
A Hybrid Polarimetric Target Decomposition Algorithm with Adaptive Volume Scattering Model

 , ,
, ,
Abstract
:
1. Introduction
2. Methodology
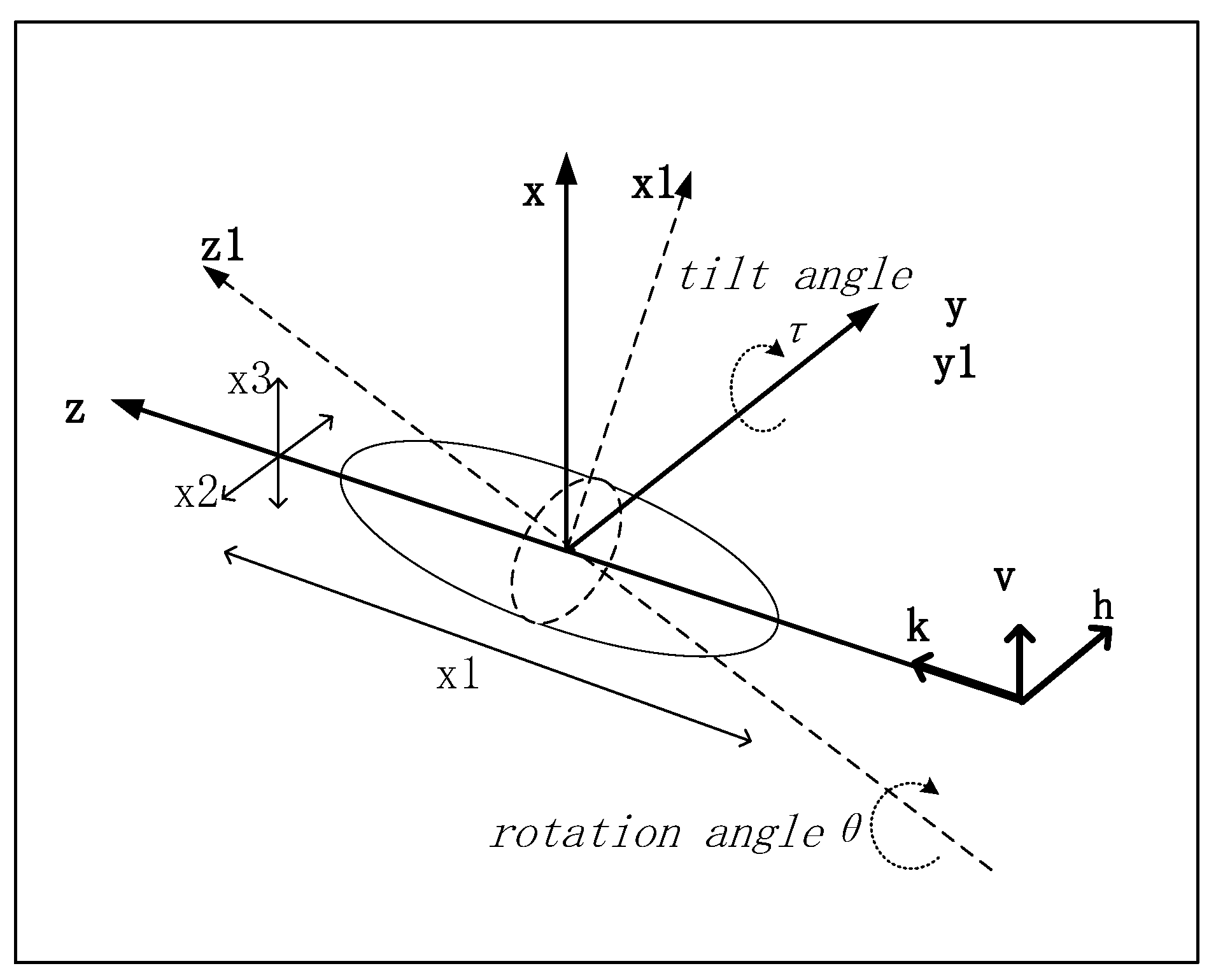
2.1. Orientation Angle Compensation
2.2. Polarimetric Target Decomposition Algorithm for Regions Dominated by Double-Bounce Scattering
2.2.1. Volume Scattering Model for Regions Dominated by Double-Bounce Scattering
2.2.2. Polarimetric Target Decomposition Algorithm with GVSM
2.3. Polarimetric Target Decomposition Algorithm for Regions Dominated by Surface Scattering
2.3.1. Volume Scattering Model for Regions Dominated by Surface Scattering
2.3.2. Polarization Decomposition Algorithm with RPCM
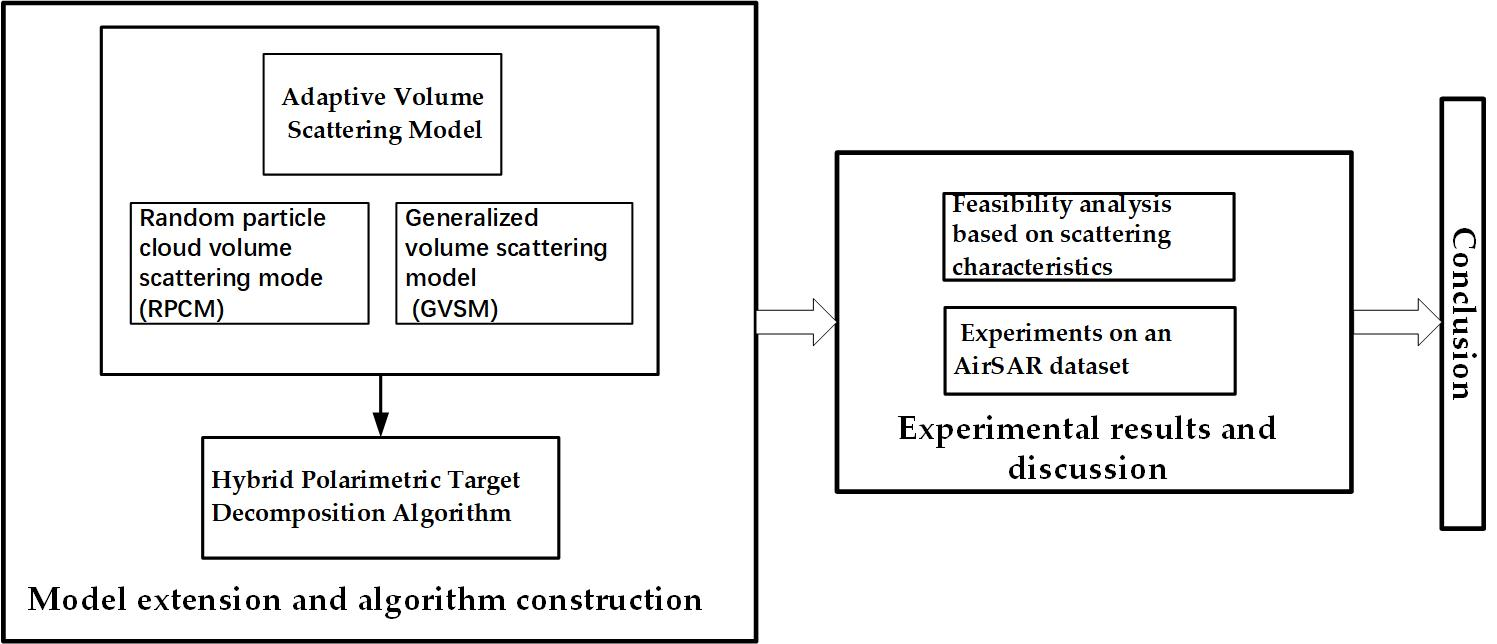
2.4. Hybrid Polarimetric Target Decomposition Algorithm with Adaptive Volume Scattering Model
- Extract coherency matrix T from the measured fully PolSAR data using PolSARpro software;
- Boxcar filtering with an window for the elements of the coherency matrix to reduce speckle noise;
- Calculate the polarization angle using , the real part of , and according to Equation (6), and obtain the scattering matrix T0 in the radar line of sight direction following Equation (1);
- Calculate the covariance matrix by converting the coherency matrix T0 following Equation (7);
- Determine the dominant scattering mechanism for each pixel using the relationship between and . The pixel will be surface scattering dominant when ; otherwise, double-bounce scattering will be dominant;
- Calculate the polarimetric target decomposition components using the corresponding polarimetric target decomposition algorithms according to the different scattering mechanisms to obtain the value of each scattering component of each pixel.
3. Experimental Results and Discussion
- Accuracy in the decomposition component;
- Percentage of negative power pixels.
