
Ocean Wave Inversion Based on Hybrid Along- and Cross-Track Interferometry


 , ,
, ,
Abstract
:
1. Introduction
2. Algorithm of Ocean Wave Inversion
2.1. Inversion Algorithm of the Sea Surface Profile
2.2. Orbital Velocity of Long Waves Inversion Algorithm
3. Experimental Data
3.1. Hybrid InSAR Images

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Spaceborne InSAR System | Airborne IRA |
|---|---|---|
| Center frequency | 9.65 GHz | 35 GHz |
| B | 301.92 m | 0.30 m |
| Bv | 290.06 m | 0.299 m |
| Bp | 83.78 m | 0.021 m |
| Azimuth resolution | 3.30 m | 0.30 m |
| Ground range resolution | 2.26 m | 0.30 m |
| θ | 29.83–32.78° | 1–15° |
3.2. Reference Data
| Parameters | Parameter Values |
|---|---|
| Spatial range | Global scale |
| Spatial resolution | 0.5 × 0.5° |
| Time range | 1979– |
| Temporal resolution | 1 h |
4. Images Preprocessing
4.1. Images Registration
4.2. Random Phase Noise Suppression
4.3. The Flat Earth Effect Removal
5. Ocean Wave Inversion and Discussion
5.1. Sea Surface Profile Inversion
5.2. The Orbital Velocity of Ocean Waves Inversion
6. Conclusions
- (1)
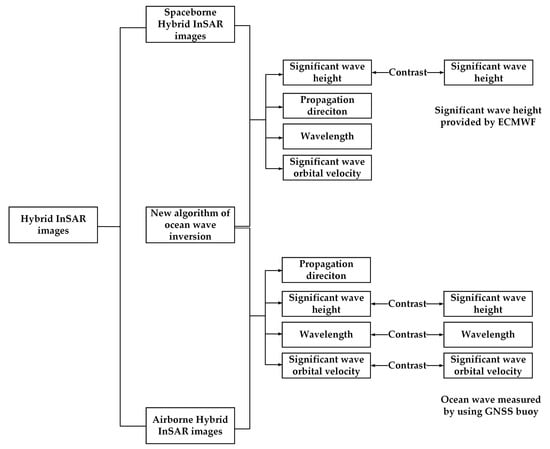
- On the basis of the spaceborne hybrid InSAR images acquired by the TerraSAR-X and TanDEM-X and the hybrid InSAR images acquired by airborne IRA, ocean waves, ocean waves spectra, orbital velocities of ocean waves, and the velocity spectra were retrieved using a new method. For the spaceborne hybrid InSAR images, since the effects of the orbital velocity and the acceleration of the water waves, only swell were well retrieved from the satellite SAR images in the present work. For the airborne hybrid InSAR images used in this paper, due to the nonlinear influence of the velocity bunching along the azimuth direction, only swells could be retrieved well;
- (2)
- Based on the ocean wave spectra and velocity spectra retrieved using this method, we calculated SWHs, peak wavelengths of dominant waves, and SWVs. In addition, we also obtained the propagation direction of the dominant waves in A1, A2, A3, and A4 on the basis of the retrieved cross-spectra. The wavelengths of dominant waves in A1 and A2 were consistent with those mentioned by Romeiser [43], and the differences between the retrieved SWHs in A1 and A2 and that provided by ECMWF were small, while the differences between the retrieved SWHs in A3 and A4 and that provided by ECMWF were large, which was mainly caused by the strong nonlinear influence of velocity bunching in A3 and A4. The differences between the retrieved SWHs using the M920 and M3120 images and that measured by the GNSS buoy were small, while the retrieved SWVs using the M920 and M3120 images were significantly smaller than that measured by the GNSS buoy. The significant differences were because the SWVs measured by the GNSS buoy included the SWVs of swells and wind waves, and for the retrieved SWVs, due to the strong nonlinear influence of velocity bunching, only the orbital velocity of the swells could be retrieved;
- (3)
