
Multicriteria Accuracy Assessment of Digital Elevation Models (DEMs) Produced by Airborne P-Band Polarimetric SAR Tomography in Tropical Rainforests

 , ,
, ,
Abstract
:
1. Introduction
- (*)
- The radar signal is mainly backscattered by the upper layer of the canopy so that it does not reach the ground. This limitation is partially overcome with longer wavelengths.
- (**)
- The radar signal is decorrelated by the foliage movement and backscattering changes between two acquisitions in repeat pass interferometry [19]. This limitation may be overcome by the implementation of a dedicated dual-antenna single-pass InSAR system (e.g., SRTM [13]) or a tandem configuration (e.g., TanDEM-X [20]), in which the same radar echo is received simultaneously by the two antennas [21]. Another approach is to use longer wavelengths, such as L-band, used in JERS and ALOS satellites [22], and P-band (wavelength of 69 cm), which will be implemented for the first time in space with the BIOMASS satellite [23,24,25,26].
2. Materials and Methods
2.1. Data
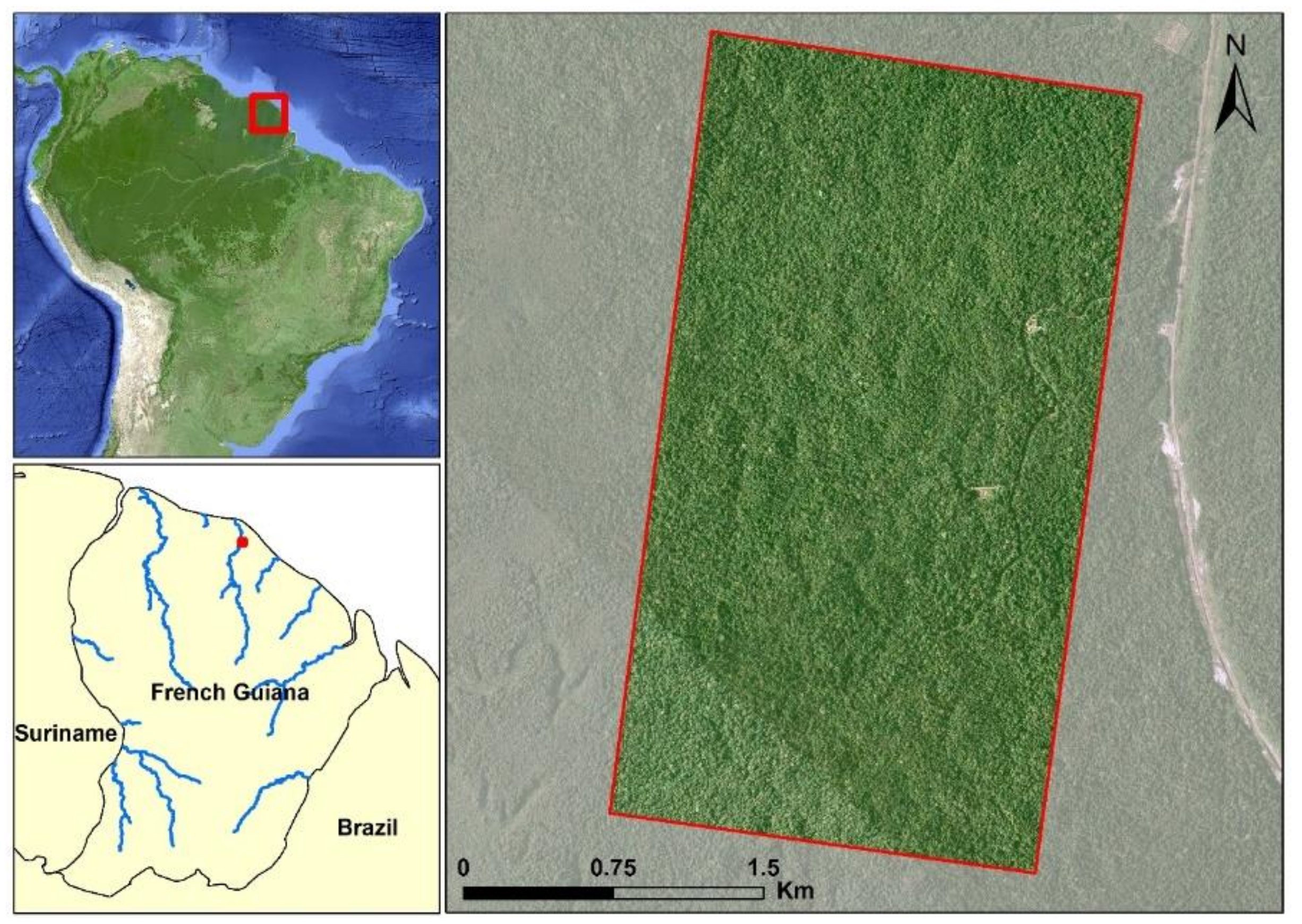
2.1.1. Study Area
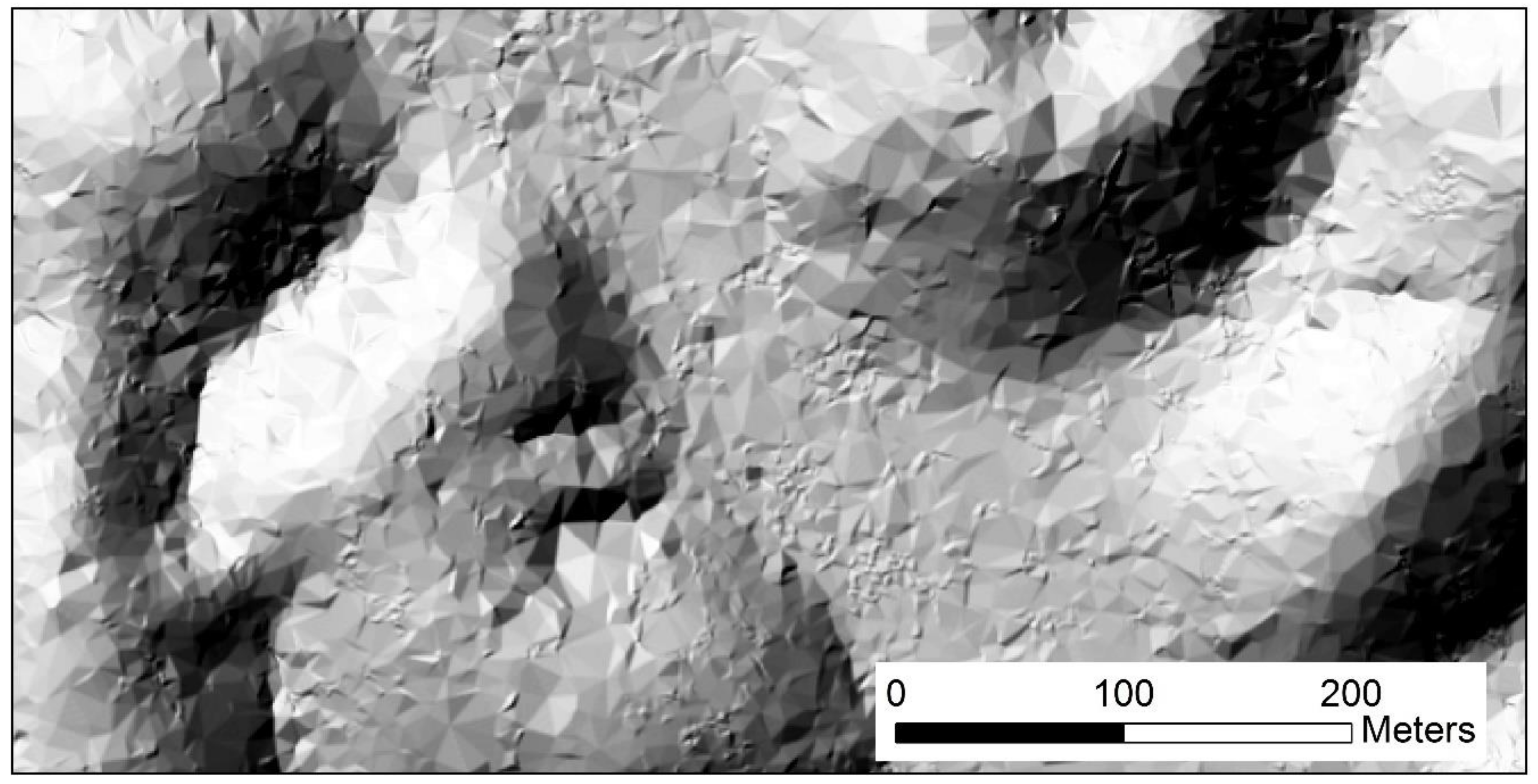
