
PBL Height Retrievals at a Coastal Site Using Multi-Instrument Profiling Methods

 , ,
, ,  ,
,  , ,
, ,  ,
,  ,
, 
Abstract
:
1. Introduction
2. Instrumentation, Data, and Methodology
2.1. Instrumentation
2.2. Data
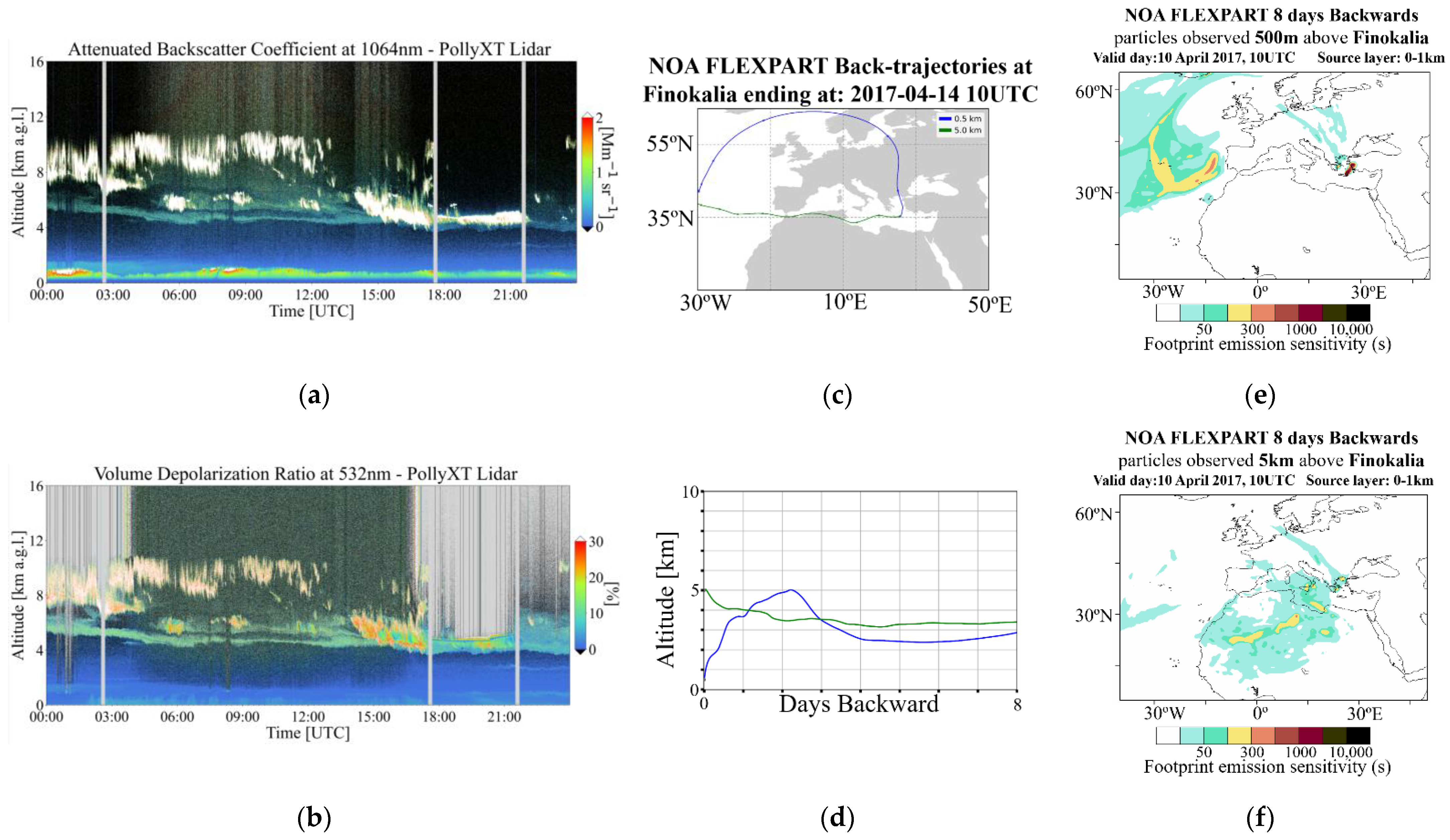
- (a)
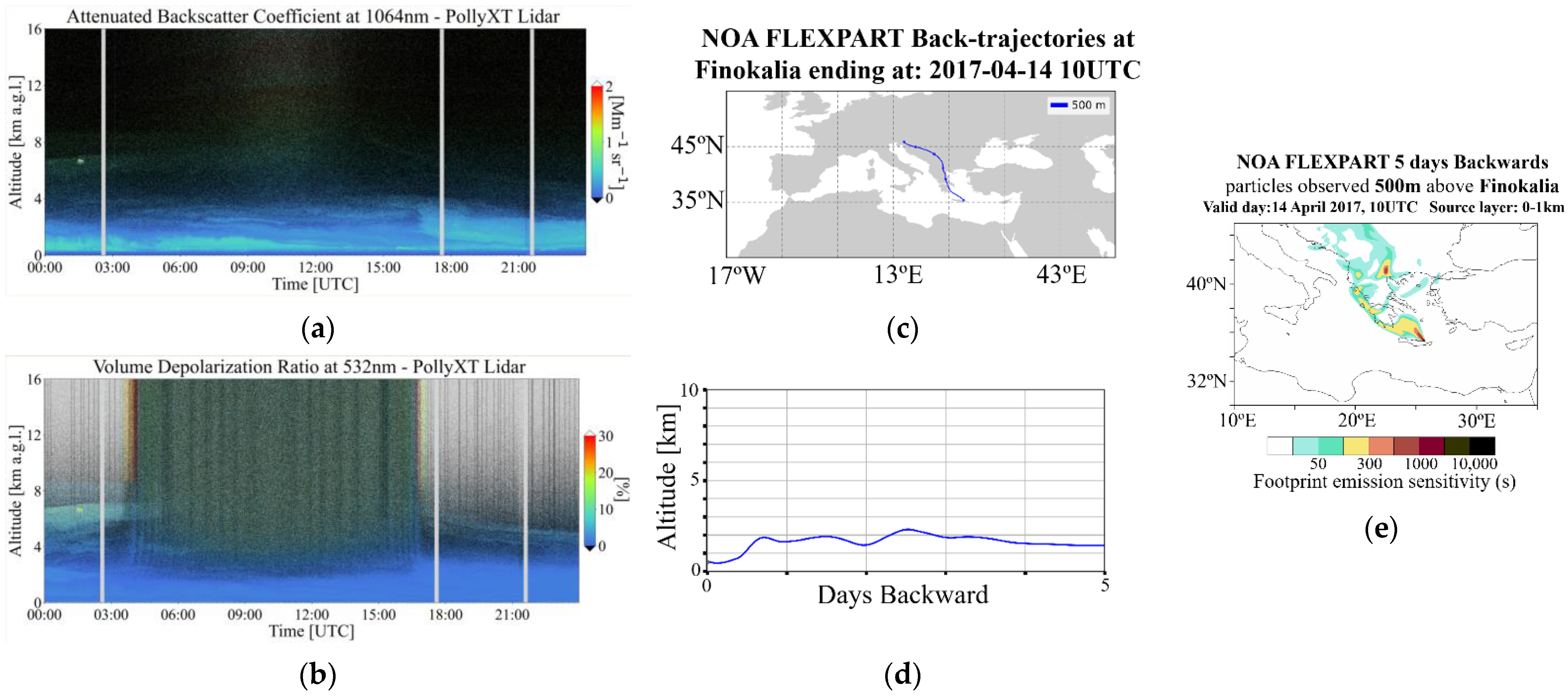
- 8-day air masses back-trajectories prior to their arrival at 2 altitudes (0.5 and 5 km) above Finokalia ground station on 10 April 2017 at 10:00 UTC and
- (b)
- 5-day air masses back-trajectories at 500 m above Finokalia ground station on 14 April 2017 at 10:00 UTC.