- There was a close relationship between the accuracy of the retrieved ocean wave spectrum, orbital velocity spectrum, and velocity bunching. When the nonlinear influence of the velocity bunching was strong, the accuracy of the retrieved ocean wave spectrum and orbital velocity spectrum was low, and when the nonlinear influence of the velocity bunching was weak, the accuracy of the retrieved ocean wave spectrum and orbital velocity spectrum was high. Therefore, addressing the nonlinear influence of velocity bunching on ocean wave inversion is still a challenge in future work. Moreover, since the airborne hybrid interferometric images used in this paper all had strong velocity bunching nonlinearity, the accurate evaluation of ocean wave inversion based on the airborne hybrid interference images with small velocity bunching nonlinearity is also an important task in the future.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hasselmann, S.; Brüning, C.; Hasselmann, K.; Heimbach, P. An improved algorithm for the retrieval of ocean wave spectra from synthetic aperture radar image spectra. J. Geophys. Res. 1996, 101, 16615–16629. [Google Scholar] [CrossRef]
- Yu, H.M.; Li, J.Y.; Wu, K.J.; Wang, Z.F.; Yua, H.Q.; Zhang, S.Q.; Hou, Y.J.; Kelly, R.M. A global high-resolution ocean wave model improved by assimilating the satellite altimeter significant wave height. Int. J. Appl. Earth Obs. Geoinf. 2018, 70, 43–50. [Google Scholar] [CrossRef]
- Jiang, Q.F.; Xu, Y.S.; Sun, H.W.; Wei, L.D.; Yang, L.; Zheng, Q.; Jiang, H.Y.; Zhang, X.G.; Qian, C.C. Wind-generated gravity waves retrieval from high-resolution 2-D maps of sea surface elevation by airborne interferometric altimeter. IEEE Trans. Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Shemer, L.; Kit, E. Simulation of an interferometric synthetic aperture radar imagery of an ocean system consisting of a current and a monochromatic wave. J. Geophys. Res. 1991, 96, 22063–22073. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, Y.M.; Wang, Y.H.; Bai, Y.N.; Zhang, Y.S.; Li, X. Numerical Simulation of SAR Image for Sea Surface. Remote Sens. 2022, 14, 439. [Google Scholar] [CrossRef]
- Wei, X.F.; Chong, J.S.; Zhao, Y.W.; Li, Y.; Yao, X.N. Airborne SAR Imaging Algorithm for Ocean Waves Based on Optimum Focus Setting. Remote Sens. 2019, 11, 564. [Google Scholar] [CrossRef] [Green Version]
- Grieco, G.; Lin, W.; Migliaccio, M.; Nirchio, F.; Portabella, M. Dependency of the Sentinel-1 azimuth wavelength cut-off on significant wave height and wind speed. Int. J. Remote Sens. 2016, 37, 5086–5104. [Google Scholar] [CrossRef]
- Hasselmann, K.; Hasselmann, S. On the nonlinear mapping of an ocean wave spectrum into a synthetic aperture radar image spectrum and its inversion. J. Geophys. Res. 1991, 96, 10713–10729. [Google Scholar] [CrossRef]
- Engen, G.; Johnsen, H. SAR-ocean wave inversion using image cross spectra. IEEE Trans. Geosci. Remote Sens. 1995, 33, 1047–1056. [Google Scholar] [CrossRef]
- Schulz-Stellenfleth, J.; Lehner, S.; Hoja, D. A parametric scheme for the retrieval of two-dimensional ocean wave spectra from synthetic aperture radar look cross spectra. J. Geophys. Res. 2005, 110, C05004. [Google Scholar] [CrossRef] [Green Version]
- Marghany, M.; Ibrahim, Z.; Genderen, J.V. Azimuth cut-off model for significant wave height investigation along coastal water of Kuala Terengganu, Malaysia. Int. J. Appl. Earth Obs. Geoinf. 2002, 4, 147–160. [Google Scholar] [CrossRef]
- Ren, L.; Yang, J.S.; Zheng, G.; Wang, J. Significant wave height estimation using azimuth cutoff of C-band RADARSAT-2 single-polarization SAR images. Acta Oceanol. Sin. 2015, 34, 93–101. [Google Scholar] [CrossRef]
- Schuler, D.L.; Lee, J.S.; Kasilingam, D.; Pottier, E. Measurement of ocean surface slopes and wave spectra using polarimetric SAR image data. Remote Sens. Environ. 2004, 91, 198–211. [Google Scholar] [CrossRef]