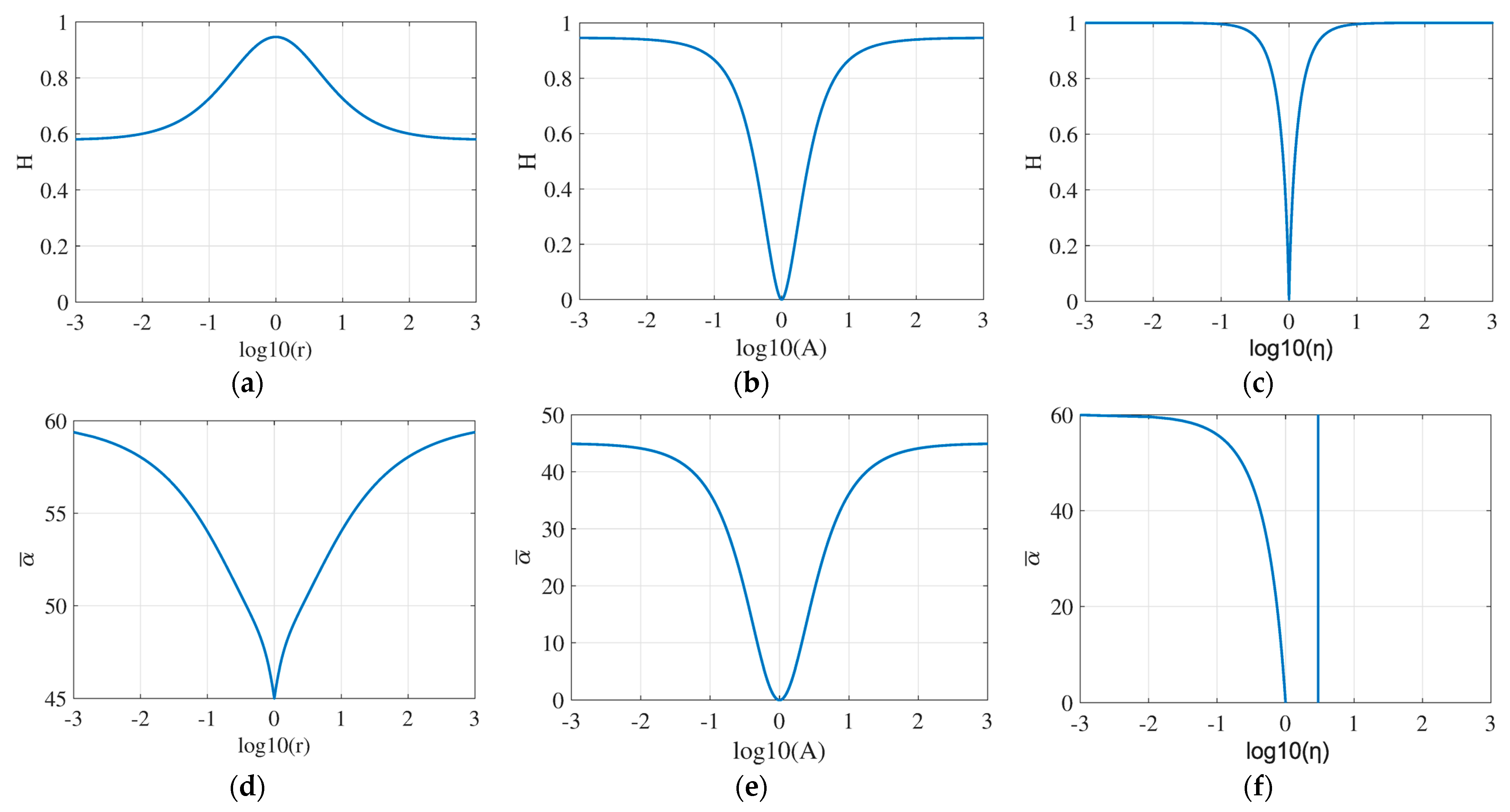
3.1. Theoretical Feasibility of the Adaptive Volume Scattering Model
- The polarimetric scattering characteristic line of GVSM (in red line) is in Zones 5, 4 and 2 of the H/ plane. Among them, Zone 5 is medium entropy vegetation scattering, Zone 4 is medium entropy multiple scattering, and Zone 2 is high entropy vegetation scattering. This means that the GVSM can represent double-bounce scattering mechanisms and volume scattering mechanisms;
- The polarimetric scattering characteristic line of RPCM (in blue line) overlaps with the boundary line of the two-dimensional H/ plane (in black line); they are in Zones 9, 6, and 2 of the H/ plane. Among these zones, Zone 9 has a low entropy surface scatter, and Zone 6 has a medium entropy surface scatter, which means that the RPCM scan represents both surface scattering and volume scattering;
- The lower left part of the FRE2 volume scattering model polarimetric scattering characteristic line (in gray) overlaps with the RPCM polarimetric scattering characteristic line (in blue) and the boundary line of the two-dimensional H/ plane (in black line). The upper part of the FRE2 volume scattering model polarimetric scattering characteristic line (in gray) drops out of the two-dimensional H/ plane, and the right part of the characteristic line is irregular;
- The FDD volume scattering model (the red pentagram in Zone 2) is at the intersection point of the GVSM line and RPCM line, indicating that the FDD volume scattering model is a special case of these two models;
- The YRO volume scattering model (the blue diamond in Zone 4) is at the edge of the polarimetric scattering characteristic line of GVSM (in red), showing that the YRO volume scattering model is a special case of GVSM;
- An’s volume scattering model (black star in Zone 1) is a completely random model located on the right tip point of the H/ plane, which belongs to high entropy multiple scattering and overlaps with points of the FRE2 volume scattering model.
