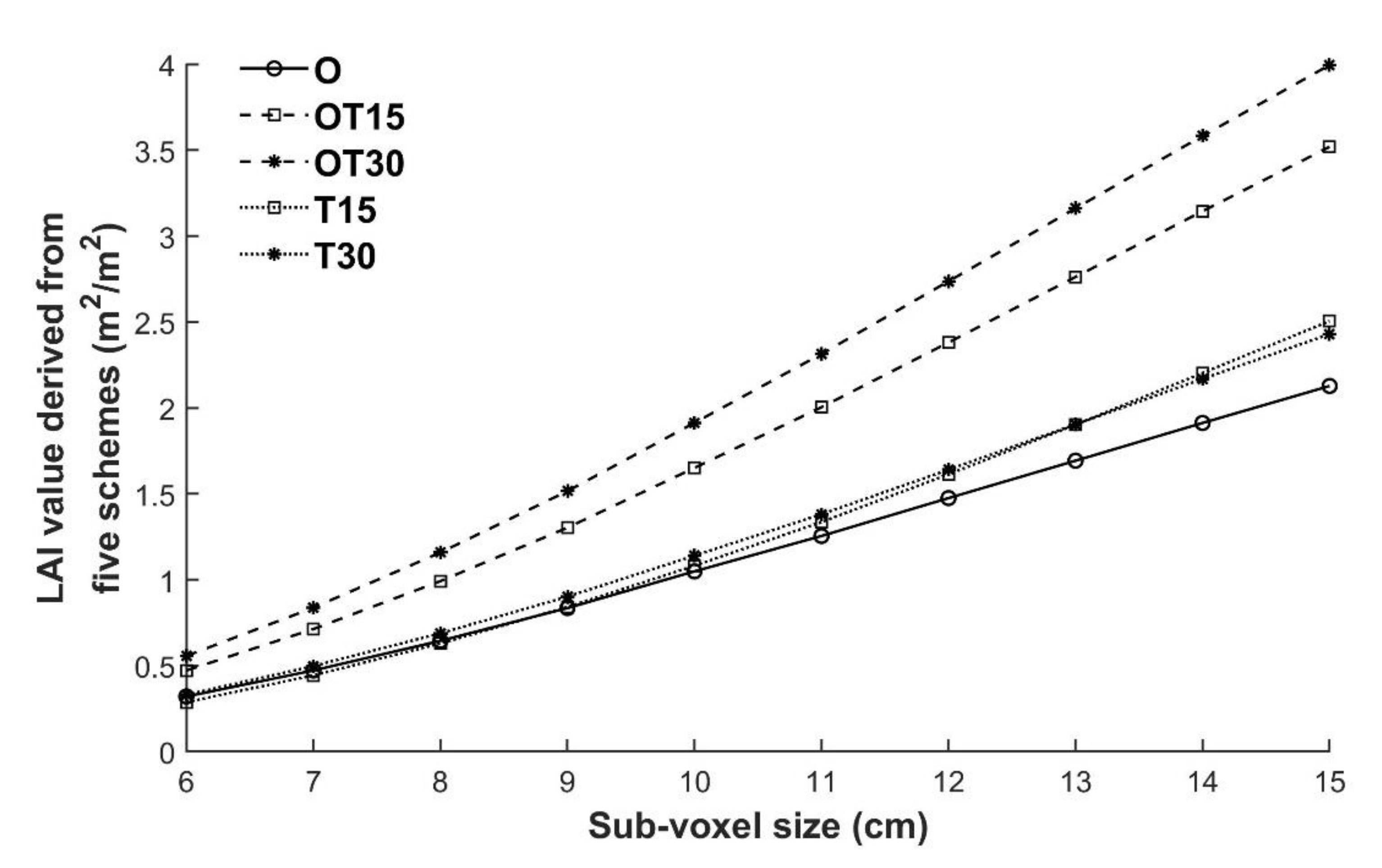
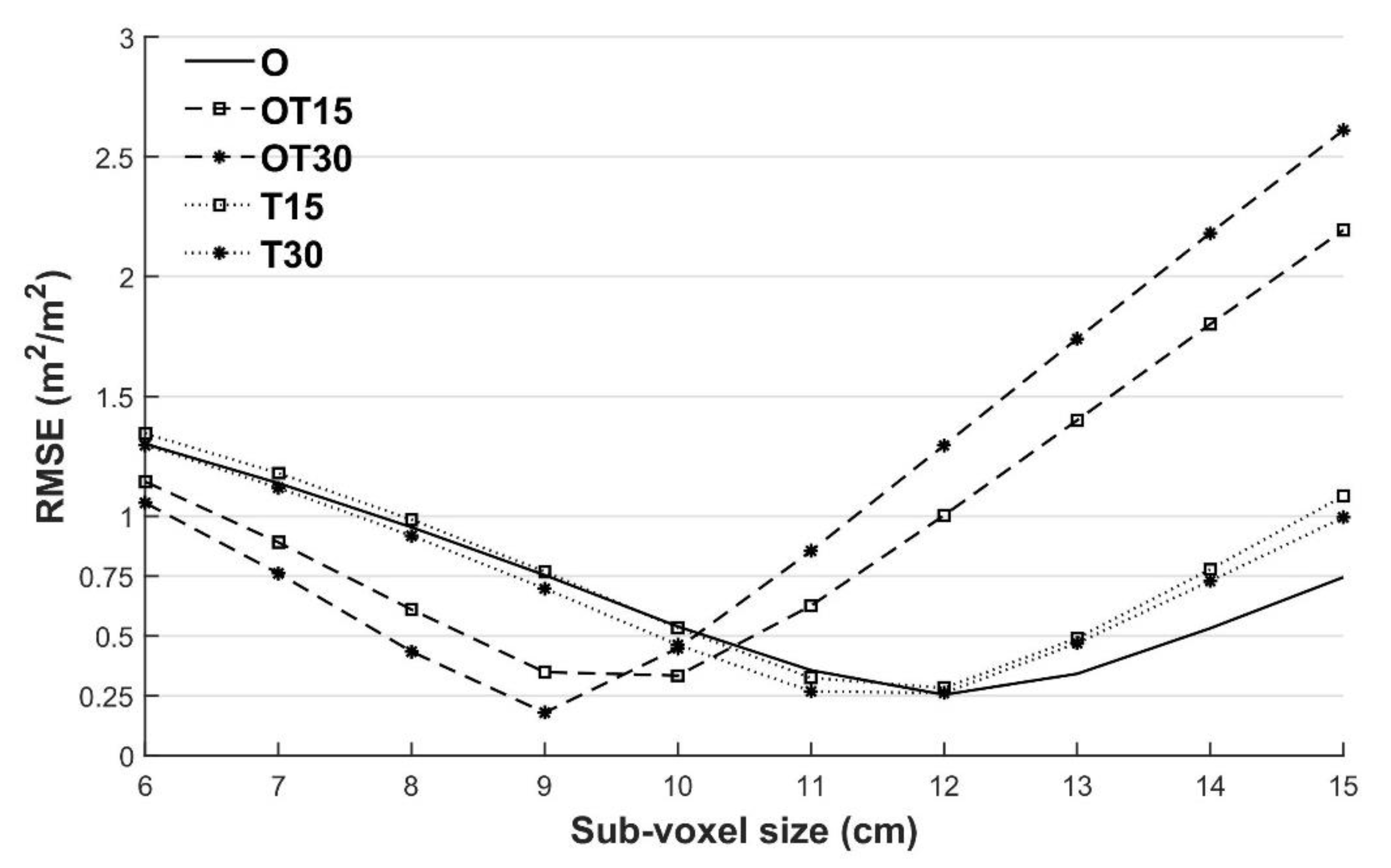
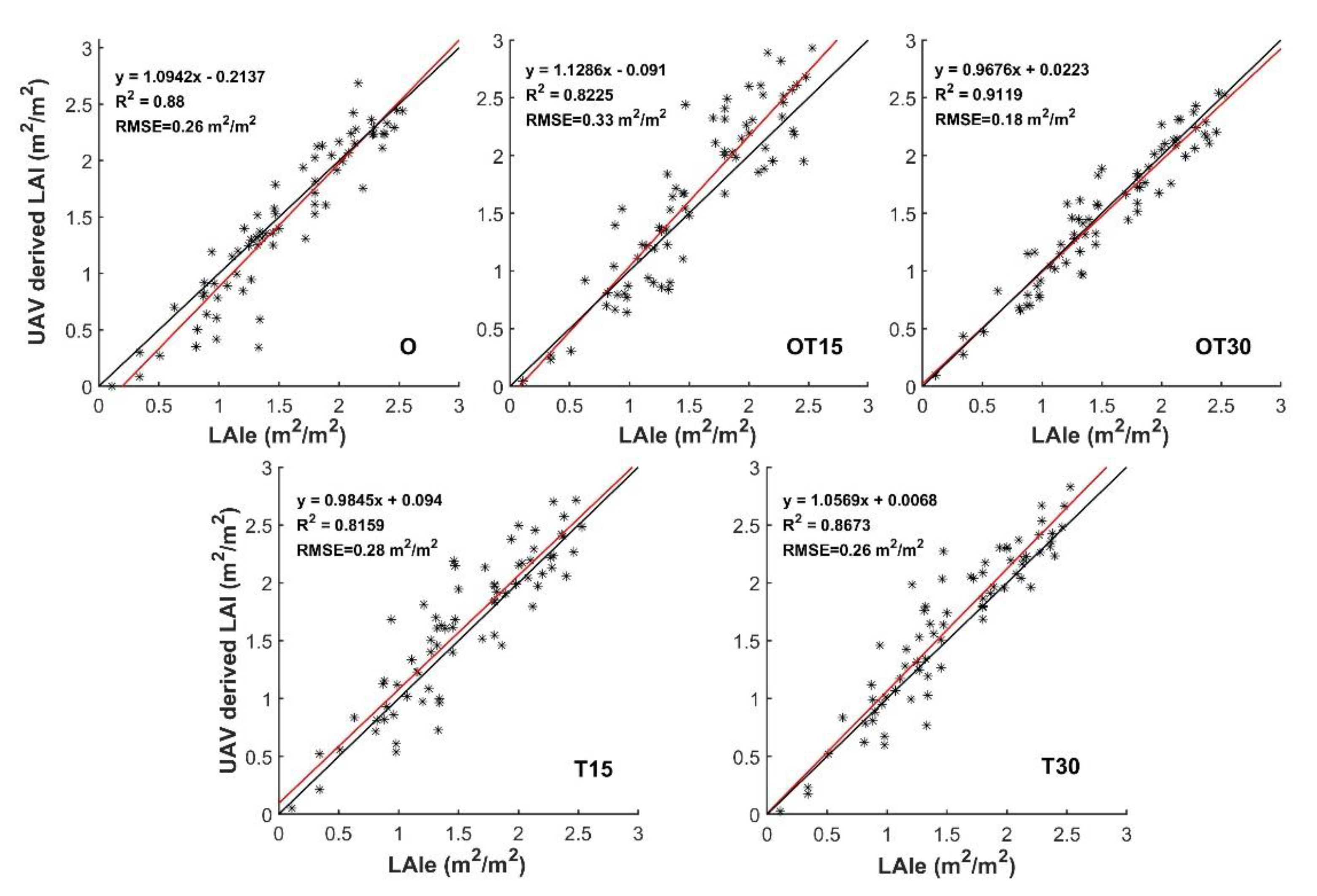
3.2. LAI Retrieval from Five Schemes
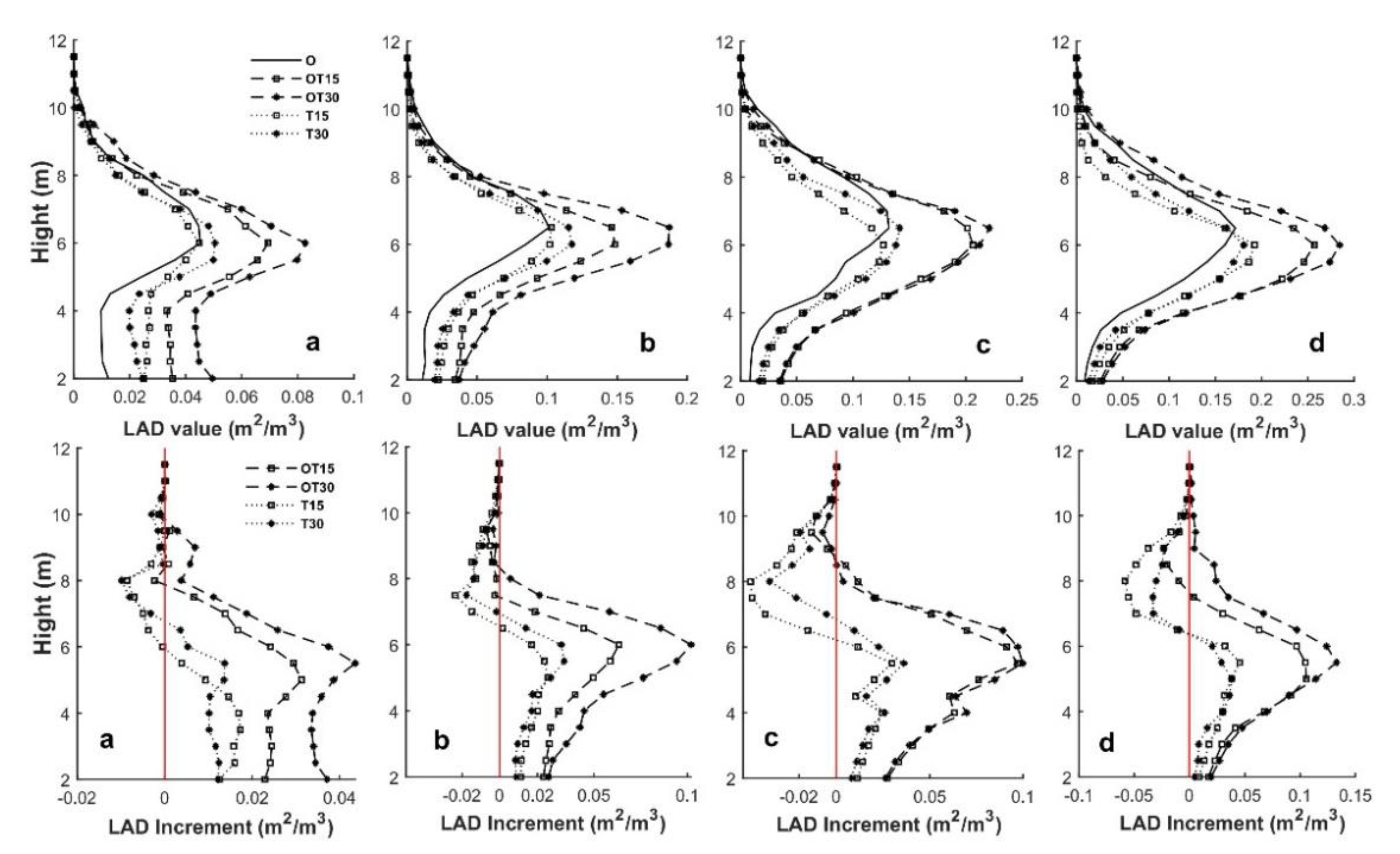
3.3. Leaf Area Distribution in Vertical Directions under the Same Sub-Voxel Size
4. Discussion
4.1. Three-Dimensional Reconstruction
4.2. Leaf Area Estimation
4.3. Limitation of this Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, J.M.; Chen, X.Y.; Ju, W.M.; Geng, X.Y. Distributed hydrological model for mapping evapotranspiration using remote sensing inputs. J. Hydrol. 2005, 305, 15–39. [Google Scholar] [CrossRef]
- Dietz, J.; Holscher, D.; Leuschner, C.; Hendrayanto, Y. Rainfall partitioning in relation to forest structure in differently managed montane forest stands in Central Sulawesi, Indonesia. Forest Ecol. Manag. 2006, 237, 170–178. [Google Scholar] [CrossRef]
- Cleugh, H.A.; Leuning, R.; Mu, Q.; Running, S.W. Regional evaporation estimates from flux tower and MODIS satellite data. Remote Sens. Environ. 2007, 106, 285–304. [Google Scholar] [CrossRef]
- Pierce, L.; Running, S. Rapid estimation of coniferous forest leaf area index using a portable integrating radiometer. Ecology 1988, 69, 1762–1767. [Google Scholar] [CrossRef]
- Hollinger, D.Y. Canopy organization and foliage photosynthetic capacity in a broad-leaved evergreen montane forest. Func. Ecol. 1989, 3, 53–62. [Google Scholar] [CrossRef]
- McWilliam, A.L.C.; Roberts, J.M.; Cabral, O.M.R.; Leitao, M.V.B.R.; Costa, A.C.L.; Maitelli, G.T.; Zamparoni, C.A.G.P. Leaf area index and above-ground biomass of terra firme rain forest and adjacent clearings in Amazonia. Func. Ecol. 1993, 7, 310–317. [Google Scholar] [CrossRef]
