2.1. A Brief Review of the VMD Algorithm
In the VMD algorithm, an IMF is defined as an amplitude-frequency modulation (AM−FM) signal based on the modulation criterion,
where
is the phase of
and
;
is the instantaneous amplitude of
and
;
is the instantaneous frequency of
and
. The rate of change of
and
is slower than that of the phase
, i.e., over a sufficiently long time horizon
,
is approximated as a harmonic signal with amplitude
and frequency
.
According to Carson’s Rule, the newly defined IMF bandwidth is estimated to be:
where
is the maximum deviation of the instantaneous frequency;
is the offset rate of the instantaneous frequency;
is the highest frequency of the envelope
.
The VMD algorithm continuously updates the central frequency and bandwidth of each IMF component iteratively in the process of solving the variational mode, and finally, the adaptive segmentation of the signal frequency band can be completed according to the frequency characteristics of the signal to obtain several narrowband IMFs. Assuming that the original signal is decomposed into
K IMFs by VMD, the corresponding constrained variational mode expression is as follows:
here,
are
K IMFs decomposed by the VMD method,
is the central angular frequency of each IMF component
,
is the partial derivative of the function of time,
is the Dirac function,
is an imaginary unit, and
indicates convolution.
To solve the optimal solution of the above constrained variational problem, the quadratic penalty function term
and the Lagrange multiplier operator
are introduced, resulting in the extended Lagrange expression.
where
is the penalty parameter, which is generally set to a positive number large enough to ensure the reconstruction accuracy of the signal.
is Lagrange multipliers. A detailed description can be found in the related literature [
11,
12,
13,
14].
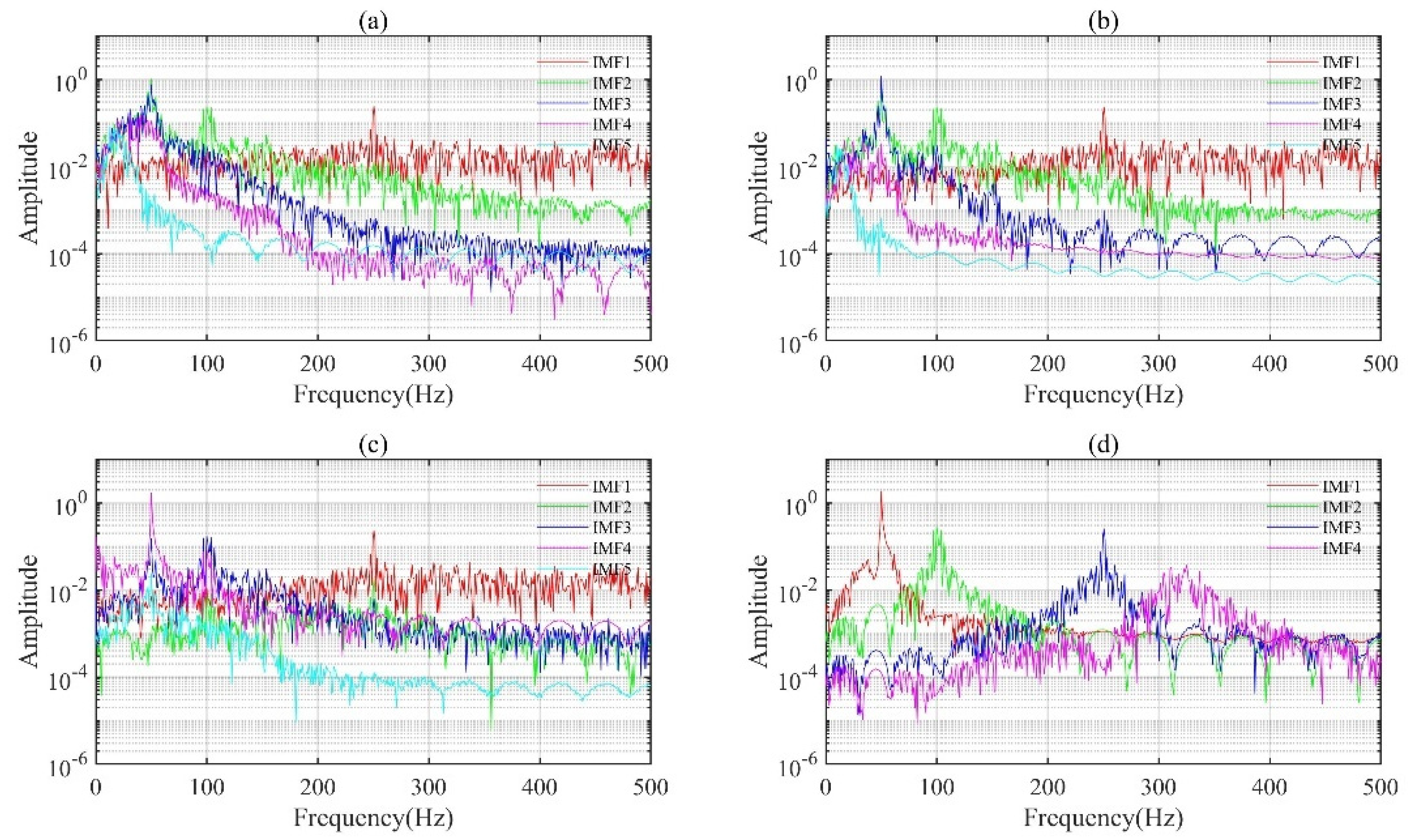
We synthesize a signal by 50 Hz, 100 Hz, 250 Hz sinusoidal waves, and Gaussian white noise. Then the synthesized signal is decomposed by EMD, EEMD, CEEMD, and VMD, respectively. The four decomposed IMFs are shown in the frequency domain in
Figure 1. It can be seen clearly in
Figure 1d that the VMD algorithm decomposes the frequency components of 50 Hz, 100 Hz, and 250 Hz into IMF1, IMF2, and IMF3 independently, which overcomes the mode−mixing problem. Compared with IMFs from VMD, more IMFs are decomposed by EMD, EEMD, and CEEMD methods, which show overlapped frequency ranges to some extent, as shown in
Figure 1a–c.
2.2. The Optimization Algorithm for VMD Parameters α and K Based on PSO
