
A Novel Sparse Bayesian Space-Time Adaptive Processing Algorithm to Mitigate Off-Grid Effects

Abstract
:1. Introduction
2. Signal Model
3. Off-Grid Problems
4. The Proposed Algorithm to Mitigate Off-Grid Effects
4.1. Construction of the Dictionary
4.2. Estimation of the Clutter Subspace
4.3. Fast Computation of
4.4. Calculation of the STAP Filter Weight Vector
| Algorithm 1. Pseudocode for the proposed algorithm. |
| Step 1: Input: the data X, . Step 2: Initialize: , , and , . |
| Step 3: While not converged do Obtain all by (28), and exploit (31) to find -th hyper-parameter which needs to be updated in the current iteration. If and , , and . If and , , and replace with . If and , delete from , and delete from . end Update referring to Appendix A. end while Step 4: Estimate the CNCM by (46) Step 5: Compute the space-time adaptive weight using (47). Step 6: The output of the space-time filter is . |
5. Analysis of Complexity, Storage and Convergence
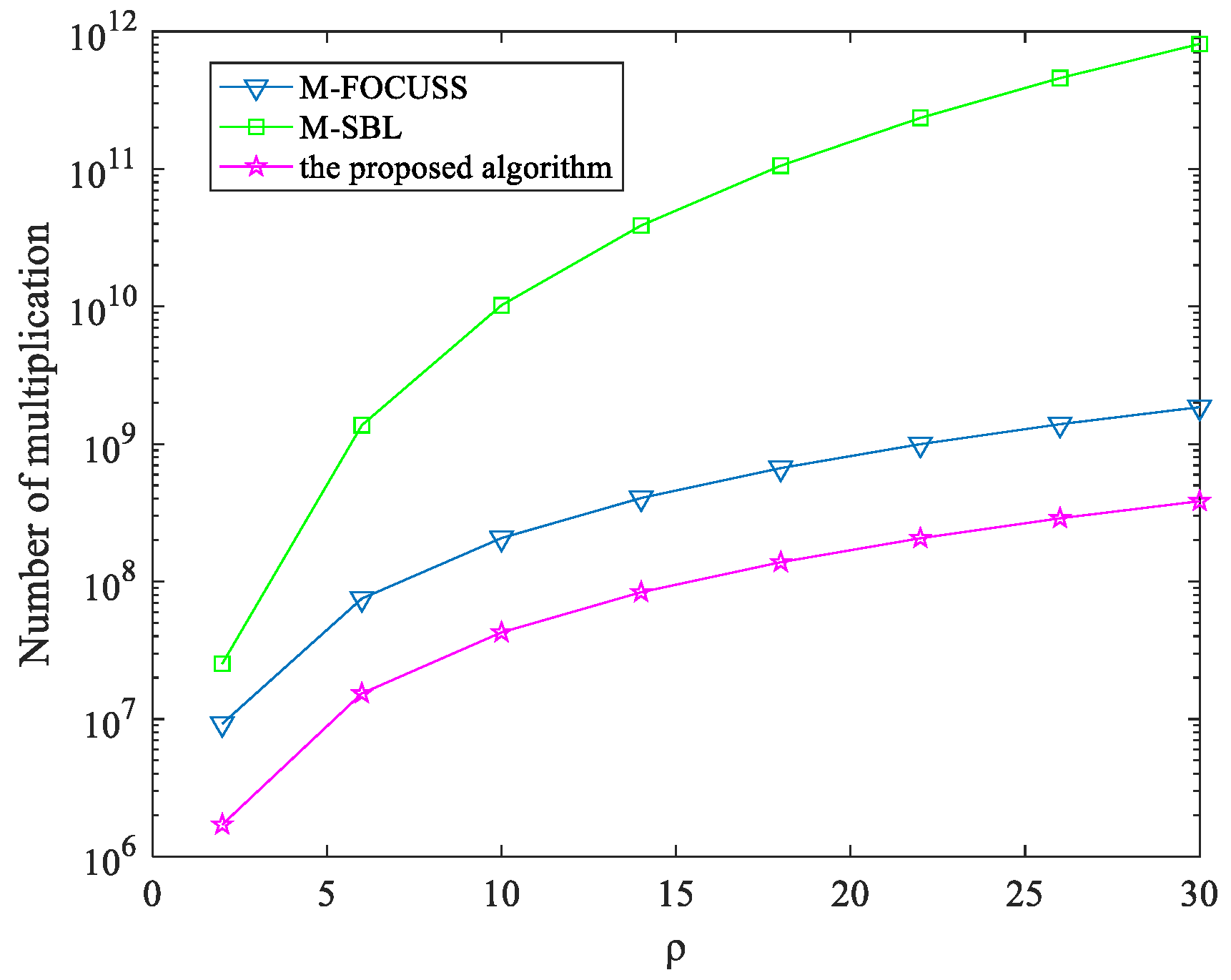
5.1. Complexity Analysis
5.2. Storage Analysis
5.3. Convergence Analysis
6. Performance Assessment
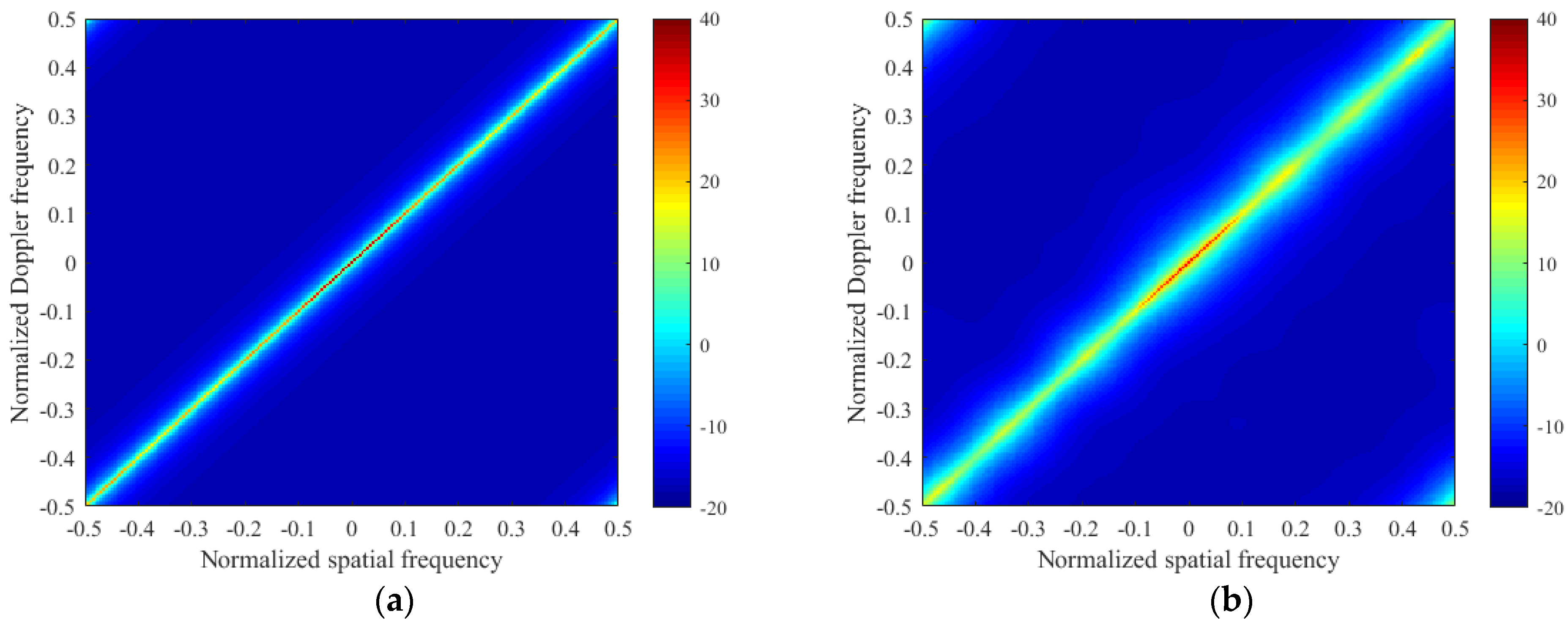