- Zheng, G.; Moskal, L.M. Retrieving leaf area index (LAI) using remote sensing: Theories, methods and sensors. Sensors 2009, 9, 2719–2745. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baret, F.; Guyot, G. Potentials and limits of vegetation indices for LAI and APAR assessment. Remote Sens. Environ. 1991, 35, 161–173. [Google Scholar] [CrossRef]
- Wulder, M.A.; Ledrew, E.F.; Franklin, S.E.; Lavigne, M.B. Aerial image texture information in the estimation of northern deciduous and mixed wood forest leaf area index (LAI). Remote Sens. Environ. 1998, 64, 64–76. [Google Scholar] [CrossRef]
- Hosoi, F.; Omasa, K. Factors contributing to accuracy in the estimation of the woody canopy leaf area density profile using 3D portable lidar imaging. J. Exp. Bot. 2007, 58, 3463–3473. [Google Scholar] [CrossRef] [Green Version]
- Oshio, H.; Asawa, T.; Hoyano, A.; Miyasaka, S. Estimation of the leaf area density distribution of individual trees using high-resolution and multi-return airborne LiDAR data. Remote Sens. Environ. 2015, 166, 116–125. [Google Scholar] [CrossRef]
- Liu, Y.Z.; Fu, Y.J.; Zhou, P.X.; Zhuan, Y.H.; Zhong, K.J.; Guan, B.L. A real-time 3 D shape measurement with color texture using a monochromatic camera. Opt. Commun. 2020, 474, 126088. [Google Scholar] [CrossRef]
- Wright, D.; Dering, B.; Martinovic, J.; Gheorghiu, E. Neural responses to dynamic adaptation reveal the dissociation between the processing of the shape of contours and textures. Cortex 2020, 127, 78–93. [Google Scholar] [CrossRef] [PubMed]
- Grumpe, A.; Belkhir, F.; Wöhler, C. Construction of lunar DEMs based on reflectance modelling. Adv. Space Res. 2014, 53, 1735–1767. [Google Scholar] [CrossRef]