2.3. Methodology
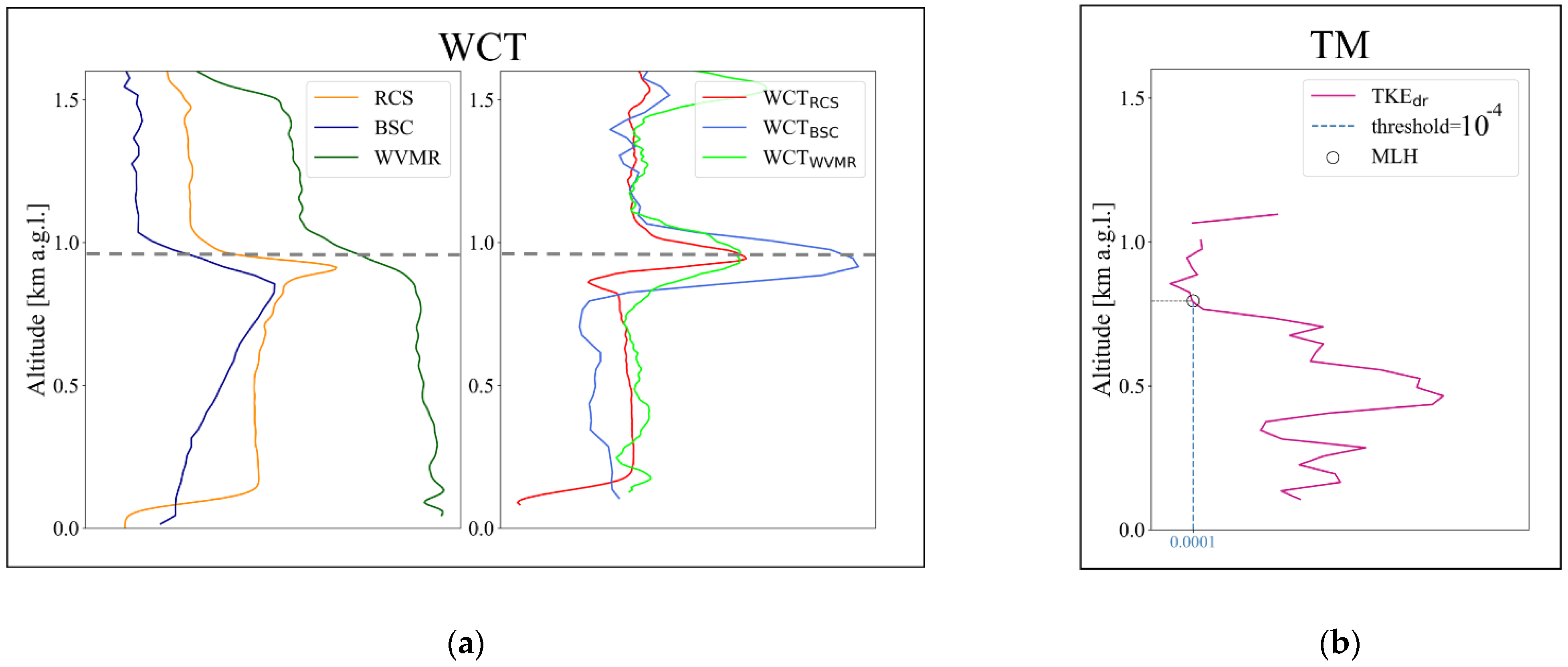
2.3.1. Wavelet Covariance Transform (WCT)
2.3.2. Threshold Method
2.3.3. Comparison between WCT and TM Applied Methods
3. Results
3.1. Case 10 April 2017
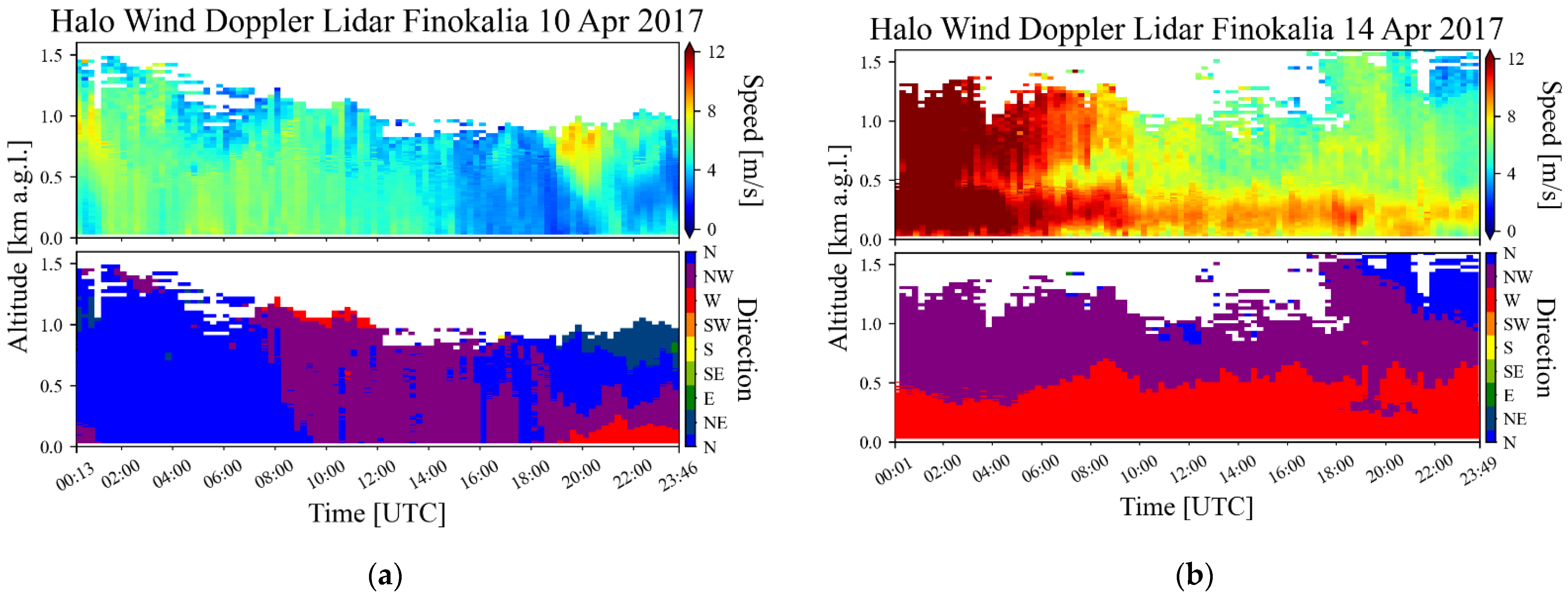
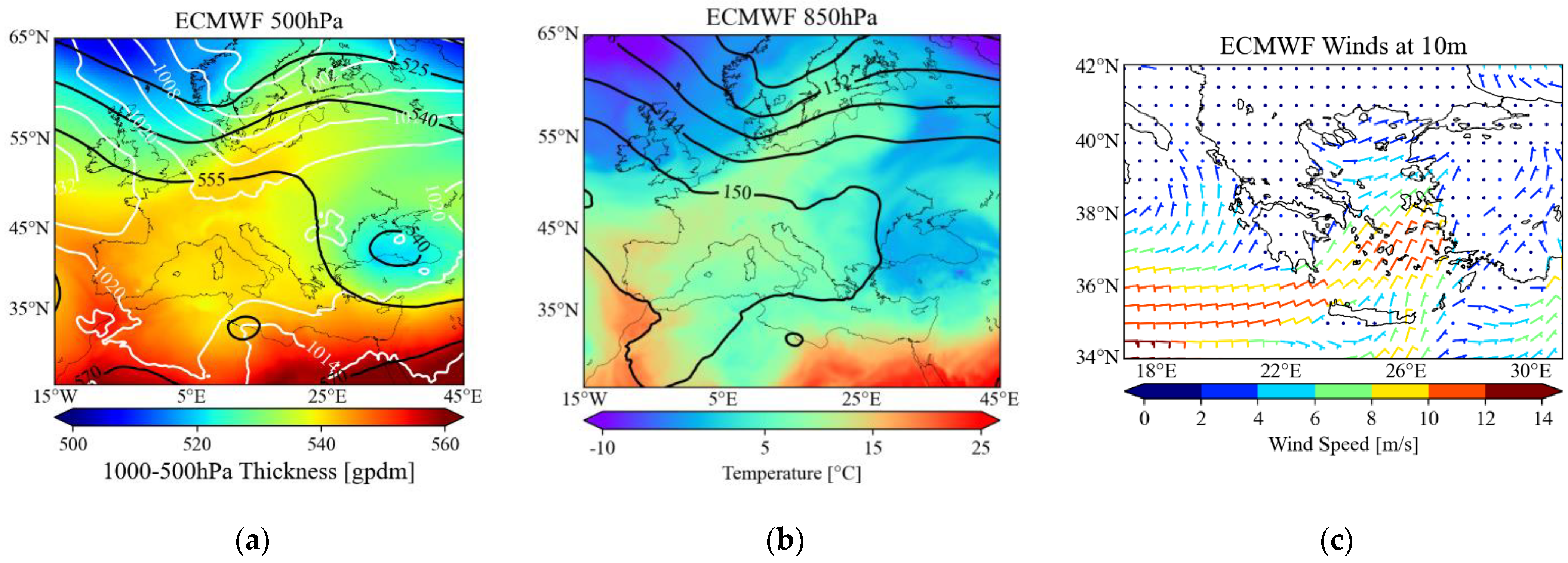
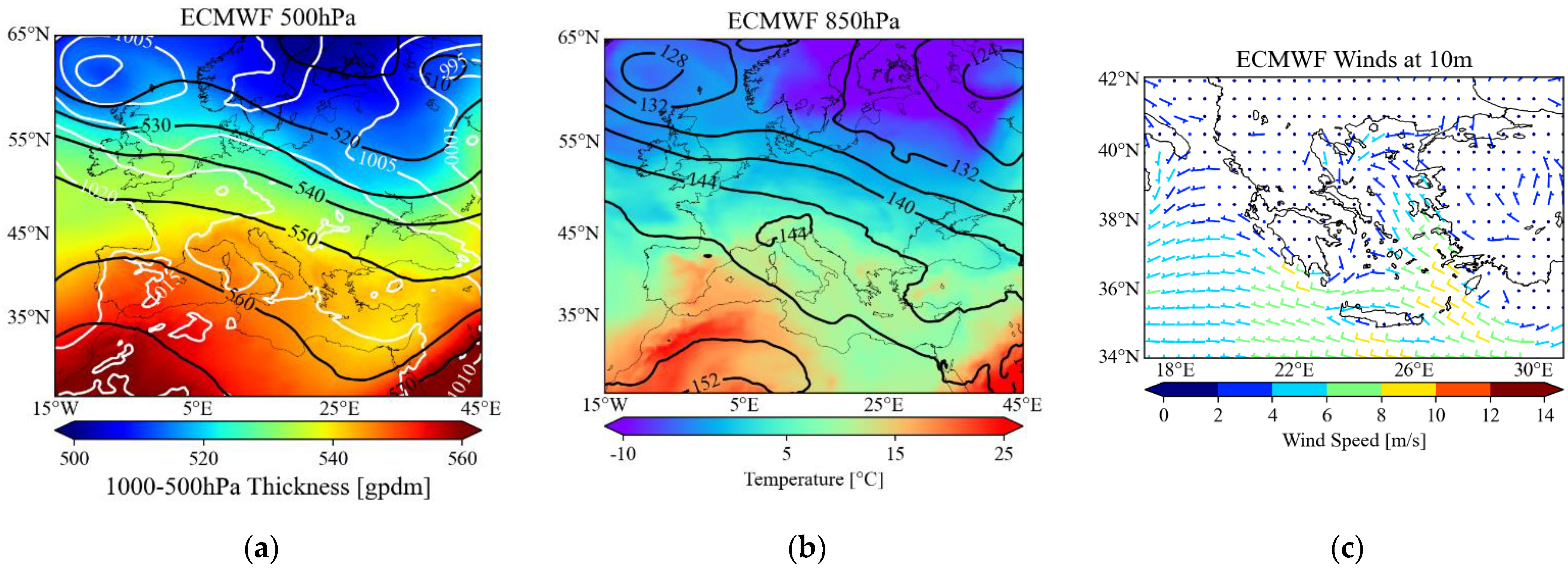
3.1.1. Meteorological Analysis
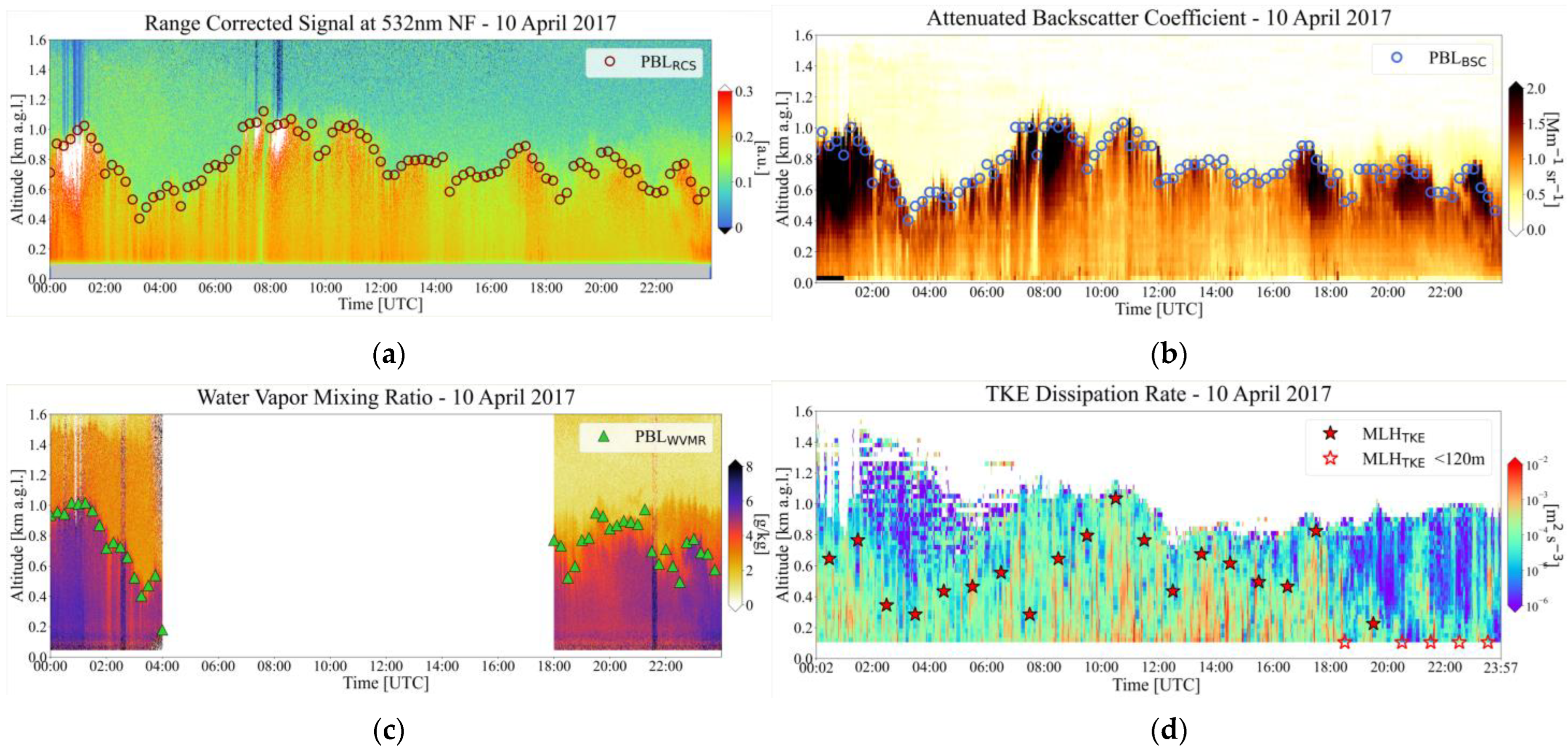
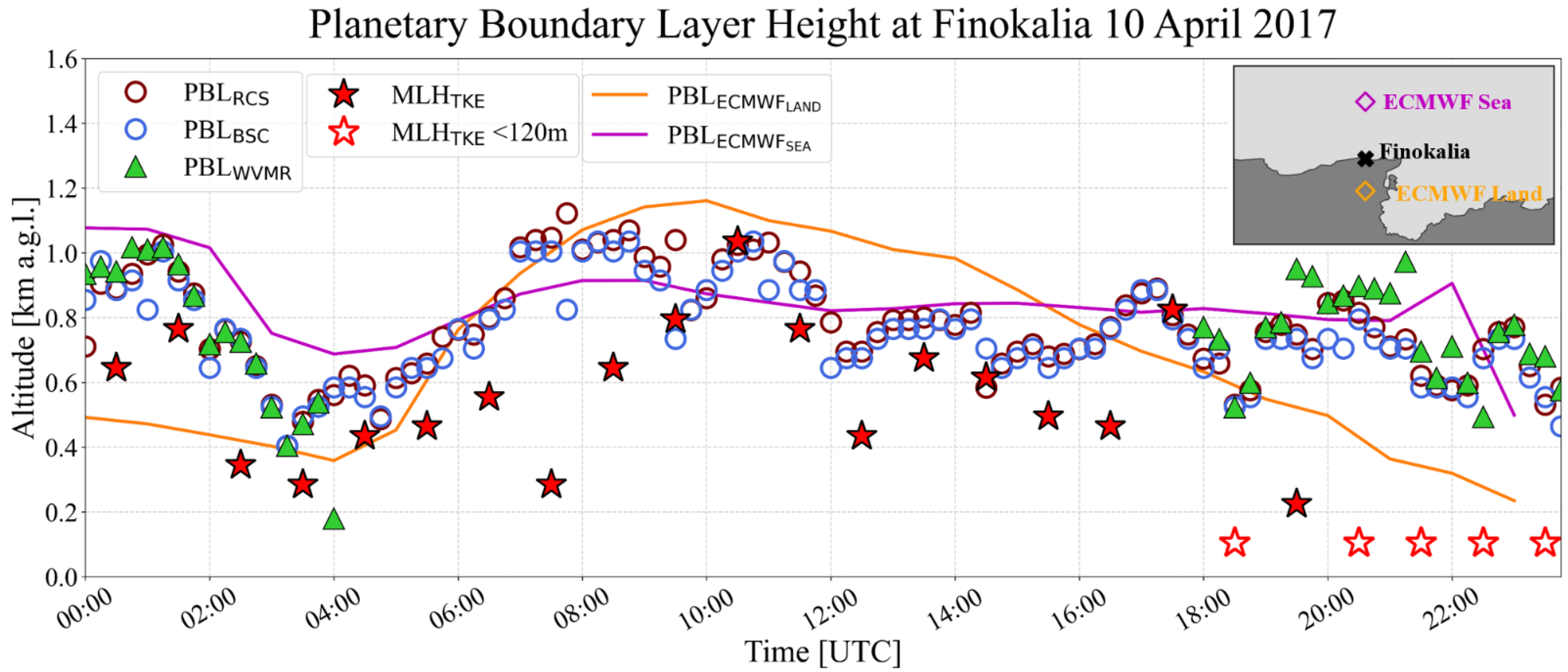
3.1.2. PBL Diurnal Evolution on 10 April 2017
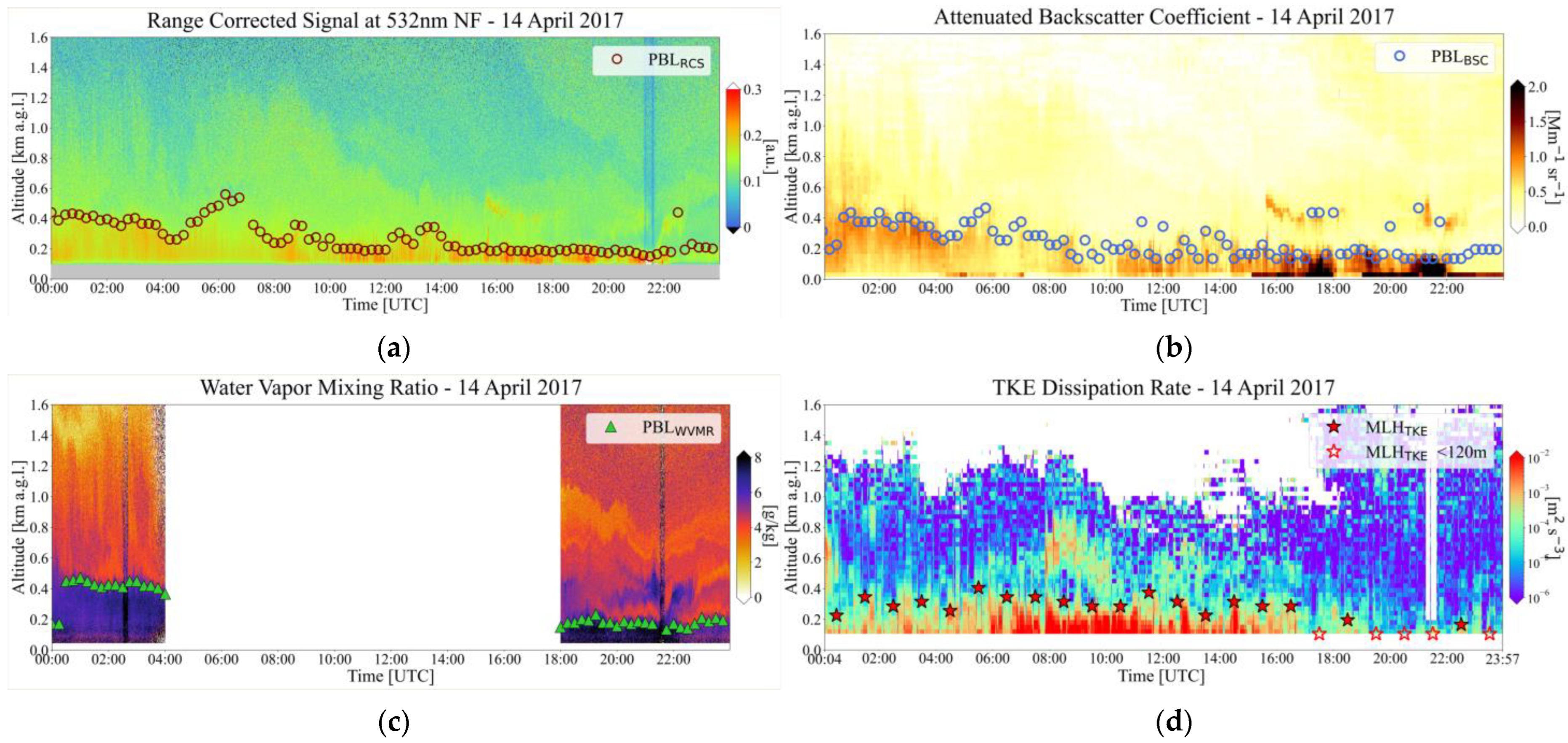
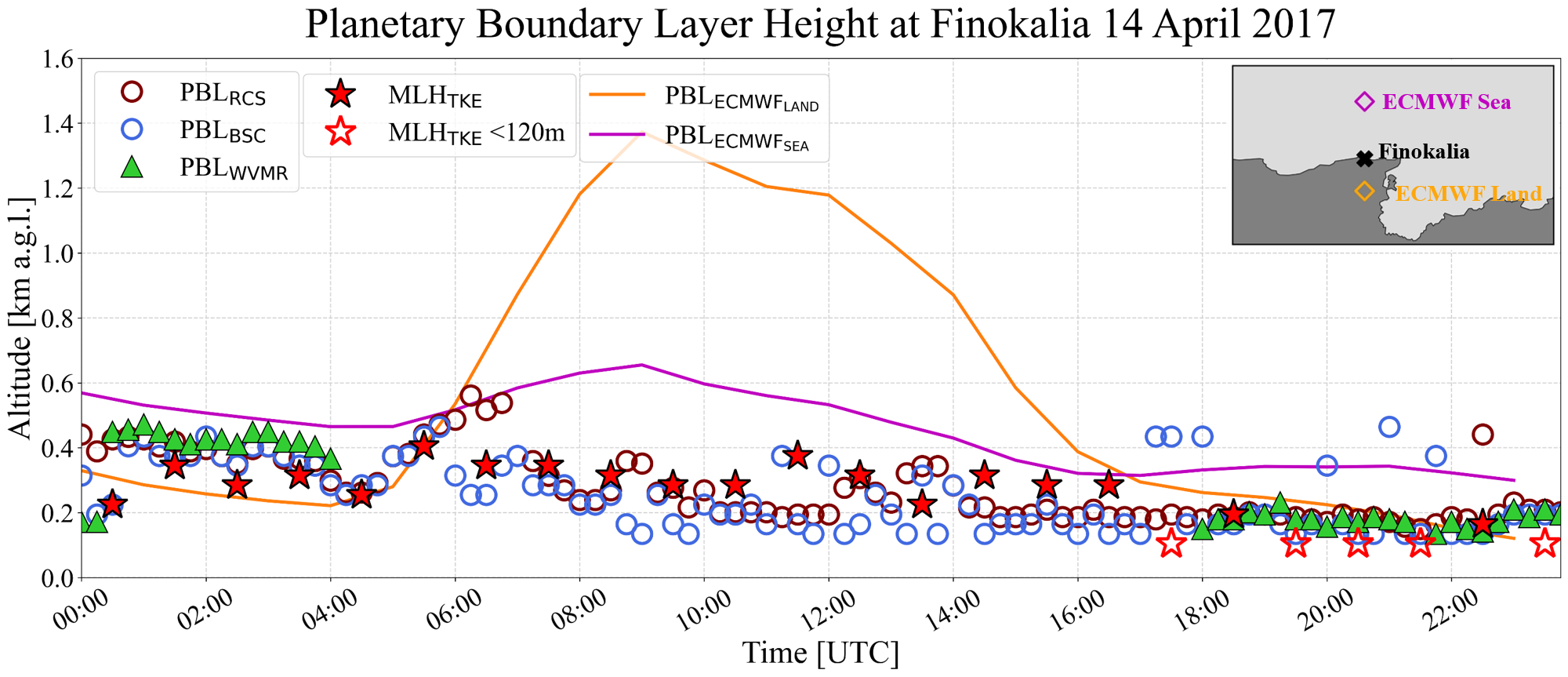
3.2. Case 14 April 2017
3.2.1. Meteorological Analysis
3.2.2. PBL Diurnal Evolution on 14 April 2017
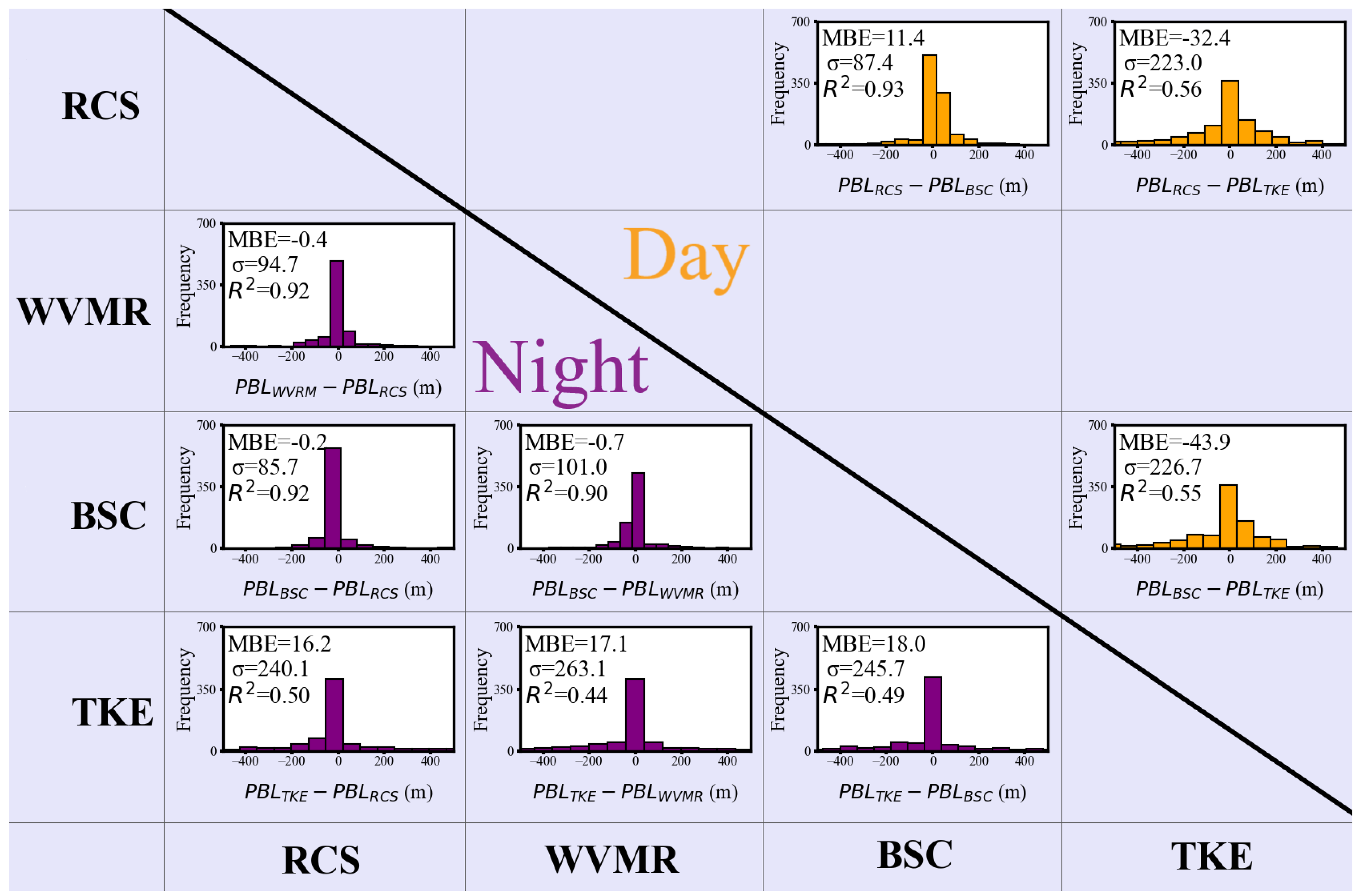
3.3. Statistical Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
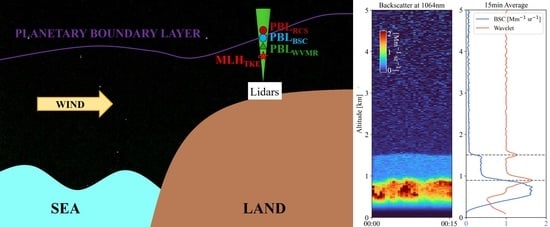
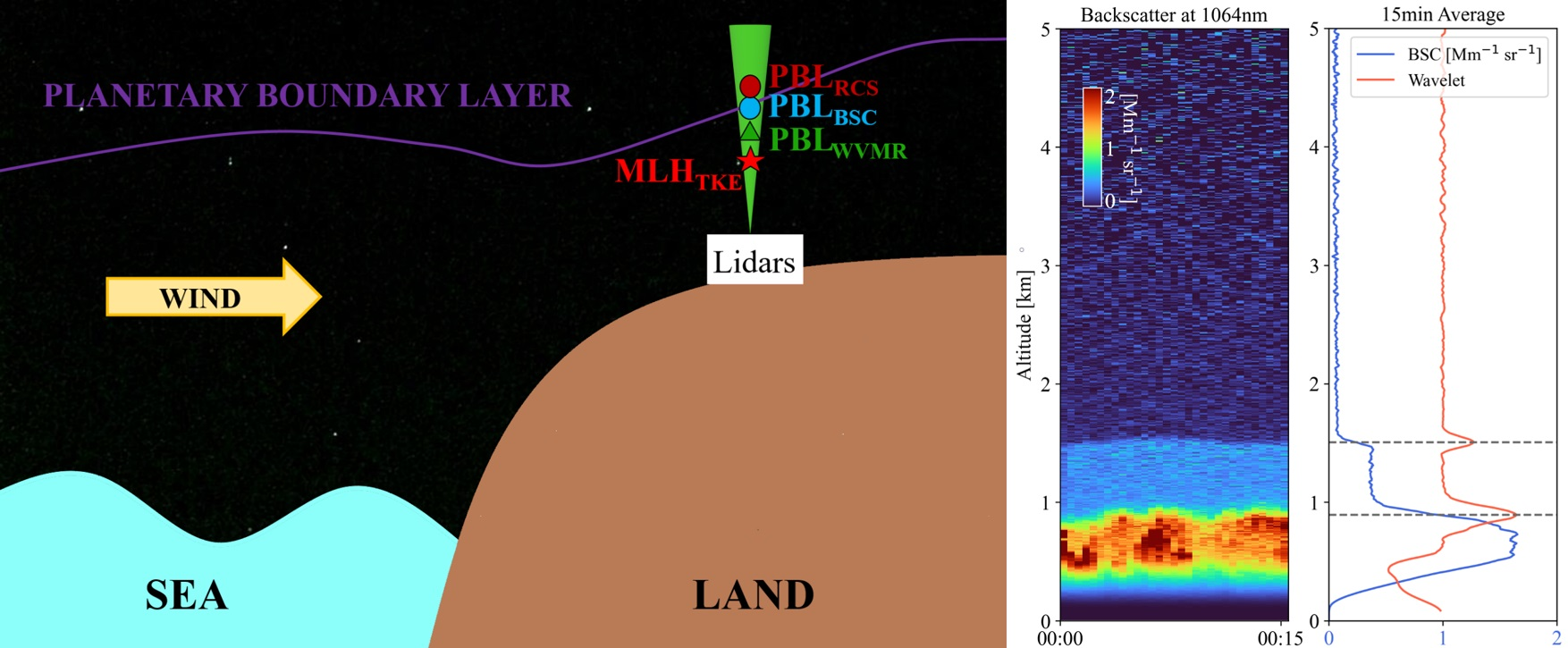
| PBL | Planetary Boundary Layer |
| IBL | Internal Boundary Layer |
| TIBL | Thermal Internal Boundary Layer |
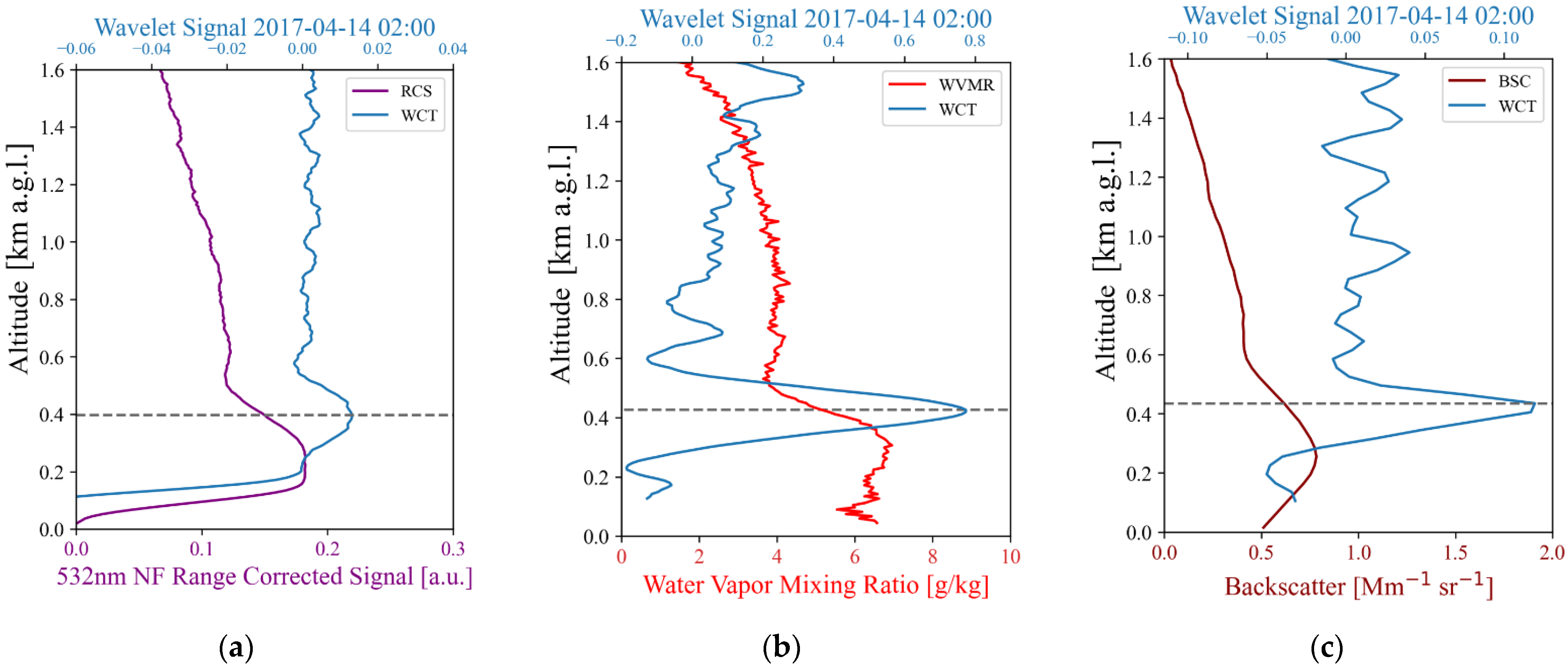
| WCT | Wavelet Covariance Transform |
| TM | Threshold Method |
| RCS | Range Corrected Signal |
| NF | Near Field |
| BSC | Backscatter Coefficient |
| WVMR | Water Vapor Mixing Ratio |
| TKEdr | Turbulent Kinetic Energy dissipation rate |
| PBLRCS | Planetary Boundary Layer height retrieved from WCT on RCS from 532nm NF channel of PollyXT Lidar |
| PBLWVMR | Planetary Boundary Layer height retrieved from WCT on WVMR of PollyXT Lidar |
