
Integrating Deep Learning and Hydrodynamic Modeling to Improve the Great Lakes Forecast

 ,
, 

 and
and
Abstract
:1. Introduction
2. Neural Network
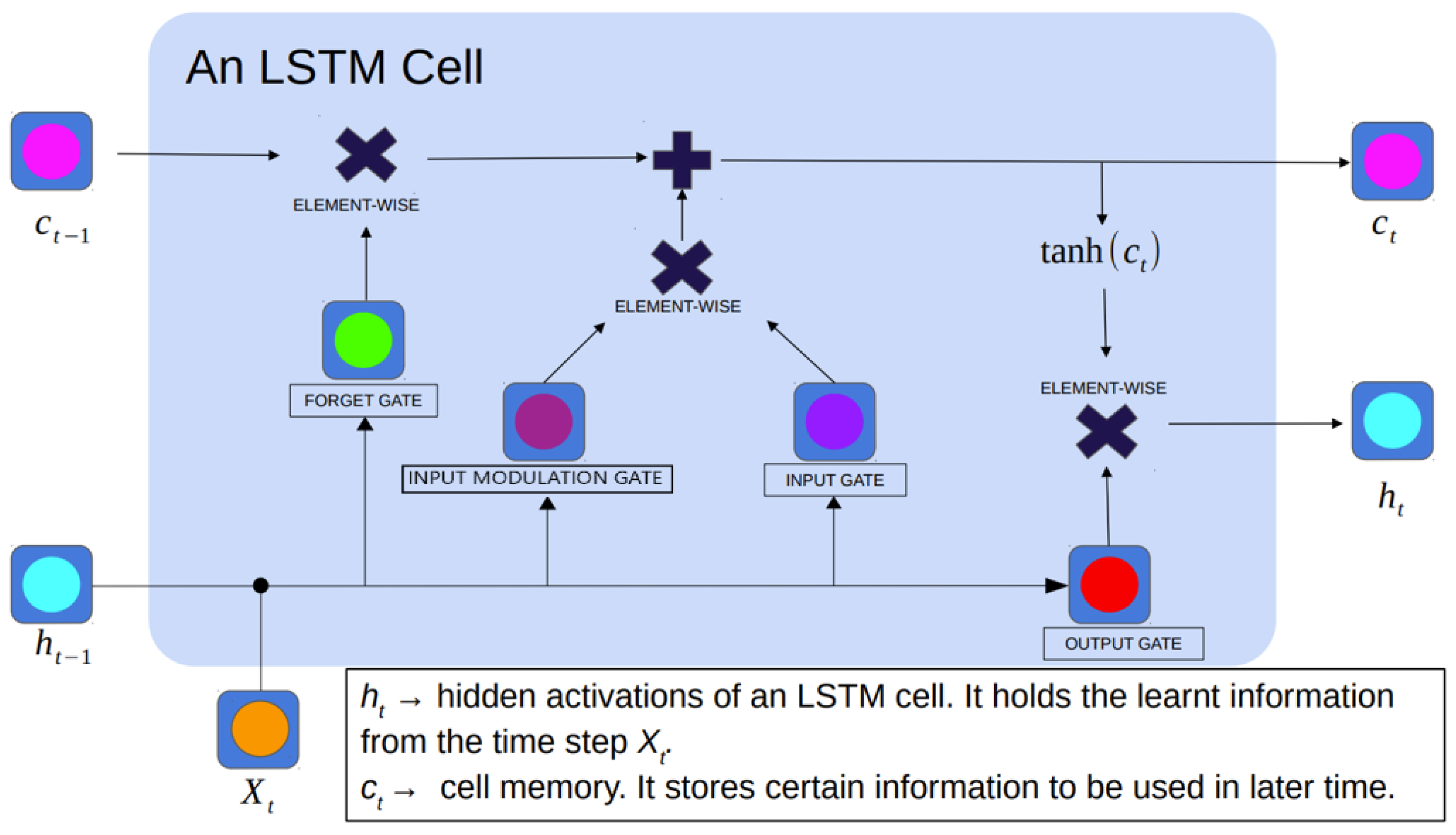
2.1. LSTM
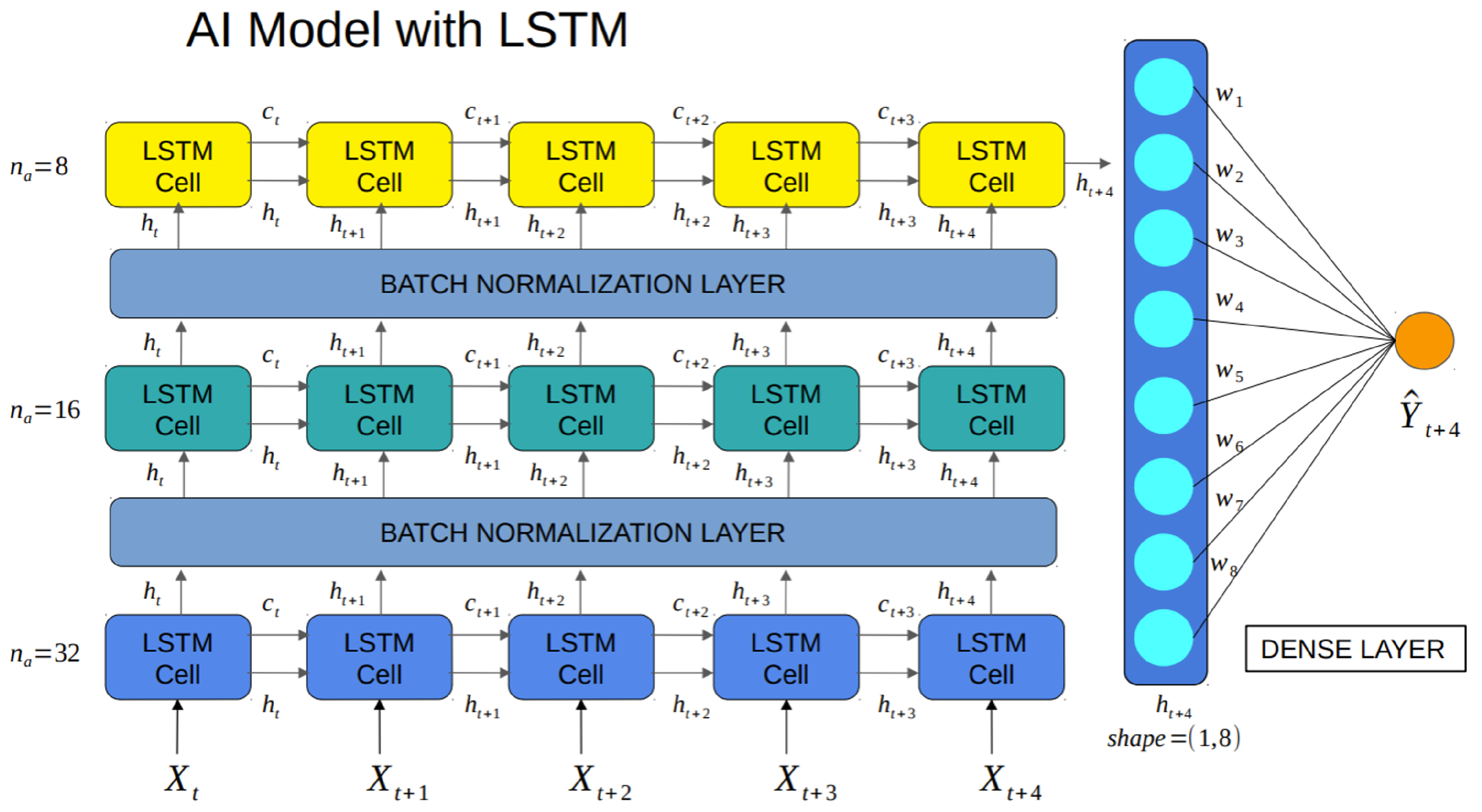
2.2. Architecture
2.3. Data Processing
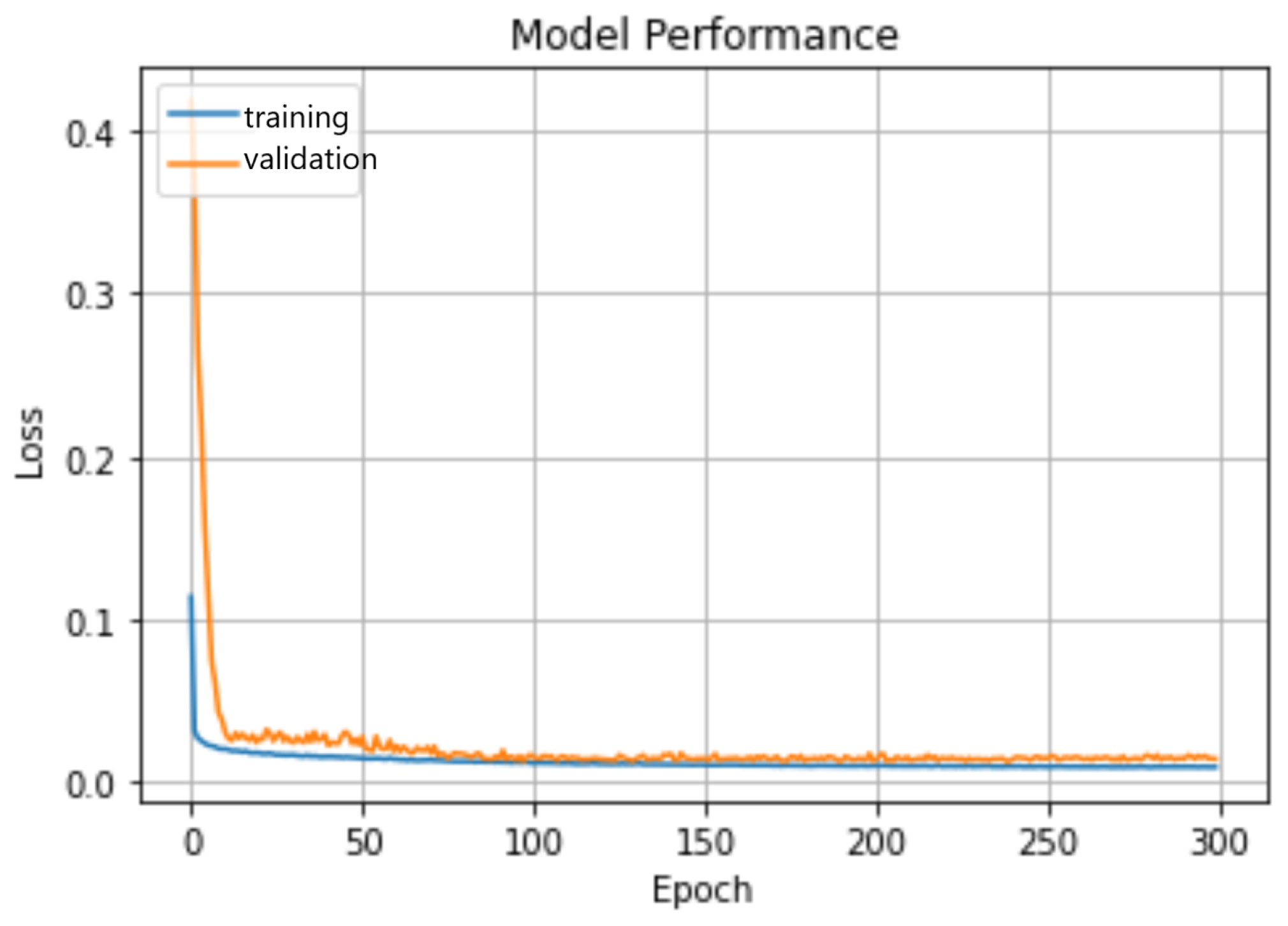
2.4. LSTM Training and Validation