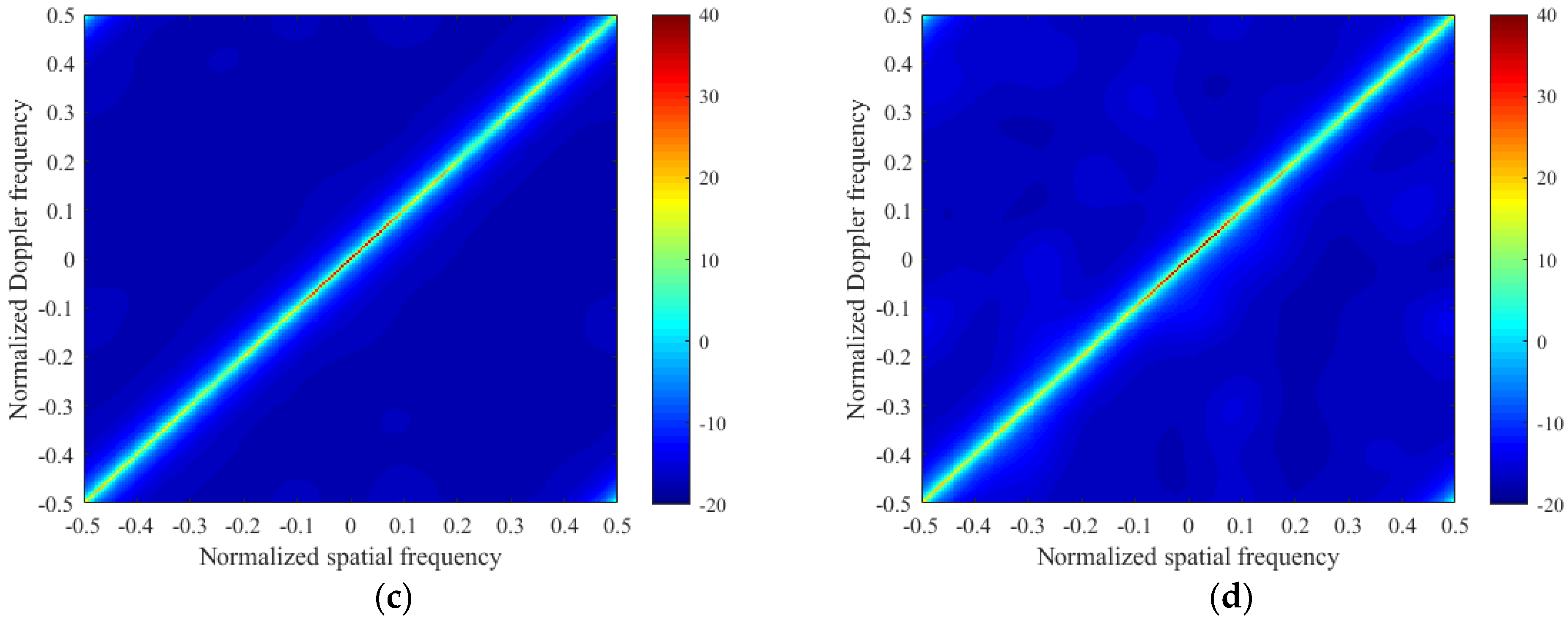
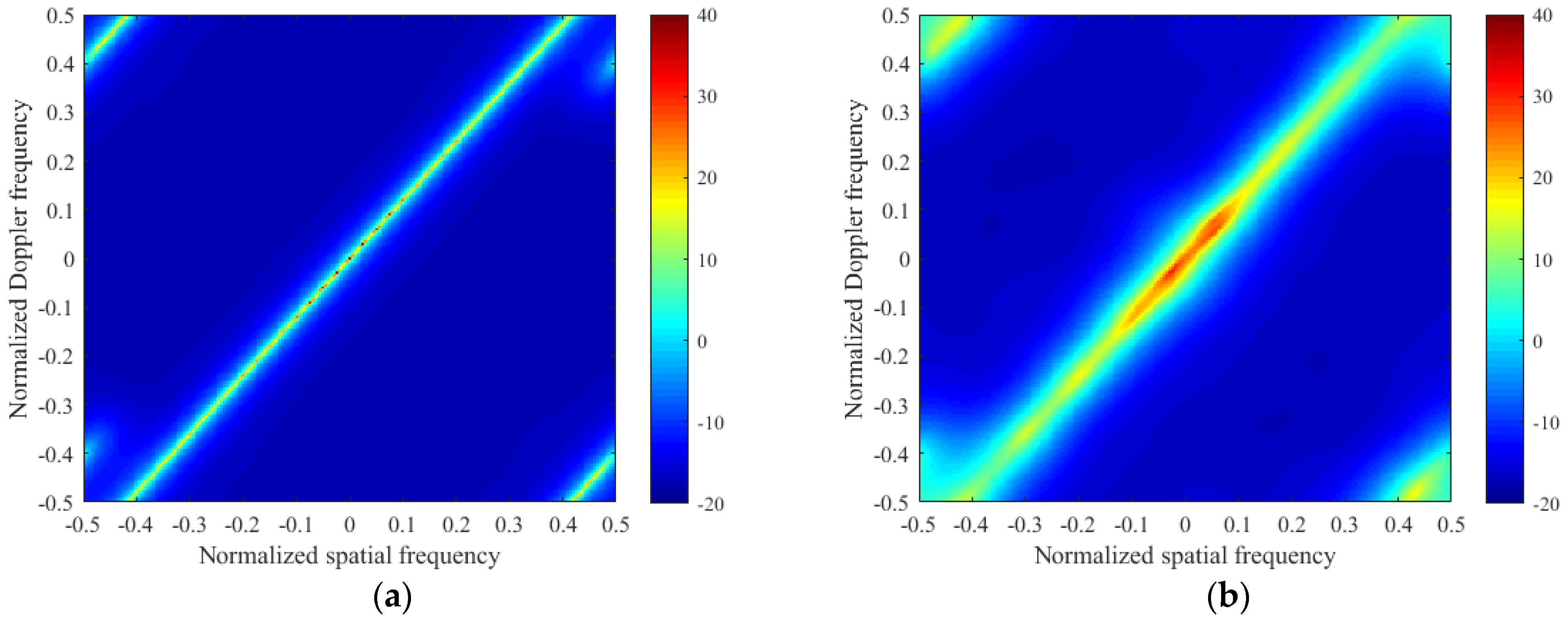
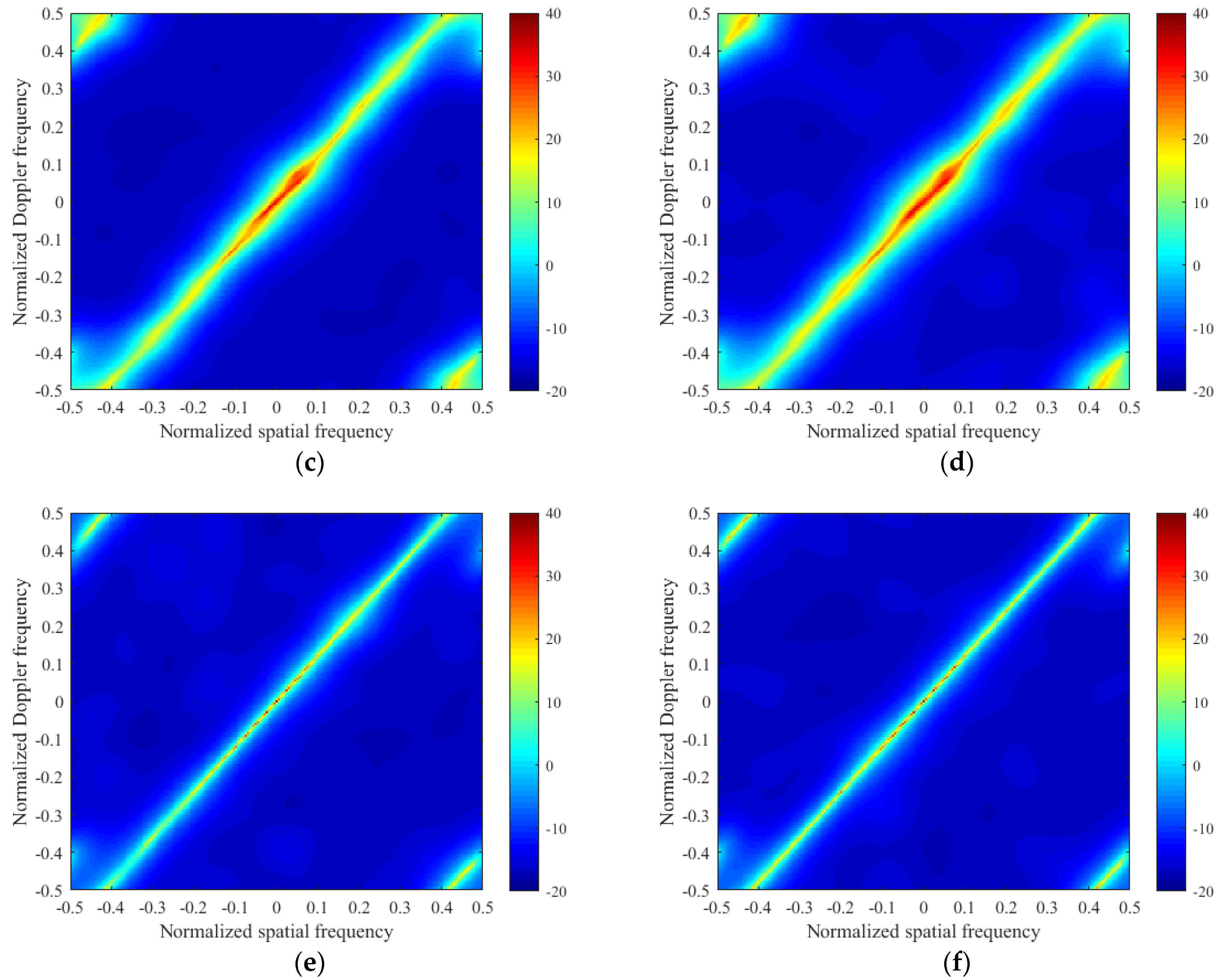
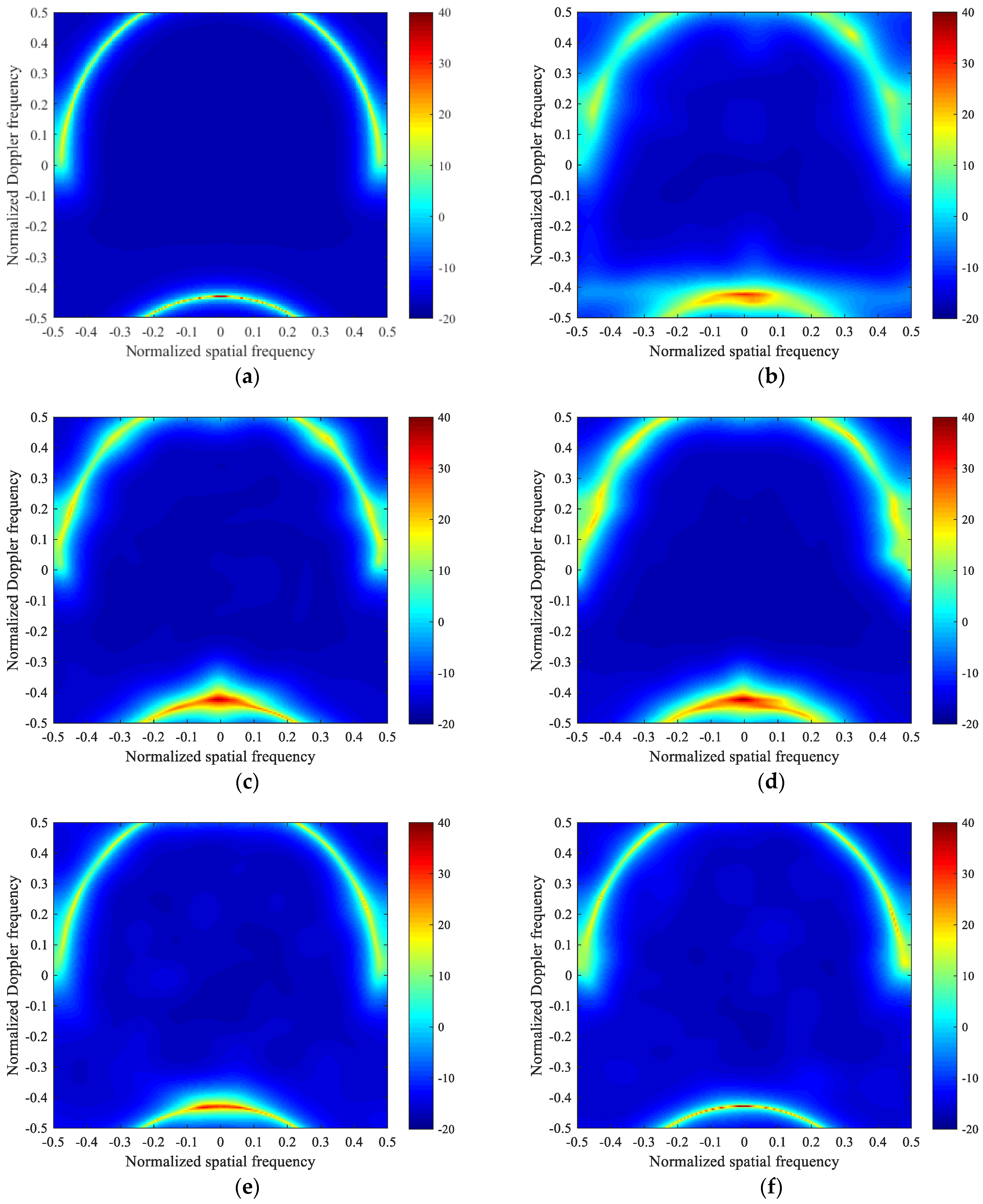
6.1. Comparison of Clutter Spectrums Estimated by SR-STAP Algorithms
- (i)
- A side-looking radar without off-grid problems
- (ii)
- A side-looking radar with off-grid problems
- (iii)
- A forward-looking radar.