| PBLBSC | Planetary Boundary Layer height retrieved from WCT on BSC of Halo Wind Lidar |
| MLHTKE | Mixing Layer Height retrieved from TM on TKEdr of Halo Wind Lidar |
| MLH | Mixing layer Height |
| MBE | Mean Bias Error |
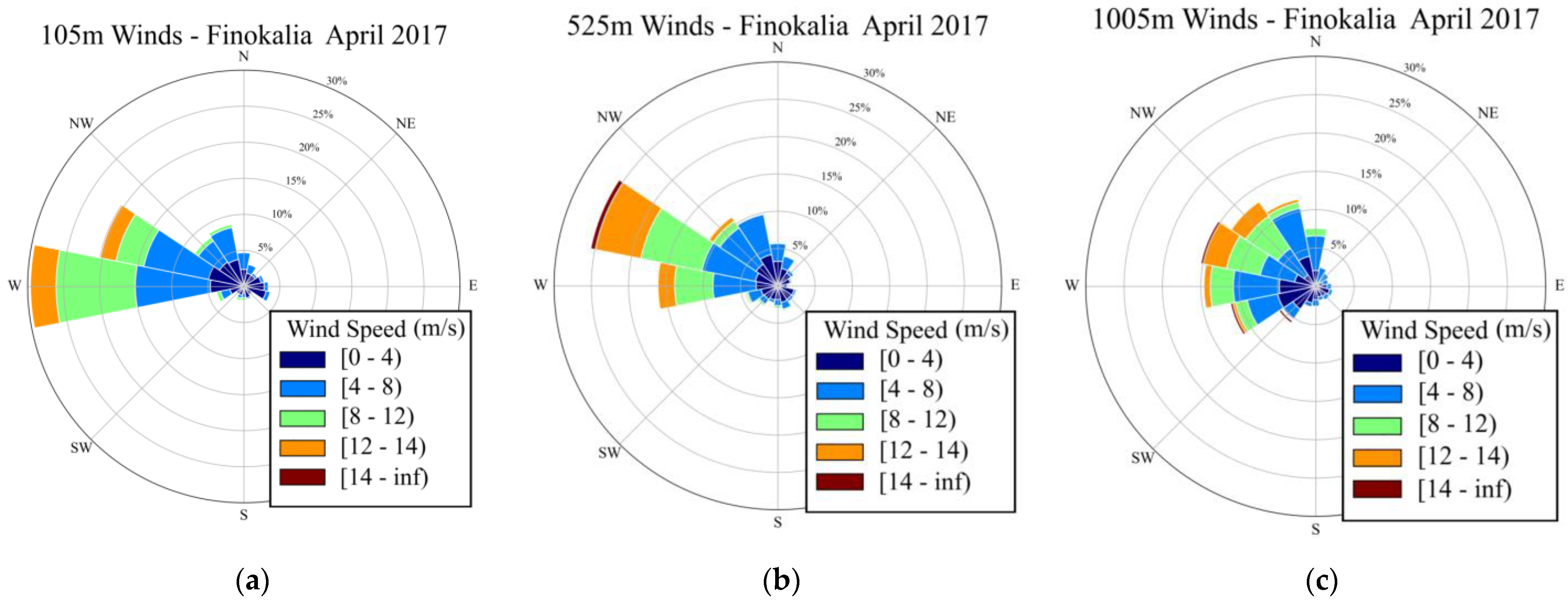
| N, E, S, W | North (0°/360°), East (90°), South (180°), West (270°) |
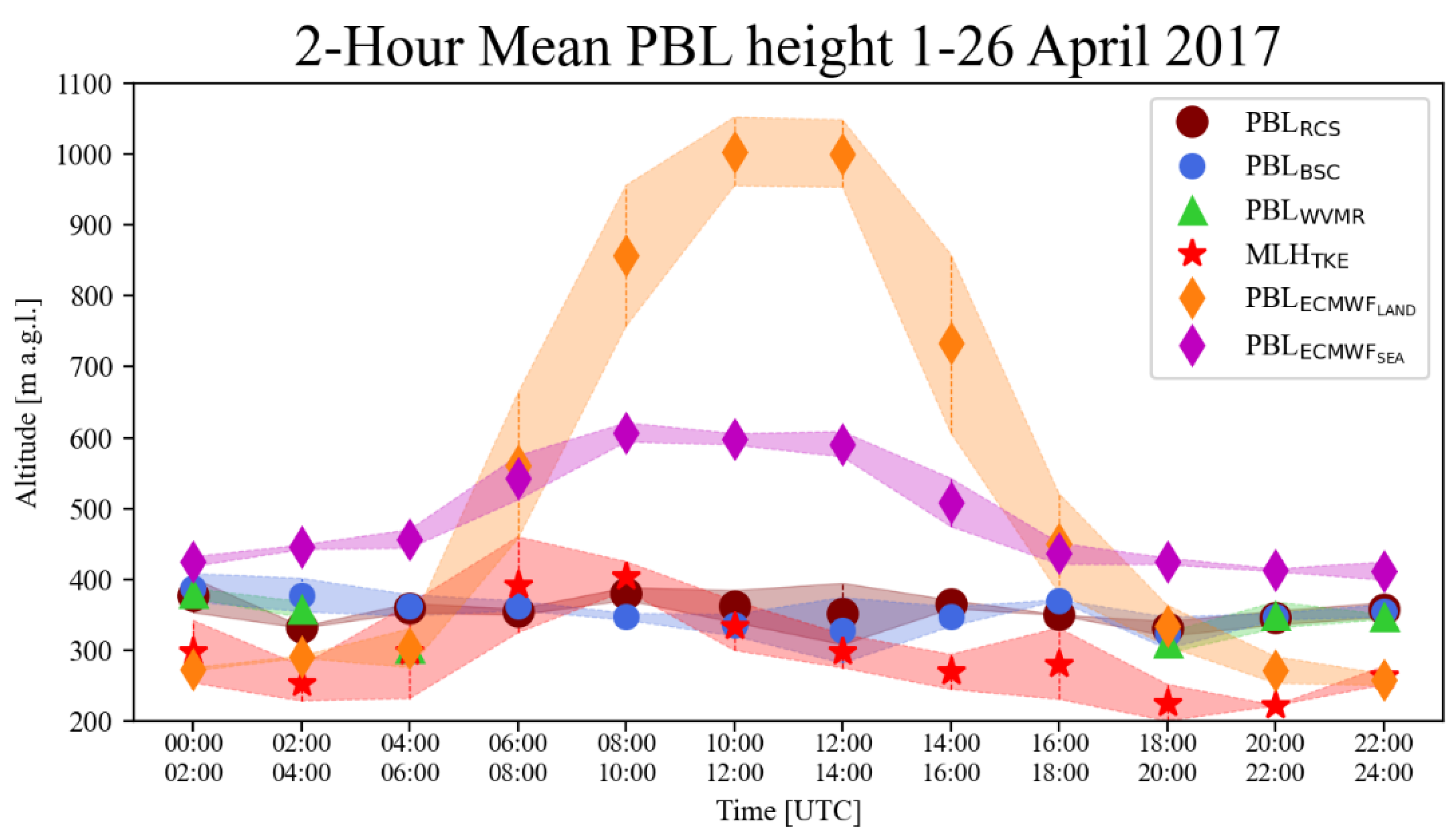
| PBLECMWFSEA | PBL height from ECMWF bin above sea |
| PBLECMWFLAND | PBL height from ECMWF bin above land |
References
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Springer: Berlin/Heidelberg, Germany, 1988; pp. 2–21. [Google Scholar] [CrossRef]
- Wei, J.; Tang, G.; Zhu, X.; Wang, L.; Liu, Z.; Cheng, M.; Münkel, C.; Li, X.; Wang, Y. Thermal internal boundary layer and its effects on air pollutants during summer in a coastal city in North China. J. Environ. Sci. 2018, 70, 37–44. [Google Scholar] [CrossRef] [PubMed]
- Garratt, J.R.; Ryan, B.F. The Structure of the Stably Stratified Internal Boundary Layer in Offshore Flow over the Sea. In Boundary Layer Studies and Applications; Springer: Berlin/Heidelberg, Germany, 1989; pp. 17–40. [Google Scholar] [CrossRef]
- Garratt, J.R. The stably stratified internal boundary layer for steady and diurnally varying offshore flow. Bound. Layer Meteorol. 1987, 38, 369–394. [Google Scholar] [CrossRef]
- Gerasopoulos, E.; Amiridis, V.; Kazadzis, S.; Kokkalis, P.; Eleftheratos, K.; Andreae, M.O.; Andreae, T.W.; El-Askary, H.; Zerefos, C.S. Three-year ground based measurements of aerosol optical depth over the Eastern Mediterranean: The urban environment of Athens. Atmos. Chem. Phys. 2011, 11, 2145–2159. [Google Scholar] [CrossRef]
