
Determination of Process Noise for Underwater Target Tracking with Forward Looking Sonar



Abstract
:
1. Introduction
2. Research Background
2.1. Sensor Systems for Underwater Anti-Collision
2.2. Target Tracking in Sonar Anti-Collision
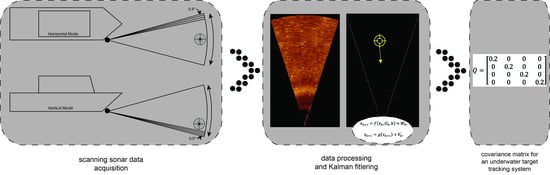
2.3. The KF Structure for Sonar Target Tracking
2.4. Process Noise Models
3. Materials and Methods
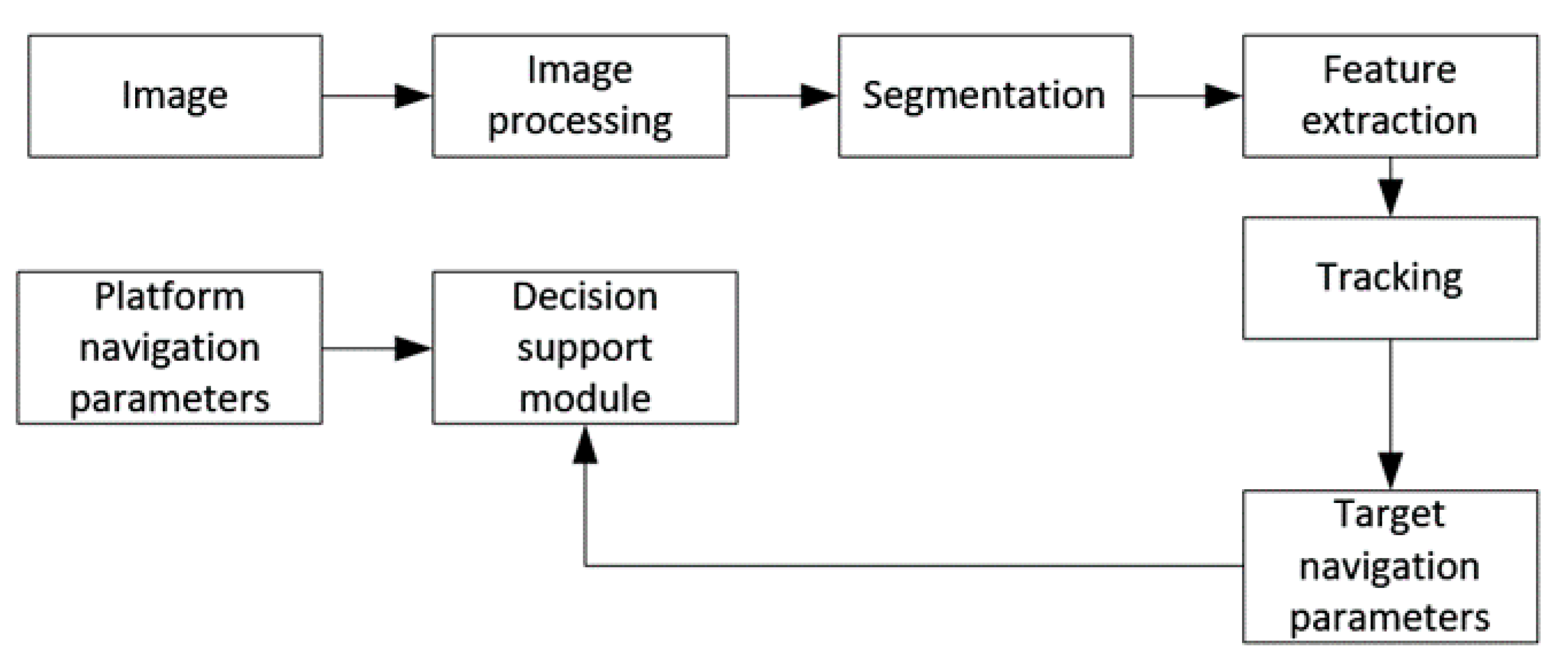
3.1. Research Equipment
3.2. Research Scenarios
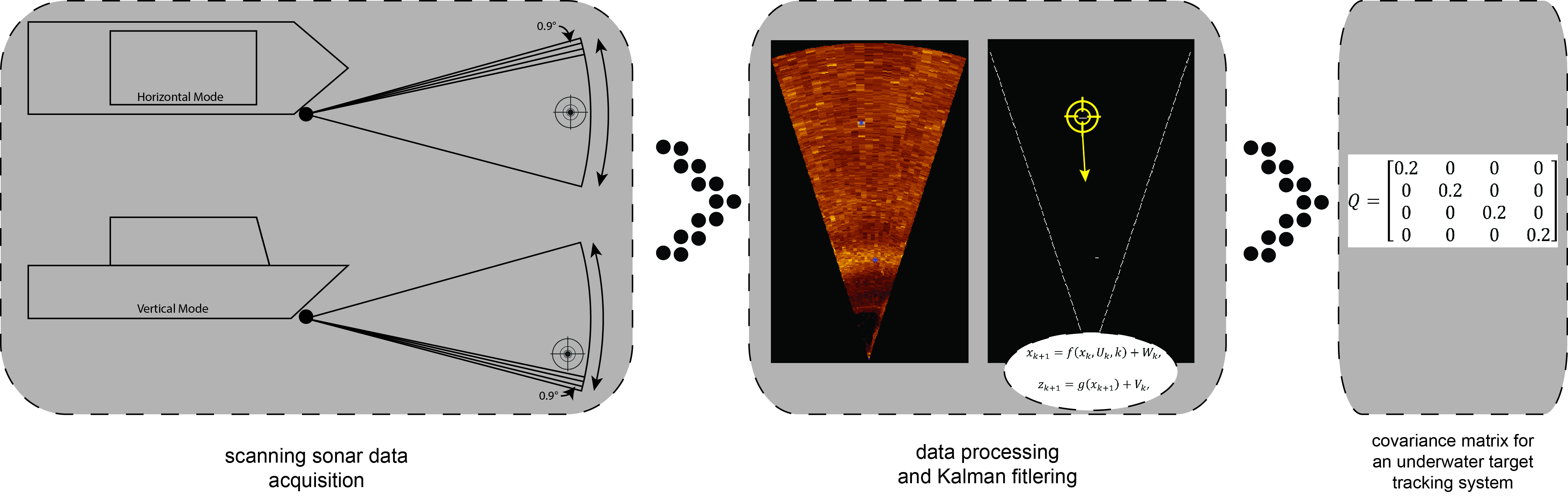
3.3. Data Evaluation
- σx2—variance in the x direction (easting);
- σy2—variance in the y direction (northing);
- σVx2—variance of speed in the x direction;
- σVy2—variance of the related speed in the y direction.
4. Results
4.1. Theoretical Analyses
- environmental issues affecting the movement of the target in the water, for example, positional variations due to current, waves, and drift;
- environmental issues affecting the carrying platform, for example, position, course, and speed variations;
- errors in the navigational instruments on the carrying platform, for example, position, course, and speed variations;
- errors of sonar measurements, for example, target position variation;
- feature extraction algorithm errors, for example, target position variation.
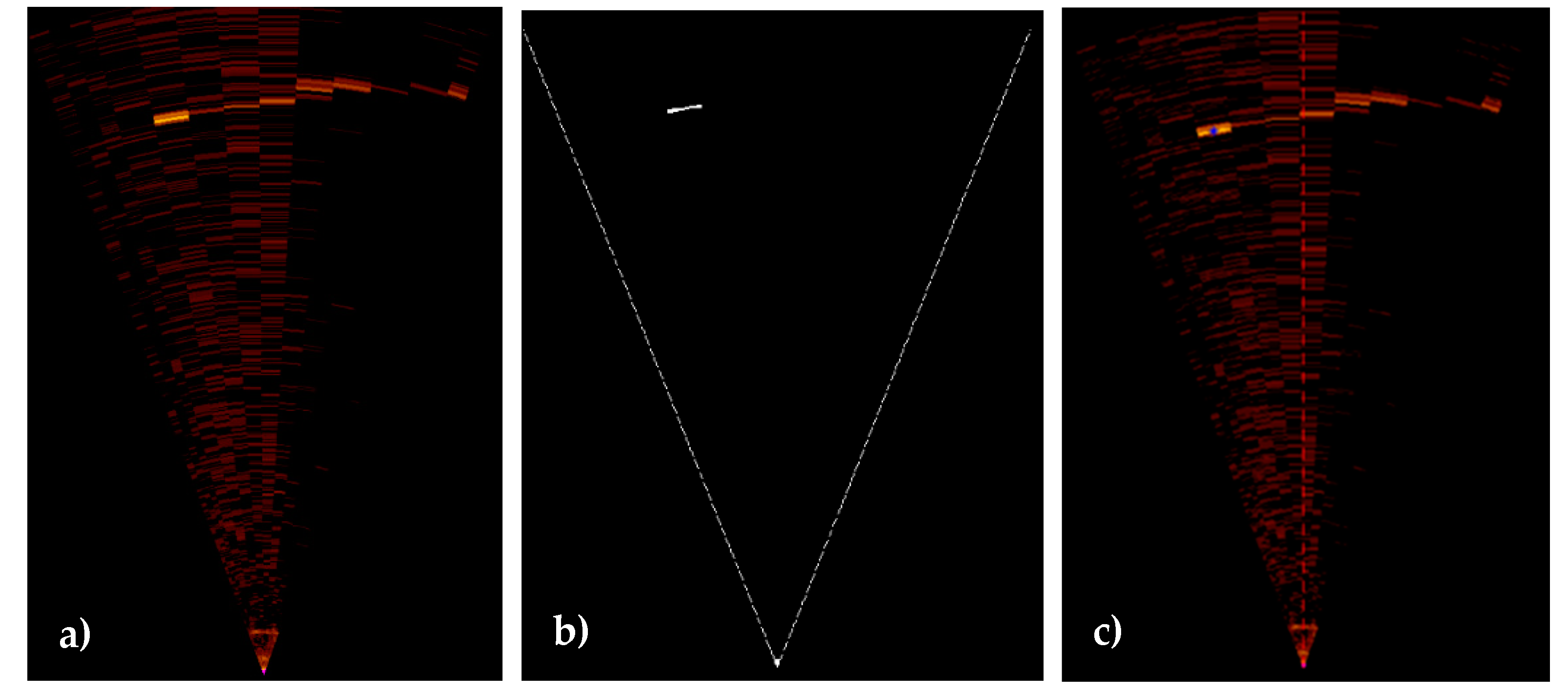
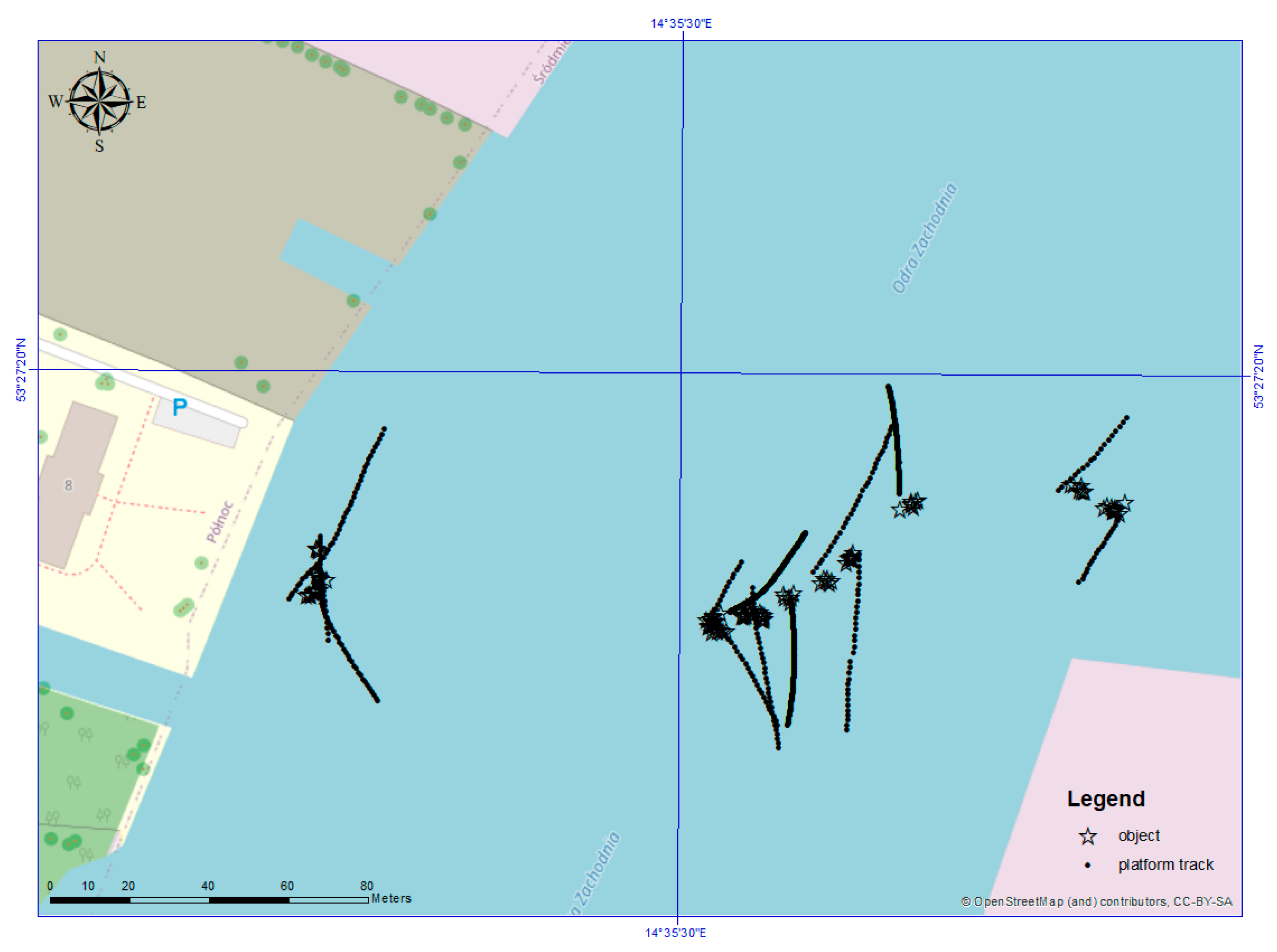
4.2. Empirical Research
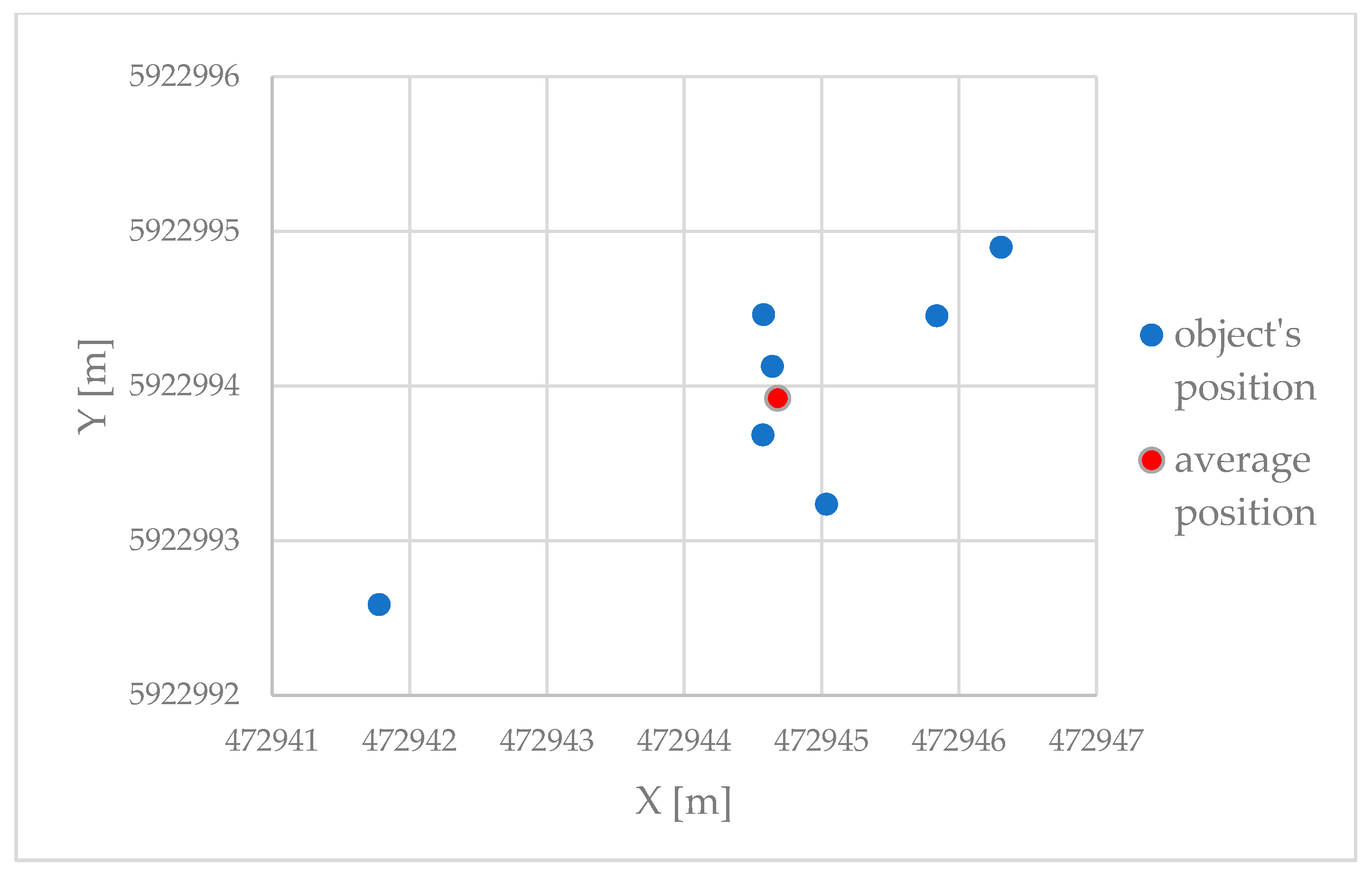
4.2.1. Positional Deviation of the Object from the Mean Value