- Liu, W.C.; Wu, B.; Wöhler, C. Effects of illumination differences on photometric stereo shape-and-albedo-from-shading for precision lunar surface reconstruction. ISPRS J. Photogramm. Remote Sens. 2018, 136, 58–72. [Google Scholar]
- Wu, B.; Liu, W.C.; Grumpe, A.; Wöhler, C. Construction of pixel-level resolution DEMs from monocular images by shape and albedo from shading constrained with low-resolution DEM. ISPRS J. Photogramm. Remote Sens. 2018, 140, 3–19. [Google Scholar] [CrossRef]
- White, L.; Alfarhan, M.; Ahmed, T.; Aiken, C. Structural and orientation analysis of 3 D virtual outcrop models. Abstr. Progr. Geol. Soc. Am. 2008, 40, 423–424. [Google Scholar]
- Meinen, U.; Robinson, T. Mapping erosion and deposition in an agricultural landscape: Optimization of UAV image acquisition schemes for SfM-MVS. Remote Sens. Environ. 2020, 239, 111666. [Google Scholar] [CrossRef]
- Morgenroth, J.; Gomez, C. Assessment of tree structure using a 3 D image analysis technique—A proof of concept. Urban For. Urban Green. 2014, 13, 198–203. [Google Scholar] [CrossRef]
- Gatziolis, D.; Lienard, J.F.; Vogs, A.; Strigui, N.S. 3 D tree dimensionality assessment using photogrammetry and small unmanned aerial vehicles. PLoS ONE 2015, 10, e0137765. [Google Scholar] [CrossRef] [Green Version]
- Méndez-Barroso, L.A.; Zárate-Valdez, J.L.; Robles-Morúa, A. Estimation of hydromorphological attributes of a small forested catchment by applying the Structure from Motion (SfM) approach. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 186–197. [Google Scholar] [CrossRef]
- Peña-Villasenín, S.; Gil-Docampo, M.; Ortiz-Sanz, J. Professional SfM and TLS vs. a simple SfM photogrammetry for 3 D modelling of rock art and radiance scaling shading in engraving detection. J. Cult. Herit. 2019, 37, 238–246. [Google Scholar] [CrossRef]