2.5. LSTM Prediction
3. Hydrodynamic Modeling
4. Results
4.1. LST Spatiotemporal Pattern from the LSTM Prediction
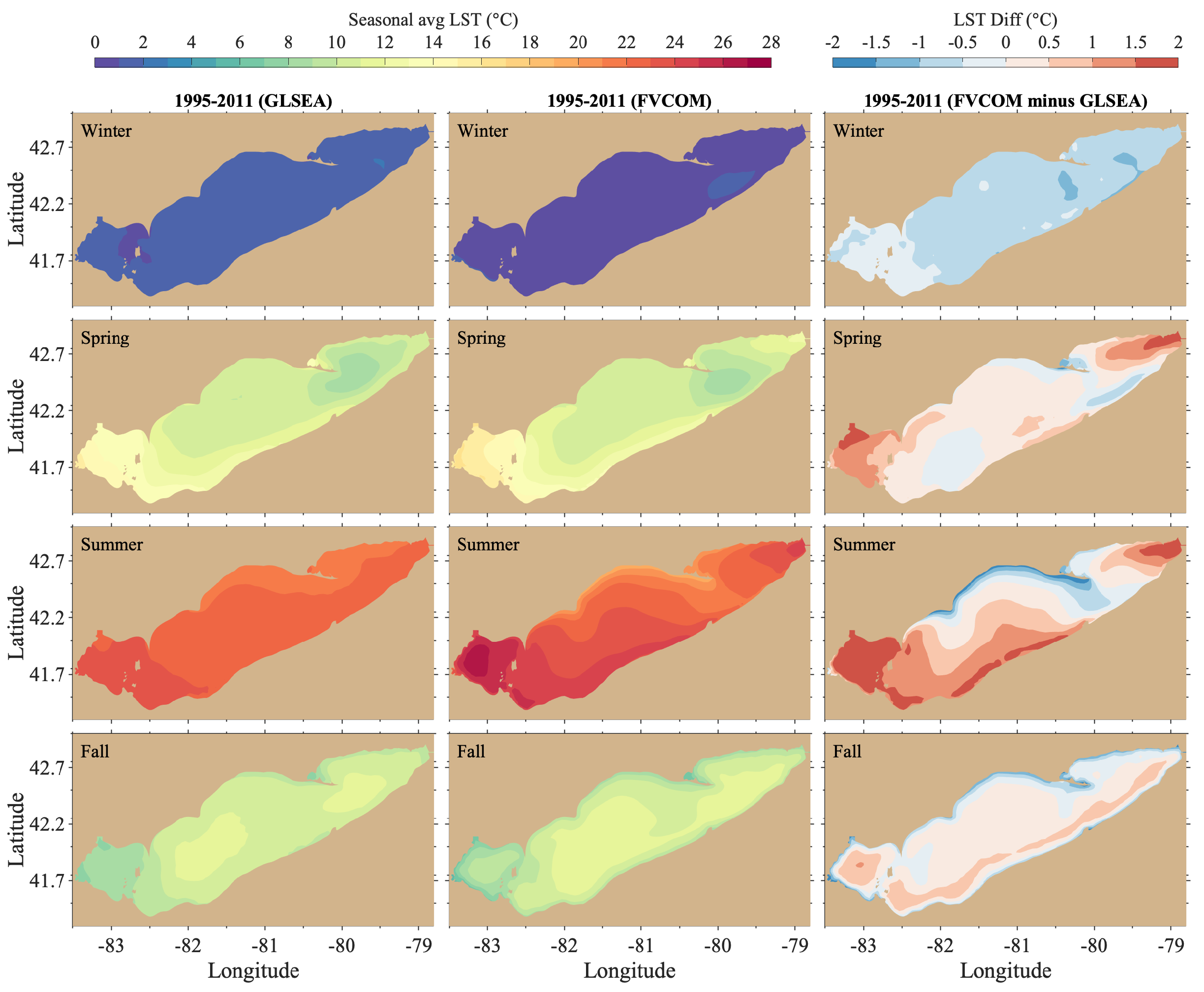
4.2. LST Spatiotemporal Pattern from the FVCOM Prediction
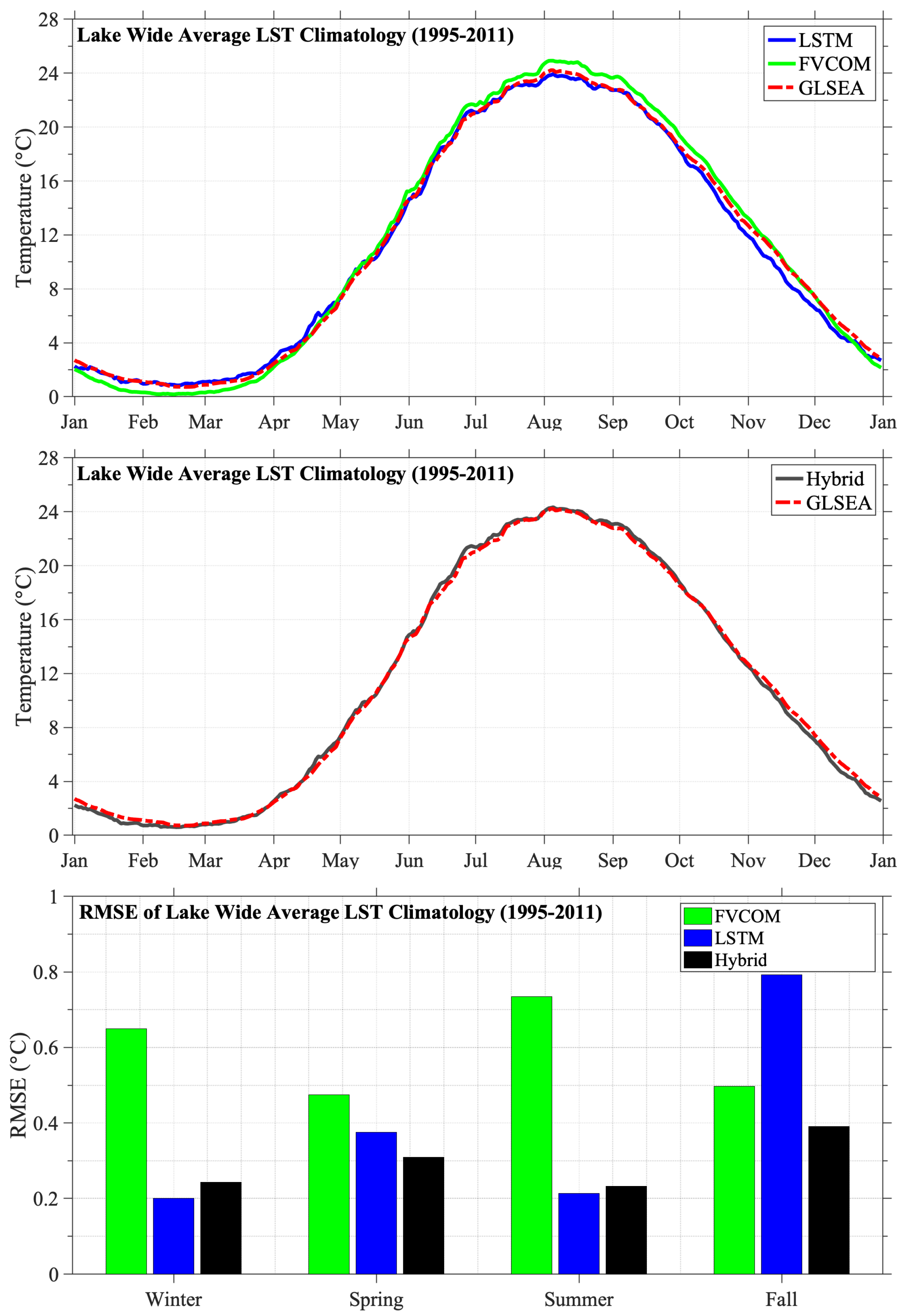
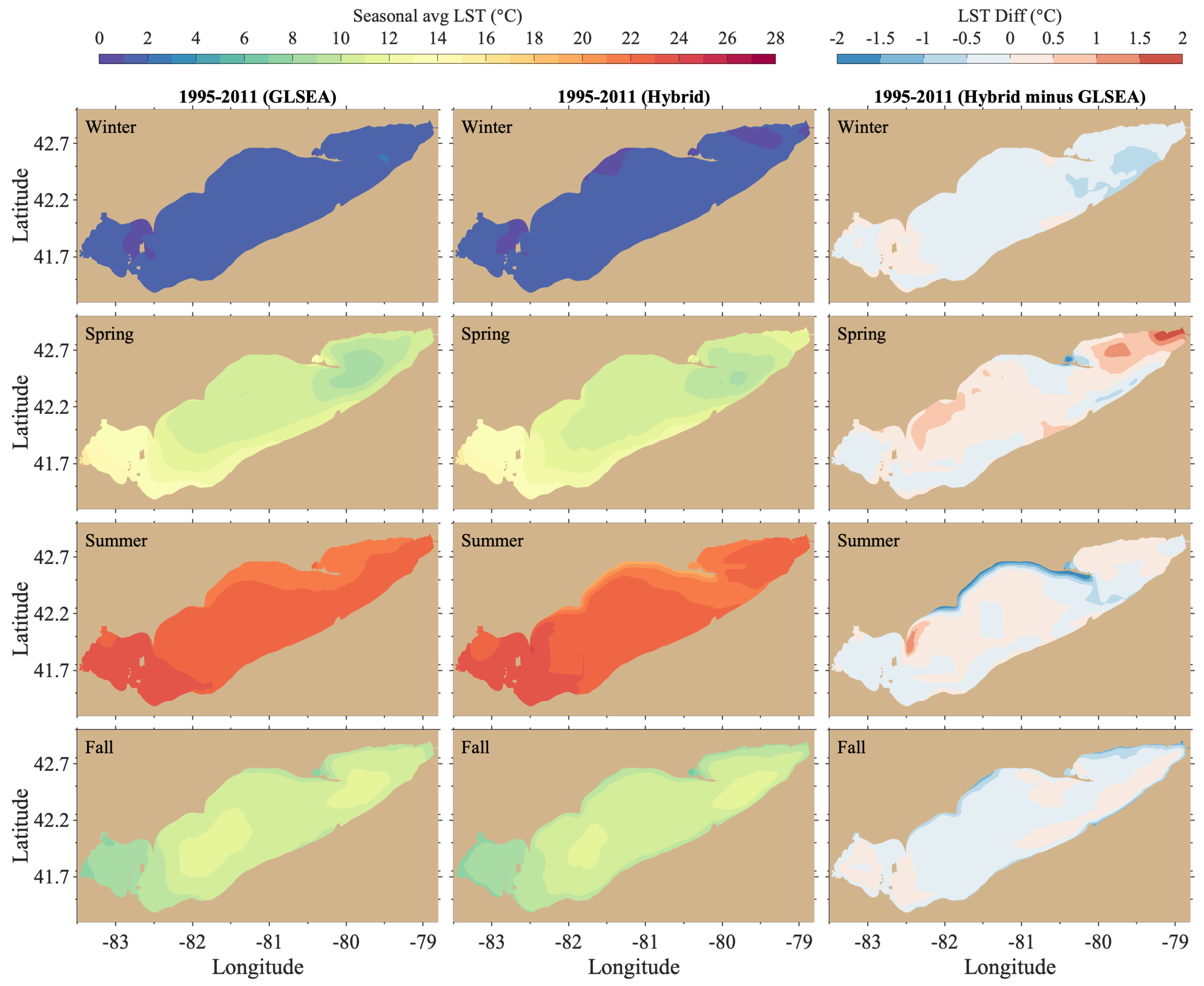
4.3. Integration of Hydrodynamic Model and LSTM
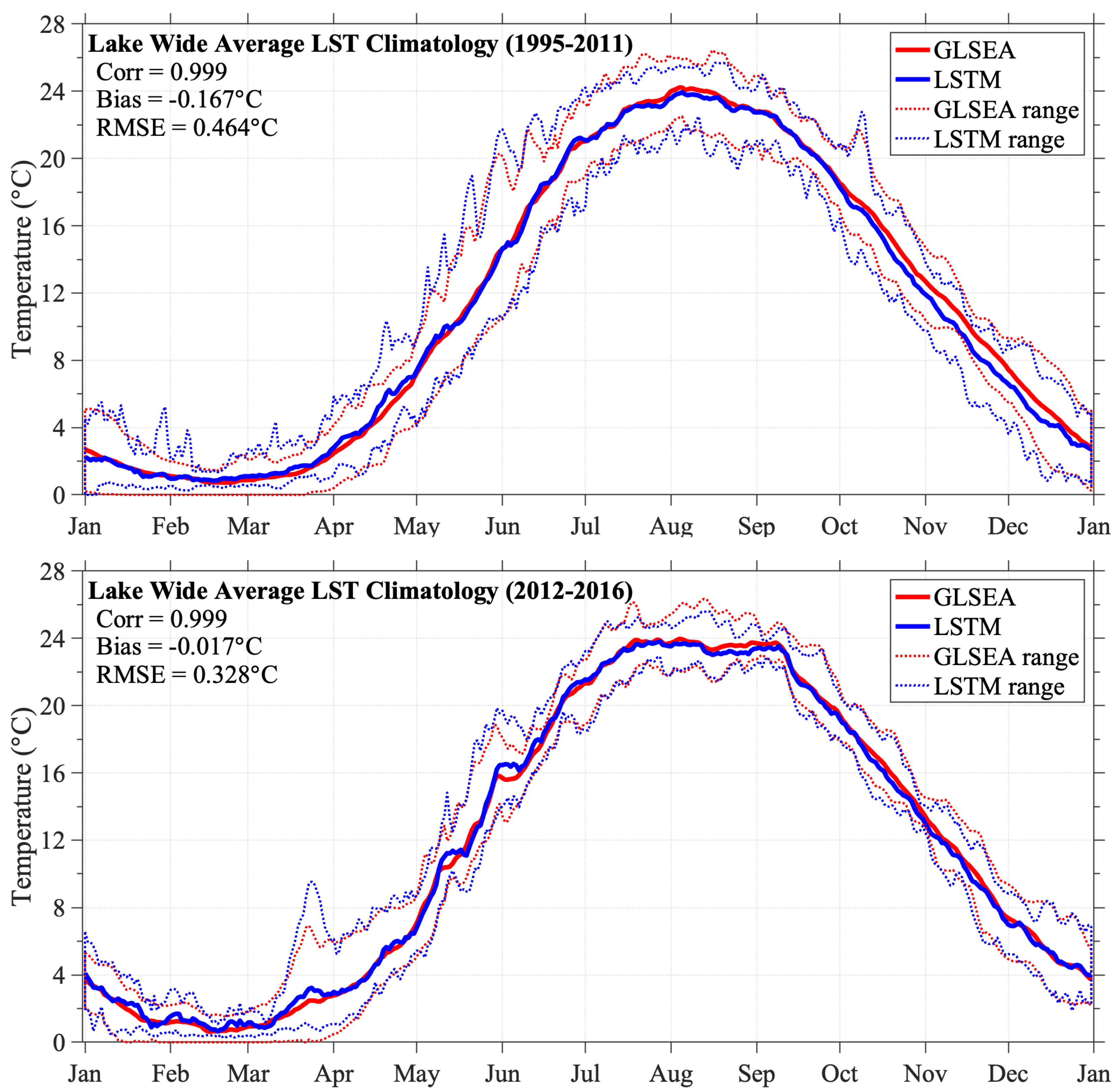
4.4. Prediction beyond the Training Period
4.5. Evaluation of the LSTM Performance for Other Lakes
4.6. Effect of Water Depth
5. Discussion
5.1. Understanding of Model Performance
5.2. Future Model Improvement
6. Summary and Conclusions
- Previous ML studies of the Great Lakes hydrodynamic forecast focused on wave predictions, which are controlled primarily by wind features. These studies either developed the emulator of the physics-based wave model in a single lake [36] or developed a wind-wave nonlinear relationship at a few specific sites [37]. Using seven meteorological features, this study is the first one to apply deep learning to predict the spatiotemporal patterns of the LSTs across the five Great Lakes.