- Bossioli, E.; Tombrou, M.; Kalogiros, J.; Allan, J.; Bacak, A.; Bezantakos, S.; Biskos, G.; Coe, H.; Jones, B.T.; Kouvarakis, G.; et al. Atmospheric composition in the Eastern Mediterranean: Influence of biomass burning during summertime using the WRF-Chem model. Atmos. Environ. 2016, 132, 317–331. [Google Scholar] [CrossRef]
- Jacobeit, J. Variations of trough positions and precipitation patterns in the mediterranean area. J. Climatol. 1987, 7, 453–476. [Google Scholar] [CrossRef]
- Lionello, P.; Galati, M.B. Links of the significant wave height distribution in the Mediterranean Sea with the Northern Hemisphere teleconnection patterns. Adv. Geosci. 2008, 17, 13–18. [Google Scholar] [CrossRef]
- Miglietta, M.M.; Moscatello, A.; Conte, D.; Mannarini, G.; Lacorata, G.; Rotunno, R. Numerical analysis of a Mediterranean ‘hurricane’ over south-eastern Italy: Sensitivity experiments to sea surface temperature. Atmos. Res. 2011, 101, 412–426. [Google Scholar] [CrossRef]
- Marinou, E.; Voudouri, K.A.; Tsikoudi, I.; Drakaki, E.; Tsekeri, A.; Rosoldi, M.; Ene, D.; Baars, H.; O’Connor, E.; Amiridis, V.; et al. Geometrical and Microphysical Properties of Clouds Formed in the Presence of Dust above the Eastern Mediterranean. Remote Sens. 2021, 13, 5001. [Google Scholar] [CrossRef]
