1. Introduction
Weather observations provide essential information for data assimilation and forecasting of the atmosphere, which is especially important for high-impact weather such as tropical cyclones. The atmospheric motion vectors (AMVs) supplement direct observations of the vector wind field provided by conventional data (e.g., rawinsondes). Conventional data are unevenly distributed and often concentrated over land. AMVs help to fill in data void regions in the initialization of the Hurricane Weather and Forecasting (HWRF) model used for tropical cyclone forecasting. These AMVs are derived by tracking the horizontal motion of atmospheric fields such as clouds or water vapor gradients from consecutive geostationary satellite images [
1], thus having large spatial coverage and more frequent observations.
Numerical Weather Prediction (NWP) Centers have used AMVs from earlier geostationary satellites in their global and/or regional models after showing improved forecast skill [
2,
3,
4,
5,
6]. The abundance of high temporal and spatial resolution satellite AMVs in the tropics is especially beneficial around tropical cyclones. The authors of [
7] showed that the assimilation of these AMVs have improved analyses and intensity forecasts of tropical cyclones, most notably in the upper outflow regions. Assimilation studies using hourly AMVs conducted by the U.S. Navy, using the Navy Operational Global Atmospheric Prediction System [
8], showed positive impacts in tropical cyclone track forecasts [
9,
10,
11]. Refs. [
7,
12,
13,
14,
15] concluded that variational assimilation techniques produce a 100–200 km reduction in tropical cyclone mean track errors when hourly cloud-drift AMVs from Geostationary Operational Environmental Satellite GOES-8 and Geostationary Meteorological Satellite-5 were assimilated. Ref. [
16] showed that the assimilation of all five types of hourly AMVs from GOES-13 into operational HWRF helped to improve many of the tropical cyclone forecast metrics.
GOES-16, the first of the United States’ third-generation geostationary satellite in the GOES-R series, was launched on 19 November 2016. One of the instruments onboard GOES-16 is the Advanced Baseline Imager (ABI) [
17]. ABI is a 16-band radiometer covering the visible, near-infrared, and infrared portions of the electromagnetic spectrum with four times the spatial resolution and five times faster coverage than instruments on earlier GOESs. ABI is capable of handling multiple scan scenarios. Scan scenario 6 is the default and most commonly used. With scan scenario 6, full disk images are acquired every 10 min, CONtinental United States (CONUS) images are taken every 5 min and mesoscale images are taken every minute. The scan coverage for full disk and CONUS are fixed. The mesoscale scans target high-impact weather, and their locations can change based on operational needs. More details on ABI can be found in [
17].
Multiple ABI scans are processed to derive AMVs using the GOES-R nested tracking algorithm [
18]. Wind vectors in a search box are derived from multiple targets. A cluster analysis algorithm is then applied to select the final motion vector from the largest cluster in the search box [
19]. Ref. [
18] showed that AMVs derived using the above method have a reduced slow speed bias. The ABI spectral bands, spatial resolution and the derived AMV spatial resolution with their naming convention are listed in
Table 1.
To date, two studies have been published demonstrating that the assimilation of GOES-16 AMVs improves tropical cyclone forecasting. The authors of [
20] reported that assimilation of the 15 min AMVs, derived from the GOES-16 rapid scan (mesoscale scan) imagery, have improved the hurricane track and size forecasts for three destructive tropical cyclones. Using Atlantic Hurricane Irma in 2017, [
21] demonstrated that assimilating enhanced vortex-scale GOES-16 AMVs using the 2019 version of the operational HWRF, improved track forecast. Both studies used the enhanced vortex-scale GOES-16 AMVs derived from the technique described in [
22].
In this work, we report on the evaluation of the assimilation the hourly full disk and 15 min CONUS AMVs from GOES-16 and -17 using tropical cyclones from the 2018–2020 hurricane seasons. The paper is organized as follows.
Section 2 provides a summary of the 2020 operational HWRF system.
Section 3 describes the experimental set up, the new quality control procedures and its impact on assimilation statistics.
Section 4 highlights various aspects of forecast improvements from the GOES AMVs. In
Section 4.1, a single assimilation cycle from 2019 Hurricane Dorian is reviewed to understand how the analysis changes with the addition of new AMV types, QC procedures and error profile. Results of the forecast performance for the assimilation of AMVs from GOES-16 and -17 are presented in
Section 4.2,
Section 4.3 and
Section 4.4.
