
Using Saildrones to Validate Arctic Sea-Surface Salinity from the SMAP Satellite and from Ocean Models


 ,
,  ,
, 
Abstract
:
1. Introduction
- (1)
- Validation and comparison of SMAP salinity products in the Arctic Ocean.
- (2)
- Comparisons with low- and high-resolution numerical ocean models to determine if high-resolution models are indicative of spatial variability that is not resolved by remote sensing products.
2. Material and Methods
2.1. Data
2.1.1. Satellite Salinity Data
2.1.2. In-Situ Saildrone Measurements
2.1.3. ECCO Numerical Ocean Model
2.2. Collocation Method
3. Results
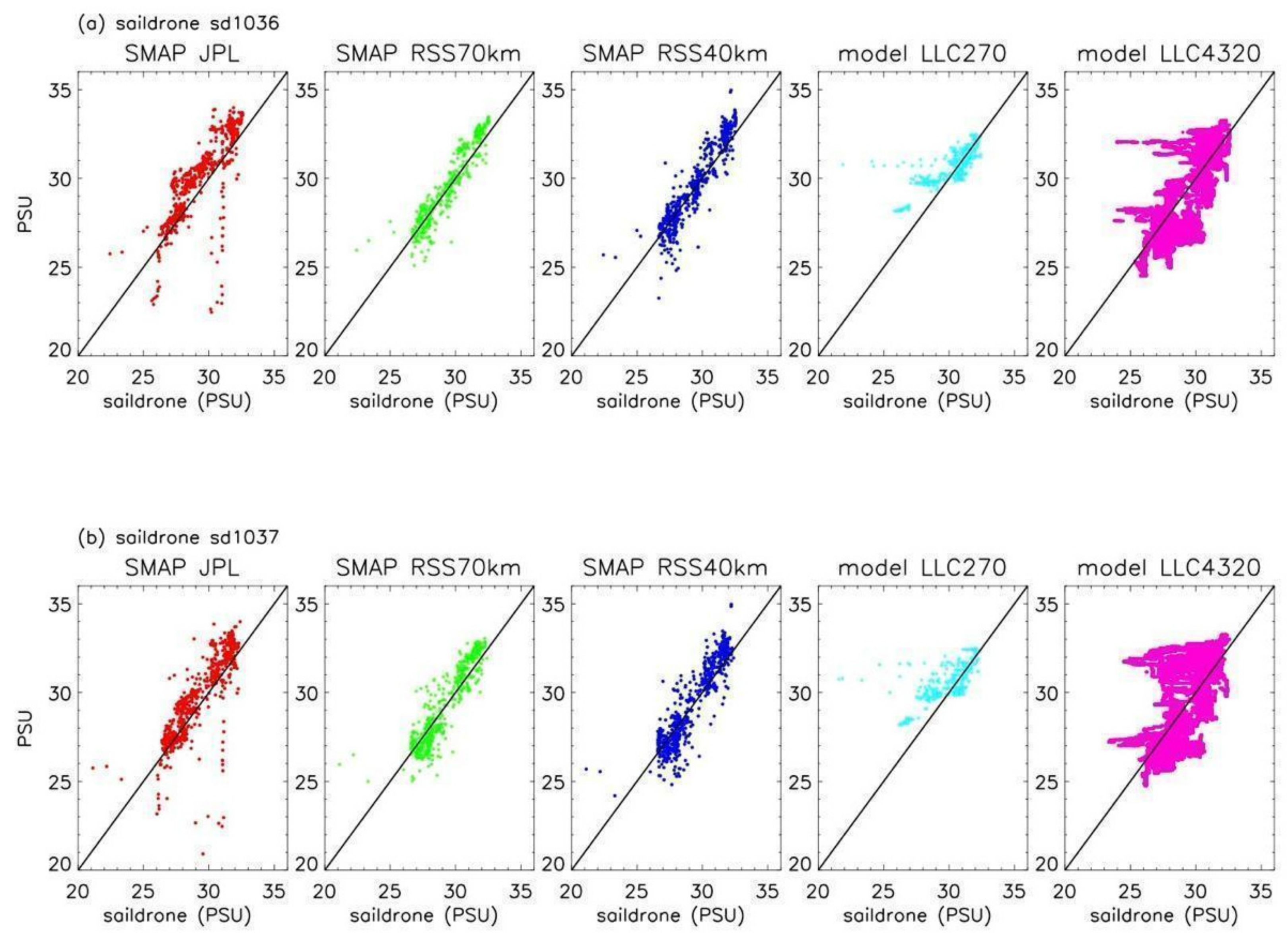
3.1. Saildrone Tracks SMAP/Model SSS
3.2. Time Series
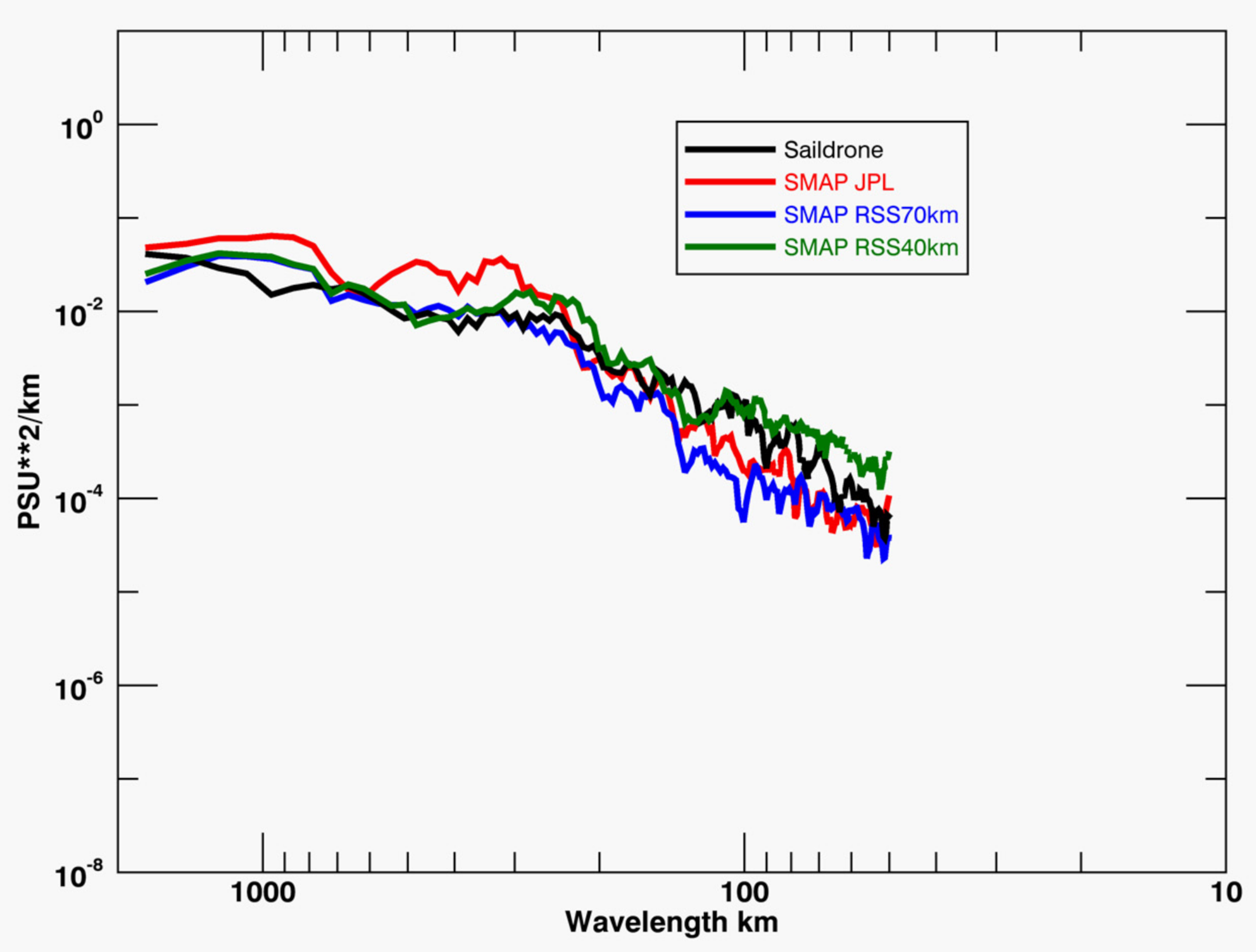
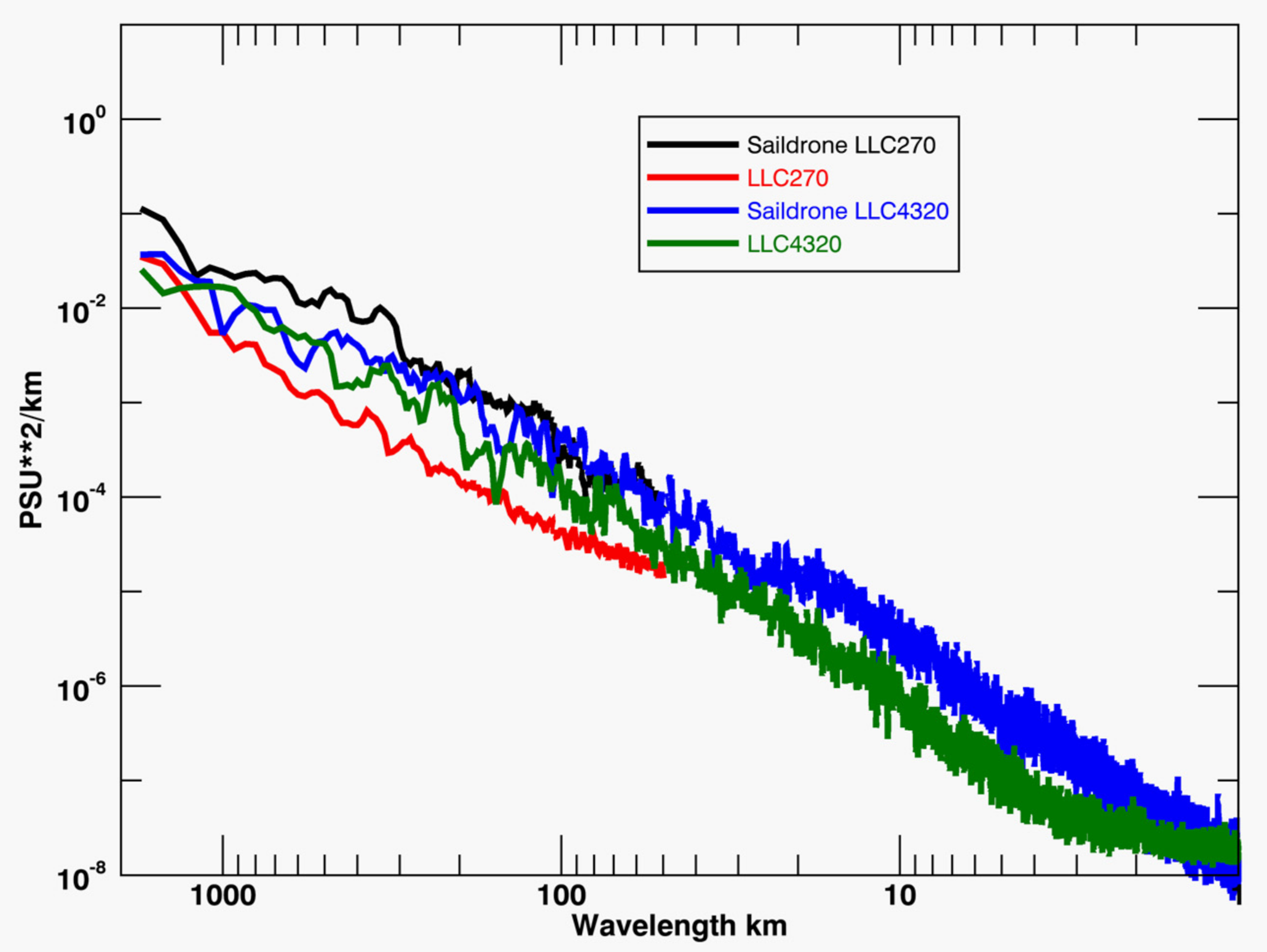
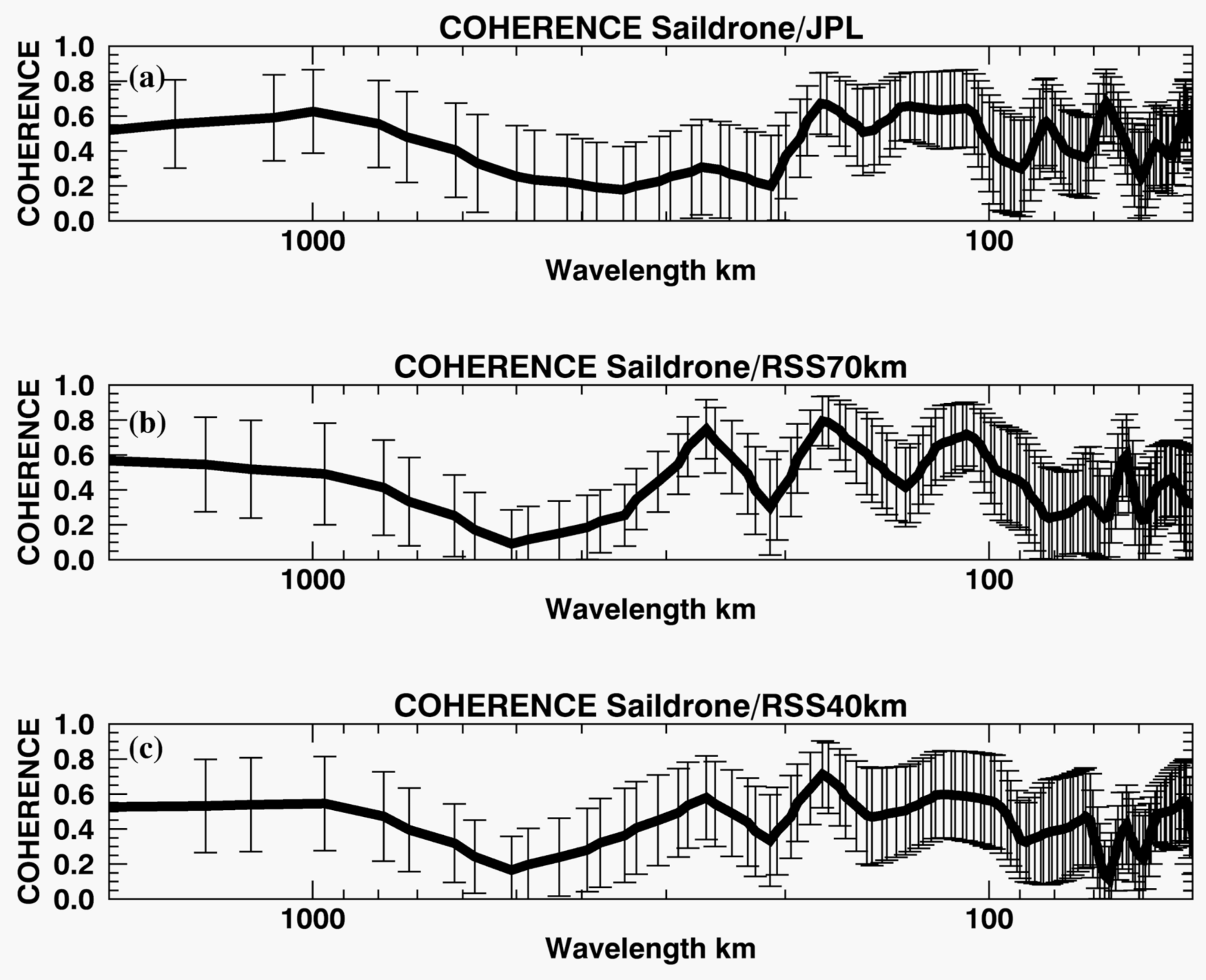
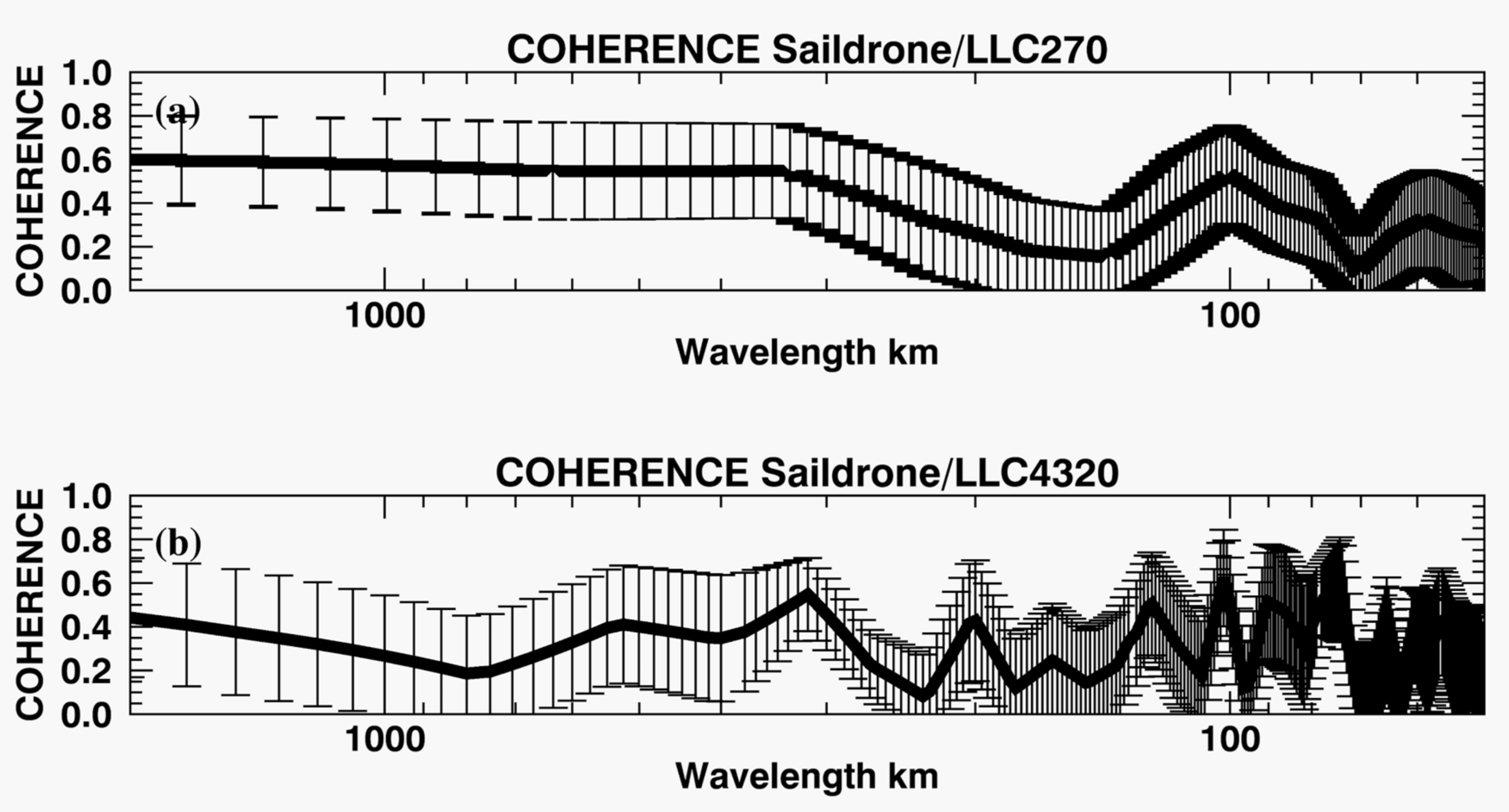
3.3. Spectra and Coherences
4. Discussion
5. Conclusions and Summary