- Tombrou, M.; Bossioli, E.; Kalogiros, J.; Allan, J.D.; Bacak, A.; Biskos, G.; Coe, H.; Dandou, A.; Kouvarakis, G.; Mihalopoulos, N.; et al. Physical and chemical processes of air masses in the Aegean Sea during Etesians: Aegean-GAME airborne campaign. Sci. Total Environ. 2015, 506–507, 201–216. [Google Scholar] [CrossRef]
- Hoerling, M.; Eischeid, J.; Perlwitz, J.; Quan, X.; Zhang, T.; Pegion, P. On the increased frequency of Mediterranean drought. J. Clim. 2012, 25, 2146–2161. [Google Scholar] [CrossRef]
- Barros, V.; Field, C.; Dokken, D.; Mastrandrea, M.; Mach, K.; Bilir, T.; Chatterjee, M.; Ebi, K.; Estrada, Y.; Genova, R.; et al. Part B: Regional Aspects. Contribution of Working Group II to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change. In IPCC, 2014: Impacts, Adaptation, and Vulnerability; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Solomos, S.; Ansmann, A.; Mamouri, R.-E.; Binietoglou, I.; Patlakas, P.; Marinou, E.; Amiridis, V. Remote sensing and modelling analysis of the extreme dust storm hitting the Middle East and eastern Mediterranean in September 2015. Atmos. Chem. Phys. 2017, 17, 4063–4079. [Google Scholar] [CrossRef]
- Baars, H.; Ansmann, A.; Engelmann, R.; Althausen, D. Continuous monitoring of the boundary-layer top with lidar. Atmos. Chem. Phys. 2008, 8, 7281–7296. [Google Scholar] [CrossRef]
- Kokkalis, P.; Alexiou, D.; Papayannis, A.; Rocadenbosch, F.; Soupiona, O.; Raptis, P.I.; Mylonaki, M.; Tzanis, C.G.; Christodoulakis, J. Application and Testing of the Extended-Kalman-Filtering Technique for Determining the Planetary Boundary-Layer Height over Athens, Greece. Bound. Layer Meteorol. 2020, 176, 125–147. [Google Scholar] [CrossRef]