Section 5 gives a summary of the findings.
2. Hurricane Weather Forecasting Model
The HWRF is an atmosphere–ocean-coupled system used both in tropical cyclone research and development as well as operations for the National Hurricane Center (NHC). The HWRF is configured with a parent domain and two storm following nested domains shown in
Figure 1. The parent domain is 77.2° by 77.2° with its center determined by the initial location of the storm and the 72 h forecast. These storm centers are determined by NHC or the Joint Typhoon Warning Center. The two nested domains are 17.8° by 17.8° and 5.9° by 5.9°. Both nested domains are two-way interactive, i.e., there is information exchange between the domains and their parent domain. The three domains have spatial resolutions of 13.5, 4.5 and 1.5 km [
23]. HWRF uses two ghost domains for data assimilation. They have the same spatial resolution as the two nested domains but have larger coverage (d02 is 28° by 28° and d03 is 15° by 15°). The ghost d02 domain sufficiently covers the entire storm, while the ghost d03 domain is used primarily to assimilate aircraft reconnaissance data. The HWRF model has 75 vertical levels with a model top of 10 hPa in all three domains. The initial and boundary conditions used by the HWRF parent domain are provided by the National Centers for Environmental Prediction (NCEP) Global Forecast System (GFS). The suite of physical parameterization used by HWRF are selected for tropical cyclone applications. The parameterizations are the Geophysical Fluid Dynamic Laboratory’s surface-layer parameterization for air–sea interaction, the Noah Land Surface Model [
24,
25], the Rapid Radiative Transfer Model for General circulation models radiation scheme [
26], the Ferrier–Aligo microphysics [
27,
28], the GFS Hybrid Eddy Diffusivity Mass-Flux (Hybrid-ESMF) Planetary Boundary Layer (PBL) scheme [
29], and the scale-aware GFS Simplified Arakawa Schubert (SAS) deep and shallow convection scheme [
28,
30] and the Hybrid Coordinate Ocean Model. More information on HWRF can be found in [
23,
31].
The HWRF Data Assimilation System (HDAS) is a hybrid three-dimensional (3D) ensemble-variational (EnVar) assimilation system [
32] implementation of the Gridpoint Statistical Interpolation (GSI). Data assimilation is performed in the two ghost domains. The use of a static background error covariance matrix, which is isotropic and constrained by larger scale geostrophic balance, limits the spreading of observation information in the presence of a tropical cyclone [
32,
33]. To provide information on the flow-dependent error covariance, a 40-member HWRF forecast-based ensemble is used. The self-cycled system updates each member through an Ensemble Kalman Filter (EnKF) analysis. The HWRF self-cycled ensemble hybrid data assimilation system is triggered for tropical cyclones in the North Atlantic and East Pacific basins that have tail doppler radar data or are defined as a priority storm by NHC. The HWRF ensemble forecasts are initialized from a previous 6-h NCEP Global Data Assimilation System (GDAS) EnKF analysis. The ensemble forecasts are run for the parent domain and a 30° by 30° nest with spatial resolution of 0.033°. Both domains are non-vortex following during the forecast but are recentered to the tropical cyclone center at each analysis time.
To initialize the HWRF state, a multistep procedure was used to optimize modeling the tropical cyclone storm center. The HWRF nested domains are initialized by the GDAS 3 h forecast. The vortex (position, structure, and intensity) in the first guess is modified based on the NHC’s Tropical Cyclone Vitals Database prior to data assimilation. The replaced vortex can either be drawn from a prior HWRF 6 h forecast or the GDAS 3 h forecast. The vortex from the 6 h HWRF forecast is extracted if the observed vortex maximum wind speed is greater or equal to 14 ms
−1. This vortex is corrected based on NHC’s TC Vitals and inserted into the first guess. Otherwise, the corrected vortex from the 3 h GDAS forecast is used. Details on the vortex correction is outlined in [
23]. This vortex-processing step, also known as vortex initialization [
33], is designed to optimize forecast skill [
32,
33]. However, the vortex initialization limits the impact of adding new AMV types by inhibiting the propagation of information from observations assimilated in earlier analysis cycles into the current analysis cycle.