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rogers, L.A.; Wilson, M.T.; Duffy-Anderson, J.T.; Kimmel, D.G.; Lamb, J.F. Pollock and “the Blob”: Impacts of a marine heatwave on walleye pollock early life stages. Fish. Oceanogr. 2020. Early View. [Google Scholar] [CrossRef]
- Sambrotto, R.N.; Mordy, C.; Zeeman, S.I.; Stabeno, P.J.; Macklin, S.A. Physical forcing and nutrient conditions associated with patterns of Chl and phytoplankton productivity in the southeastern Bering Sea during summer. Deep-Sea Res. Part Ii-Top. Stud. Oceanogr. 2008, 55, 1745–1760. [Google Scholar] [CrossRef]
- Walsh, J.J.; McRoy, C.P. Ecosystem Analysis in the Southeastern Bring Sea. Cont. Shelf Res. 1986, 5, 259–288. [Google Scholar] [CrossRef]
- Strom, S.L.; Fredrickson, K.A. Intense stratification leads to phytoplankton nutrient limitation and reduced microzooplankton grazing in the southeastern Bering Sea. Deep-Sea Res. Part Ii-Top. Stud. Oceanogr. 2008, 55, 1761–1774. [Google Scholar] [CrossRef]
- Fournier, S.; Lee, T.; Tang, W.Q.; Steele, M.; Olmedo, E. Evaluation and Intercomparison of SMOS, Aquarius, and SMAP Sea Surface Salinity Products in the Arctic Ocean. Remote Sens. 2019, 11, 3043. [Google Scholar] [CrossRef] [Green Version]