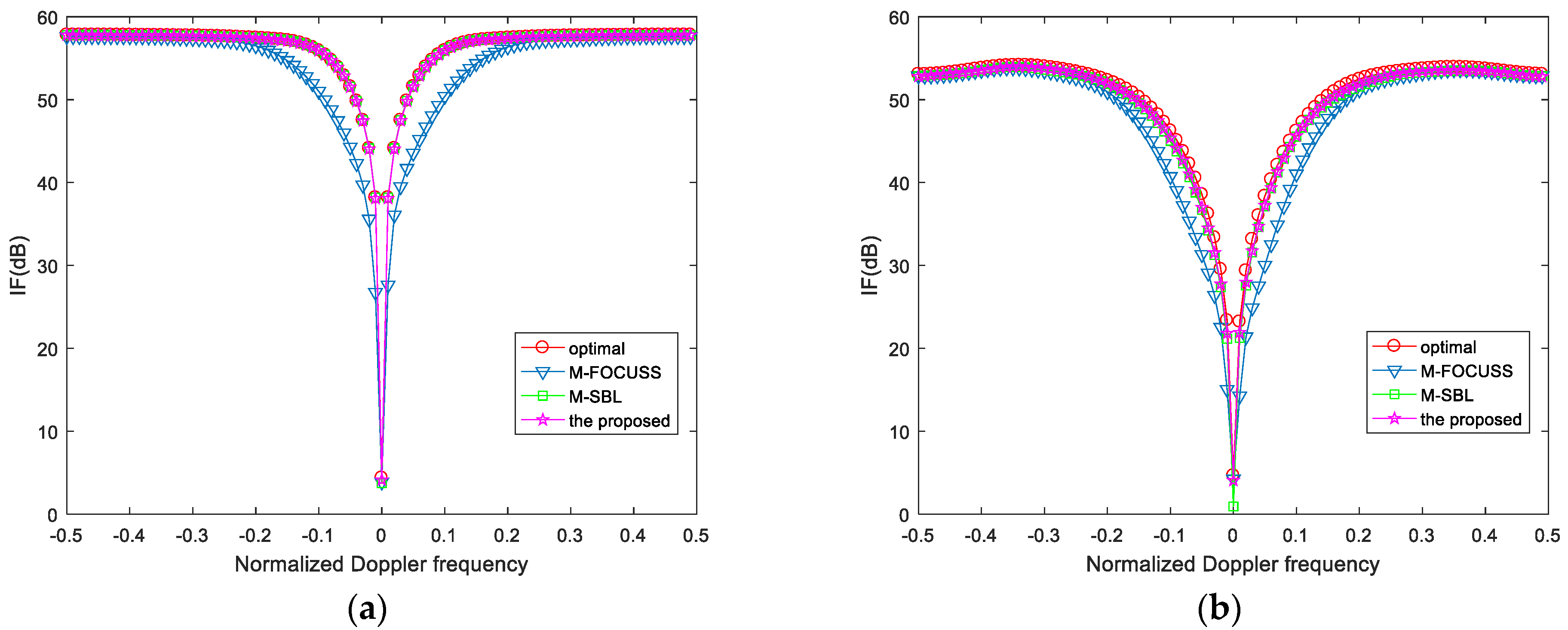
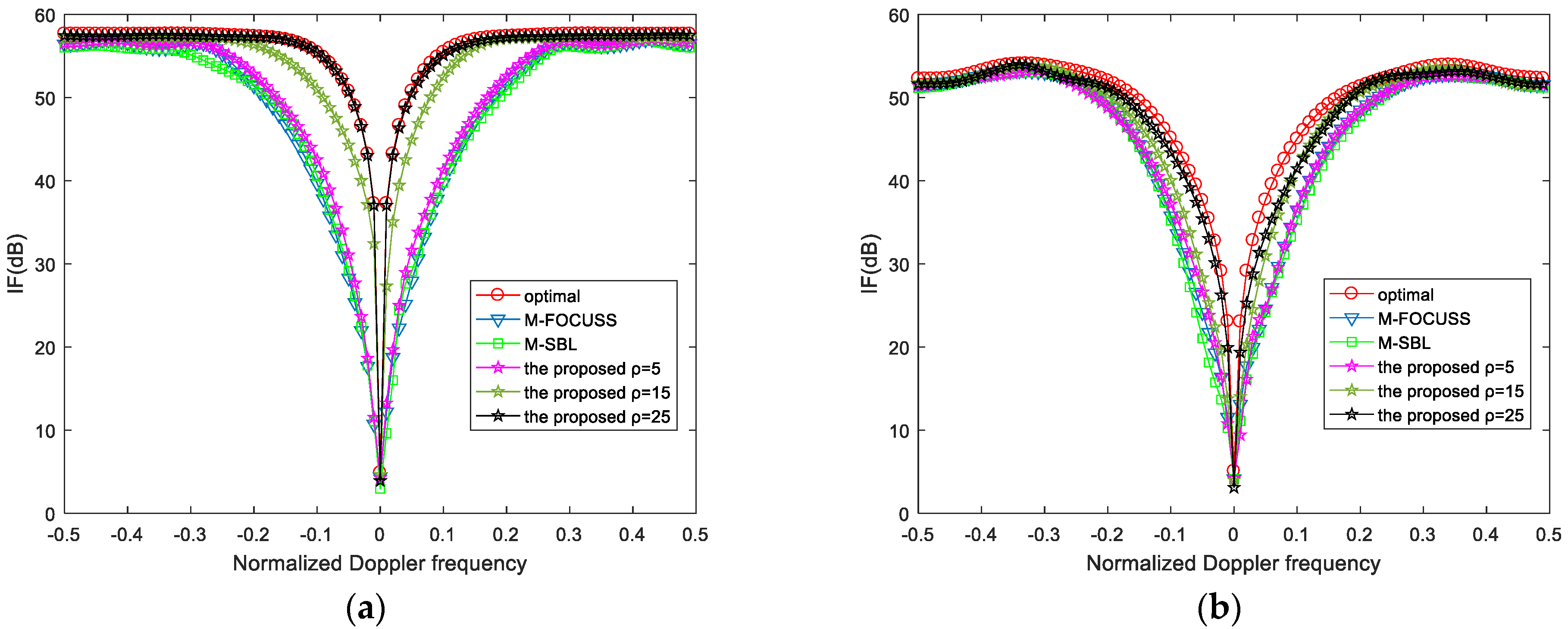
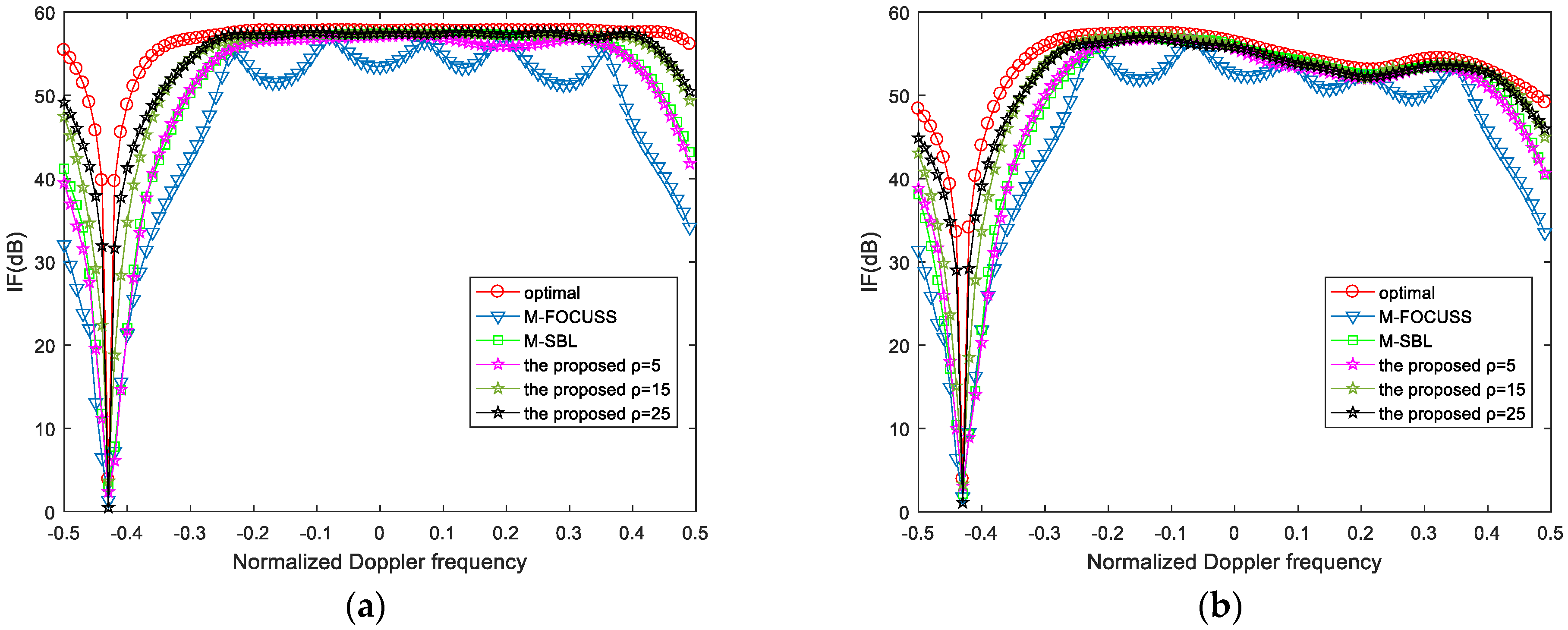
6.2. Comparison of IF Curves with SR-STAP Algorithms
- (i)
- A side-looking radar without off-grid problems
- (ii)
- A side-looking radar with off-grid problems
- (iii)
- A forward-looking radar
6.3. Comparison of Running Time with SR-STAP Algorithms
- (i)
- A side-looking radar without off-grid problems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | The Average Running Time (s) |
|---|---|
| M-FOCUSS | 1.05 |
| M-SBL | 26.32 |
| the proposed algorithm | 0.88 |
- (ii)
- A side-looking radar with off-grid problems
| Algorithm | The Average Running Time (s) | ||
|---|---|---|---|
| M-FOCUSS | 1.13 | 72.23 | |
| M-SBL | 29.79 | ||
| the proposed algorithm | 1.06 | 3.36 | 12.14 |
- (iii)
- A forward-looking radar
| Algorithm | The Average Running Time (s) | ||
|---|---|---|---|
| M-FOCUSS | 1.02 | 64.14 | |
| M-SBL | 30.62 | ||
| the proposed algorithm | 1.05 | 4.03 | 12.94 |
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- When ,where and .