- Zhang, X.J.; Zhao, P.C.; Hu, Q.W.; Ai, M.Y.; Hu, D.T.; Li, J.Y. A UAV-based panoramic oblique photogrammetry (POP) approach using spherical projection. ISPRS J. Photogram. Rem. Sens. 2020, 159, 198–219. [Google Scholar] [CrossRef]
- Aicardi, I.; Chiabrando, F.; Grasso, N.; Lingua, A.; Noardo, F.; Spano, A. UAV photogrammetry with oblique images: First analysis on data acquisition and processing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 835–842. [Google Scholar] [CrossRef] [Green Version]
- Wu, B.; Xie, L.; Hu, H.; Zhu, Q.; Yau, E. Integration of aerial oblique imagery and terrestrial imagery for optimized 3 D modeling in urban areas. ISPRS J. Photogramm. Remote Sens. 2018, 139, 119–132. [Google Scholar] [CrossRef]
- Blanton, C.M.; Rockwell, T.K.; Gontz, A.; Kelly, J.T. Refining the spatial and temporal signatures of creep and co-seismic slip along the southern San Andreas Fault using very high resolution UAS imagery and SfM-derived topography, Coachella Valley, California. Geomorphology. 2020, 357, 107064. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry–merits, limits and developments. Earth Surf. Dyn. 2016, 4, 359–389. [Google Scholar] [CrossRef] [Green Version]
- Shi, X.Y.; Peng, J.J.; Li, J.P.; Yan, P.T.; Gong, H.Y. The Iterative Closest Point Registration Algorithm Based on the Normal Distribution Transformation. Procedia Comput. Sci. 2019, 147, 181–190. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Yang, A.X.; Wu, Z.Y.; Yang, F.L.; Su, D.P.; Ma, Y.; Zhao, D.N.; Qi, C. Filtering of airborne LiDAR bathymetry based on bidirectional cloth simulation. ISPRS J. Photogram. Rem. Sens. 2020, 163, 49–61. [Google Scholar] [CrossRef]