The selection and treatment of the complex suite of weather observations used in the HWRF is likewise optimized to prioritize the modeling of the cyclone. Observation types that are assimilated into HDAS include conventional observations, tail doppler radar data, satellite infrared and microwave radiances, hourly GOES-16 and -17 infrared (IR), Cloud Top Water Vapor (CTWV) and Clear Air Water Vapor (CAWV)-type AMVs and Global Positioning System Radio Occultation bending angle. In [
31], an extensive list of all the observations assimilated in HDAS is provided. The HDAS assimilates observations within ±3 h of the analysis time. To better assimilate the observations, HDAS employs the First Guess-Appropriate Time technique by also using the 3 and 9-h GDAS forecasts. Observations are compared with the first guess at the observation time to obtain the innovation. With the First Guess-Appropriate Time, the two closest background fields are interpolated in time within GSI.
After the data assimilation step, a merging procedure is applied to combine the HDAS analysis with the GDAS analysis to produce the final analysis. The data are interpolated to the parent and nested domains to generate a final analysis used to initialize the HWRF forecast. For tropical cyclones that are hurricane strength (maximum winds greater than 65 kt), the GSI analysis increments are decomposed into respective wavenumber spectra. Only wavenumbers 0 and 1 are kept within a 150 km radius of the tropical cyclone center and relaxed to the full GSI increment 250 km. For weak tropical cyclones (maximum winds less than 64 kt), unaltered data assimilation increments are applied.
The operational HWRF model is run four times daily to produce 126 h forecasts of tropical cyclone track, intensity, structure, and rainfall when a tropical cyclone is identified. The HWRF run is stopped when the tropical cyclone either dissipates after making landfall, becomes extratropical, or degenerates into a remnant low.
Figure 2 shows a schematic of the various processes of a HWRF run during a single analysis–forecast cycle.
The model configuration, run time scripts, and all data files were provided by NCEP, and experiments were conducted in accordance with NCEP’s parallel testing procedures. The 2020 version of the operational HWRF was used. The new hourly and 15 min AMV data files were provided by NESDIS Office of Satellite and Product Operations and are consistent with their operational limits. Experiments were conducted on NOAA’s High-Performance Computing cluster JET. Forecast evaluations were conducted with NCEP’s verification software.
3. Data Assimilation of GOES AMVs
To optimize the use of AMVs in data assimilation, the quality-control procedures and assigned observation error were reviewed for best use within HWRF. In this section, the current quality control metrics are outlined. Modifications for HWRF use are then discussed. A critical adjustment to the observation error handling is presented as well as a change in the gross check. The impact on data usage from the combined adjustments is shown.
The current quality-control (QC) procedures that are used by HWRF for the assimilation of GOES-16 and -17 AMVs in the GSI are similar to GDAS. The AMVs are used if the assigned Quality Indicator (QI) [
34] computed without the forecast component is greater than 80. QI is calculated by estimating the consistency in spatial, direction, speed, and vector. For all AMV types, the observations are used if their normalized Expected Error [
35] (Expected Error/AMV speed) is less than 0.8 ms
−1. For low-level IR type AMVs with pressure values larger than 800 hPa, the normalized Expected Error must be less than 0.55 ms
−1 to be used. AMV observations with pressures less than 950 hPa and below the tropopause are used. All AMV types are subject to a PCT1 check [
18] and near surface and tropopause checks. In the nested tracking algorithm, PCT1 is defined as the standard deviation of the displacements making up the largest motion cluster divided by the average displacements the cluster travelled. It is a measure of how much the initial cloud scene has deformed over the interval of time the cloud is being tracked. AMVs with PCT1 values less than 0.04 and greater than 0.5 are rejected. The infrared (IR)-type AMV observations over land with latitudes greater than 20°N were found to be problematic and are rejected. In addition, IR-type AMVs with pressure values between 400 and 800 hPa and CTWV-type AMVs with pressure values greater than 400 hPa are excluded due to height assignment concerns. The CAWV-type AMVs are also rejected if the difference in the wind direction is greater than 50° from the forecast wind.