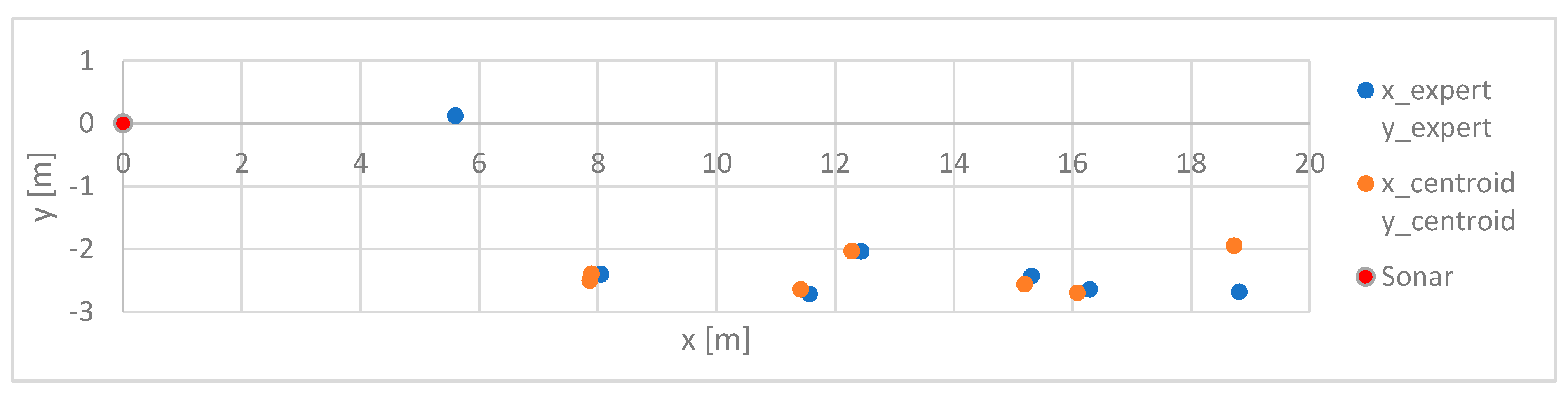
4.2.2. Deviations between Centroids and the Expert Position
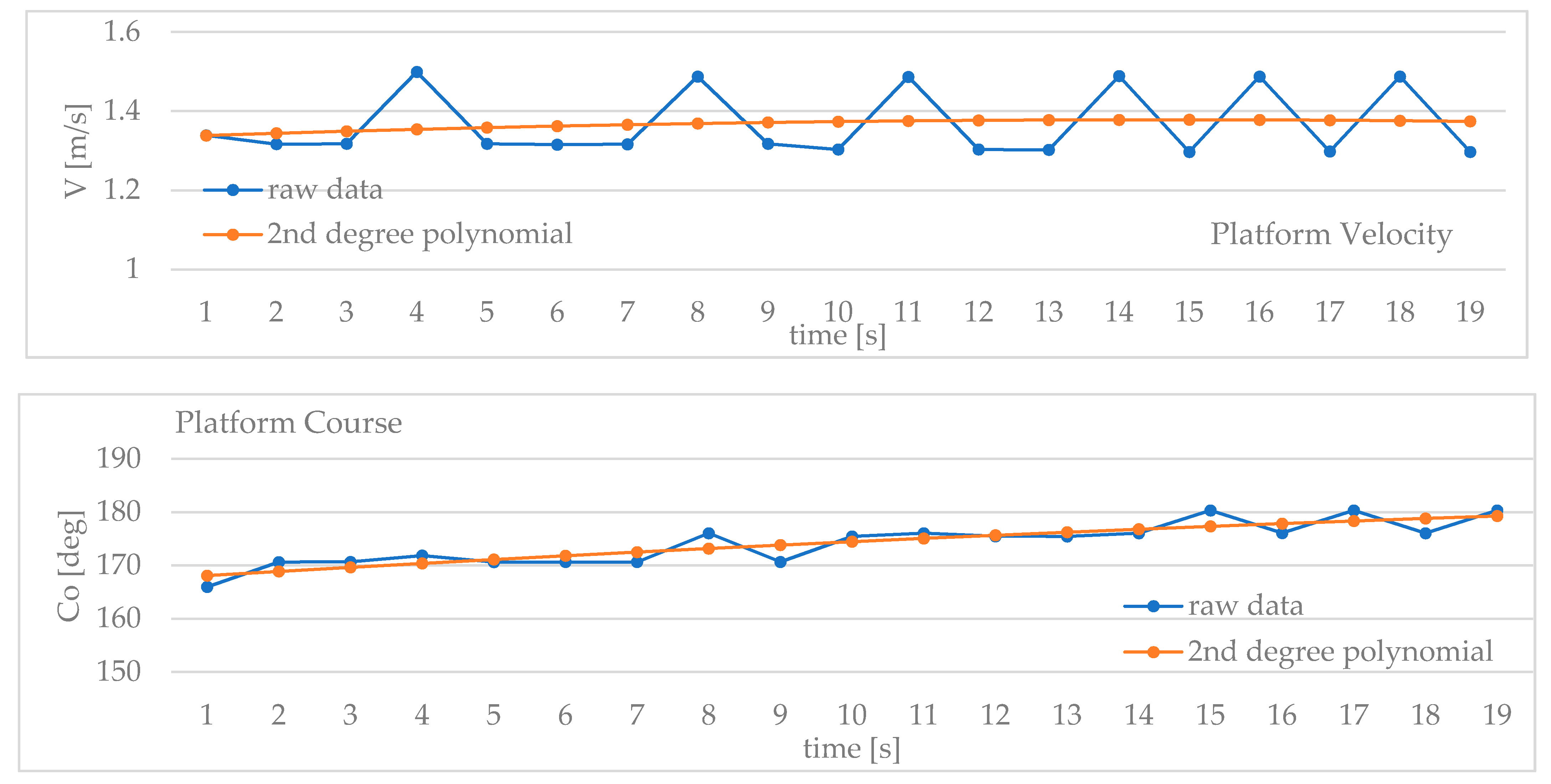
4.2.3. The Track Deviation of the Platform
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Modalavalasa, N.; Rao, G.S.; Prasad, K.S. An Efficient Implementation of Tracking Using Kalman Filter for Underwater Robot Application. Int. J. Comput. Sci. Eng. Inf. Technol. 2012, 2. [Google Scholar] [CrossRef]
- Stateczny, A.; Błaszczak-Bąk, W.; Sobieraj-Żłobińska, A.; Motyl, W.; Wisniewska, M. Methodology for Processing of 3D Multibeam Sonar Big Data for Comparative Navigation. Remote Sens. 2019, 11, 2245. [Google Scholar] [CrossRef] [Green Version]
- Luo, J.; Han, Y.; Fan, L. Underwater Acoustic Target Tracking: A Review. Sensors 2018, 18, 112. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peyvandi, H.; Farrokhrooz, M.; Roufarshbaf, H.; Park, S.J. SONAR systems and underwater signal processing: Classic and modern approaches. SONAR Syst. 2011, 173–206. [Google Scholar] [CrossRef] [Green Version]
- Stateczny, A.; Kazimierski, W.; Gronska-Sledz, D.; Motyl, W. The Empirical Application of Automotive 3D Radar Sensor for Target Detection for an Autonomous Surface Vehicle’s Navigation. Remote Sens. 2019, 11, 1156. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Zhang, J.; Zhang, H.; Yan, Z. A Predictive Guidance Obstacle Avoidance Algorithm for AUV in Unknown Environments. Sensors 2019, 19, 2862. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stateczny, A.; Gronska-Sledz, D.; Motyl, W. Precise Bathymetry as a Step Towards Producing Bathymetric Electronic Navigational Charts for Comparative (Terrain Reference) Navigation. J. Navig. 2019. [Google Scholar] [CrossRef]