- When ,where , and .
- When ,
References
- Ward, J. Space-Time Adaptive Processing for Airborne Radar; Technical Report; MIT Lincoln Laboratory: Lexington, KY, USA, 1998. [Google Scholar]
- Reed, I.S.; Mallet, J.D.; Brennan, L.E. Rapid convergence rate in adaptive arrays. IEEE Trans. Aerosp. Electron. Syst. 1974, 10, 853–863. [Google Scholar] [CrossRef]
- Donoho, D.L.; Elad, M.; Temlyakov, V.N. Stable recovery of sparse overcomplete representations in the presence of noise. IEEE Trans. Inf. Theory 2006, 52, 6–18. [Google Scholar] [CrossRef]
- Sun, K.; Zhang, H.; Li, G.; Meng, H.D.; Wang, X.Q. A novel STAP algorithm using sparse recovery technique. IEEE Int. Geosci. Remote Sens. Symp. 2009, 1, 3761–3764. [Google Scholar]
- Yang, Z.C.; Li, X.; Wang, H.Q.; Jiang, W.D. On clutter sparsity analysis in space-time adaptive processing airborne radar. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1214–1218. [Google Scholar] [CrossRef]
- Sen, S. Low-rank matrix decomposition and spatial-temporal sparse recovery for STAP radar. IEEE J. Sel. Top. Signal Process. 2015, 9, 1510–1523. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, Z.; Liu, W.; de Lamare, R.C. Reduced-dimension space-time adaptive processing with sparse constraints on beam-Doppler selection. Signal Process. 2019, 157, 78–87. [Google Scholar] [CrossRef]
- Zhang, W.; An, R.; He, N.; He, Z.; Li, H. Reduced dimension STAP based on sparse recovery in heterogeneous clutter environments. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 785–795. [Google Scholar] [CrossRef]
- Liu, C.; Wang, T.; Zhang, S.G.; Ren, B. Clutter suppression based on iterative reweighted methods with multiple measurement vectors for airborne radar. IET Radar Sonar Navig. 2022, 16, 1–14. [Google Scholar] [CrossRef]
- Candes, M.; Wakin, M.; Boyd, S. Enhancing sparsity by reweighted minimization. J. Fourier Anal. Appl. 2008, 5, 877–905. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. 2001, 1, 211–244. [Google Scholar]
- Wipf, D.P.; Rao, B.D. Sparse Bayesian learning for basis selection. IEEE Trans. Signal Process. 2004, 52, 2153–2164. [Google Scholar] [CrossRef]
- Wipf, D.P.; Rao, B.D. An empirical Bayesian strategy for solving the simultaneous sparse approximation problem. IEEE Trans. Signal Process. 2007, 55, 3704–3716. [Google Scholar] [CrossRef]
- Tipping, M.E.; Faul, A.C. Fast marginal likelihood maximization for sparse Bayesian models. In Proceedings of the Ninth International Workshop on Artificial Intelligence and Statistics, Key West, FL, USA, 3–6 January 2003; Volume 1, pp. 276–283. [Google Scholar]
- Ji, S.H.; Xue, Y.; Carin, L. Bayesian compressive sensing. IEEE Trans. Signal Process. 2008, 56, 2346–2356. [Google Scholar] [CrossRef]
- Ji, S.H.; Dunson, D.; Carin, L. Multi-task compressive sensing. IEEE Trans. Signal Process. 2009, 57, 92–106. [Google Scholar] [CrossRef]
- Babacan, S.D.; Molina, R.; Katsaggelos, A.K. Bayesian compressive sensing using Laplace priors. IEEE Trans. Image Process. 2010, 19, 53–63. [Google Scholar] [CrossRef]
- Wu, Q.S.; Zhang, Y.M.; Amin, M.G.; Himed, B. Complex multitask Bayesian compressive sensing. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014. [Google Scholar]
- Serra, J.G.; Testa, M.; Katsaggelos, A.K. Bayesian K-SVD using fast variational inference. IEEE Trans. Image Process. 2017, 26, 3344–3359. [Google Scholar] [CrossRef]
- Ma, Z.Q.; Dai, W.; Liu, Y.M.; Wang, X.Q. Group sparse Bayesian learning via exact and fast marginal likelihood maximization. IEEE Trans. Signal Process. 2017, 65, 2741–2753. [Google Scholar] [CrossRef]
- Liu, C.; Wang, T.; Zhang, S.G.; Ren, B. A fast space-time adaptive processing algorithm based on sparse Bayesian learning for airborne radar. Sensors 2022, 22, 2664. [Google Scholar] [CrossRef]