- Hosoi, F.; Omasa, K. Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning lidar. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3610–3618. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F.; Smith, G.J.; Jonckheere, I.; Coppin, P. Review of methods for in situ leaf area index (LAI) determination. Agric. For. Meteorol. 2004, 121, 37–53. [Google Scholar] [CrossRef]
- Lin, Y.; West, G. Retrieval of effective leaf area index (LAI) and leaf area density (LAD) profile at individual tree level using high density multi-return airborne LiDAR. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 150–158. [Google Scholar] [CrossRef]
- Ruzgienė, B.; Berteška, T.; Gečyte, S.; Jakubauskienė, E.; Aksamitauskas, V.Č. The surface modelling based on UAV Photogrammetry and qualitative estimation. Measurement 2015, 73, 619–627. [Google Scholar] [CrossRef]
- Mielcarek, M.; Kamińska, A.; Stereńczak, K. Digital Aerial Photogrammetry (DAP) and Airborne Laser Scanning (ALS) as Sources of Information about Tree Height: Comparisons of the Accuracy of Remote Sensing Methods for Tree Height Estimation. Remote Sens. 2020, 12, 1808. [Google Scholar] [CrossRef]
- Balenović, I.; Simic Milas, A.; Marjanović, H. A Comparison of Stand-Level Volume Estimates from Image-Based Canopy Height Models of Different Spatial Resolutions. Remote Sens. 2017, 9, 205. [Google Scholar] [CrossRef] [Green Version]
- Persia, M.; Barca, E.; Greco, R.; Marzulli, M.I.; Tartarino, P. Archival Aerial Images Georeferencing: A Geostatistically-Based Approach for Improving Orthophoto Accuracy with Minimal Number of Ground Control Points. Remote Sens. 2020, 12, 2232. [Google Scholar] [CrossRef]
- Thomas, O.; Stallings, C.; Wilkinson, B. Unmanned aerial vehicles can accurately, reliably, and economically compete with terrestrial mapping methods. J. Unmanned Veh. Syst. 2019, 8, 57–74. [Google Scholar] [CrossRef]