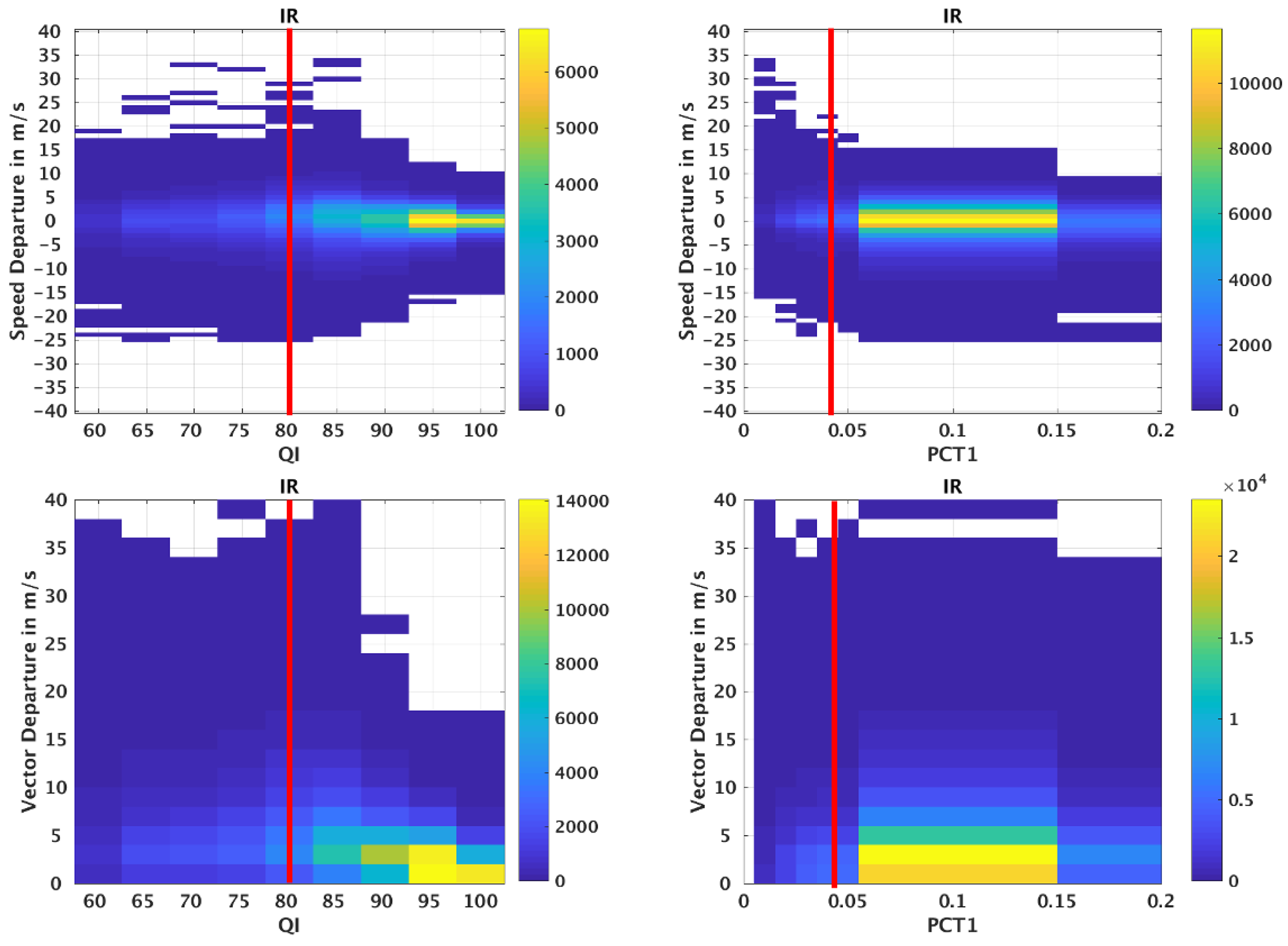
The GOES-R AMVs quality control procedures are reviewed for use in HDAS. HDAS currently employs the global QC procedures derived for synoptic scales, which may not be optimal for mesoscales. Specifically, the QI and PCT1 checks are removed as they reject most of the AMVs available within the HWRF assimilation domains. Density plots of QI and PCT1 for IR AMVs within the assimilation domain for Hurricane Michael are plotted against speed and vector departures (observation minus first guess) in
Figure 3. The current QC cutoffs for these two metrics are shown by the red line. From the density plots, IR AMVs speed and vector departures for QI < 80% and PCT1 < 0.04 are no different to those with QI > 80% and PCT1 < 0.04. The QI metric can have low values if there is a lack of a “buddy” AMV for comparison. However, it does not indicate the observation’s quality. Low PCT1 values are desirable from a tracking standpoint because they imply that the cloud scene is not deforming much over time and is behaving like a passive tracer. Both hourly and 15 min AMVs from GOES-16 and -17 for all AMV types are reviewed, and the same conclusions are drawn to remove the QI and PCT1 checks for AMVs in HWRF (figures not shown). In addition, the nested tracking algorithm produces more IR AMVs between 600–800 hPa. Reducing the blacklisting of low-level IR AMVs from 800 hPa to 600 hPa reflects the improved detection.