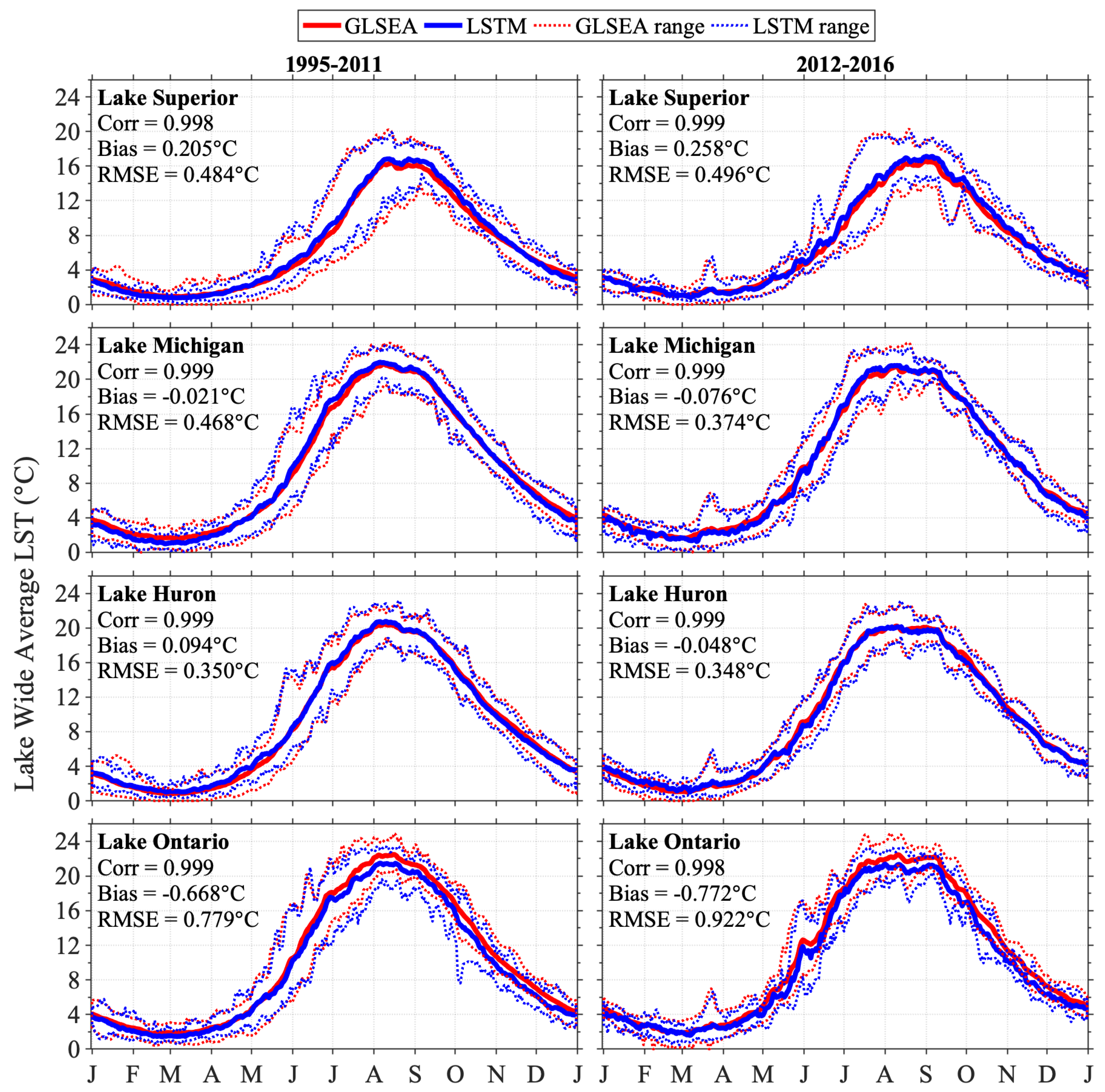
- Our approach is highly efficient in developing systematic predictions across the Great Lakes. In the previous study [36], the training of the surrogate model required a large amount of training data generated from the physics-based wave model. This approach has two drawbacks (1) developing a physics-based model for all the five lakes becomes a prerequisite, and (2) the accuracy of the physics-based model constrains the deep learning performance. This study demonstrated the feasibility of training LSTMs with limited observations to make reliable predictions for the entire lake. The predictions from the LSTM models have consistent and robust performance across the lakes and are able to capture the temporal and spatial variabilities of LSTs for the entirety of the five Great Lakes. This is important as designing the observation network for data collection is primarily limited by the costs of deployment and maintenance.
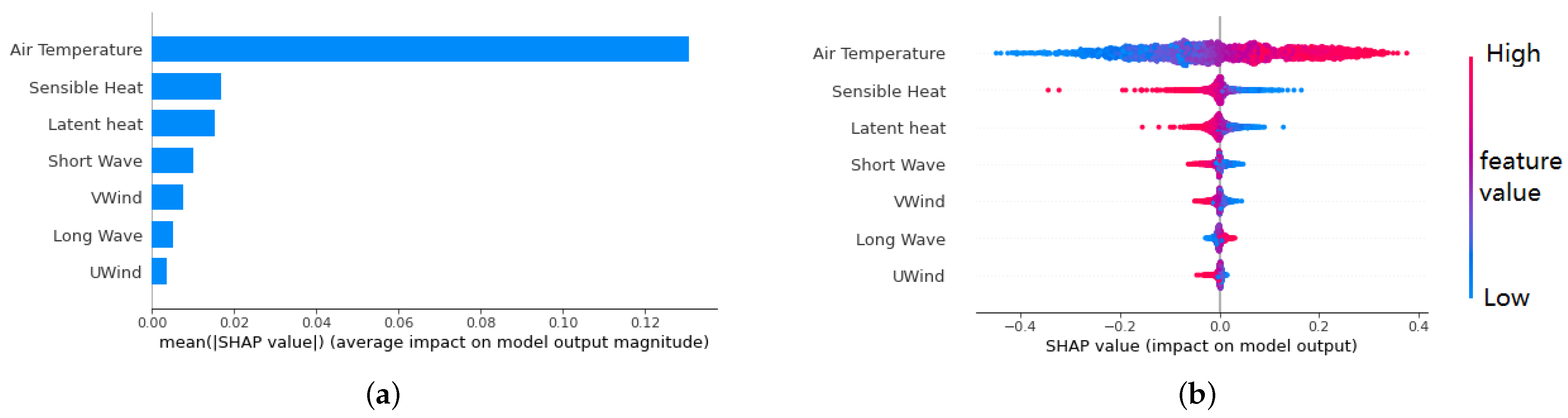
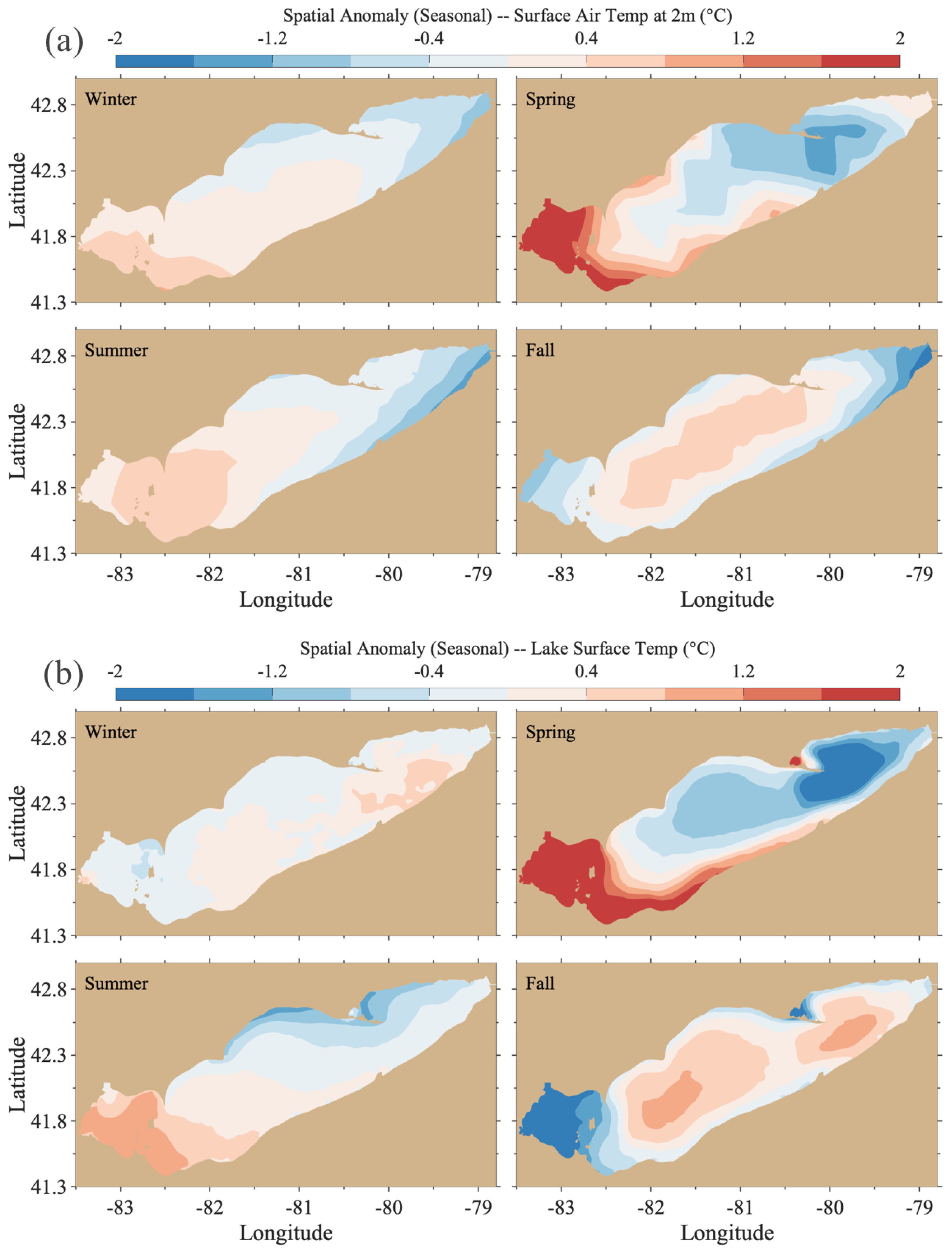
- We further examined the features through an explainable AI technique (i.e., SHAP) to better understand their contributions to the model prediction. The SHAP analysis revealed air temperature is the most influential feature for predicting the LST in the trained LSTMs. The prediction bias is closely associated with substantial spatial heterogeneity of air temperature, particularly during spring and fall.