- He, Y.J.; Shen, H.; Perrie, W. Remote sensing of ocean waves by polarimetric SAR. J. Atmos. Ocean Technol. 2006, 23, 1768–1773. [Google Scholar] [CrossRef]
- He, Y.J.; Perrie, W.; Xie, T.; Zou, Q.P. Ocean wave spectra from a linear polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2623–2631. [Google Scholar]
- Zhang, B.; Perrie, W.; He, Y.J. Validation of RADARSAT-2 fully polarimetric SAR measurements of ocean surface waves. J. Geophys. Res. 2010, 115, C06031. [Google Scholar] [CrossRef]
- Wang, H.; Mouche, A.; Husson, R.; Grouaze, A.; Chapron, B.; Yang, J.S. Assessment of Ocean Swell Height Observations from Sentinel-1A/B Wave Mode against Buoy In Situ and Modeling Hindcasts. Remote Sens. 2022, 14, 862. [Google Scholar] [CrossRef]
- Caponi, E.A.; Crawford, D.R.; Yuen, H.C.; Saffman, P.G. Modulation of radar backscatter from the ocean by a variable current. J. Geophys. Res. 1988, 93, 12249–12263. [Google Scholar] [CrossRef]
- Zhang, Y.M.; Wang, Y.H.; Xu, Q.H. On the nonlinear mapping of an ocean wave spectrum into a new polarimetric SAR image spectrum. J. Phys. Oceanogr. 2020, 50, 3109–3122. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Zebker, H.A. Interferometric radar measurement of ocean surface currents. Nature 1987, 328, 707–709. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Barnett, T.P.; Zebker, H.A. Remote sensing of ocean currents. Science 1990, 246, 1282–1285. [Google Scholar] [CrossRef] [PubMed]
- Marom, M.; Goldstein, R.M.; Thornton, E.B.; Shemer, L. Remote sensing of ocean wave spectra by interferometric synthetic aperture radar. Nature 1990, 345, 793–795. [Google Scholar] [CrossRef]
- Marom, M.; Shemer, L.; Thornton, E.B. Energy density directional spectra of a nearshore wave field measured by interferometric synthetic aperture radar. J. Geophys. Res. 1991, 96, 22125–22134. [Google Scholar] [CrossRef]
- Lyzenga, D.R.; Bennett, J.R. Estimation of ocean wave spectra using two-antenna SAR system. IEEE Trans. Geosci. Remote Sens. 1991, 29, 463–465. [Google Scholar] [CrossRef]
- Lyzenga, D.R.; Malinas, P. Azimuth falloff effects in two-antenna SAR measurements of ocean wave spectra. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1020–1027. [Google Scholar] [CrossRef]
- Bao, M.Q.; Bruning, C.; Alpers, W. Simulation of ocean waves imaging by an along-track interferometric synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 1997, 35, 618–631. [Google Scholar]
- Bao, M.Q.; Alpers, W.; Bruning, C. A new nonlinear integral transform relating ocean wave spectra to phase image spectra of an along track interferometric synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 1999, 37, 461–466. [Google Scholar]
- Vachon, P.W.; Campbell, J.W.M.; Gray, A.L.; Dobson, F.W. Validation of along-track interferometric SAR measurements of ocean surface waves. IEEE Trans. Geosci. Remote Sens. 1999, 37, 150–162. [Google Scholar] [CrossRef]
- He, Y.J.; Alpers, W. On the nonlinear integral transform of an ocean wave spectrum into an along-track interferometric synthetic aperture radar image spectrum. J. Geophys. Res. 2003, 108, 461–466. [Google Scholar] [CrossRef]
- Zhang, B.; Perrie, W.; He, Y.J. Remote sensing of ocean waves by along-track interferometric synthetic aperture radar. J. Geophys. Res. 2009, 114, C10015. [Google Scholar] [CrossRef] [Green Version]