- Nolan, M.; Larsen, C.; Sturm, M. Mapping snow depth from manned aircraft on landscape scales at centimeter resolution using structure-from-motion photogrammetry. Cryosphere 2015, 9, 1445–1463. [Google Scholar] [CrossRef] [Green Version]
- Meesuk, V.; Vojinovic, Z.; Mynett, A.E. Extracting inundation patterns from flood watermarks with remote sensing SfM technique to enhance urban flood simulation: The case of Ayutthaya, Thailand. Comput. Environ. Urban. Syst. 2017, 64, 239–253. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned aerial vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef] [Green Version]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef] [Green Version]
- Pu, R.; Cheng, J. Mapping forest leaf area index using reflectance and textural information derived from WorldView-2 imagery in a mixed natural forest area in Florida, US. Int. J. Appl. Earth Obs. 2015, 42, 11–23. [Google Scholar] [CrossRef]
- Korhonen, L.; Korpela, I.; Heiskanen, J.; Maltamo, M. Airborne discrete-return LIDAR data in the estimation of vertical canopy cover, angular canopy closure and leaf area index. Remote Sens. Environ. 2011, 115, 1065–1080. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef] [Green Version]
- Yu, K.Y.; Yao, X.; Deng, Y.B.; Lai, Z.J.; Lin, L.C.; Liu, J. Effects of stand age on soil respiration in Pinus massoniana plantations in the hilly red soil region of Southern China. Catena 2019, 178, 313–321. [Google Scholar] [CrossRef]
- Morsdorf, F.; Kötz, B.; Meier, E.; Itten, K.I.; Allgöwer, B. Estimation of LAI and fractional cover from small footprint airborne laser scanning data based on gap fraction. Remote Sen. Environ. 2006, 104, 50–61. [Google Scholar] [CrossRef]