- Granados-Muñoz, M.J.; Navas-Guzmán, F.; Bravo-Aranda, J.A.; Guerrero-Rascado, J.L.; Lyamani, H.; Fernández-Gálvez, J.; Alados-Arboledas, L. Automatic determination of the planetary boundary layer height using lidar: One-yearanalysis over southeastern Spain. J. Geophys. Res. 2012, 117, D18208. [Google Scholar] [CrossRef]
- Zhang, M.; Tian, P.; Zeng, H.; Wang, L.; Liang, J.; Cao, X.; Zhang, L. A Comparison of Wintertime Atmospheric Boundary Layer Heights Determined by Tethered Balloon Soundings and Lidar at the Site of SACOL. Remote Sens. 2021, 13, 1781. [Google Scholar] [CrossRef]
- Dang, R.; Yang, Y.; Hu, X.-M.; Wang, Z.; Zhang, S. A Review of Techniques for Diagnosing the Atmospheric Boundary Layer Height (ABLH) Using Aerosol Lidar Data. Remote Sens. 2019, 11, 1590. [Google Scholar] [CrossRef]
- Kim, M.-H.; Yeo, H.; Park, S.; Park, D.-H.; Omar, A.; Nishizawa, T.; Shimizu, A.; Kim, S.-W. Assessing CALIOP-Derived Planetary Boundary Layer Height Using Ground-Based Lidar. Remote Sens. 2021, 13, 1496. [Google Scholar] [CrossRef]
- Vakkari, V.; O’Connor, E.J.; Nisantzi, A.; Mamouri, R.E.; Hadjimitsis, D.G. Low-level mixing height detection in coastal locations with a scanning Doppler lidar. Atmos. Meas. Tech. 2015, 8, 1875–1885. [Google Scholar] [CrossRef]