- Lastly, we demonstrated the integration of data-driven deep learning and mechanistic hydrodynamic modeling in the Great Lakes LST prediction. Our results showed that using the variational method to integrate the FVCOM and LSTM results can further enhance prediction accuracy. While the hydrodynamic model provides us with the mechanistic understanding and description of the Great Lakes system, a well-trained deep learning model could serve as an auxiliary tool to the hydrodynamic model simulation. Therefore, this work offers a new viable avenue for developing the next-generation Great Lakes forecast system.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| LST | Lake Surface Temperature |
| ML | Machine Learning |
| ANN | Artificial Neural Network |
| LSTM | Long short-term memory |
| MLP | Multi-layer Perceptron |
| FVCOM | Finite Volume Community Ocean Model |
References
- U.S.EPA. State of the Great Lakes 2011; Technical Report, EPA 950-R-13-002; EPA: Washington, DC, USA, 2014. [Google Scholar]
- Shi, Q.; Xue, P. Impact of lake surface temperature variations on lake effect snow over the Great Lakes region. J. Geophys. Res. Atmos. 2019, 124, 12553–12567. [Google Scholar] [CrossRef]
- Xue, P.; Pal, J.S.; Ye, X.; Lenters, J.D.; Huang, C.; Chu, P.Y. Improving the simulation of large lakes in regional climate modeling: Two-way lake–atmosphere coupling with a 3D hydrodynamic model of the Great Lakes. J. Clim. 2017, 30, 1605–1627. [Google Scholar] [CrossRef]
- Notaro, M.; Zhong, Y.; Xue, P.; Peters-Lidard, C.; Cruz, C.; Kemp, E.; Kristovich, D.; Kulie, M.; Wang, J.; Huang, C.; et al. Cold Season Performance of the NU-WRF Regional Climate Model in the Great Lakes Region. J. Hydrometeorol. 2021, 22, 2423–2454. [Google Scholar] [CrossRef]
- Wang, J.; Xue, P.; Pringle, W.; Yang, Z.; Qian, Y. Impacts of Lake Surface Temperature on the Summer Climate Over the Great Lakes Region. J. Geophys.-Res.-Atmos. 2022; in press. [Google Scholar] [CrossRef]
- Austin, J.A.; Colman, S.M. Lake Superior summer water temperatures are increasing more rapidly than regional air temperatures: A positive ice-albedo feedback. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.; Kuczynski, A.; Auer, M.T.; O’Donnell, D.M.; Xue, P. Management transition to the Great Lakes nearshore: Insights from hydrodynamic modeling. J. Mar. Sci. Eng. 2019, 7, 129. [Google Scholar] [CrossRef] [Green Version]
- Ye, X.; Chu, P.Y.; Anderson, E.J.; Huang, C.; Lang, G.A.; Xue, P. Improved thermal structure simulation and optimized sampling strategy for Lake Erie using a data assimilative model. J. Great Lakes Res. 2020, 46, 144–158. [Google Scholar] [CrossRef]
- Wuebbles, D.; Cardinale, B.; Cherkauer, K.; Davidson-Arnott, R.; Hellmann, J.; Infante, D.; Ballinger, A. An Assessment of the Impacts of Climate Change on the Great Lakes; Environmental Law & Policy Center: Chicago, IL, USA, 2019. [Google Scholar]
- Xue, P.; Ye, X.; Pal, J.S.; Chu, P.Y.; Kayastha, M.B.; Huang, C. Climate Projections over the Great Lakes Region: Using Two-way Coupling of a Regional Climate Model with a 3-D Lake Model. Geosci. Model Dev. Discuss. 2022; in press. [Google Scholar]
- Notaro, M.; Holman, K.; Zarrin, A.; Fluck, E.; Vavrus, S.; Bennington, V. Influence of the Laurentian Great Lakes on regional climate. J. Clim. 2013, 26, 789–804. [Google Scholar] [CrossRef] [Green Version]
- Beletsky, D.; Hawley, N.; Rao, Y.R. Modeling summer circulation and thermal structure of Lake Erie. J. Geophys. Res. Ocean. 2013, 118, 6238–6252. [Google Scholar] [CrossRef] [Green Version]
- Xue, P.; Schwab, D.J.; Hu, S. An investigation of the thermal response to meteorological forcing in a hydrodynamic model of Lake Superior. J. Geophys. Res. Ocean. 2015, 120, 5233–5253. [Google Scholar] [CrossRef]
- Fujisaki, A.; Wang, J.; Bai, X.; Leshkevich, G.; Lofgren, B. Model-simulated interannual variability of Lake Erie ice cover, circulation, and thermal structure in response to atmospheric forcing, 2003–2012. J. Geophys. Res. Ocean. 2013, 118, 4286–4304. [Google Scholar] [CrossRef]
- Liu, Q.; Anderson, E.J.; Zhang, Y.; Weinke, A.D.; Knapp, K.L.; Biddanda, B.A. Modeling reveals the role of coastal upwelling and hydrologic inputs on biologically distinct water exchanges in a Great Lakes estuary. Estuar. Coast. Shelf Sci. 2018, 209, 41–55. [Google Scholar] [CrossRef]
- Anderson, E.J.; Fujisaki-Manome, A.; Kessler, J.; Lang, G.A.; Chu, P.Y.; Kelley, J.G.; Chen, Y.; Wang, J. Ice forecasting in the next-generation Great Lakes operational forecast system (GLOFS). J. Mar. Sci. Eng. 2018, 6, 123. [Google Scholar] [CrossRef] [Green Version]
- Ye, X.; Anderson, E.J.; Chu, P.Y.; Huang, C.; Xue, P. Impact of water mixing and ice formation on the warming of Lake Superior: A model-guided mechanism study. Limnol. Oceanogr. 2019, 64, 558–574. [Google Scholar] [CrossRef]
- Cushman-Roisin, B.; Beckers, J.M. Introduction to Geophysical Fluid Dynamics: Physical and Numerical Aspects; Academic Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Xue, P.; Malanotte-Rizzoli, P.; Wei, J.; Eltahir, E.A. Coupled ocean-atmosphere modeling over the Maritime Continent: A review. J. Geophys. Res. Ocean. 2020, 125, e2019JC014978. [Google Scholar] [CrossRef]
- Ibrahim, H.D.; Xue, P.; Eltahir, E.A. Multiple salinity equilibria and resilience of Persian/Arabian Gulf basin salinity to brine discharge. Front. Mar. Sci. 2020, 7, 573. [Google Scholar] [CrossRef]