Normally, the VMD algorithm decomposes the signal by manually pre−determining the number of IMFs K and the value of the penalty parameter . The smaller the value of is, the wider the bandwidths of the resulting IMFs are; the larger the value of K is, the narrower the bandwidths of the IMFs are. It is very important to determine these two parameters quickly and accurately as they affect the decomposition results directly. We apply the PSO algorithm to search the values of K and automatically in VMD processing.
The idea of the PSO algorithm originated from the foraging behavior of a flock of birds, where the flock finds the optimal destination by sharing information collectively [
15]. Imagine a scenario in which a flock of birds randomly searches for food in a forest and they want to find the location with the largest amount of food. All the birds can only sense the approximate direction of the food, but they do not know exactly where the food is. Each bird searches in the direction it decides, and during the search, it records the location of the largest amount of food it has ever found and shares the location and amount of food with other birds so that all the birds can know where the largest amount of food is at present. During this process, each bird adjusts its search direction according to the location of the largest amount of food in its memory and records from the current flock. After a period of searching, the flock can find out the location of the largest amount of food in the forest, i.e., the global optimal solution is obtained.
The PSO algorithm first randomly initializes the particle swarm in a given space, and each particle has a fitness value corresponding to the objective function being optimized. Each particle decides the distance and direction of flight based on its individual experience and the experience of its neighbors so that the particle swarm searches for the optimal solution in the solution space from generation to generation with the current optimally located particles.
Let the population consisting of
M particles in a
D−dimensional space be
, the position of the first particle is
. The individual optimal position of each particle during the flight is
, where the individual optimal position at which the first particle is
, i.e., the individual local extremes. The optimal position of the
g−th particle throughout the flight is
, i.e., the population global extremum. The
i−th particle travels at the speed of
. The velocity and position of each particle flight are updated continuously and iteratively by the two extremums:
where
;
;
are inertia weights;
is the number of current iterations;
are the acceleration constant;
is a random number.