- Amiridis, V.; Melas, D.; Balis, D.S.; Papayannis, A.; Founda, D.; Katragkou, E.; Giannakaki, E.; Mamouri, R.E.; Gerasopoulos, E.; Zerefos, C. Aerosol Lidar observations and model calculations of the Planetary Boundary Layer evolution over Greece, during the March 2006 Total Solar Eclipse. Atmos. Chem. Phys. 2007, 7, 6181–6189. [Google Scholar] [CrossRef]
- Tsaknakis, G.; Papayannis, A.; Kokkalis, P.; Amiridis, V.; Kambezidis, H.D.; Mamouri, R.E.; Georgoussis, G.; Avdikos, G. Inter-comparison of lidar and ceilometer retrievals for aerosol and Planetary Boundary Layer profiling over Athens, Greece. Atmos. Meas. Tech. 2011, 4, 1261–1273. [Google Scholar] [CrossRef]
- Tombrou, M.; Dandou, A.; Helmis, C.; Akylas, E.; Angelopoulos, G.; Flocas, H.; Assimakopoulos, V.; Soulakellis, N. Model evaluation of the atmospheric boundary layer and mixed-layer evolution. Bound. Layer Meteorol. 2007, 124, 61–79. [Google Scholar] [CrossRef]
- Dandou, A.; Tombrou, M.; Schäfer, K.; Emeis, S.; Protonotariou, A.P.; Bossioli, E.; Soulakellis, N.; Suppan, P. A Comparison between Modelled and Measured Mixing-Layer Height over Munich. Bound. Layer Meteorol. 2009, 131, 425–440. [Google Scholar] [CrossRef]
- Dandou, A.; Tombrou, M.; Kalogiros, J.; Bossioli, E.; Biskos, G.; Mihalopoulos, N.; Coe, H. Investigation of Turbulence Parametrization Schemes with Reference to the Atmospheric Boundary Layer over the Aegean Sea during Etesian Winds. Bound. Layer Meteorol. 2017, 164, 303–329. [Google Scholar] [CrossRef]
- The PRE-TECT Experimental Campaign. Available online: http://PRE-TECT.space.noa.gr/ (accessed on 15 August 2022).