While quality control acts as a gatekeeper to limit the used observations to those meeting a quality standard, the assigned observation error plays an important role on the influence of the selected observations. Observational error is used within the variational data assimilation system to determine the magnitude of influence from each observation on the final analysis solution. The GSI setting for this error is adopted from the GDAS. For the GDAS, the error profile is halved for GOES-16 AMV assimilation because the global model uses a larger error profile. When applied to the current HWRF error profile, the values become too small due to the GSI software logic.
Figure 4 shows the current error profile in blue and labelled as H220. The revised error profile is red. The rawinsonde error profile is black. The root-mean-square error (RMSE) derived by the data provider for IR (green), CTWV (orange), and VIS (in magenta) are also shown for comparison. The revised error profile is comparable to the data provider’s RMSE and the error profile used in the assimilation of rawinsondes.
A final AMV test, called the gross check, was also modified for the HWRF GSI configuration. This test is applied to all AMVs to reject observations that have large observation-model departures. The maximum range of departures allowed by the gross check is determined by a gross error parameter multiplied by the observation error profile. Tropical cyclones generally have larger wind speeds. To allow observations that reflect the higher wind speeds, the gross error parameter was relaxed from current values of 1.3–2.5 to 3.5 for all GOES-16 and 17 AMV wind types. Doing so allows observations with wind speed departures of about 17 ms−1 to be assimilated compared to 3 ms−1 with the current settings.
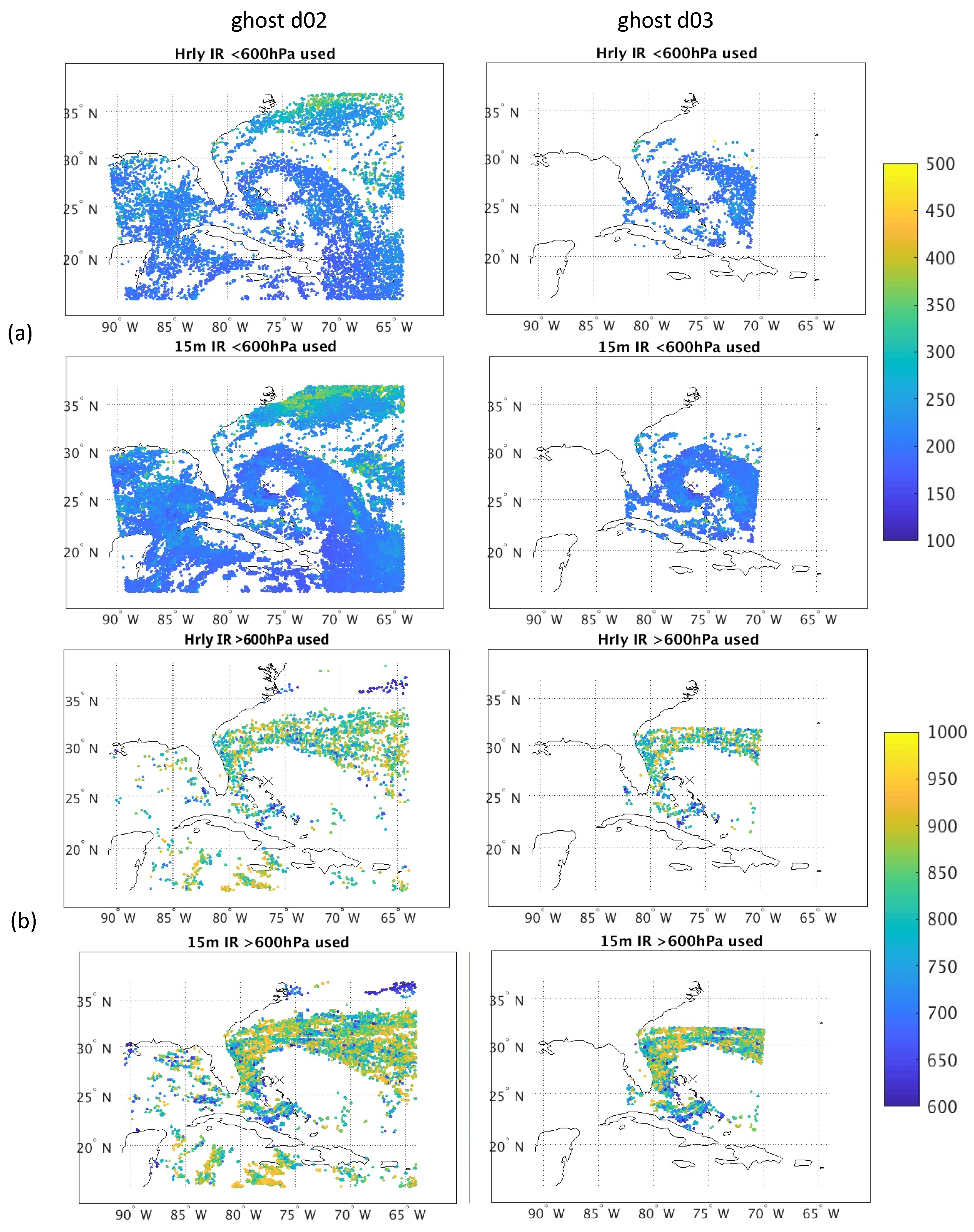