- Deng, Y.; Yu, K.; Yao, X.; Xie, Q.; Hsieh, Y.; Liu, J. Estimation of Pinus massoniana Leaf Area Using Terrestrial Laser Scanning. Forests 2019, 10, 660. [Google Scholar] [CrossRef] [Green Version]
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; van Aardt, J.; Kunneke, A.; Seifert, T. Influence of Drone Altitude, Image Overlap, and Optical Sensor Resolution on Multi-View Reconstruction of Forest Images. Remote Sens. 2019, 11, 1252. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| O | OT15 | OT30 | T15 | T30 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sub-Voxel Size (m) | a | b | R2 | a | b | R2 | a | b | R2 | a | b | R2 | a | b | R2 |
| 0.06 | 0.25 | −0.06 | 0.87 | 0.34 | −0.05 | 0.82 | 0.37 | −0.01 | 0.91 | 0.19 | 0.00 | 0.83 | 0.23 | −0.02 | 0.87 |
| 0.07 | 0.36 | −0.09 | 0.87 | 0.51 | −0.07 | 0.82 | 0.55 | −0.01 | 0.91 | 0.29 | 0.00 | 0.82 | 0.34 | −0.03 | 0.87 |
| 0.08 | 0.49 | −0.11 | 0.87 | 0.70 | −0.08 | 0.82 | 0.75 | 0.00 | 0.91 | 0.40 | 0.01 | 0.82 | 0.46 | −0.03 | 0.87 |
| 0.09 | 0.63 | −0.14 | 0.88 | 0.90 | −0.09 | 0.82 | 0.97 | 0.02 | 0.91 | 0.53 | 0.02 | 0.82 | 0.60 | −0.02 | 0.87 |
| 0.10 | 0.79 | −0.17 | 0.88 | 1.13 | −0.09 | 0.82 | 1.21 | 0.05 | 0.91 | 0.68 | 0.04 | 0.82 | 0.75 | −0.02 | 0.87 |
| 0.11 | 0.94 | −0.19 | 0.88 | 1.35 | −0.08 | 0.82 | 1.43 | 0.10 | 0.91 | 0.83 | 0.06 | 0.82 | 0.90 | 0.00 | 0.87 |
| 0.12 | 1.09 | −0.21 | 0.88 | 1.58 | −0.06 | 0.82 | 1.67 | 0.17 | 0.90 | 0.98 | 0.09 | 0.82 | 1.05 | 0.02 | 0.87 |
| 0.13 | 1.25 | −0.23 | 0.88 | 1.81 | −0.02 | 0.82 | 1.89 | 0.24 | 0.90 | 1.14 | 0.14 | 0.81 | 1.20 | 0.05 | 0.87 |
| 0.14 | 1.40 | −0.25 | 0.88 | 2.02 | 0.03 | 0.81 | 2.11 | 0.33 | 0.90 | 1.31 | 0.18 | 0.81 | 1.35 | 0.09 | 0.86 |