- Tang, W.Q.; Yueh, S.; Yang, D.Q.; Fore, A.; Hayashi, A.; Lee, T.; Fournier, S.; Holt, B. The potential and challenges of using Soil Moisture Active Passive (SMAP) sea surface salinity to monitor Arctic Ocean freshwater changes. Remote Sens. 2018, 10, 869. [Google Scholar] [CrossRef] [Green Version]
- Bjerklie, D.M.; Birkett, C.M.; Jones, J.W.; Carabajal, C.; Rover, J.A.; Fulton, J.W.; Garambois, P.A. Satellite remote sensing estimation of river discharge: Application to the Yukon River Alaska. J. Hydrol. 2018, 561, 1000–1018. [Google Scholar] [CrossRef] [Green Version]
- Vazquez-Cuervo, J.; Gomez-Valdes, J.; Bouali, M.; Miranda, L.E.; Van der Stocken, T.; Tang, W.Q.; Gentemann, C. Using Saildrones to Validate Satellite-Derived Sea Surface Salinity and Sea Surface Temperature along the California/Baja Coast. Remote Sens. 2019, 11, 1964. [Google Scholar] [CrossRef] [Green Version]
- Fore, A.G.; Yueh, S.H.; Tang, W.Q.; Stiles, B.W.; Hayashi, A.K. Combined Active/Passive Retrievals of Ocean Vector Wind and Sea Surface Salinity With SMAP. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7396–7404. [Google Scholar] [CrossRef]
- Meissner, T.; Wentz, F.J.; Le Vine, D.M. The Salinity Retrieval Algorithms for the NASA Aquarius Version 5 and SMAP Version 3 Releases. Remote Sens. 2018, 10, 1121. [Google Scholar] [CrossRef] [Green Version]
- Gentemann, C.L.; Scott, J.P.; Mazzini, P.L.F.; Pianca, C.; Akella, S.; Minnett, P.J.; Cornillon, P.; Fox-Kemper, B.; Cetinic, I.; Chin, T.M.; et al. Saildrone: Adaptively sampling the marine environment. Bull. Am. Meteorol. Soc. 2020, 2020, 744–762. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Menemenlis, D.; Fenty, I.G. ECCO LLC270 Ocean-Ice State Estimate. Available online: http://hdl.handle.net/1721.1/119821 (accessed on 1 June 2020).
- Forget, G.; Campin, J.M.; Heimbach, P.; Hill, C.N.; Ponte, R.M.; Wunsch, C. ECCO version 4: An integrated framework for non-linear inverse modeling and global ocean state estimation. Geosci. Model Dev. 2015, 8, 3071–3104. [Google Scholar] [CrossRef] [Green Version]