By relaxing the gross check, removing the QI & PCT1 tests, and reducing the vertical range of rejected lower level infrared AMVs, the count of AMV observations is significantly increased for HWRF data assimilation. The percentage of accepted GOES-16 AMVs is shown for Hurricane Michael with and without the recommended changes (
Figure 5). The assimilation counts for GOES-16 hourly AMVs using the current QC, gross check and error profiles are plotted in
Figure 5a. The percentage of observations assimilated is between 40–60%. Together with the use of a larger gross check and the revised error profile, the percentage of observations assimilated increases to 60–95%, as shown in
Figure 5b. The inner core domain (ghost domain d03) shows similar improvements in counts. This evaluation was repeated for the 15 min AMVs when the data stream became available (figures not shown). The new QC changes are still effective for these higher temporal-resolution AMVs.
With the optimization of the GSI software for AMV use in the HWRF data assimilation complete, the evaluation of all AMV types at the hourly and 15 min frequency was completed using tropical cyclone cases during the 2018, 2019, and 2020 seasons. Hourly GOES-16 AMVs are already available in the NCEP Central Operations data stream and hence are available for all these seasons. However, the 2020 version of the operational HWRF/HDAS only assimilates hourly IR, CTWV, and CAWV AMVs. It does not contain the SWIR or VIS AMVs. The operational AMV set will be used in the control (CTRL) and maintains the 2020 operational HWRF quality control procedures and error profile of AMVs during data assimilation. A comparison experiment (AMV1) uses the same AMV set as the CTRL but with the addition of hourly SWIR and VIS AMVs. AMV1 also uses the proposed QC procedures and error profiles outlined above. An additional assimilation experiment, AMV2, was conducted and is identical to AMV1 except for the inclusion of the 15-minute CONUS AMVs for all five types.
Table 2 summarizes the experimental set up used for each experiment.