In this paper, we use the envelope entropy as the fitness function [
17]. The smaller the envelope entropy is, the better the fitting is. The envelope entropy
is calculated by
where signal
is obtained from the signal
by Hilbert transform, and
is the normalized form of the envelope signal
.
can represent the sparsity of the original signal quantitatively. The smaller the value of
is, the sparser the signal is, and the less noise it contains. Conversely, the larger the value of
is, the weaker the signal sparsity is, and the more noise it contains.
After a certain is selected, are obtained through VMD decomposition. Then the value of each IMF component is calculated separately, and the smallest value among them is found as the local minimum entropy value. The is used as the fitness function, and the local minimal value is used as the search target.
The best search process in the VMD algorithm is summarized as follows:
(1) determine the initial parameters of the PSO and the envelope entropy as the fitness function;
(2) generate the positions of particles randomly in some particle populations and their velocities of movement;
(3) process the signal by VMD at different positions and calculate of the corresponding for each particle position;
(4) update individual local extremes and population global extremes through comparison of the magnitude of ;
(5) update the velocity and position of particles;
(6) loop the steps (3)−(5), then end the loop when the number of iterations reaches a threshold and outputs the best particle position .
To check the validity of the method, as an example, we synthesize a signal by Equation (7), including cosine signals of 5 Hz, 20 Hz, 40 Hz, 60 Hz, 80 Hz, 100 Hz, and 120 Hz, respectively.
The synthetic signal is decomposed by VMD, whose parameters are determined automatically by the PSO algorithm. The initial parameters of the PSO algorithm were set as follows: evolutionary generation of 10, the population size of 10, inertia weight of 1.5, and acceleration constant of 1.5 and 1.0, respectively. In the PSO algorithm, the inertia weight coefficient determines how much of the last iteration speed is retained. Choosing 1.5 as inertia weight is because a larger one can give the algorithm strong global search ability. The acceleration constant determines the size of the particle learning amount for the optimal position, and the optimal range of the acceleration constant is determined from 0.5 to 2.5 by the Benchmark function set.
The initial positions of the particles and their entropy value are shown in
Figure 2a, where the color shows the entropy value. The minimum value of the local minimal entropy value 6.152145 appears in the 5th generation, as shown in
Figure 2b, and the optimal combination of parameters obtained by the optimization search is
, as shown in
Figure 2c, which is marked in a red circle. The parameter-optimized VMD yields seven IMFs, whose waveforms are shown in
Figure 3a−g and corresponding spectra in
Figure 3h−n, respectively. IMFs 1−7 correspond to the frequency components of 5 Hz, 80 Hz, 120 Hz, 100 Hz, 60 Hz, 20 Hz, and 40 Hz, respectively. The synthetic example proves the effectiveness of PSO-based parameter−optimized VMD.