- Wlodarczyk-Sielicka, M.; Stateczny, A. Selection of SOM Parameters for the Needs of Clusterisation of Data Obtained by Interferometric Methods. In Proceedings of the 16th International Radar Symposium (IRS), International Radar Symposium Proceedings, Dresden, Germany, 24–26 June 2015; Rohling, H., Ed.; 2015; pp. 1129–1134. [Google Scholar]
- Kumar, D.R.; Rao, S.K.; Raju, K.P. Integrated Unscented Kalman filter for underwater passive target tracking with towed array measurements. Optik-Int. J. Light Electron Optics 2016, 127, 2840–2847. [Google Scholar] [CrossRef]
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef] [Green Version]
- Wawrzyniak, N.; Stateczny, A. MSIS Image Positioning in Port Areas with the Aid of Comparative Navigation Methods. Pol. Marit. Res. 2017, 24, 32–41. [Google Scholar] [CrossRef] [Green Version]
- Wawrzyniak, N.; Włodarczyk-Sielicka, M.; Stateczny, A. MSIS sonar image segmentation method based on underwater viewshed analysis and high-density seabed model. In Proceedings of the 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017; pp. 1–9. [Google Scholar]
- Rao, S.K.; Murthy, K.L.; Rajeswari, K.R. Data fusion for underwater target tracking. IET Radar Sonar Navig. 2010, 4, 576–585. [Google Scholar] [CrossRef]