To assess the impact of QC changes and error profile adjustment, the assimilation statistics of observation—background (O-B) and observation—analysis (O-A) were examined for the control and the two experiments. The mean normalized wind speed departure and the standard deviation of the normalized wind vector departure were assessed and found to be similar or improved when using the QC changes and error profile adjustment in the experiments. As expected, the number of assimilated AMV observations increased for both experiments. Also expected from the experiments was an increase in the standard deviation of the vector wind departure for both the O-B and O-A. These changes are a result assimilating more observations with larger wind speeds, switching to a more appropriate magnitude of observation error and removes the overfitting of the cycled assimilation state to the AMV data. Assimilation statistics are shown for the infrared AMVs for all cycles of Tropical Storm Cristobal in
Figure 6.
More hourly observations are assimilated using the new QC, the updated gross error parameter, and error profiles. The higher frequency 15 min AMVs significantly increases the number of AMVs assimilated, especially at 200 hPa. The mean normalized wind speed difference and standard deviation of normalized wind vector difference increase slightly for the hourly and 15 min AMVs compared to the CTRL. This change is due to an increase in number of observations and inclusion of observations with larger wind speeds. The negative bias observed at 200 hPa agrees with the statistics provided by the data provider. This bias is expected to improve when the Enterprise cloud algorithm (Heidinger, 2016) becomes operational in February 2022 [
36].
Figure 6b show similar assimilation statistics for the case when hourly AMVs are assimilated with VIS and SWIR (AMV1) and when hourly and 15 min AMVs are assimilated (AMV2). Normalized wind speed bias is comparable between both experiments. Standard deviation of normalized vector difference is smaller for AMV2 than AMV1. This result indicates the additional 15 min winds were consistent with the hourly winds and improved the analysis. Statistics for other AMV types are also reviewed (figures not shown) and they share similar findings.
Table 3 lists both the current QC and gross ratio used in HWRF and the proposed changes.
5. Conclusions
The assimilation of hourly and 15 min GOES-16 and -17 AMVs is beneficial for improving tropical cyclone forecasting. This can be attributed to the increased number of observations and more consistent mesoscale quality control procedures. The changes that are made to optimize the assimilation of these AMVs in HWRF are as follows. (1) The observational error profile is adjusted to represent more realistic values and to prevent overfitting to the AMVs. The new errors are comparable to those used by rawinsondes and the RMSE derived by the data provider in their data verification. The values range from 3.7 m/s near the surface to 7 m/s at the middle of the