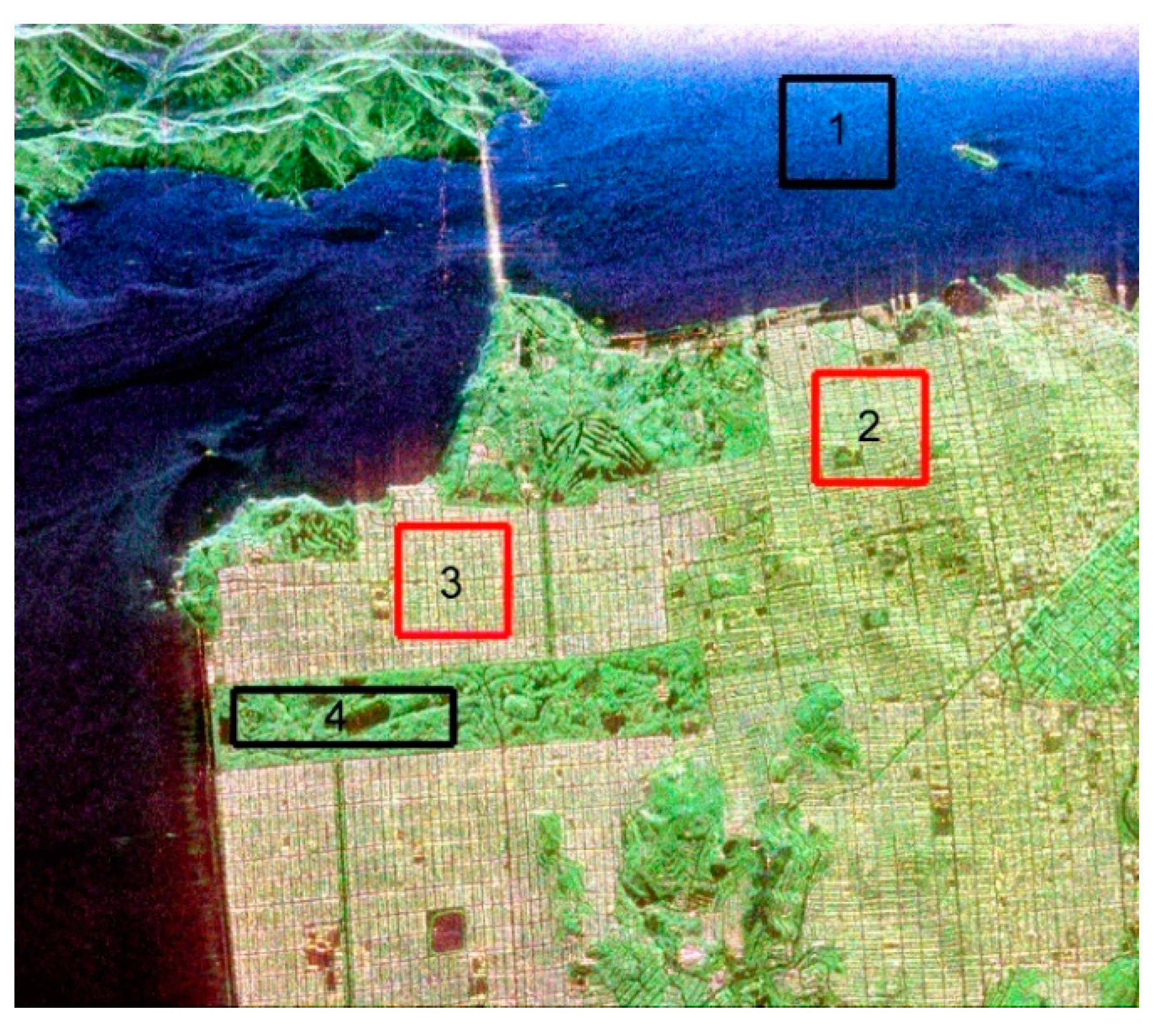
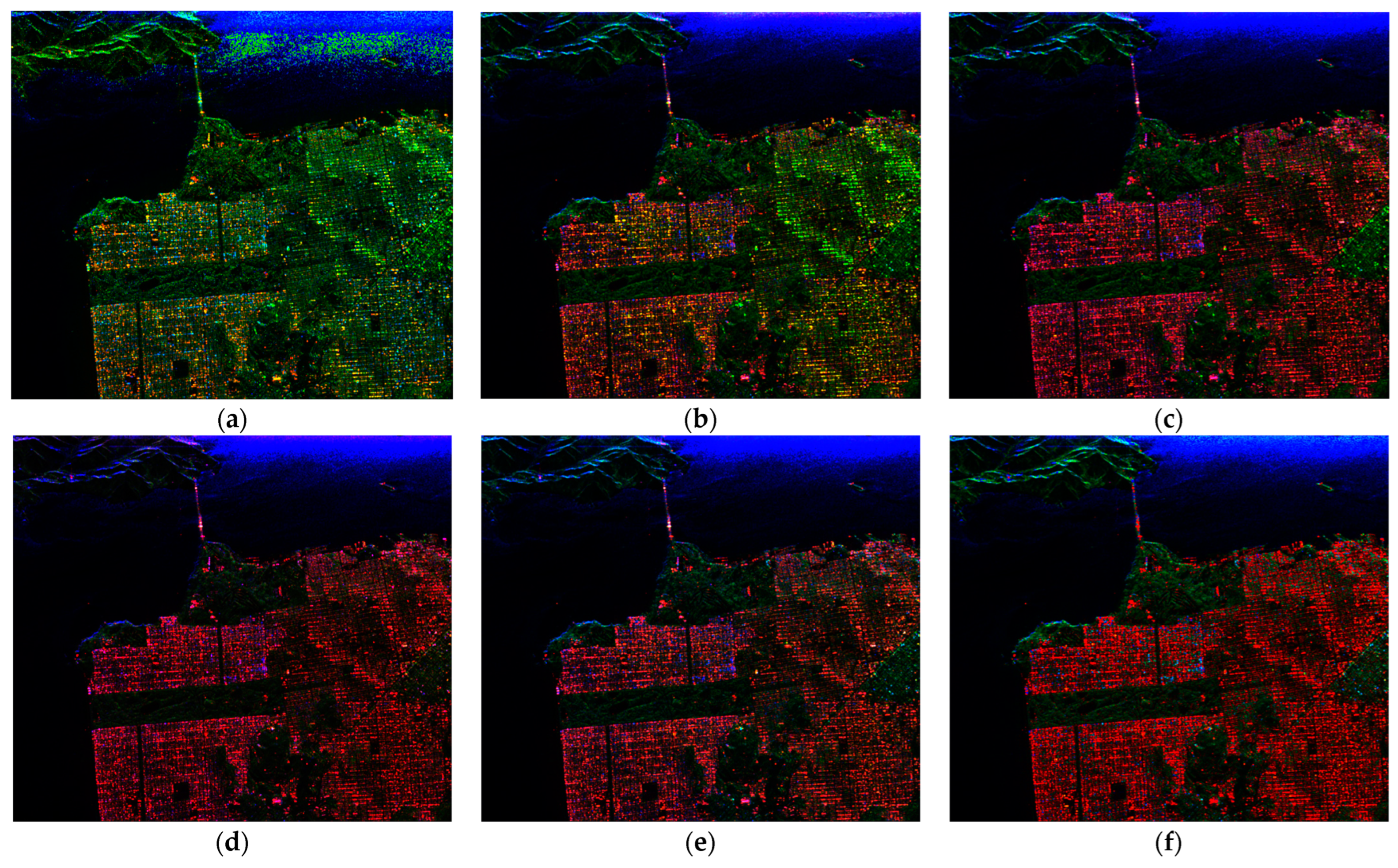
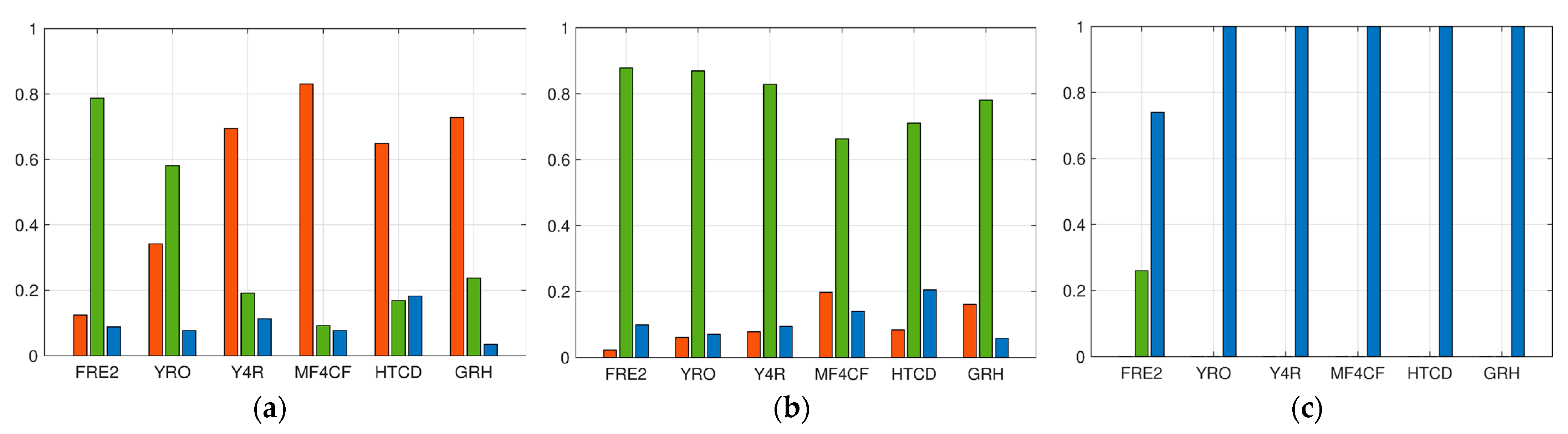
3.2. Experiments on the AirSAR Dataset
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, S.; Wang, X.; Xiao, S. Urban damage level mapping based on co-polarization coherence pattern using multitemporal polarimetric SAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2657–2667. [Google Scholar] [CrossRef]
- Ji, Y.; Sri Sumantyo, J.T.; Chua, M.Y.; Waqar, M.M. Earthquake/tsunami damage assessment for urban areas using post-event PolSAR data. Remote Sens. 2018, 10, 1088. [Google Scholar] [CrossRef] [Green Version]
- Musthafa, M.; Khati, U.; Singh, G. Sensitivity of PolSAR decomposition to forest disturbance and regrowth dynamics in a managed forest. Adv. Space Res. 2020, 66, 1863–1875. [Google Scholar] [CrossRef]
- Varghese, A.O.; Suryavanshi, A.; Joshi, A.K. Analysis of different polarimetric target decomposition methods in forest density classification using C band SAR data. Int. J. Remote Sens. 2016, 37, 694–709. [Google Scholar] [CrossRef]
- Acar, H.; Ozerdem, M.S.; Acar, E. Soil moisture inversion via semiempirical and machine learning methods with full-polarization Radarsat-2 and polarimetric target decomposition data: A comparative study. IEEE Access 2020, 8, 197896–197907. [Google Scholar] [CrossRef]
- Zhang, L.; Meng, Q.; Zeng, J.; Wei, X.; Shi, H. Evaluation of Gaofen-3 C-band SAR for soil moisture retrieval using different polarimetric decomposition models. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 5707–5719. [Google Scholar] [CrossRef]
- Tan, W.; Sun, B.; Xiao, C.; Huang, P.; Xu, W.; Yang, W. A novel unsupervised classification method for sandy land using fully polarimetric SAR data. Remote Sens. 2021, 13, 355. [Google Scholar] [CrossRef]
- Maurya, H.; Panigrahi, R.K. Non-negative scattering power decomposition for PolSAR data interpretation. IET Radar Sonar Navig. 2018, 12, 593–602. [Google Scholar] [CrossRef]
- Arii, M.; van Zyl, J.J.; Kim, Y. A general characterization for polarimetric scattering from vegetation canopies. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3349–3357. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, W.; Wang, C.; Liu, X. A modified four-component decomposition method with refined volume scattering models. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1946–1958. [Google Scholar] [CrossRef]