2.1.2. Lidar DTM
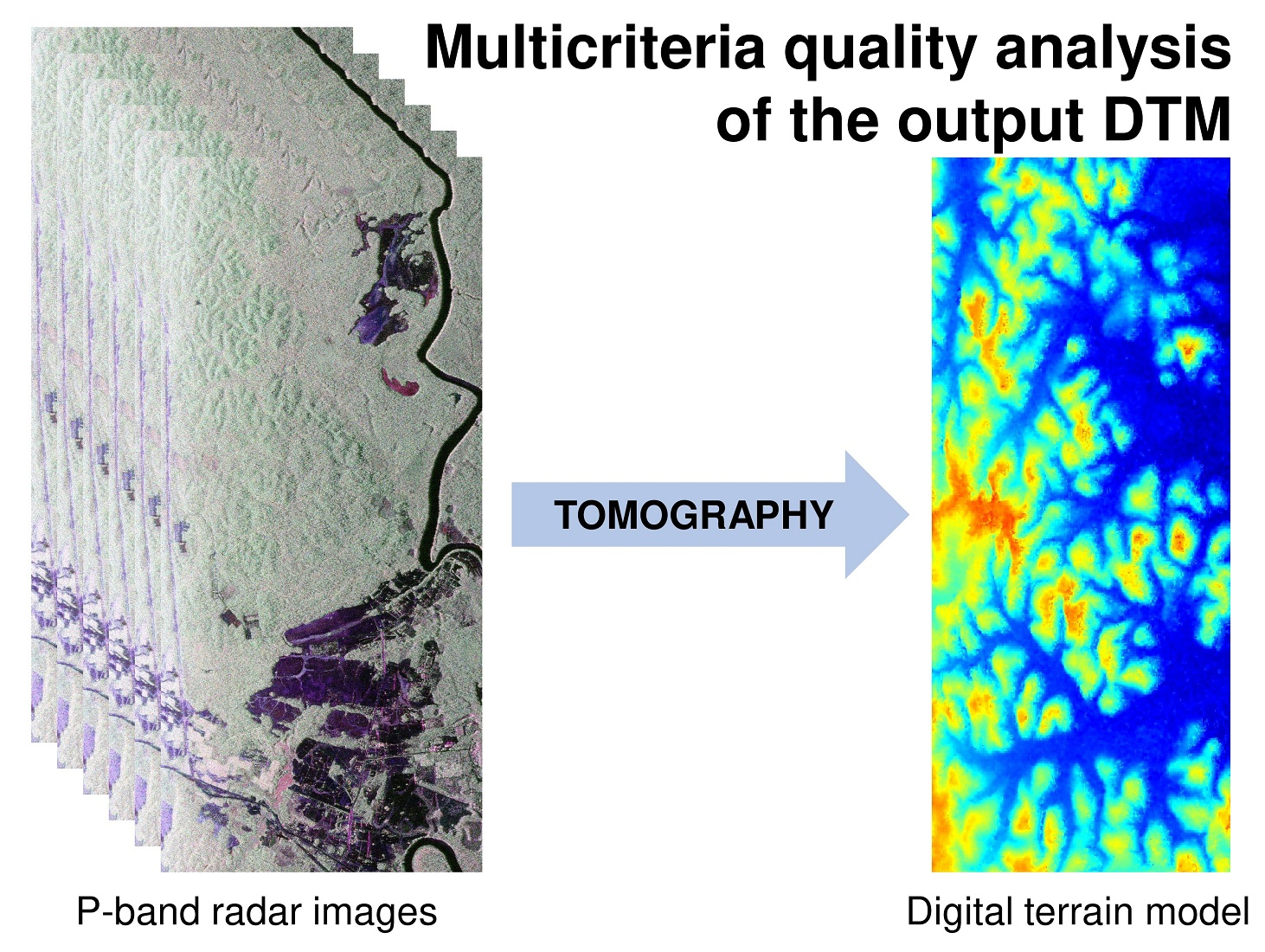
2.1.3. P-Band DTM
2.2. Methods
2.2.1. DEM Quality Assessment Approaches
2.2.2. External Validation
2.2.3. Internal Validation
3. Results
3.1. External Validation
3.1.1. Elevation and Slope Errors
- -
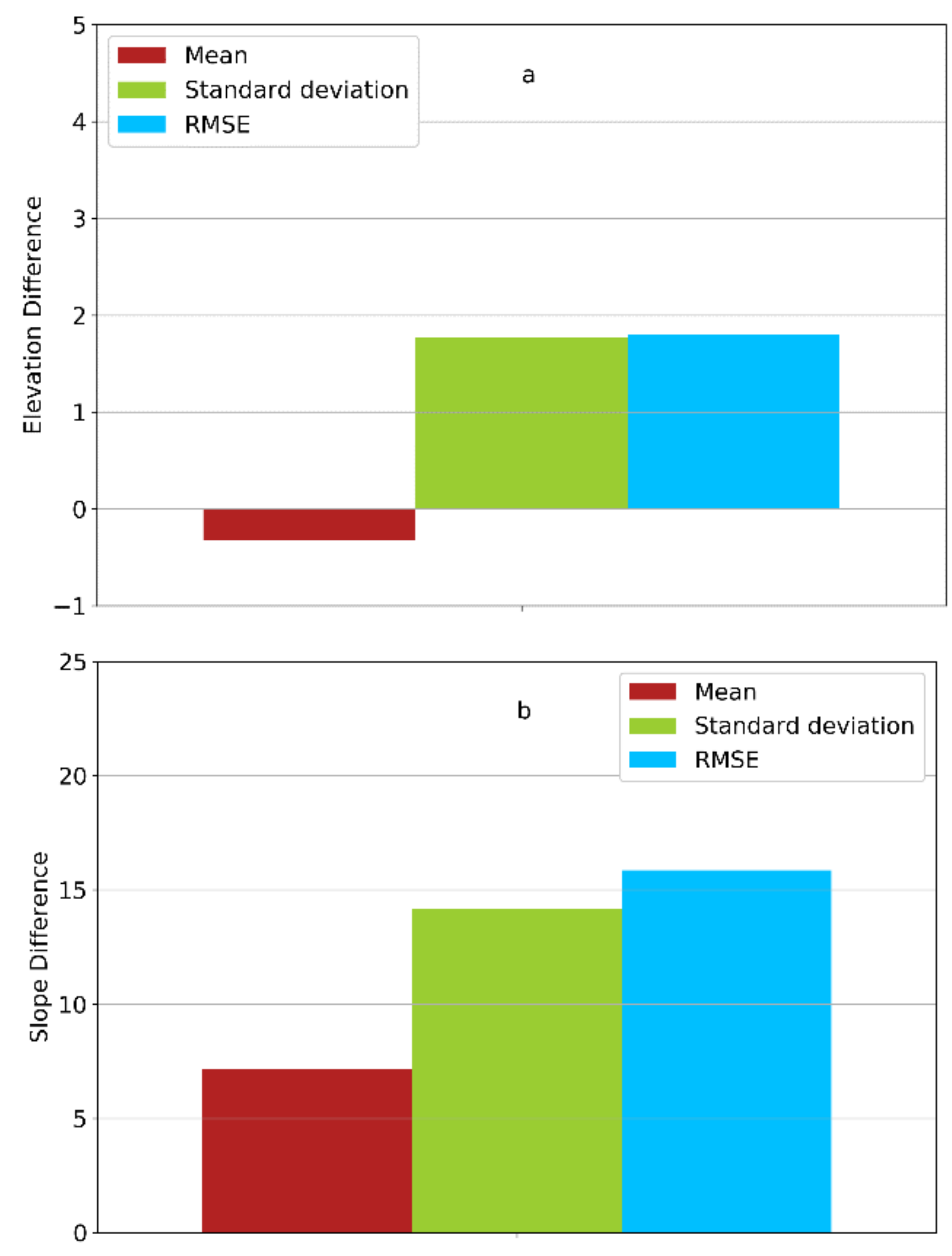
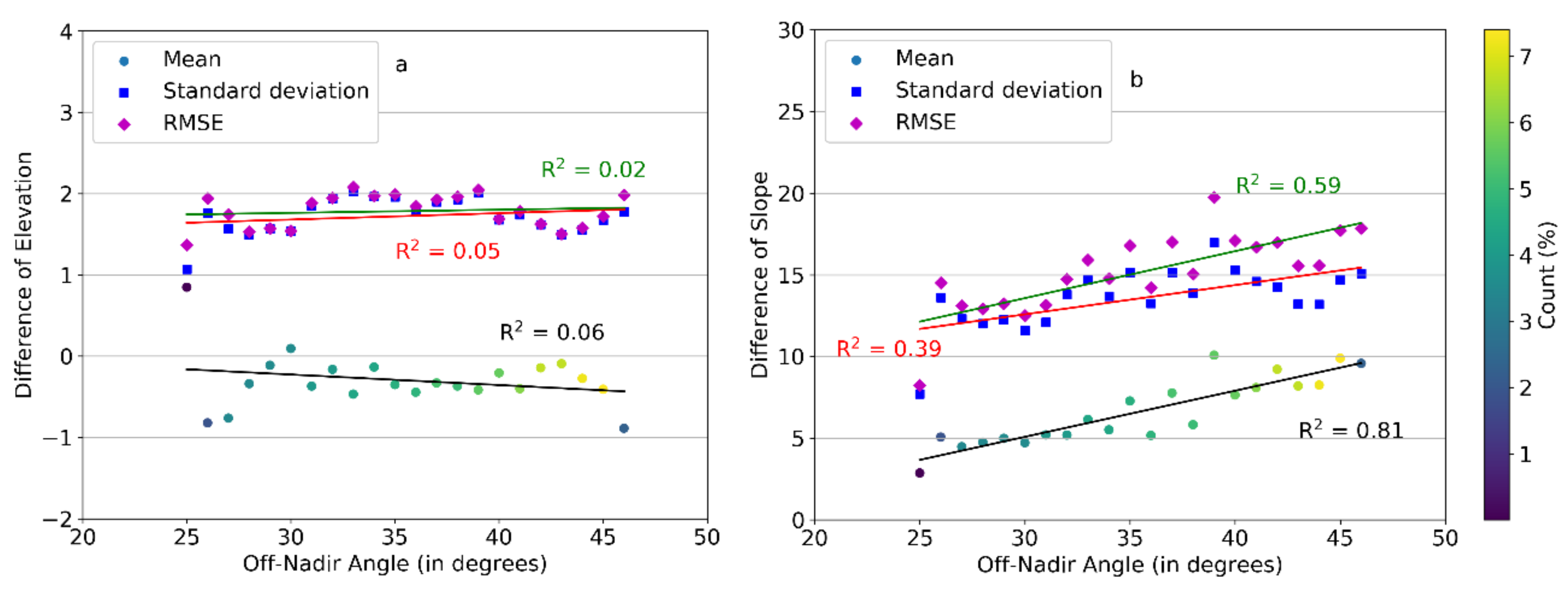
- The mean value of elevation error is negligible, whatever the off-nadir angle. Similarly, the standard deviation is little influenced by this angle and fluctuates around 2 m.
- -