- Mandić, F.; Rendulić, I.; Mišković, N.; Nađ, Đ. Underwater object tracking using sonar and USBL measurements. J. Sens. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Deng, Z.-C.; Yu, X.; Qin, H.-D.; Zhu, Z.-B. Adaptive Kalman Filter-Based Single-Beacon Underwater Tracking with Unknown Effective Sound Velocity. Sensors 2018, 18, 4339. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kraeutner, P.; Brumley, B.; Guo, H.; Giesemann, J. Rethinking forward-looking sonar for AUV’s: Combining horizontal beamforming with vertical angle-of-arrival estimation. In Proceedings of the IEEE OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–7. [Google Scholar] [CrossRef]
- Karabchevsky, S.; Braginsky, B.; Guterman, H. AUV real-time acoustic vertical plane obstacle detection and avoidance. In Proceedings of the 2012 IEEE/OES Autonomous Underwater Vehicles (AUV), Southampton, UK, 24–27 September 2012; pp. 1–6. [Google Scholar]
- Quidu, I.; Bertholom, A.; Dupas, Y. Ground obstacle tracking on forward looking sonar images. In Proceedings of the 10th European Conference on Underwater Acoustics. (ECUA’10), Istanbul, Turkey, 5–9 July 2010. [Google Scholar]
- Li, W.; Li, Y.; Ren, S.; Feng, X. Tracking an underwater maneuvering target using an adaptive Kalman filter. In Proceedings of the 2013 IEEE International Conference of IEEE Region 10 (TENCON 2013), Xi’an, China, 22–25 October 2013; pp. 1–4. [Google Scholar]
- Clark, D.E.; Bell, J.; de Saint-Pern, Y.; Petillot, Y. PHD filter multi-target tracking in 3D sonar. In Proceedings of the IEEE/Europe Oceans 2005, Brest, France, 20–23 June 2005; Volume 1, pp. 265–270. [Google Scholar]