- Zhang, S.; YU, X.; WANG, L. Modified version of three-component model-based decomposition for polarimetric SAR data. J. Syst. Eng. Electron. 2019, 30, 270–277. [Google Scholar] [CrossRef]
- Sato, A.; Yamaguchi, Y.; Singh, G.; Sang-Eun, P. Four-component scattering power decomposition with extended volume scattering model. IEEE Geosci. Remote Sens. Lett. 2012, 9, 166–170. [Google Scholar] [CrossRef]
- Kumar, A.; Maurya, H.; Misra, A.R.; Panigrahi, R.K. An Improved Decomposition as a Trade-Off between Utilizing Unitary Matrix Rotations and New Scattering Models. IEEE Access 2021, 9, 77482–77492. [Google Scholar] [CrossRef]
- Chen, S.; Li, Y.; Wang, X.; Xiao, S.; Sato, M. Modeling and Interpretation of Scattering Mechanisms in Polarimetric Synthetic Aperture Radar: Advances and perspectives. IEEE Signal. Process. Mag. 2014, 31, 79–89. [Google Scholar] [CrossRef]
- Van Zyl, J.J.; Arii, M.; Kim, Y. Model-based decomposition of polarimetric SAR covariance matrices constrained for nonnegative eigenvalues. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3452–3459. [Google Scholar] [CrossRef]
- Van Zyl, J.J.; Arii, M.; Kim, Y. Requirements for Model-Based Polarimetric Decompositions. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 8–11 July 2008; IEEE: New York, NY, USA, 2008; Volume 5, pp. V-417–V-420. [Google Scholar]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef] [Green Version]
- Yamaguchi, Y.; Yajima, Y.; Yamada, H. A four-component decomposition of PoLSAR images based on the coherency matrix. IEEE Geosci. Remote Sens. Lett. 2006, 3, 292–296. [Google Scholar] [CrossRef]
- Wang, Z.; Zeng, Q.; Jiao, J. A New Volume Scattering Model for Three-Component Decomposition of Polarimetric SAR Data. Int. Geosci. Remote Sens. Symp. 2018, 2018, 4575–4578. [Google Scholar] [CrossRef]
- Yin, Q.; Xu, J.; Xiang, D.; Zhou, Y.; Zhang, F. Polarimetric Decomposition with an Urban Area Descriptor for Compact Polarimetric SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10033–10044. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-component scattering model for polarimetric SAR image decomposition. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1699–1706. [Google Scholar] [CrossRef]
- Singh, G.; Malik, R.; Mohanty, S.; Rathore, V.S.; Yamada, K.; Umemura, M.; Yamaguchi, Y. Seven-component scattering power decomposition of PoLSAR coherency matrix. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8371–8382. [Google Scholar] [CrossRef]