- Menemenlis, D.; Campin, J.; Heimbach, P.; Hill, C.; Lee, T.; Nguyen, A.; Schodlock, M.; Zhang, H. ECCO2: High resolution global ocean and sea ice data synthesis. Mercator Ocean Q. Newsl. 2008, 31, 13–21. [Google Scholar]
- Fenty, I.; Menemenlis, D.; Zhang, H. Global coupled sea ice-ocean state estimation. Clim. Dyn. 2017, 49, 931–956. [Google Scholar] [CrossRef]
- Fekete, B.M.; Vorosmarty, C.J.; Grabs, W. High-resolution fields of global runoff combining observed river discharge and simulated water balances. Glob. Biogeochem. Cycles 2002, 16. [Google Scholar] [CrossRef]
- Redi, M.H. Oceanic Isopycnal Mixing by Coordinate Rotation. J. Phys. Oceanogr. 1982, 12, 1154–1158. [Google Scholar] [CrossRef] [Green Version]
- Gent, P.R.; McWilliams, J.C. Isopycnal mixing in ocean circulation models. J. Phys. Oceanogr. 1990, 20, 150–155. [Google Scholar] [CrossRef] [Green Version]
- Forget, G.; Ponte, R.M. The partition of regional sea level variability. Prog. Oceanogr. 2015, 137, 173–195. [Google Scholar] [CrossRef] [Green Version]