- Son, H.S.; Park, J.B.; Joo, Y.H. The study on tracking algorithm for the underwater target: Applying to noise limited bi-static sonar model. In Proceedings of the 2013 9th Asian Control Conference (ASCC), Istanbul, Turkey, 23–26 June 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Kazimierski, W.; Zaniewicz, G. Analysis of the possibility of using radar tracking method based on GRNN for processing sonar spatial data. In Rough Sets and Intelligent Systems Paradigms; Springer: Cham, Switzerland, 2014; pp. 319–326. [Google Scholar]
- Isbitiren, G.; Akan, O.B. Three-dimensional underwater target tracking with acoustic sensor networks. IEEE Trans. Veh. Technol. 2011, 60, 3897–3906. [Google Scholar] [CrossRef]
- Karoui, I.; Quidu, I.; Legris, M. Automatic sea-surface obstacle detection and tracking in forward-looking sonar image sequences. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4661–4669. [Google Scholar] [CrossRef]
- Poostpasand, M.; Javidan, R. An adaptive target tracking method for 3D underwater wireless sensor networks. Wirel. Netw. 2018, 24, 2797–2810. [Google Scholar] [CrossRef]
- Stateczny, A. (Ed.) Radar Navigation; Scientific Society of Gdansk: Gdansk, Poland, 2011. (In Polish) [Google Scholar]