- The slope error (mean and standard deviation) is an increasing function of the off-nadir angle, and it reaches large values. This relationship is certainly related to the decrease of vertical resolution as the off-nadir angle rises.
- -
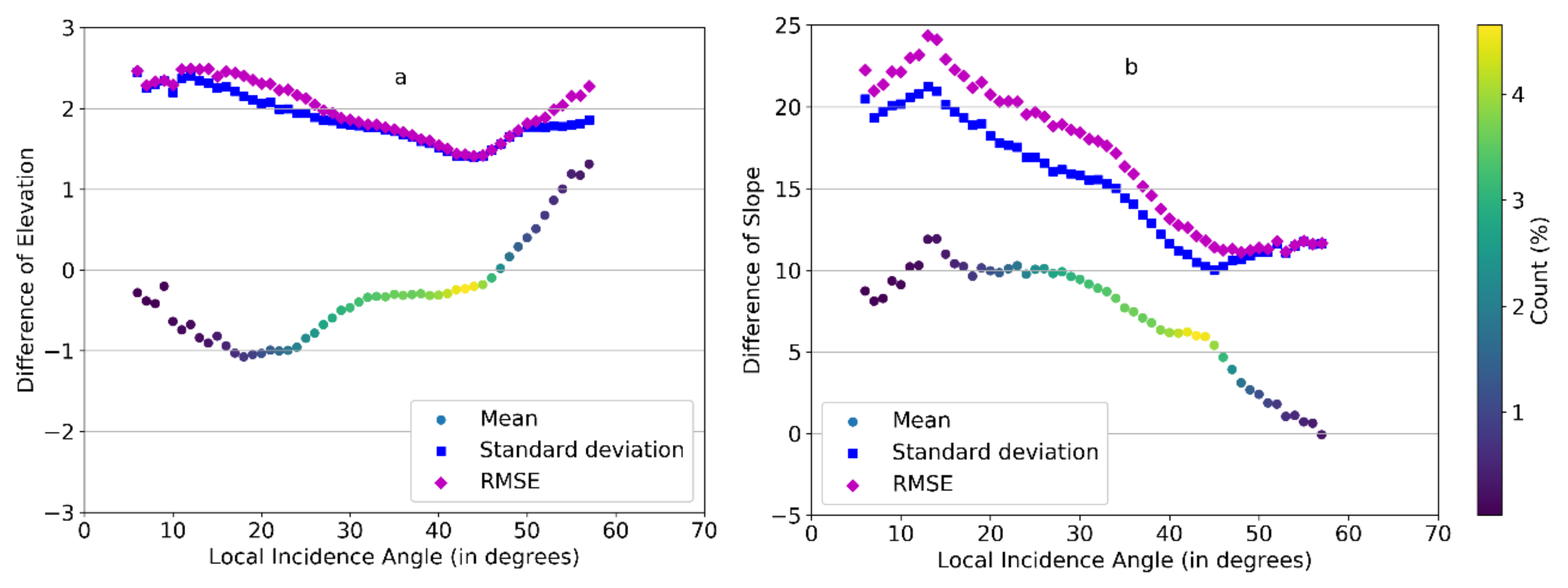
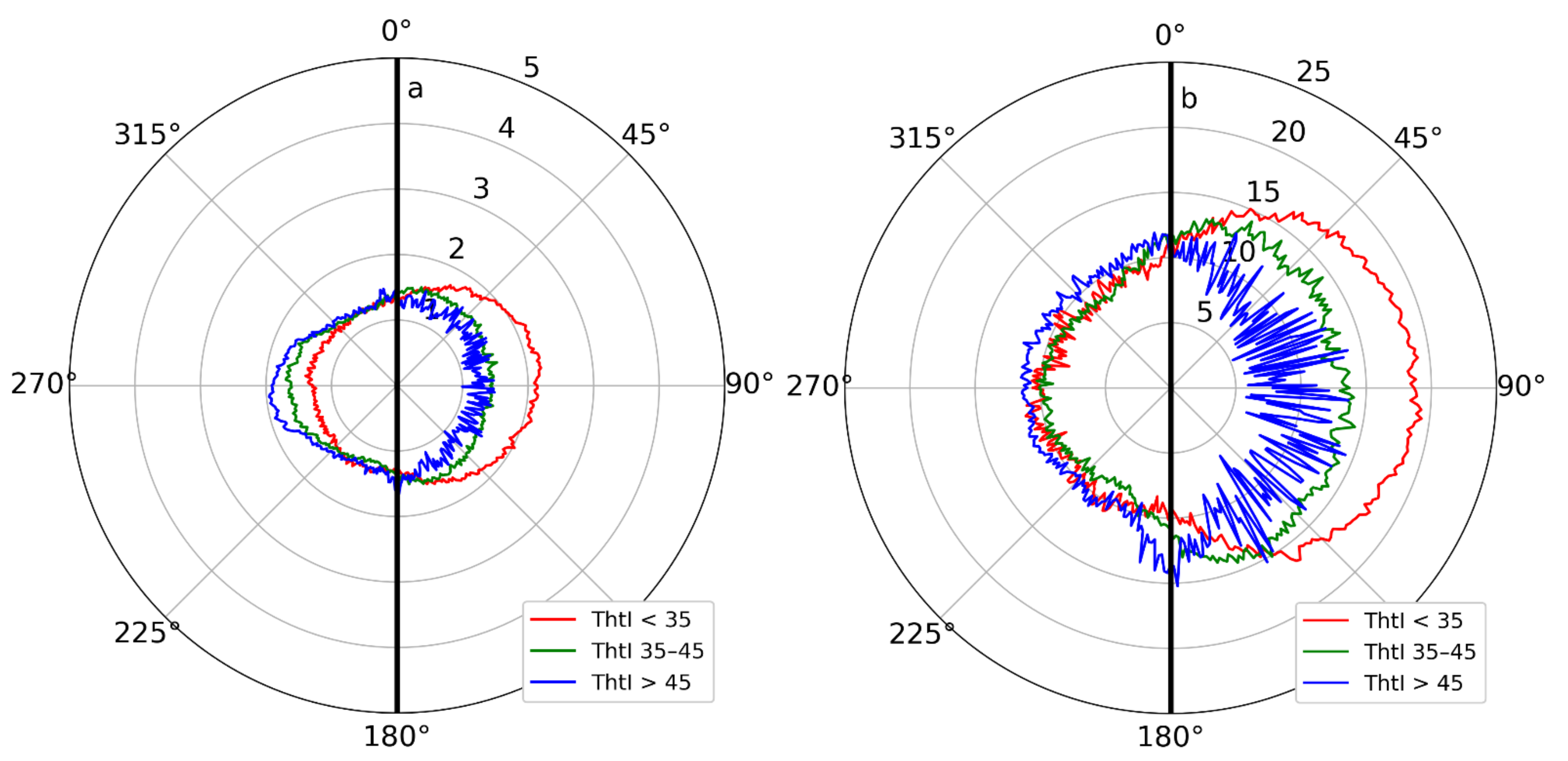
- The mean elevation error is negligible for angles ranging between 30° and 45°, whereas the standard deviation decreases to reach a minimum for a 45° angle. As explained in [88,89,90], the double bounce reflection occurring between the ground and tree trunks is a very energetic