- Engelmann, R.; Kanitz, T.; Baars, H.; Heese, B.; Althausen, D.; Skupin, A.; Wandinger, U.; Komppula, M.; Stachlewska, I.S.; Amiridis, V.; et al. The automated multiwavelength Raman polarization and water-vapor lidar PollyXT: The neXT generation. Atmos. Meas. Tech. 2016, 9, 1767–1784. [Google Scholar] [CrossRef]
- Pearson, G.; Davies, F.; Collier, C. An Analysis of the Performance of the UFAM Pulsed Doppler Lidar for Observing the Boundary Layer. J. Atmos. Ocean. Technol. 2009, 26, 240–250. [Google Scholar] [CrossRef]
- Manninen, A.J.; O’Connor, E.J.; Vakkari, V.; Petäjä, T. A generalised background correction algorithm for a Halo Doppler lidar and its application to data from Finland. Atmos. Meas. Tech. 2016, 9, 817–827. [Google Scholar] [CrossRef]
- Whiteman, D.N.; Melfi, S.H.; Ferrare, R.A. Raman lidar system for the measurement of water vapor and aerosols in the Earth’s atmosphere. Appl. Opt. 1992, 31, 3068–3082. [Google Scholar] [CrossRef]
- Dai, G.; Althausen, D.; Hofer, J.; Engelmann, R.; Seifert, P.; Bühl, J.; Mamouri, R.-E.; Wu, S.; Ansmann, A. Calibration of Raman lidar water vapor profiles by means of AERONET photometer observations and GDAS meteorological data. Atmos. Meas. Tech. 2018, 11, 2735–2748. [Google Scholar] [CrossRef]
- Foth, A.; Baars, H.; Di Girolamo, P.; Pospichal, B. Water vapour profiles from Raman lidar automatically calibrated by microwave radiometer data during HOPE. Atmos. Chem. Phys. 2015, 15, 7753–7763. [Google Scholar] [CrossRef]
- Manninen, A.J.; Marke, T.; Tuononen, M.J.; O’Connor, E.J. Atmospheric boundary layer classification with Doppler lidar. J. Geophys. Res. Atmos. 2018, 123, 8172–8189. [Google Scholar] [CrossRef]
- Vakkari, V.; Manninen, A.J.; O’Connor, E.J.; Schween, J.H.; van Zyl, P.G.; Marinou, E. A novel post-processing algorithm for Halo Doppler lidars. Atmos. Meas. Tech. 2019, 12, 839–852. [Google Scholar] [CrossRef]
- Browning, K.A.; Wexler, R. The Determination of Kinematic Properties of a Wind Field Using Doppler Radar. J. Appl. Meteorol. Climatol. 1968, 7, 105–113. [Google Scholar] [CrossRef]
- O’Connor, E.J.; Illingworth, A.J.; Brooks, I.M.; Westbrook, C.D.; Hogan, R.J.; Davies, F.; Brooks, B.J. A Method for Estimating the Turbulent Kinetic Energy Dissipation Rate from a Vertically Pointing Doppler Lidar, and Independent Evaluation from Balloon-Borne In Situ Measurements. J. Atmos. Ocean. Technol. 2010, 27, 1652–1664. [Google Scholar] [CrossRef]
- ECMWF ERA5 Information. Available online: https://www.ecmwf.int/en/forecasts/dataset/ecmwf-reanalysis-v5 (accessed on 15 August 2022).
- ECMWF L137 Model Level Definitions. Available online: https://confluence.ecmwf.int/display/udoc/L137+model+level+definitions (accessed on 15 August 2022).
- Vogelezang, D.H.P.; Holtslag, A.A.M. Evaluation and model impacts of alternative boundary-layer height formulations. Bound. Layer Meteorol. 1996, 81, 245–269. [Google Scholar] [CrossRef]
- Copernicus Climate Data Store (CDS). Available online: https://cds.climate.copernicus.eu/ (accessed on 15 August 2022).
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Zhiquan, L.; Berner, J.; Wang, W.; Powers, J.G.; Duda, M.G.; Barker, D.M.; et al. A Description of the Advanced Research WRF Model Version 4; NCAR Technial Note NCAR/TN-475+STR; NCAR: Boulder, CO, USA, 2019; p. 145. [Google Scholar]
- Stohl, A.; Forster, C.; Frank, A.; Seibert, P.; Wotawa, G. Technical note: The Lagrangian particle dispersion model FLEXPART version 6.2. Atmos. Chem. Phys. 2005, 5, 2461–2474. [Google Scholar] [CrossRef]
- Pisso, I.; Sollum, E.; Grythe, H.; Kristiansen, N.I.; Cassiani, M.; Eckhardt, S.; Arnold, D.; Morton, D.; Thompson, R.L.; Groot Zwaaftink, C.D.; et al. FLEXPART 10.4 (Version 10.4). Geosci. Model Dev. Discuss. Zenodo 2019, 12, 1–43. [Google Scholar] [CrossRef]
- Stohl, A.; Prata, A.J.; Eckhardt, S.; Clarisse, L.; Durant, A.; Henne, S.; Kristiansen, N.I.; Minikin, A.; Schumann, U.; Seibert, P.; et al. Determination of time- and height-resolved volcanic ash emissions and 20 their use for quantitative ash dispersion modeling: The 2010 Eyjafjallajökull eruption. Atmos. Chem. Phys. 2011, 11, 4333–4351. [Google Scholar] [CrossRef]
- Brooks, I.M. Finding Boundary Layer Top: Application of a Wavelet Covariance Transform to Lidar Backscatter Profiles. J. Atmos. Ocean. Technol. 2003, 20, 1092–1105. [Google Scholar] [CrossRef]
- Schween, J.H.; Hirsikko, A.; Löhnert, U.; Crewell, S. Mixing-layer height retrieval with ceilometer and Doppler lidar: From case studies to long-term assessment. Atmos. Meas. Tech. 2014, 7, 3685–3704. [Google Scholar] [CrossRef]
- ACTRIS, The Aerosol, Clouds and Trace Gases Research Infrastructure. Available online: https://www.actris.eu (accessed on 15 August 2022).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PollyXT Lidar Specifications | |
|---|---|
| Operating Wavelengths | 355 nm, 532 nm, 1064 nm |
| Number of channels | 12 |
| Height resolution | 7.5 m |
| Time resolution | 30 s |
| Maximum Altitude | 40 km |
| Pre-Trigger | 256 bins |
| Repetition rate of laser | 20 Hz |
| Photomultiplier voltage | 127 Volts |
| Zenith angle of measurement | 5° |
| Polarization | Cross and Total |
| Halo Wind Lidar Specifications | |
|---|---|
| Wavelength | 1.5 μm |
| Detector | heterodyne |
| Pulse repetition frequency | 15 kHz |
| Nyquist velocity | 20 ms−1 |
| Sampling frequency | 50 MHz |
| Velocity resolution | 0.038 ms−1 |
| Height resolution | 30 m |
| Range | 90–9600 m |
| Pulse duration | 0.2 µs |
| Instrument | Product | Method |
|---|---|---|
| PollyXT Lidar | RCS | WCT |
| PollyXT Lidar | WVMR | WCT |
| Halo Wind Lidar | BSC | WCT |
| Halo Wind Lidar | TKEdr | TM |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsikoudi, I.; Marinou, E.; Vakkari, V.; Gialitaki, A.; Tsichla, M.; Amiridis, V.; Komppula, M.; Raptis, I.P.; Kampouri, A.; Daskalopoulou, V.; et al. PBL Height Retrievals at a Coastal Site Using Multi-Instrument Profiling Methods. Remote Sens. 2022, 14, 4057. https://doi.org/10.3390/rs14164057
Tsikoudi I, Marinou E, Vakkari V, Gialitaki A, Tsichla M, Amiridis V, Komppula M, Raptis IP, Kampouri A, Daskalopoulou V, et al. PBL Height Retrievals at a Coastal Site Using Multi-Instrument Profiling Methods. Remote Sensing. 2022; 14(16):4057. https://doi.org/10.3390/rs14164057
Chicago/Turabian StyleTsikoudi, Ioanna, Eleni Marinou, Ville Vakkari, Anna Gialitaki, Maria Tsichla, Vassilis Amiridis, Mika Komppula, Ioannis Panagiotis Raptis, Anna Kampouri, Vasiliki Daskalopoulou, and et al. 2022. "PBL Height Retrievals at a Coastal Site Using Multi-Instrument Profiling Methods" Remote Sensing 14, no. 16: 4057. https://doi.org/10.3390/rs14164057
APA StyleTsikoudi, I., Marinou, E., Vakkari, V., Gialitaki, A., Tsichla, M., Amiridis, V., Komppula, M., Raptis, I. P., Kampouri, A., Daskalopoulou, V., Mihalopoulos, N., Giannakaki, E., Tombrou, M., & Flocas, H. (2022). PBL Height Retrievals at a Coastal Site Using Multi-Instrument Profiling Methods. Remote Sensing, 14(16), 4057. https://doi.org/10.3390/rs14164057