- Duan, K.Q.; Wang, Z.T.; Xie, W.C.; Chen, H.; Wang, Y.L. Sparsity-based STAP algorithm with multiple measurement vectors via sparse Bayesian learning strategy for airborne radar. IET Signal Process. 2017, 11, 544–553. [Google Scholar] [CrossRef]
- Wang, Z.T.; Xie, W.C.; Duan, K.Q. Clutter suppression algorithm base on fast converging sparse Bayesian learning for airborne radar. Signal Process. 2017, 130, 159–168. [Google Scholar] [CrossRef]
- Yang, X.P.; Sun, Y.Z.; Yang, J.; Long, T.; Sarkar, T.K. Discrete Interference suppression method based on robust sparse Bayesian learning for STAP. IEEE Access 2019, 10, 26740–26751. [Google Scholar] [CrossRef]
- Duan, K.Q.; Liu, W.J.; Duan, G.Q.; Wang, Y.L. Off-grid effects mitigation exploiting knowledge of the clutter ridge for sparse recovery STAP. IET Radar Sonar Navig. 2018, 12, 557–564. [Google Scholar] [CrossRef]
- You, K.T.; Guo, W.B.; Liu, Y.L.; Wang, W.B.; Sun, Z. Grid evolution: Joint dictionary learning and sparse Bayesian recovery for multiple off-grid targets localization. IEEE Commun. Lett. 2018, 22, 2068–2071. [Google Scholar] [CrossRef]
- Dai, J.S.; Bao, X.; Xu, W.C.; Chang, C.Q. Root sparse Bayesian learning for off-grid DOA estimation. IEEE Signal Process. Lett. 2017, 24, 46–50. [Google Scholar] [CrossRef]
- Fang, J.; Wang, F.Y.; Shen, Y.N.; Li, H.B.; Blum, R.S. Super-resolution compressed sensing for line spectral estimation: An iterative reweighted approach. IEEE Trans. Signal Process. 2016, 64, 4649–4662. [Google Scholar] [CrossRef]
- Fang, J.; Shen, Y.N.; Li, H.B.; Li, S.Q. Super-resolution compressed sensing: An iterative reweighted algorithm for joint parameter learning and sparse signal recovery. IEEE Signal Process. Lett. 2014, 21, 761–766. [Google Scholar]
- Li, Z.H.; Zhang, Y.S.; He, X.Y.; Guo, Y.D. Low-complexity off-grid STAP algorithm based on local search clutter subspace estimation. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1862–1865. [Google Scholar] [CrossRef]
- Yuan, H.D.; Xu, H.; Duan, K.Q.; Xie, W.C.; Liu, W.J.; Wang, Y.L. Sparse Bayesian learning-based space-time adaptive processing with off-grid self-calibration for airborne radar. IEEE Access 2018, 6, 47296–47307. [Google Scholar] [CrossRef]
- Wipf, D.; Nagarajan, S. A new view of automatic relevance determination. In Advances in Neural Information Processing Systems 20; MIT Press: New York, NY, USA, 2008. [Google Scholar]









| Algorithm | Computational Complexity |
|---|---|
| M-FOCUSS | |
| M-SBL | |
| the proposed algorithm |
| Parameters | Symbols | Value |
|---|---|---|
| Distance between elements | 0.15 m | |
| Wavelength | 0.3 m | |
| Platform height | 9000 m | |
| Number of pulses | 8 | |
| Number of channels | 8 | |
| Pulse repetition frequency | 2000 Hz | |
| Range sampling frequency | 2.5 MHz | |
| Clutter to noise ratio | 40 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Wang, T.; Liu, K.; Zhang, X. A Novel Sparse Bayesian Space-Time Adaptive Processing Algorithm to Mitigate Off-Grid Effects. Remote Sens. 2022, 14, 3906. https://doi.org/10.3390/rs14163906
Liu C, Wang T, Liu K, Zhang X. A Novel Sparse Bayesian Space-Time Adaptive Processing Algorithm to Mitigate Off-Grid Effects. Remote Sensing. 2022; 14(16):3906. https://doi.org/10.3390/rs14163906
Chicago/Turabian StyleLiu, Cheng, Tong Wang, Kun Liu, and Xinying Zhang. 2022. "A Novel Sparse Bayesian Space-Time Adaptive Processing Algorithm to Mitigate Off-Grid Effects" Remote Sensing 14, no. 16: 3906. https://doi.org/10.3390/rs14163906
APA StyleLiu, C., Wang, T., Liu, K., & Zhang, X. (2022). A Novel Sparse Bayesian Space-Time Adaptive Processing Algorithm to Mitigate Off-Grid Effects. Remote Sensing, 14(16), 3906. https://doi.org/10.3390/rs14163906