- Andersen, O.; Knudsen, P.; Stenseng, L. The DTU13 MSS (Mean Sea Surface) and MDT (Mean Dynamic Topography) from 20 years of satellite altimetry. In IGFS 2014 International Association of Geodesy Symposia; Jin, S., Barzaghi, R., Eds.; Springer: Cham, Switzerland, 2015; Volume 144, pp. 111–121. [Google Scholar]
- Watkins, M.M.; Wiese, D.N.; Yuan, D.N.; Boening, C.; Landerer, F.W. Improved methods for observing Earth’s time variable mass distribution with GRACE using spherical cap mascons. J. Geophys. Res. Solid Earth 2015, 120, 2648–2671. [Google Scholar] [CrossRef]
- Reynolds, R.W.; Rayner, N.A.; Smith, T.M.; Stokes, D.C.; Wang, W.Q. An improved in situ and satellite SST analysis for climate. J. Clim. 2002, 15, 1609–1625. [Google Scholar] [CrossRef]
- Meier, W.; Fetterer, F.; Savoie, M.; Mallory, S.; Duerr, R.; Stroeve, J. NOAA/NSIDC Climate Data Record of Passive Microwave Sea Ice Concentration, Version 3. Available online: https://nsidc.org/data/G02202/versions/3 (accessed on 1 June 2020).