- Fujisaki, A.; Wang, J.; Hu, H.; Schwab, D.J.; Hawley, N.; Rao, Y.R. A modeling study of ice–water processes for Lake Erie applying coupled ice-circulation models. J. Great Lakes Res. 2012, 38, 585–599. [Google Scholar] [CrossRef]
- Huang, C.; Anderson, E.; Liu, Y.; Ma, G.; Mann, G.; Xue, P. Evaluating essential processes and forecast requirements for meteotsunami-induced coastal flooding. Nat. Hazards 2021, 110, 1693–1718. [Google Scholar] [CrossRef]
- Sun, L.; Liang, X.Z.; Xia, M. Developing the Coupled CWRF-FVCOM Modeling System to Understand and Predict Atmosphere-Watershed Interactions Over the Great Lakes Region. J. Adv. Model. Earth Syst. 2020, 12, e2020MS002319. [Google Scholar] [CrossRef]
- Chapman, W.; Subramanian, A.; Delle Monache, L.; Xie, S.; Ralph, F. Improving atmospheric river forecasts with machine learning. Geophys. Res. Lett. 2019, 46, 10627–10635. [Google Scholar] [CrossRef]
- McGovern, A.; Elmore, K.L.; Gagne, D.J.; Haupt, S.E.; Karstens, C.D.; Lagerquist, R.; Smith, T.; Williams, J.K. Using artificial intelligence to improve real-time decision-making for high-impact weather. Bull. Am. Meteorol. Soc. 2017, 98, 2073–2090. [Google Scholar] [CrossRef]
- Scher, S. Toward data-driven weather and climate forecasting: Approximating a simple general circulation model with deep learning. Geophys. Res. Lett. 2018, 45, 12–616. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Racah, E.; Correa, J.; Khosrowshahi, A.; Lavers, D.; Kunkel, K.; Wehner, M.; Collins, W. Application of deep convolutional neural networks for detecting extreme weather in climate datasets. arXiv 2016, arXiv:1605.01156. [Google Scholar]
- Scher, S.; Messori, G. Predicting weather forecast uncertainty with machine learning. Q. J. R. Meteorol. Soc. 2018, 144, 2830–2841. [Google Scholar] [CrossRef]
- Zhao, W.L.; Gentine, P.; Reichstein, M.; Zhang, Y.; Zhou, S.; Wen, Y.; Lin, C.; Li, X.; Qiu, G.Y. Physics-constrained machine learning of evapotranspiration. Geophys. Res. Lett. 2019, 46, 14496–14507. [Google Scholar] [CrossRef]
- Brenowitz, N.D.; Bretherton, C.S. Prognostic validation of a neural network unified physics parameterization. Geophys. Res. Lett. 2018, 45, 6289–6298. [Google Scholar] [CrossRef]
- O’Donncha, F.; Zhang, Y.; Chen, B.; James, S.C. An integrated framework that combines machine learning and numerical models to improve wave-condition forecasts. J. Mar. Syst. 2018, 186, 29–36. [Google Scholar] [CrossRef] [Green Version]
- O’Donncha, F.; Zhang, Y.; Chen, B.; James, S.C. Ensemble model aggregation using a computationally lightweight machine-learning model to forecast ocean waves. J. Mar. Syst. 2019, 199, 103206. [Google Scholar] [CrossRef] [Green Version]
- Wei, J.; Jiang, G.Q.; Liu, X. Parameterization of typhoon-induced ocean cooling using temperature equation and machine learning algorithms: An example of typhoon Soulik (2013). Ocean Dyn. 2017, 67, 1179–1193. [Google Scholar] [CrossRef]
- Jiang, G.Q.; Xu, J.; Wei, J. A deep learning algorithm of neural network for the parameterization of typhoon-ocean feedback in typhoon forecast models. Geophys. Res. Lett. 2018, 45, 3706–3716. [Google Scholar] [CrossRef] [Green Version]
- Bolton, T.; Zanna, L. Applications of deep learning to ocean data inference and subgrid parameterization. J. Adv. Model. Earth Syst. 2019, 11, 376–399. [Google Scholar] [CrossRef] [Green Version]
- Feng, X.; Ma, G.; Su, S.F.; Huang, C.; Boswell, M.; Xue, P. A multi-layer perceptron approach for accelerated wave forecasting in Lake Michigan. Ocean Eng. 2020, 211, 107526. [Google Scholar] [CrossRef]
- Hu, H.; van der Westhuysen, A.J.; Chu, P.; FujisakiManome, A. Predicting Lake Erie wave heights using XGBoost and LSTM. Ocean Model. 2021, 164, 101832. [Google Scholar] [CrossRef]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Hammer, B. On the approximation capability of recurrent neural networks. Neurocomputing 2000, 31, 107–123. [Google Scholar] [CrossRef]
- Géron, A. Hands-On Machine Learning with Scikit-Learn, Keras, and TensorFlow: Concepts, Tools, and Techniques to Build Intelligent Systems; O’Reilly Media: Newton, MA, USA, 2019. [Google Scholar]
- Arnold, C.P., Jr.; Dey, C.H. Observing-systems simulation experiments: Past, present, and future. Bull. Am. Meteorol. Soc. 1986, 67, 687–695. [Google Scholar] [CrossRef] [Green Version]
- Xue, P.; Chen, C.; Beardsley, R.C.; Limeburner, R. Observing system simulation experiments with ensemble Kalman filters in Nantucket Sound, Massachusetts. J. Geophys. Res. Ocean. 2011, 116. [Google Scholar] [CrossRef] [Green Version]
- Xue, P.; Chen, C.; Beardsley, R.C. Observing system simulation experiments of dissolved oxygen monitoring in Massachusetts Bay. J. Geophys. Res. Ocean. 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Zeng, X.; Atlas, R.; Birk, R.J.; Carr, F.H.; Carrier, M.J.; Cucurull, L.; Hooke, W.H.; Kalnay, E.; Murtugudde, R.; Posselt, D.J.; et al. Use of observing system simulation experiments in the United States. Bull. Am. Meteorol. Soc. 2020, 101, E1427–E1438. [Google Scholar] [CrossRef]
- Saha, S.; Moorthi, S.; Wu, X.; Wang, J.; Nadiga, S.; Tripp, P.; Behringer, D.; Hou, Y.T.; Chuang, H.y.; Iredell, M.; et al. The NCEP climate forecast system version 2. J. Clim. 2014, 27, 2185–2208. [Google Scholar] [CrossRef]
- Jensen, R.E.; Cialone, M.A.; Chapman, R.S.; Ebersole, B.A.; Anderson, M.; Thomas, L. Lake Michigan Storm: Wave and Water Level Modeling; Technical report; Engineer Research and Development Center Vicksburg MS Coastal and Hydraulics Lab: Vicksburg, MS, USA, 2012. [Google Scholar]