and directional scattering mechanism, having a narrow scattering diagram centered around 45°. When the incidence angle reaches this range of values, the dominant double-bounce responses, whose phase center is exactly located at the ground level, can easily be perceived in tomograms and localized in elevation.
- -
- The mean and standard deviation of the slope error are maximum for small local incidence angles (10–20°), which may be explained both by the weaker contribution of double-bounce scattering and by loss of resolution in areas facing the radar, and they decrease as the local incidence angle increases.
- -
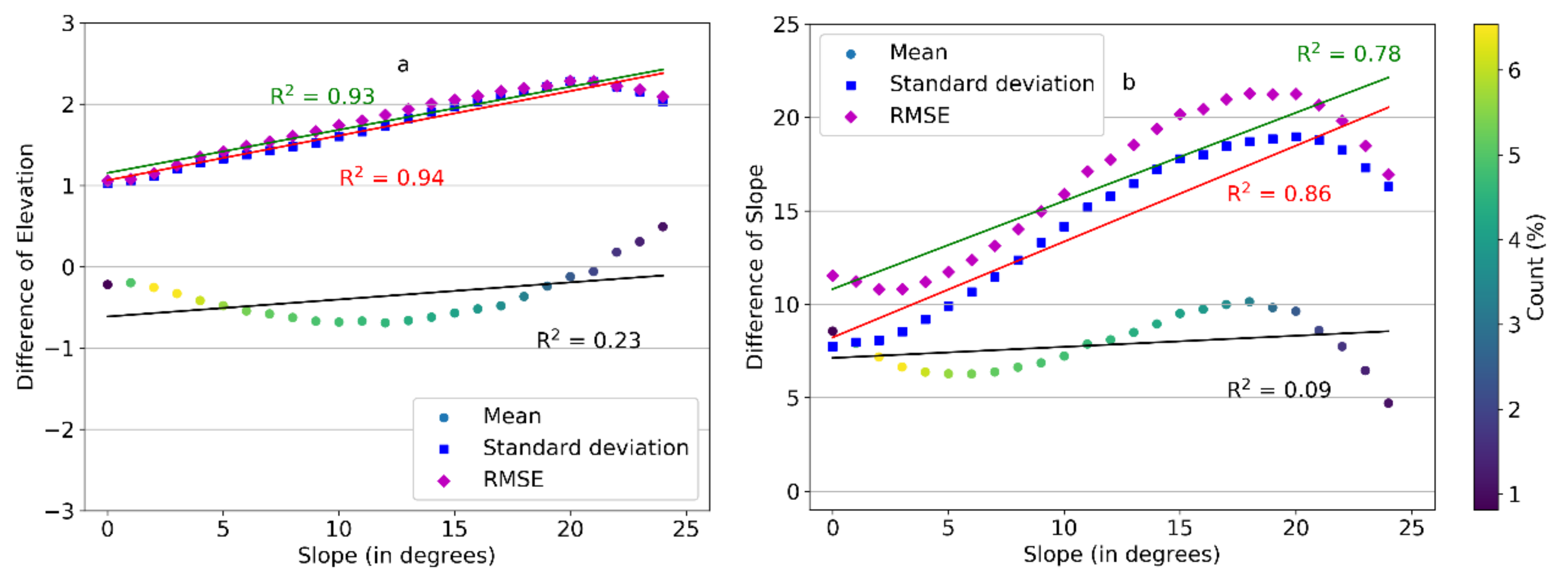
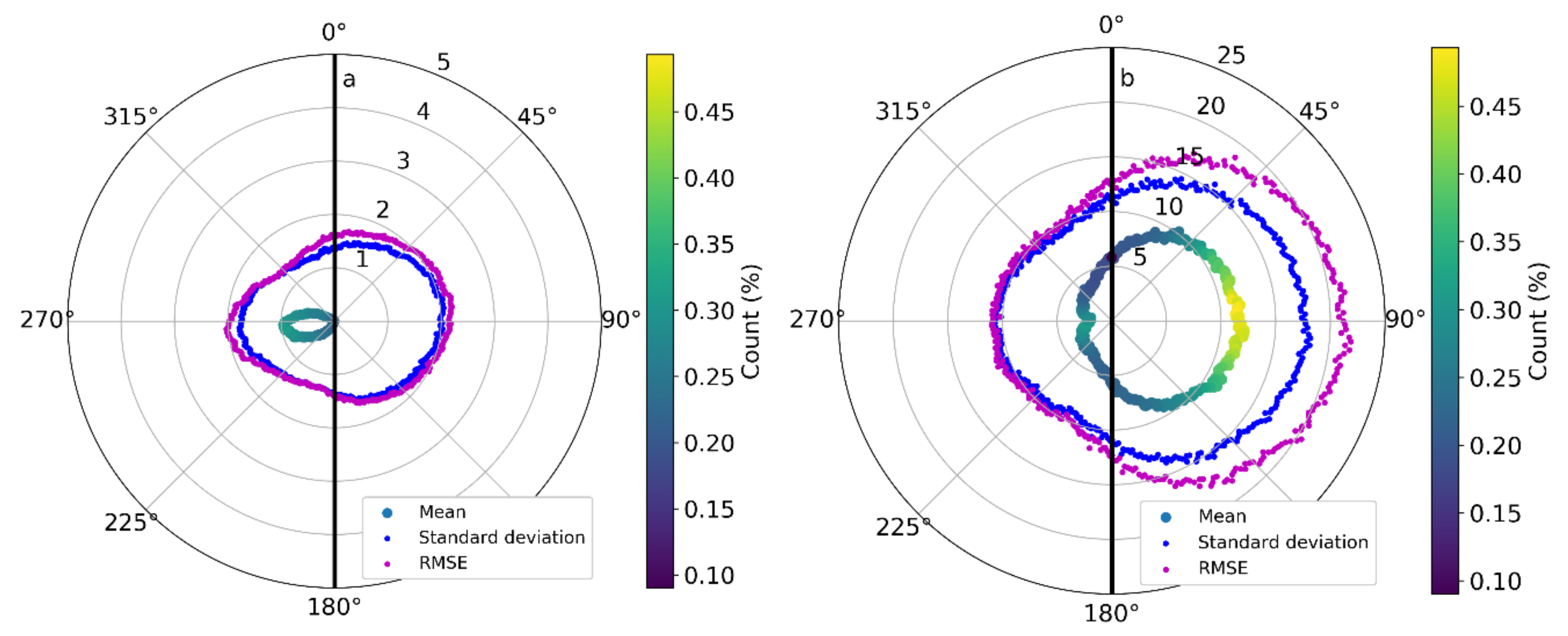
- The mean error in elevation is maximum for slopes facing the radar antenna, probably related to a loss of vertical resolution, while it is almost zero for slopes in the other direction. The standard deviation is higher in the range direction than in the azimuth direction.
- -
- The slope mean error has the opposite behavior, with a maximum in the areas oriented away from the radar. The standard deviation has the same behavior.