- Roemmich, D.; Gilson, J. The 2004–2008 mean and annual cycle of temperature, salinity, and steric height in the global ocean from the Argo Program. Prog. Oceanogr. 2009, 82, 81–100. [Google Scholar] [CrossRef]
- Riser, S.C.; Swift, D.; Drucker, R. Profiling Floats in SOCCOM: Technical Capabilities for Studying the Southern Ocean. J. Geophys. Res. Ocean 2018, 123, 4055–4073. [Google Scholar] [CrossRef]
- Locarnini, R.; Mishonov, A.; Boyer, T.; Garcia, H.; Baranova, O. World Ocean Atlas 2009, Volume 1: Temperature. In NOAA Atlas NESDIS; U.S. Government Printing Office: Washington, DC, USA, 2010; Volume 68. [Google Scholar]
- Antonov, J.; Seidov, D.; Boyer, T.; Locarnini, R.; Mishonov, A.; Garcia, H. World Ocean Atlas 2009, Volume 2: Salinity. In NOAA Atlas NESDIS; U.S. Government Printing Office: Washington, DC, USA, 2010; Volume 69. [Google Scholar]
- Roquet, F.; Wunsch, C.; Forget, G.; Heimbach, P.; Guinet, C.; Reverdin, G.; Charrassin, J.B.; Bailleul, F.; Costa, D.P.; Huckstadt, L.A.; et al. Estimates of the Southern Ocean general circulation improved by animal-borne instruments. Geophys. Res. Lett. 2013, 40, 6176–6180. [Google Scholar] [CrossRef] [Green Version]
- Treasure, A.M.; Roquet, F.; Ansorge, I.J.; Bester, M.N.; Boehme, L.; Bornemann, H.; Charrassin, J.B.; Chevallier, D.; Costa, D.P.; Fedak, M.A.; et al. Marine Mammals Exploring the Oceans Pole to Pole A Review of the MEOP Consortium. Oceanography 2017, 30, 132–138. [Google Scholar] [CrossRef]
- Krishfield, R.; Toole, J.; Proshutinsky, A.; Timmermans, M.L. Automated Ice-Tethered Profilers for Seawater Observations under Pack Ice in All Seasons. J. Atmos. Ocean. Technol. 2008, 25, 2091–2105. [Google Scholar] [CrossRef]
- Wunsch, C.; Heimbach, P. Dynamically and kinematicaly consistent global ocean circulation and ice state estimates. In Ocean Circulation and Climate: A 21st Century Perspective; Siedler, G., Church, J., Gould, J., Griffies, S., Eds.; Elsevier: Amsterdam, The Netherlands, 2013; pp. 553–579. [Google Scholar]
- Wunsch, C.; Heimbach, P.; Ponte, R.M.; Fukumori, I.; Members, E.-G.C. The global general circulation of the ocean estimated by the ecco-consortium. Oceanography 2009, 22, 88–103. [Google Scholar] [CrossRef]
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.A.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Hoyer, S.; Hamman, J.; Roos, M.; Cherian, D.; Fitzgerald, C.; Fujii, K.; Maussion, F.; Crusaderky, K.; Kleeman, A.; Clark, S.; et al. Pydata/xarray: v0.16.0. Available online: https://zenodo.org/record/3940662#.YDW54It62Uk (accessed on 1 June 2020).