| 0.15 | 1.54 | −0.26 | 0.88 | 2.22 | 0.09 | 0.81 | 2.31 | 0.43 | 0.89 | 1.47 | 0.24 | 0.81 | 1.49 | 0.13 | 0.86 |
| Sub-Voxel Size (m) | RMSE (m2/m2) | ||||
|---|---|---|---|---|---|
| O | OT15 | OT30 | T15 | T30 | |
| 0.06 | 1.3009 | 1.1429 | 1.0558 | 1.3437 | 1.2954 |
| 0.07 | 1.1370 | 0.8897 | 0.7603 | 1.1786 | 1.1176 |
| 0.08 | 0.9529 | 0.6093 | 0.4334 | 0.9844 | 0.9168 |
| 0.09 | 0.7531 | 0.3480 | 0.1790 | 0.7671 | 0.6967 |
| 0.10 | 0.5386 | 0.3333 | 0.4471 | 0.5323 | 0.4617 |
| 0.11 | 0.3558 | 0.6249 | 0.8542 | 0.3243 | 0.2677 |
| 0.12 | 0.2538 | 1.0027 | 1.2946 | 0.2824 | 0.2609 |
| 0.13 | 0.3410 | 1.3995 | 1.7398 | 0.4890 | 0.4691 |
| 0.14 | 0.5309 | 1.8011 | 2.1802 | 0.7770 | 0.7286 |
| 0.15 | 0.7443 | 2.1943 | 2.6115 | 1.0836 | 0.9948 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, L.; Yu, K.; Yao, X.; Deng, Y.; Hao, Z.; Chen, Y.; Wu, N.; Liu, J. UAV Based Estimation of Forest Leaf Area Index (LAI) through Oblique Photogrammetry. Remote Sens. 2021, 13, 803. https://doi.org/10.3390/rs13040803
Lin L, Yu K, Yao X, Deng Y, Hao Z, Chen Y, Wu N, Liu J. UAV Based Estimation of Forest Leaf Area Index (LAI) through Oblique Photogrammetry. Remote Sensing. 2021; 13(4):803. https://doi.org/10.3390/rs13040803
Chicago/Turabian StyleLin, Lingchen, Kunyong Yu, Xiong Yao, Yangbo Deng, Zhenbang Hao, Yan Chen, Nankun Wu, and Jian Liu. 2021. "UAV Based Estimation of Forest Leaf Area Index (LAI) through Oblique Photogrammetry" Remote Sensing 13, no. 4: 803. https://doi.org/10.3390/rs13040803
APA StyleLin, L., Yu, K., Yao, X., Deng, Y., Hao, Z., Chen, Y., Wu, N., & Liu, J. (2021). UAV Based Estimation of Forest Leaf Area Index (LAI) through Oblique Photogrammetry. Remote Sensing, 13(4), 803. https://doi.org/10.3390/rs13040803