- Stateczny, A. Neural manoeuvre detection of the tracked target in ARPA systems. IFAC Proc. Vol. 2001, 34, 209–214. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Solomon, C.; Breckon, T. Fundamentals of Digital Image Processing: A Practical Approach with Examples in Matlab; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Specht, M.; Specht, C.; Lasota, H.; Cywiński, P. Assessment of the Steering Precision of a Hydrographic Unmanned Surface Vessel (USV) along Sounding Profiles Using a Low-Cost Multi-Global Navigation Satellite System (GNSS) Receiver Supported Autopilot. Sensors 2019, 19, 3939. [Google Scholar] [CrossRef] [PubMed] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Kongsberg MS1000 |
|---|---|
| Frequency | 675 kHz |
| Beam width | 0.9° × 30° |
| Range | typical 0.5–100 m obtainable 150 m |
| Along track resolution | ≥19 mm (at a sound speed of 1500 m/s, transmit pulse length 25 μs) |
| Sampling resolution | ≥2.5 mm |
| Scanning angle | 360° (or user selectable) |
| Mechanical scan angle pitch | ≥0.225° |
| Scan speed | nominal 11 s/360° (at 10 m range and 1.8° scan step) |
| Transmitter pulse length | 25–2500 μs |
| Scenario | Sonar Range | Scanning Speed | Scanning Sector | No. of Image Data |
|---|---|---|---|---|
| VER_1 | 20 m | 3.6° | 43° | 7 |
| VER_2 | 25 m | 0.9° | 29° | 6 |
| VER_3 | 25 m | 1.8° | 29° | 11 |
| VER_4 | 25 m | 1.8° | 43° | 6 |
| VER_5 | 25 m | 3.6° | 29° | 10 |
| VER_6 | 25 m | 3.6° | 43° | 9 |
| VER_7 | 30 m | 1.8° | 29° | 11 |
| VER_8 | 40 m | 3.6° | 43° | 11 |
| VER_9 | 40 m | 1.8° | 43° | 7 |
| VER_10 | 30 m | 3.6° | 29° | 10 |
| HOR_1 | 20 m | 1.8° | 36° | 9 |
| HOR_2 | 20 m | 1.8° | 36° | 7 |