- Huang, C.; Zhu, L.; Ma, G.; Meadows, G.A.; Xue, P. Wave Climate Associated With Changing Water Level and Ice Cover in Lake Michigan. Front. Mar. Sci. 2021, 8, 746916. [Google Scholar] [CrossRef]
- Schwab, D.J.; Leshkevich, G.A.; Muhr, G.C. Automated mapping of surface water temperature in the Great Lakes. J. Great Lakes Res. 1999, 25, 468–481. [Google Scholar] [CrossRef]
- Anderson, E.J.; Stow, C.A.; Gronewold, A.D.; Mason, L.A.; McCormick, M.J.; Qian, S.S.; Ruberg, S.A.; Beadle, K.; Constant, S.A.; Hawley, N. Seasonal overturn and stratification changes drive deep-water warming in one of Earth’s largest lakes. Nat. Commun. 2021, 12, 1–9. [Google Scholar] [CrossRef]
- Chen, C.; Beardsley, R.; Cowles, G.; Qi, J.; Lai, Z.; Gao, G.; Stuebe, D.; Xu, Q.; Xue, P.; Ge, J.; et al. An Unstructured-Grid, Finite-Volume Community Ocean Model: FVCOM User Manual; Sea Grant College Program, Massachusetts Institute of Technology Cambridge: Cambridge, MA, USA, 2012. [Google Scholar]
- Mellor, G.L.; Yamada, T. Development of a turbulence closure model for geophysical fluid problems. Rev. Geophys. 1982, 20, 851–875. [Google Scholar] [CrossRef] [Green Version]
- Smagorinsky, J. General circulation experiments with the primitive equations: I. The basic experiment. Mon. Weather Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Lundberg, S.M.; Lee, S.I. A unified approach to interpreting model predictions. Adv. Neural Inf. Process. Syst. 2017, 30, 4768–4777. [Google Scholar]
- Trumpickas, J.; Shuter, B.J.; Minns, C.K. Forecasting impacts of climate change on Great Lakes surface water temperatures. J. Great Lakes Res. 2009, 35, 454–463. [Google Scholar] [CrossRef]
- Toffolon, M.; Piccolroaz, S.; Majone, B.; Soja, A.M.; Peeters, F.; Schmid, M.; Wüest, A. Prediction of surface temperature in lakes with different morphology using air temperature. Limnol. Oceanogr. 2014, 59, 2185–2202. [Google Scholar] [CrossRef] [Green Version]
- Chen, R.; Wang, X.; Zhang, W.; Zhu, X.; Li, A.; Yang, C. A hybrid CNN-LSTM model for typhoon formation forecasting. GeoInformatica 2019, 23, 375–396. [Google Scholar] [CrossRef]
- Mathieu, M.; Henaff, M.; LeCun, Y. Fast training of convolutional networks through ffts. arXiv 2013, arXiv:1312.5851. [Google Scholar]
- Li, Z.; Kovachki, N.; Azizzadenesheli, K.; Liu, B.; Bhattacharya, K.; Stuart, A.; Anandkumar, A. Fourier neural operator for parametric partial differential equations. arXiv 2020, arXiv:2010.08895. [Google Scholar]
- Jiang, P.; Meinert, N.; Jordão, H.; Weisser, C.; Holgate, S.; Lavin, A.; Lütjens, B.; Newman, D.; Wainwright, H.; Walker, C.; et al. Digital Twin Earth–Coasts: Developing a fast and physics-informed surrogate model for coastal floods via neural operators. arXiv 2021, arXiv:2110.07100. [Google Scholar]
- Wang, J.X.; Wu, J.L.; Xiao, H. Physics-informed machine learning approach for reconstructing Reynolds stress modeling discrepancies based on DNS data. Phys. Rev. Fluids 2017, 2, 034603. [Google Scholar] [CrossRef] [Green Version]
- Read, J.S.; Jia, X.; Willard, J.; Appling, A.P.; Zwart, J.A.; Oliver, S.K.; Karpatne, A.; Hansen, G.J.; Hanson, P.C.; Watkins, W.; et al. Process-guided deep learning predictions of lake water temperature. Water Resour. Res. 2019, 55, 9173–9190. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Xu, S.; Tang, J.; Guan, K.; Griffis, T.J.; Erickson, M.D.; Frie, A.L.; Jia, X.; Kim, T.; Miller, L.T.; et al. KGML-ag: A modeling framework of knowledge-guided machine learning to simulate agroecosystems: A case study of estimating N2O emission using data from mesocosm experiments. Geosci. Model Dev. 2022, 15, 2839–2858. [Google Scholar] [CrossRef]
- Tsai, W.P.; Feng, D.; Pan, M.; Beck, H.; Lawson, K.; Yang, Y.; Liu, J.; Shen, C. From calibration to parameter learning: Harnessing the scaling effects of big data in geoscientific modeling. Nat. Commun. 2021, 12, 1–13. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values Tested | Optimal Value |
|---|---|---|
| Optimizer | Adam, SGD | Adam |
| LSTM layers | 2, 3, 4 | 3 |
| Activation units | (16, 8), (32, 16, 8), (32, 16, 16, 8), (64, 32, 16, 8) | (32, 16, 8) |
| Activations | ‘relu’, ‘tanh’, ‘sigmoid’ | ‘tanh’ |
| Dropout | 0.1, 0.2, 0.3, 0.4, 0.5 | 0.2 |
| Learning rate | 0.01, 0.001, 0.0001 | 0.001 |
| Epochs | 100, 200, 300, 500 | 300, 500 |
| Batch size | 32, 256, 1024, 2048 | 2048 |
| Validation Split | 0.2, 0.1, 0.05 | 0.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, P.; Wagh, A.; Ma, G.; Wang, Y.; Yang, Y.; Liu, T.; Huang, C. Integrating Deep Learning and Hydrodynamic Modeling to Improve the Great Lakes Forecast. Remote Sens. 2022, 14, 2640. https://doi.org/10.3390/rs14112640
Xue P, Wagh A, Ma G, Wang Y, Yang Y, Liu T, Huang C. Integrating Deep Learning and Hydrodynamic Modeling to Improve the Great Lakes Forecast. Remote Sensing. 2022; 14(11):2640. https://doi.org/10.3390/rs14112640
Chicago/Turabian StyleXue, Pengfei, Aditya Wagh, Gangfeng Ma, Yilin Wang, Yongchao Yang, Tao Liu, and Chenfu Huang. 2022. "Integrating Deep Learning and Hydrodynamic Modeling to Improve the Great Lakes Forecast" Remote Sensing 14, no. 11: 2640. https://doi.org/10.3390/rs14112640
APA StyleXue, P., Wagh, A., Ma, G., Wang, Y., Yang, Y., Liu, T., & Huang, C. (2022). Integrating Deep Learning and Hydrodynamic Modeling to Improve the Great Lakes Forecast. Remote Sensing, 14(11), 2640. https://doi.org/10.3390/rs14112640