- Singh, G.; Yamaguchi, Y. Model-based six-component scattering matrix power decomposition. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5687–5704. [Google Scholar] [CrossRef]
- Han, W.; Fu, H.; Zhu, J.; Wang, C.; Xie, Q. Polarimetric SAR Decomposition by Incorporating a Rotated Dihedral Scattering Model. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4005505. [Google Scholar] [CrossRef]
- Wang, Y.; Ainsworth, T.L.; Lee, J. Sen Disk-Shaped Random Scatterers with Application to Model-Based PolSAR Decomposition. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1961–1965. [Google Scholar] [CrossRef]
- Yin, J.; Yang, J. Target Decomposition Based on Symmetric Scattering Model for Hybrid Polarization SAR Imagery. IEEE Geosci. Remote Sens. Lett. 2021, 18, 494–498. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Sato, A.; Boerner, W.; Sato, R.; Yamada, H. Four-component scattering power decomposition with rotation of coherency matrix. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2251–2258. [Google Scholar] [CrossRef]
- Maurya, H.; Panigrahi, R.K. PolSAR coherency matrix optimization through selective unitary rotations for model-based decomposition scheme. IEEE Geosci. Remote Sens. Lett. 2019, 16, 658–662. [Google Scholar] [CrossRef]
- Chen, S.; Wang, X.; Xiao, S.; Sato, M. General polarimetric model-based decomposition for coherency matrix. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1843–1855. [Google Scholar] [CrossRef]
- Ainsworth, T.L.; Wang, Y.; Lee, J. Sen Model-Based Polarimetric SAR Decomposition: An L1 Regularization Approach. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Van Zyl, J.J. Application of Cloude’s Target Decomposition Theorem to Polarimetric Imaging Radar Data. Radar Polarim. 1993, 1748, 184. [Google Scholar] [CrossRef] [Green Version]
- Arii, M.; van Zyl, J.J.; Kim, Y. Adaptive model-based decomposition of polarimetric sar covariance matrices. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1104–1113. [Google Scholar] [CrossRef]