troposphere and above. (2) The range of allowable AMV wind speeds entering the assimilation system is increased to accommodate the larger wind speeds observed in tropical cyclones by relaxing the gross check thresholds. (3) Two data quality checks, QI and PCT1, are removed. Wind speed and vector departures between observations and first guess do not justify that these two checks be used to quality control the AMVs. Removing these checks allow more observations to be assimilated. The above changes are applicable for all the GOES-R AMV wind types and have resulted in a 20–40% increase in the number of AMVs assimilated. One additional change specific to IR AMVs is narrowing the blacklisting region of 400–800 hPa to 400–600 hPa.
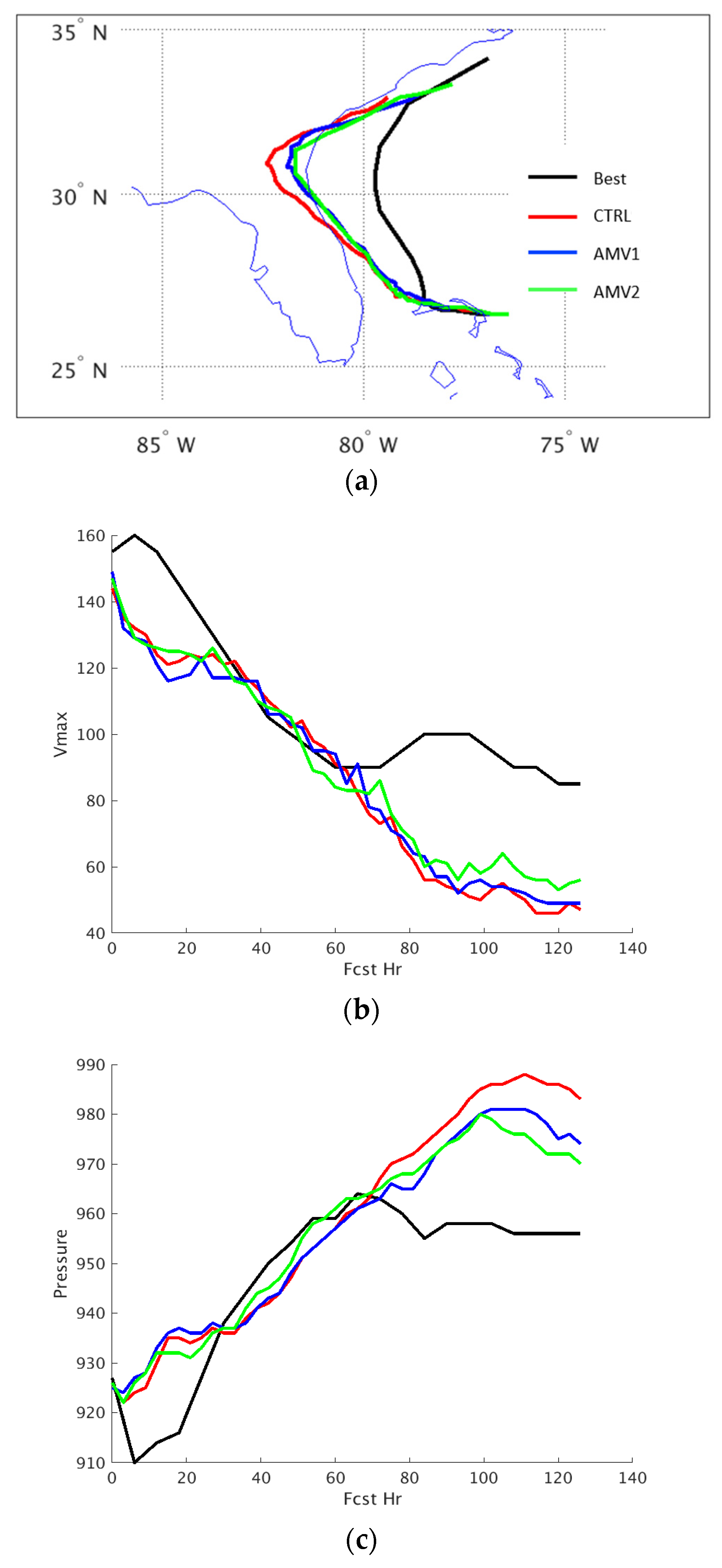
The forecast performance of the GOES-16 hourly AMVs are evaluated mainly using tropical cyclones in the 2018 North Atlantic hurricane season. The forecast impact of the combined GOES-16 hourly and 15 min AMVs are dominated by tropical cyclones in the 2020 North Atlantic hurricane season. Forecasts from both sets of experiment are verified against the NHC best track and compared with the 2020 operational version of HWRF (control). Addition of SWIR and VIS hourly GOES-16 AMVs and the optimized used of all wind types from GOES-16 improved the intensity error and minimum center pressure for most of the forecast hours verified. Impact on track error is from neutral to positive. GOES-16 15 min AMVs forecast impact are evaluated in the presence of the hourly AMVs. Like the hourly AMVs, improvement in track error is achieved for all forecast hours and the first 3 days for intensity error. Positive impact is also achieved up to day 2 for average 50 and 65 kt radius error.
The GOES-17 AMVs are only evaluated for the 2020 Eastern Pacific hurricane season. The forecast impact for GOES-17 AMVs is also compared with a control experiment. Despite the cooling issue of GOES-17 ABI, positive impact is still achieved when these winds are assimilated. The tropical cyclone metrics that are improved are track error, intensity, minimum center pressure, and hurricane force wind radius error.
Other improvements in the generation of AMVs and incorporating time dependencies in the assimilation system are expected to show further improvements in tropical cyclone forecasts. A major source of error for AMVs is the height assignment. The error increases in regions of high wind shear. The soon-to-be-implemented Enterprise cloud algorithm [
38] will also improve data quality as the negative bias observed in AMVs at about 300 hPa is reduced. To fully exploit the temporal information in these AMVs, a data assimilation system that allows for the simultaneous assimilation of asynchronous observations such as the 4DEnVar developed within the HWRF framework [
33] will be critical. The next generation Hurricane Analysis and Forecast System (HAFS), currently under development, has plans to move to a 4DEnVar system.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}