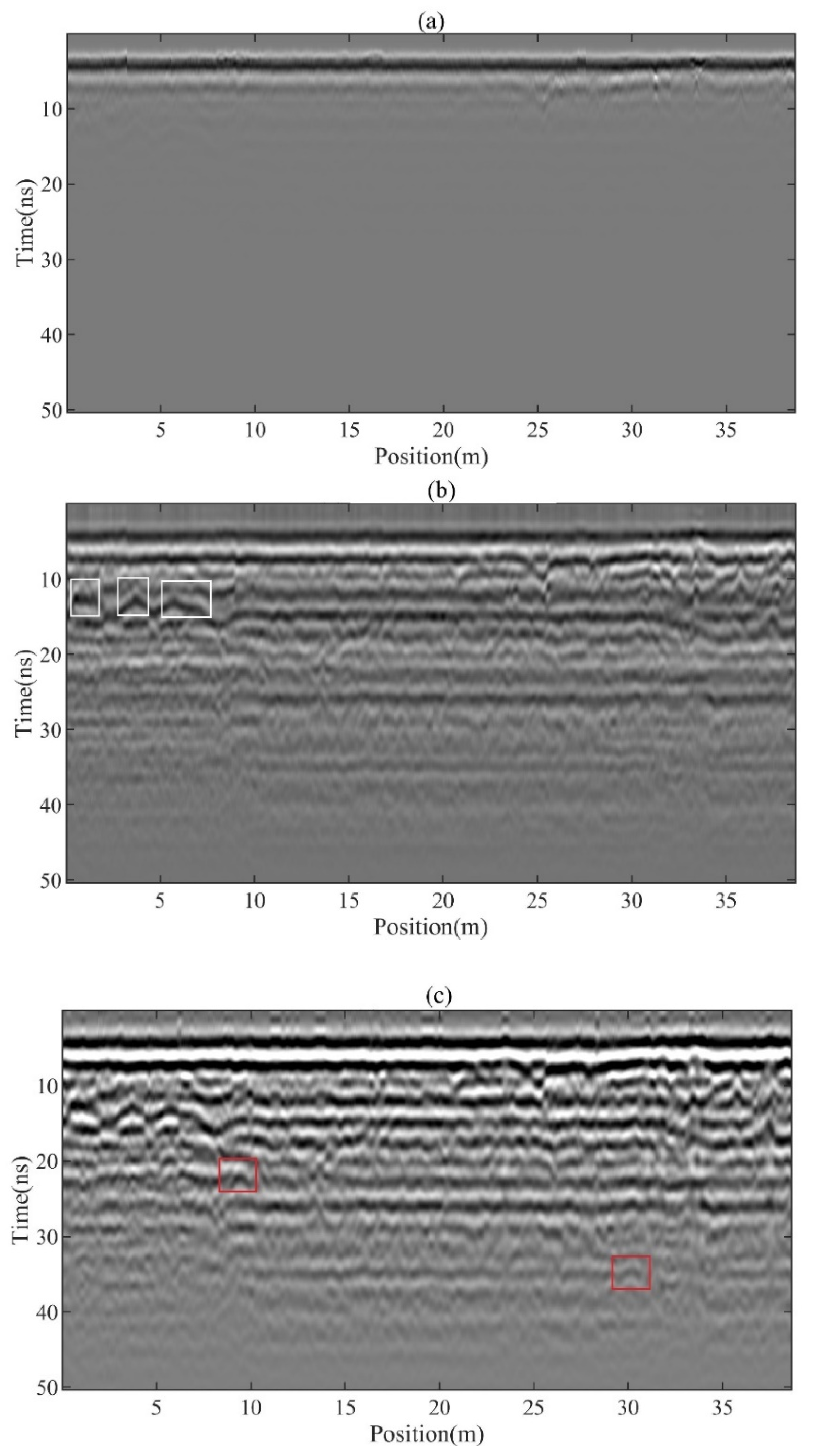
2.3. The Proposed GPR Data Denoising Method
As effective signal denoising and reconstruction method, VMD still suffers the problem of manually selecting the parameters like K . Based on the above study, a PSO-based VMD denoising method for the GPR profile is proposed here. The specific implementation steps are as follows when this method is applied to the real field data.
(1) We first pre−process GPR data using conventional methods like time-zero correction, direct current (DC) component removal, gain or automatic gain control (AGC), band-pass filtering et al., which can be selected on a case-by-case basis.
(2) Then the average trace of GPR data is obtained, for which the PSO algorithm is used to search for the best combination of parameters in the VMD.