| HOR_3 | 10 m | 1.8° | 50° | 4 |
| Reference No | Type of Solution | Original Variance Values Type | σx2 | σy2 | σvx2 | σvy2 |
|---|---|---|---|---|---|---|
| [4] | FLS | Acceleration | 0.0004 | 0.0004 | 0.0004 | 0.0004 |
| [15] | FLS | Position/velocity | 0.01 | 0.01 | 0.01 | 0.01 |
| [18] | FLS | Range/bearing | 0.00005 | 0.00005 | 0.00005 | 0.00005 |
| [19] | FLS CA model | Acceleration | 0.01 | 0.01 | 0.01 | 0.01 |
| [19] | FLS CV model | Acceleration | 0.05 | 0.05 | 0.05 | 0.05 |
| [21] | FLS | Acceleration | 0.01 | 0.01 | 0.01 | 0.01 |
| [24] | FLS | Acceleration | 0.001 | 0.001 | 0.001 | 0.001 |
| Mean value in the FLS approach | 0.012 | 0.012 | 0.012 | 0.012 | ||
| Standard deviation in the FLS approach | 0.018 | 0.018 | 0.018 | 0.018 | ||
| [9] | TASA | Acceleration | 0.01 | 0.01 | 0.01 | 0.01 |
| [25] | UWSN | Position/velocity | 0.3333 | 0.3333 | 1 | 1 |
| Mean value in all examples | 0.047 | 0.047 | 0.121 | 0.121 | ||
| Standard deviation in all examples | 0.108 | 0.108 | 0.330 | 0.330 | ||
| Horizontal Scenario | Vertical Scenario | |||
|---|---|---|---|---|
| dx | dy | dx | dy | |
| Number of measurements | 20 | 20 | 85 | 85 |
| Mean value | 0.025 | 0.002 | −0.024 | 0.037 |
| Standard deviation | 0.64 | 0.38 | 0.84 | 0.62 |
| Horizontal Scenario | Vertical Scenario | |||
|---|---|---|---|---|
| dx | dy | dx | dy | |
| Number of measurements | 20 | 20 | 85 | 85 |
| Mean value | 8.54 × 10−2 | 4.65 × 103 | 0.19 | −0.08 |
| Standard deviation | 0.15 | 0.10 | 0.22 | 0.4 |