- -
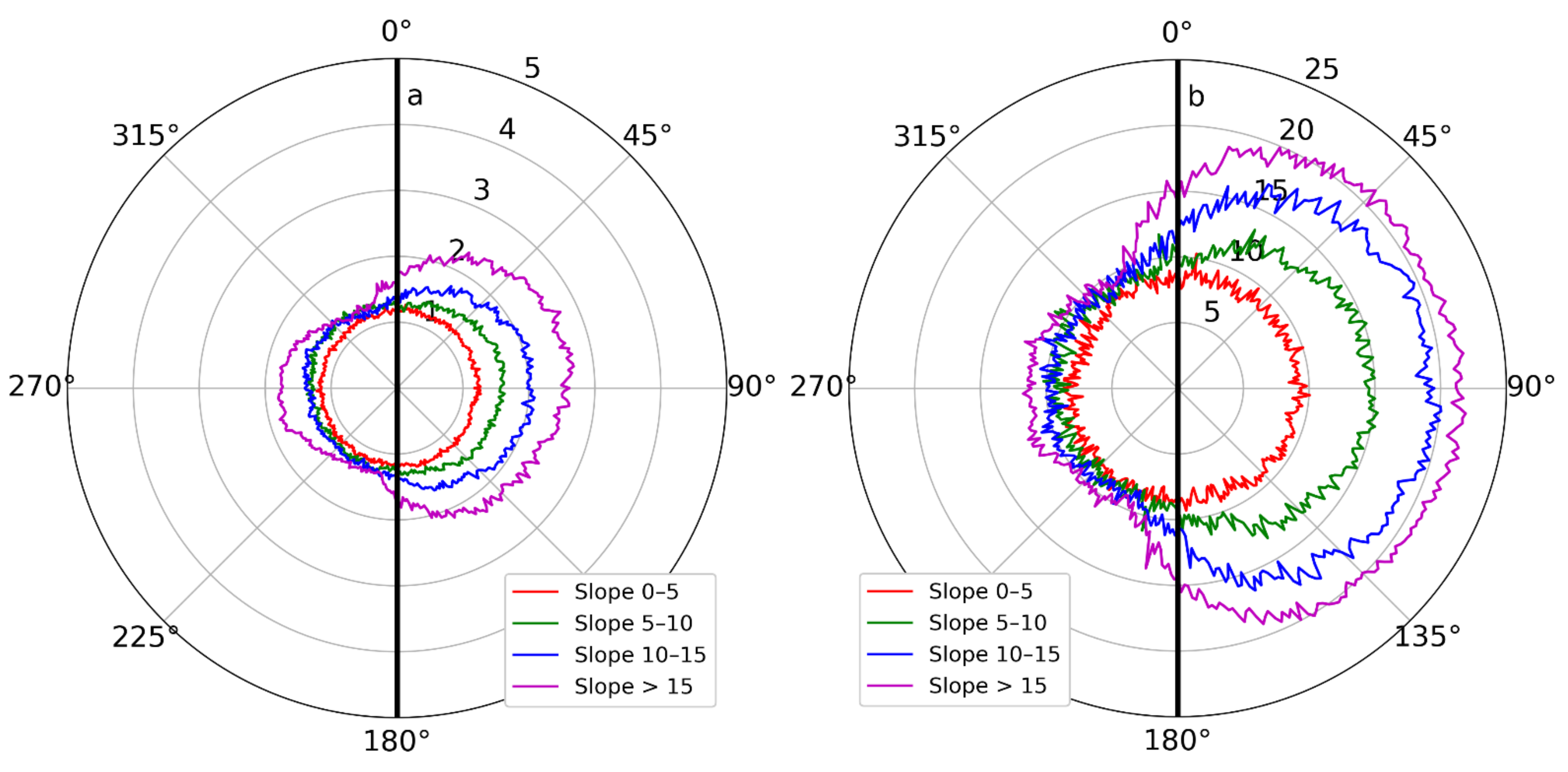
- The standard deviation of the elevation error is negligible and isotropic in flat areas, and it gets higher for larger slope values, mainly for slopes facing away from the radar, which is due to a lack of ground response, with either single- or double-bounce contributions, while it preserves an almost constant value for slopes facing the radar, as confirmed by the profile shown in Figure 14.
- -
- For the largest slope values, the standard deviation is high. The largest local incidence angles produce the maximum error in areas facing the radar, characterized by a lower vertical resolution and by double-bounce scattering contributions with low intensity. The smallest angles produce the highest error in areas facing away from the radar. The intermediate angles (35–45°) lead to the best trade-off, as already shown in Figure 10.
- -
- The standard deviation of the slope error shows a similar tendency as the elevation error with respect to the slope and aspect. For the same reasons, the results are less reliable for steep slopes facing away from the radar.
3.2. Internal Validation
4. Discussion
5. Conclusions
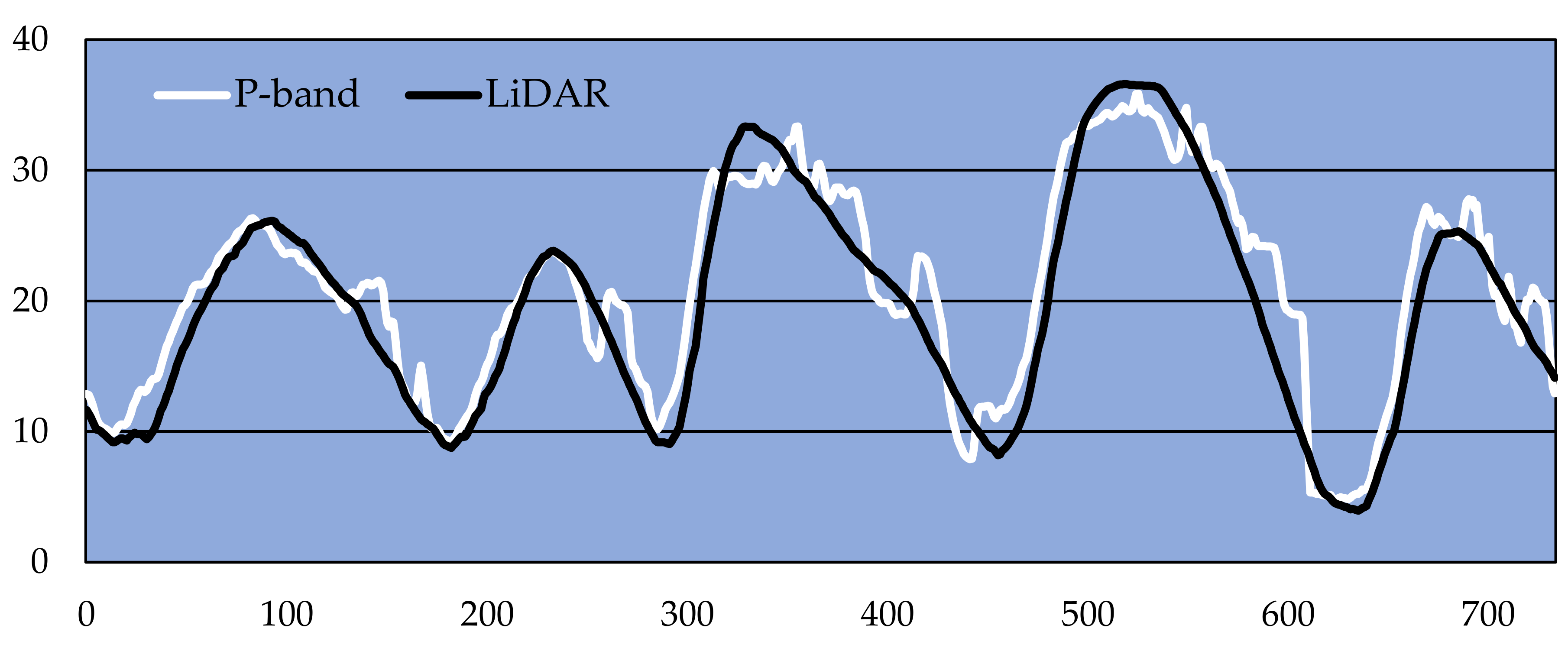
- The P-band radar DTM has a negligible bias, and the elevation RMSE is around 2 m.