- Cui, Y.; Yamaguchi, Y.; Yang, J.; Park, S.; Kobayashi, H.; Singh, G. Three-component power decomposition for polarimetric SAR data based on adaptive volume scatter modeling. Remote Sens. 2012, 4, 1559–1572. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharya, A.; Singh, G.; Manickam, S.; Yamaguchi, Y. An adaptive general four-component scattering power decomposition with unitary transformation of coherency matrix (AG4U). IEEE Geosci. Remote Sens. Lett. 2015, 12, 2110–2114. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, L.; Zhu, S. A Four-Component Decomposition Model for Polarimetric SAR Images Based on Adaptive Volume Scattering Model. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 23–27 July 2018; pp. 4563–4566. [Google Scholar]
- Xie, Q.; Zhu, J.; Lopez-Sanchez, J.M.; Wang, C.; Fu, H. A modified general polarimetric model-based decomposition method with the simplified neumann volume scattering model. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1229–1233. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Zeng, Q.; Jiao, J. An adaptive decomposition approach with dipole aggregation model for polarimetric sar data. Remote Sens. 2021, 13, 2583. [Google Scholar] [CrossRef]
- Antropov, O.; Rauste, Y.; Hame, T. Volume scattering modeling in PolSAR decompositions: Study of ALOS PALSAR data over boreal forest. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3838–3848. [Google Scholar] [CrossRef]
- Freeman, A. Fitting a two-component scattering model to polarimetric SAR data from forests. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2583–2592. [Google Scholar] [CrossRef]
- Dey, S.; Bhattacharya, A.; Frery, A.C.; Lopez-Martinez, C.; Rao, Y.S. A model-free four component scattering power decomposition for polarimetric SAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3887–3902. [Google Scholar] [CrossRef]
- Nghiem, S.; Yueh, S.; Kwok, R.; Nguyen, D. Polarimetric remote sensing of geophysical medium structures. Radio Sci. 1993, 28, 1111–1130. [Google Scholar] [CrossRef]
- Neumann, M.; Ferro-Famil, L.; Reigber, A. Estimation of forest structure, ground, and canopy layer characteristics from multibaseline polarimetric interferometric SAR data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1086–1104. [Google Scholar] [CrossRef] [Green Version]
- Dong, Z.; Feng, X.; Zhou, H.; Liu, C.; Sato, M. Effects of induced field rotation from rough surface on H-alpha decomposition of full-polarimetric GPR. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9192–9208. [Google Scholar] [CrossRef]
- Lee, J.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press/Taylor & Francis: Boca Raton, FL, USA, 2009. [Google Scholar]