| Horizontal Scenario | Vertical Scenario | |||
|---|---|---|---|---|
| dCO | dV | dCO | dV | |
| Number of measurements | 105 | 105 | 234 | 234 |
| Mean value [°] | 3.55 | 0.08 | 2.19 | 0.06 |
| Standard deviation [°] | 2.69 | 0.06 | 1.86 | 0.07 |
| Source of Research Data | σx2 | σy2 | σvx2 | σvy2 |
|---|---|---|---|---|
| All literature (mean + 1 standard deviation) | 0.16 | 0.16 | 0.42 | 0.42 |
| FLS literature (mean + 1 standard deviation) | 0.03 | 0.03 | 0.03 | 0.03 |
| Analytical approach | 0.24 | 0.24 | 0.25 | 0.25 |
| Empirical verification (horizontal) | 0.43 | 0.15 | 0.15 | 0.15 |
| Empirical verification (vertical) | 0.69 | 0.54 | 0.11 | 0.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kazimierski, W.; Zaniewicz, G. Determination of Process Noise for Underwater Target Tracking with Forward Looking Sonar. Remote Sens. 2021, 13, 1014. https://doi.org/10.3390/rs13051014
Kazimierski W, Zaniewicz G. Determination of Process Noise for Underwater Target Tracking with Forward Looking Sonar. Remote Sensing. 2021; 13(5):1014. https://doi.org/10.3390/rs13051014
Chicago/Turabian StyleKazimierski, Witold, and Grzegorz Zaniewicz. 2021. "Determination of Process Noise for Underwater Target Tracking with Forward Looking Sonar" Remote Sensing 13, no. 5: 1014. https://doi.org/10.3390/rs13051014
APA StyleKazimierski, W., & Zaniewicz, G. (2021). Determination of Process Noise for Underwater Target Tracking with Forward Looking Sonar. Remote Sensing, 13(5), 1014. https://doi.org/10.3390/rs13051014