- Bao, M.Q. A nonlinear integral transform between ocean wave spectra and phase image spectra of a cross-track interferometric SAR. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 28 June–2 July 1999; Volume 5, pp. 2619–2621. [Google Scholar]
- Schulz-Stellenfleth, J.; Lehner, S. Ocean wave imaging using an airborne single pass across-track interferometric synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2001, 39, 38–45. [Google Scholar] [CrossRef]
- Schulz-Stellenfleth, J.; Horstmann, J.; Lehner, S.; Rosenthal, W. Sea surface imaging with an across track interferometric synthetic aperture radar: The SINEWAVE experiment. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2017–2028. [Google Scholar] [CrossRef]
- Werner, M. Shuttle radar topography mission (SRTM)-mission overview. Frequenz 2001, 55, 3–4. [Google Scholar] [CrossRef]
- Lehner, S.; Gunther, H.; Horstmann, J.; Bao, M.Q.; Schulz-Stellenfleth, J. Joint along-across track interferometry of ocean waves. In Proceedings of the IEEE 2001 International Geoscience and Remote Sensing Symposium, Sydney, NSW, Australia, 9–13 July 2001; Volume 1, pp. 581–583. [Google Scholar]
- Siegmund, R.; Bao, M.Q.; Lehner, S.; Niedermeier, A.; Mayerle, R. Surface currents imaged with hybrid along and cross track interferometry. In Proceedings of the IEEE 2001 International Geoscience and Remote Sensing Symposium, Sydney, NSW, Australia, 9–13 July 2001; Volume 7, pp. 3146–3148. [Google Scholar]
- Siegmund, R.; Bao, M.Q.; Lehner, S.; Mayerle, R. First demonstration of surface currents imaged by hybrid along- and cross-track interferometric SAR. IEEE Trans. Geosci. Remote Sens. 2004, 42, 511–519. [Google Scholar] [CrossRef]
- Bao, M.Q.; Schulz-Stellenfleth, J.; Lehner, S.; Eineder, M. First results on ocean wave imaging from the shuttle radar topography mission. In Proceedings of the IEEE 2001 International Geoscience and Remote Sensing Symposium, Sydney, NSW, Australia, 9–13 July 2001; Volume 1, pp. 584–586. [Google Scholar]
- Gao, D.; Liu, Y.X.; Meng, J.M.; Jia, Y.J.; Fan, C.Q. Estimating significant wave height from SAR imagery based on an SVM regression model. Acta Oceanol. Sin. 2018, 37, 103–110. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Y.S.; Zhou, X.H.; Zhu, L.; Jiang, Q.F.; Sun, H.W.; Chen, G.; Wang, P.L.; Mertikas, S.P.; Fu, Y.G.; et al. Calibration of an Airborne Interferometric Radar Altimeter over the Qingdao Coast Sea, China. Remote Sens. 2020, 12, 1651. [Google Scholar] [CrossRef]
- Sun, D.Z.; Zhang, Y.M.; Wang, Y.H.; Chen, G.; Sun, H.W.; Yang, L.; Bai, Y.N.; Yu, F.J.; Zhao, C.F. Ocean wave inversion based on airborne IRA images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1001013. [Google Scholar] [CrossRef]
- Romeiser, R. Current Measurements by Airborne Along-Track InSAR: Measuring Technique and Experimental Results. IEEE Trans. Geosci. Remote Sens. 2002, 30, 552–569. [Google Scholar] [CrossRef]
- Romeiser, R.; Runge, H.; Suchandt, S.; Kahle, R.; Rossi, C.; Bell, P.S. Quality assessment of surface current fields from TerraSAR-X and TanDEM-X along-track interferometry and doppler centroid analysis. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2759–2772. [Google Scholar] [CrossRef] [Green Version]
- Gabriel, A.K.; Goldstein, R.M. Crossed orbit interferometry: Theory and experimental results from SIR-B. Int. J. Remote Sens. 1988, 9, 857–872. [Google Scholar] [CrossRef]