- An, W.; Cui, Y.; Yang, J. Three-component model-based decomposition for polarimetric sar data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2732–2739. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nan |
| Component | FRE2 | YRO | Y4R | MF4CF | HTCD | GRH |
|---|---|---|---|---|---|---|
| Pd | 8.47 | 18.63 | 29.87 | 36.87 | 28.92 | 35.82 |
| Pv | 52.25 | 35.42 | 22.64 | 14.58 | 18.36 | 22.27 |
| Ps | 39.28 | 45.95 | 47.49 | 48.55 | 52.72 | 41.91 |
| Region | Component | FRE2 | YRO | Y4R | MF4CF | HTCD | GRH |
|---|---|---|---|---|---|---|---|
| Pd | 12.48 | 34.19 | 69.52 | 83.05 | 64.93 | 72.78 | |
| Mask_1 | Pv | 78.72 | 58.13 | 19.19 | 9.23 | 16.89 | 23.74 |
| Ps | 8.79 | 7.68 | 11.29 | 7.72 | 18.18 | 3.48 | |
| Pd | 2.25 | 6.07 | 7.77 | 19.75 | 8.36 | 16.11 | |
| Mask_2 | Pv | 87.85 | 86.93 | 82.80 | 66.30 | 71.12 | 78.03 |
| Ps | 9.89 | 7.00 | 9.43 | 13.95 | 20.52 | 5.86 | |
| Pd | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
| Mask_3 | Pv | 26.03 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Ps | 73.97 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 |
| Component | FRE2 | YRO | Y4R | MF4CF | HTCD | GRH |
|---|---|---|---|---|---|---|
| Pd | 5.78 | 18.09 | 17.75 | 0.00 | 15.64 | 0.00 |
| Pv | 15.59 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| Ps | 2.09 | 15.96 | 5.42 | 0.00 | 0.95 | 0.00 |
| Total | 23.46 | 34.05 | 23.17 | 0.00 | 16.59 | 0.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Liu, Y.; Huang, P.; Liu, X.; Tan, W.; Fu, W.; Li, C. A Hybrid Polarimetric Target Decomposition Algorithm with Adaptive Volume Scattering Model. Remote Sens. 2022, 14, 2441. https://doi.org/10.3390/rs14102441
Li X, Liu Y, Huang P, Liu X, Tan W, Fu W, Li C. A Hybrid Polarimetric Target Decomposition Algorithm with Adaptive Volume Scattering Model. Remote Sensing. 2022; 14(10):2441. https://doi.org/10.3390/rs14102441
Chicago/Turabian StyleLi, Xiujuan, Yongxin Liu, Pingping Huang, Xiaolong Liu, Weixian Tan, Wenxue Fu, and Chunming Li. 2022. "A Hybrid Polarimetric Target Decomposition Algorithm with Adaptive Volume Scattering Model" Remote Sensing 14, no. 10: 2441. https://doi.org/10.3390/rs14102441
APA StyleLi, X., Liu, Y., Huang, P., Liu, X., Tan, W., Fu, W., & Li, C. (2022). A Hybrid Polarimetric Target Decomposition Algorithm with Adaptive Volume Scattering Model. Remote Sensing, 14(10), 2441. https://doi.org/10.3390/rs14102441