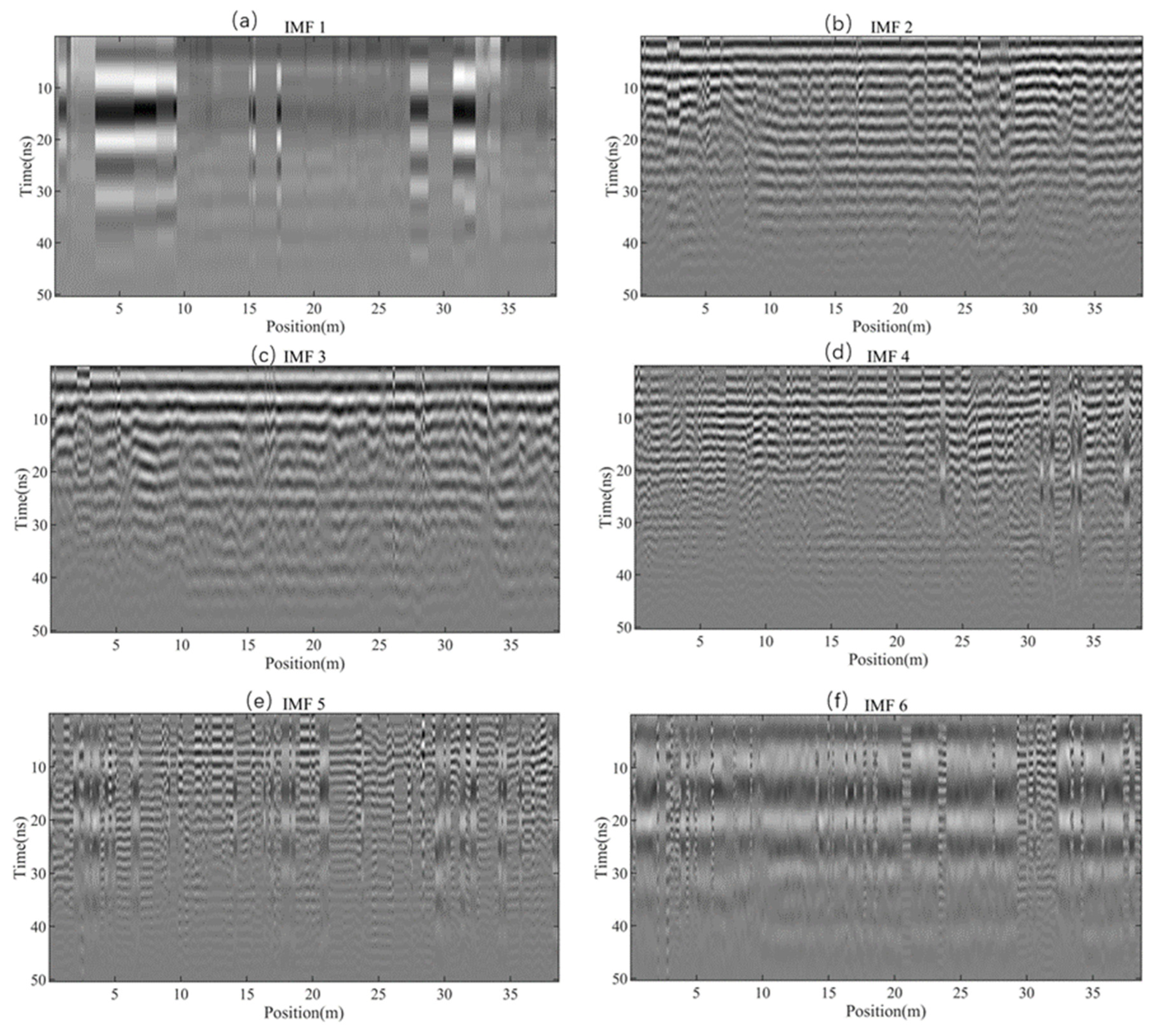
(3) Next, the GPR data are decomposed trace by trace using VMD, and K IMFs from each trace are obtained. Therefore, the original GPR profile generates K profiles of IMF with different features.
(4) The last step is data reconstruction which is to select the useful IMF profiles for superposition so that the target signal is revealed by removing the useless IMFs which represent noise. How can we determine which IMFs are useful? Similarly, we abandon manual experience judgment and propose a gauging method based on SNR and RMSE.
The SNR and RMSE are calculated as follows:
where
is the noise-containing signal,
is the signal after noise reduction,
N is the number of sampling points, and
M is the number of traces. The higher SNR indicates that the more effective information is contained in the signal with a better noise reduction effect. RMSE is a measure of the deviation of the noise reduction signal from the mean value of the original data. The smaller the root mean square error is, the better the noise reduction effect is.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}