- Lin, Q.; Vesecky, J.F.; Zebker, H.A. New approaches in interferometic SAR data processing. IEEE Trans. Geosci. Remote Sens. 1992, 30, 560–567. [Google Scholar] [CrossRef]
- Stone, S.; Orchard, M.T.; Chang, E.C.; Martucci, S.A. A fast direct Fourier-based algorithm for subpixel registration of images. IEEE Trans. Geosci. Remote Sens. 2002, 39, 2235–2243. [Google Scholar] [CrossRef] [Green Version]
- Rabus, B.; Eineder, M.; Roth, A.; Bamler, R. The shuttle radar topography mission—A new class of digital elevation models acquired by spaceborne radar. ISPRS J. Photogramm. 2003, 57, 241–262. [Google Scholar] [CrossRef]
- Fritz, T.; Rossi, C.; Yague-Martinez, N.; Rodriguez, F. Interferometric processing of TanDEM-X data. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 2428–2431. [Google Scholar] [CrossRef]
- Ouchi, K.; Maedoi, S.; Mitsuyasu, H. Determination of ocean wave propagation direction by split-look processing using JERS-1 SAR data. IEEE Trans. Geosci. Remote Sens. 1999, 37, 849–855. [Google Scholar] [CrossRef]
- Bao, M.Q.; Alpers, W. On the cross spectrum between individual-look synthetic aperture radar images of ocean waves. IEEE Trans. Geosci. Remote Sens. 1998, 36, 922–932. [Google Scholar]














| Column Number | NL = 10 | NL = 20 | NL = 40 | NL = 60 | NL = 80 | NL = 100 | NL = 120 | NL = 140 | NL = 160 |
|---|---|---|---|---|---|---|---|---|---|
| 700th | 25.76 | 13.45 | 9.15 | 7.81 | 6.90 | 6.16 | 5.77 | 5.47 | 5.18 |
| 2200th | 86.74 | 32.25 | 11.62 | 8.84 | 7.48 | 6.58 | 6.07 | 5.74 | 5.27 |
| Areas | A1 | A2 | A3 | A4 |
|---|---|---|---|---|
| λp | 210 m | 209 m | 292 m | 305 m |
| Direction | 100° | 100° | 230° | 230° |
| SWV | 0.57 m/s | 0.80 m/s | 0.56 m/s | 0.58 m/s |
| SWVSP | 0.46 m/s | 0.61 m/s | 0.13 m/s | 0.15 m/s |
| SWH | 0.79 m | 1.05 m | 0.64 m | 0.67 m |
| SWHSP | 0.75 m | 0.92 m | 0.32 m | 0.34 m |
| SWHEC | 0.74 m | 1.09 m | 0.87 m | 0.71 m |
| Parameters | M920 | M3120 | |
|---|---|---|---|
| SWV | IRA | 0.31 m/s | 0.32 m/s |
| Buoy | 0.64 m/s | 0.68 m/s | |
| SWVSP | IRA | 0.23 m/s | 0.23 m/s |
| Buoy | 0.64 m/s | 0.68 m/s | |
| SWH | IRA | 0.37 m | 0.38 m |
| Buoy | 0.33 m | 0.38 m | |
| SWHSP | IRA | 0.28 m | 0.29 m |
| Buoy | 0.33 m | 0.38 m | |
| SWHC | IRA | 0.39 m | 0.39 m |
| SWHSPC | IRA | 0.31 m | 0.32 m |
| Direction | IRA | 270° (Swell) | 270° (Swell) |
| Buoy | |||
| λp | IRA | 87.27 m (Swell) | 89.76 m (Swell) |
| Buoy | 70.69 m (Swell) 12.85 m (Wind waves) | 100.98 m (Swell) 17.67 m (Wind waves) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, D.; Wang, Y.; Xu, Z.; Zhang, Y.; Zhang, Y.; Meng, J.; Sun, H.; Yang, L. Ocean Wave Inversion Based on Hybrid Along- and Cross-Track Interferometry. Remote Sens. 2022, 14, 2793. https://doi.org/10.3390/rs14122793
Sun D, Wang Y, Xu Z, Zhang Y, Zhang Y, Meng J, Sun H, Yang L. Ocean Wave Inversion Based on Hybrid Along- and Cross-Track Interferometry. Remote Sensing. 2022; 14(12):2793. https://doi.org/10.3390/rs14122793
Chicago/Turabian StyleSun, Daozhong, Yunhua Wang, Zhichao Xu, Yanmin Zhang, Yubin Zhang, Junmin Meng, Hanwei Sun, and Lei Yang. 2022. "Ocean Wave Inversion Based on Hybrid Along- and Cross-Track Interferometry" Remote Sensing 14, no. 12: 2793. https://doi.org/10.3390/rs14122793
APA StyleSun, D., Wang, Y., Xu, Z., Zhang, Y., Zhang, Y., Meng, J., Sun, H., & Yang, L. (2022). Ocean Wave Inversion Based on Hybrid Along- and Cross-Track Interferometry. Remote Sensing, 14(12), 2793. https://doi.org/10.3390/rs14122793