- Tang, W.; Simon, H.; Yueh, S.H.; Alexander, G.; Akiko, K. An Empirical Sea Ice Correction Algorithm for SMAP SSS Retrieval in the Arctic Ocean. In Proceedings of the IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 5639–5642. [Google Scholar]
- Vazquez-Cuervo, J.; Gomez-Valdes, J.; Bouali, M. Comparison of satellite-driven sea surface temperature and sea surface salinity gradients using the Saildrone California/Baja and North Atlantic Gulf Stream deployments. Remote Sens. 2020, 12, 1839. [Google Scholar] [CrossRef]
- Castro, S.L.; Monzon, L.A.; Wick, G.A.; Lewis, R.D.; Beylkin, G. Subpixel variability and quality assessment of satellite sea surface temperature data using a novel High Resolution Multistage Spectral Interpolation (HRMSI) technique. Remote Sens. Environ. 2018, 217, 292–308. [Google Scholar] [CrossRef]
- Castro, S.L.; Wick, G.A.; Steele, M. Validation of satellite sea surface temperature analyses in the Beaufort Sea using UpTemp buoys. Remote Sens. Environ. 2016, 187, 458–475. [Google Scholar] [CrossRef]
- Carroll, D.; Menmenlis, D.; Adkins, J.F.; Bowman, K.W.; Brix, H.; Dutkiewicz, S.; Fenty, I.; Gierach, M.M.; Hill, C.; Jahn, O.; et al. The ECCO-Darwin Data-Assimilative Global Ocean. Biogeochemistry Model: Estimates of Seasonal to Multidecadal Surface Ocean. pCO2 and Air-Sea CO2 Flux. J. Adv. Model. Earth Syst. 2020, 12, e2019MS001888. [Google Scholar] [CrossRef]
- Brabets, T.P.; Wang, B.; Meade, R.H. Environmental and Hydrologic Overview of the Yukon River Basin, Alaska and Canada; United States Geological Survey: Reston, VA, USA, 2000. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Correlation | Bias (PSU) | RMSD (PSU) |
|---|---|---|---|
| JPLSSS 1036 | 0.82 | 0.66 | 1.34 |
| JPLSSS 1037 | 0.84 | 0.42 | 1.24 |
| RSS70km 1036 | 0.95 | 0.04 | 0.73 |
| RSS70km 1037 | 0.92 | −0.03 | 0.89 |
| RSS40km 1036 | 0.93 | 0.03 | 0.88 |
| RSS40km 1037 | 0.91 | −0.005 | 0.98 |
| LLC270 1036 | 0.83 | 0.49 | 1.11 |
| LLC270 1037 | 0.79 | 0.67 | 1.22 |
| LLC4320 1036 | 0.82 | 0.39 | 1.37 |
| LLC4320 1037 | 0.97 | 0.03 | 1.45 |
| Parameter | Slope |
|---|---|
| JPL/Sail | −2.26 |
| JPL | −2.96 |
| RSS70km/Sail | −2.26 |
| RSS70km | −2.67 |
| RSS40km/Sail | −2.26 |
| RSS40km | −1.93 |
| LLC270/Sail | −2.14 |
| LLC270 | −1.81 |
| LLC4320/Sail | −2.05 |
| LLC4320 | −2.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vazquez-Cuervo, J.; Gentemann, C.; Tang, W.; Carroll, D.; Zhang, H.; Menemenlis, D.; Gomez-Valdes, J.; Bouali, M.; Steele, M. Using Saildrones to Validate Arctic Sea-Surface Salinity from the SMAP Satellite and from Ocean Models. Remote Sens. 2021, 13, 831. https://doi.org/10.3390/rs13050831
Vazquez-Cuervo J, Gentemann C, Tang W, Carroll D, Zhang H, Menemenlis D, Gomez-Valdes J, Bouali M, Steele M. Using Saildrones to Validate Arctic Sea-Surface Salinity from the SMAP Satellite and from Ocean Models. Remote Sensing. 2021; 13(5):831. https://doi.org/10.3390/rs13050831
Chicago/Turabian StyleVazquez-Cuervo, Jorge, Chelle Gentemann, Wenqing Tang, Dustin Carroll, Hong Zhang, Dimitris Menemenlis, Jose Gomez-Valdes, Marouan Bouali, and Michael Steele. 2021. "Using Saildrones to Validate Arctic Sea-Surface Salinity from the SMAP Satellite and from Ocean Models" Remote Sensing 13, no. 5: 831. https://doi.org/10.3390/rs13050831
APA StyleVazquez-Cuervo, J., Gentemann, C., Tang, W., Carroll, D., Zhang, H., Menemenlis, D., Gomez-Valdes, J., Bouali, M., & Steele, M. (2021). Using Saildrones to Validate Arctic Sea-Surface Salinity from the SMAP Satellite and from Ocean Models. Remote Sensing, 13(5), 831. https://doi.org/10.3390/rs13050831