- The slope is overestimated with an average error of 7° and a standard deviation of 14°, mainly due to a processing artifact for which easy and direct solutions exist (2° and 2°, respectively, in flat artifact-free areas).
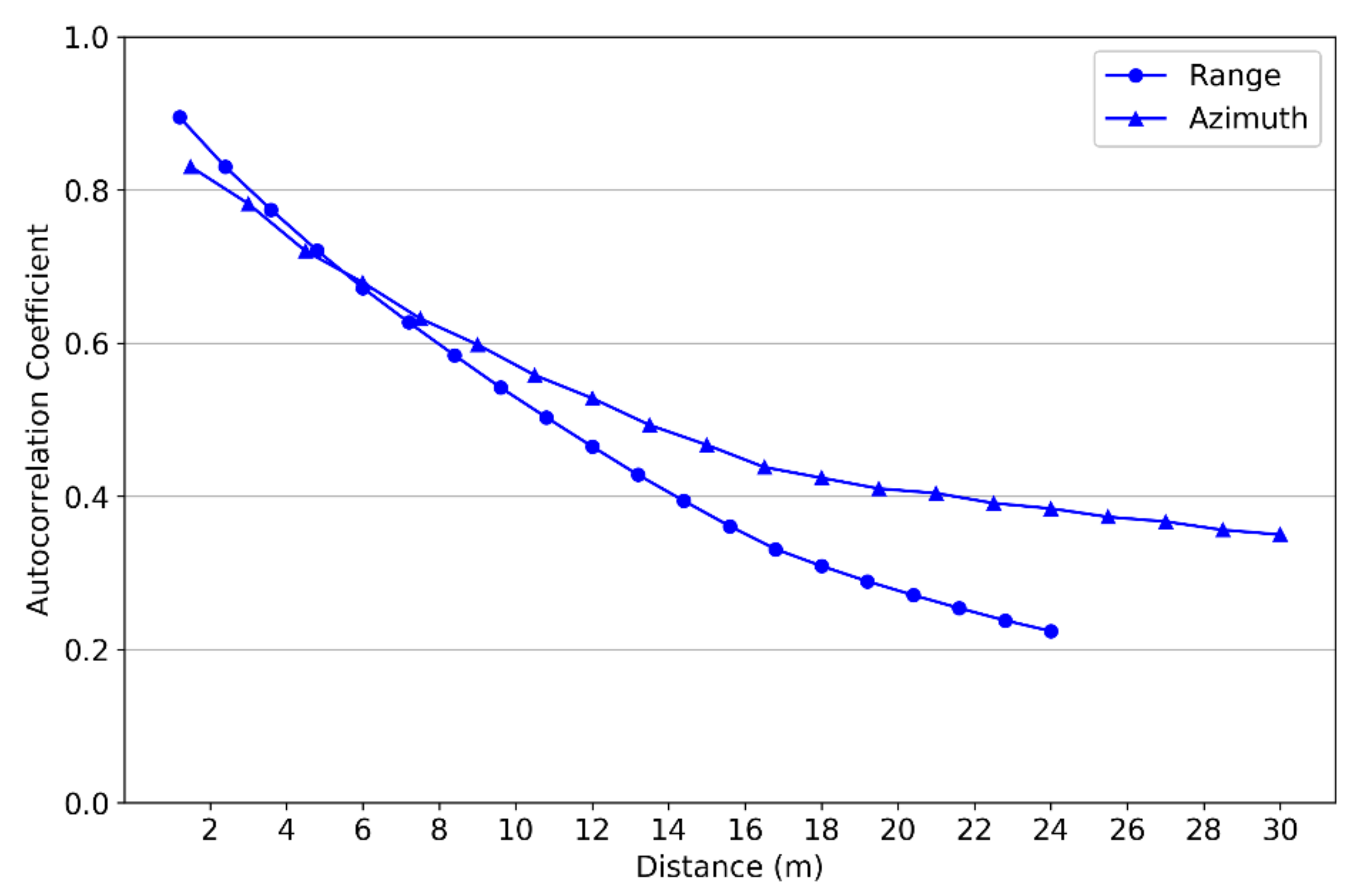
- The elevation and slope errors are more important in the range direction than in the azimuth direction, given the intrinsic effects of the radar slant range geometry.
- The difference between the P-band DTM and the lidar DTM is more important on steep slopes (maximum error around 18–20°); on slopes facing the sensor, the P-band is above the lidar (positive difference), while on slopes looking away from the sensor, the P-band is most often below the lidar (negative difference). In areas with small slopes, the difference is negligible (for both the mean and standard deviation). This is due to the double bounce effect, whose amplitude is maximal for an incidence angle lying close to 45° and over flat areas, over which the tree trunks and the ground are orthogonal. As the terrain slope increases, the error increases due to three effects:
- -
- The loss of resolution for slopes facing the radar, which produces an almost constant error;
- -
- A significant reduction of the amplitude of double-bounce scattering;
- -
- A lack of ground response, with either single- or double-bounce contributions, over slopes facing away from the radar.
- The off-nadir angle has little effect on the elevation error, while the mean and standard deviation of the slope error increase as a function of the off-nadir angle.
- The local incidence angle has little effect on the elevation error, while the mean and standard deviation of the slope error decrease as a function of the local incidence angle.
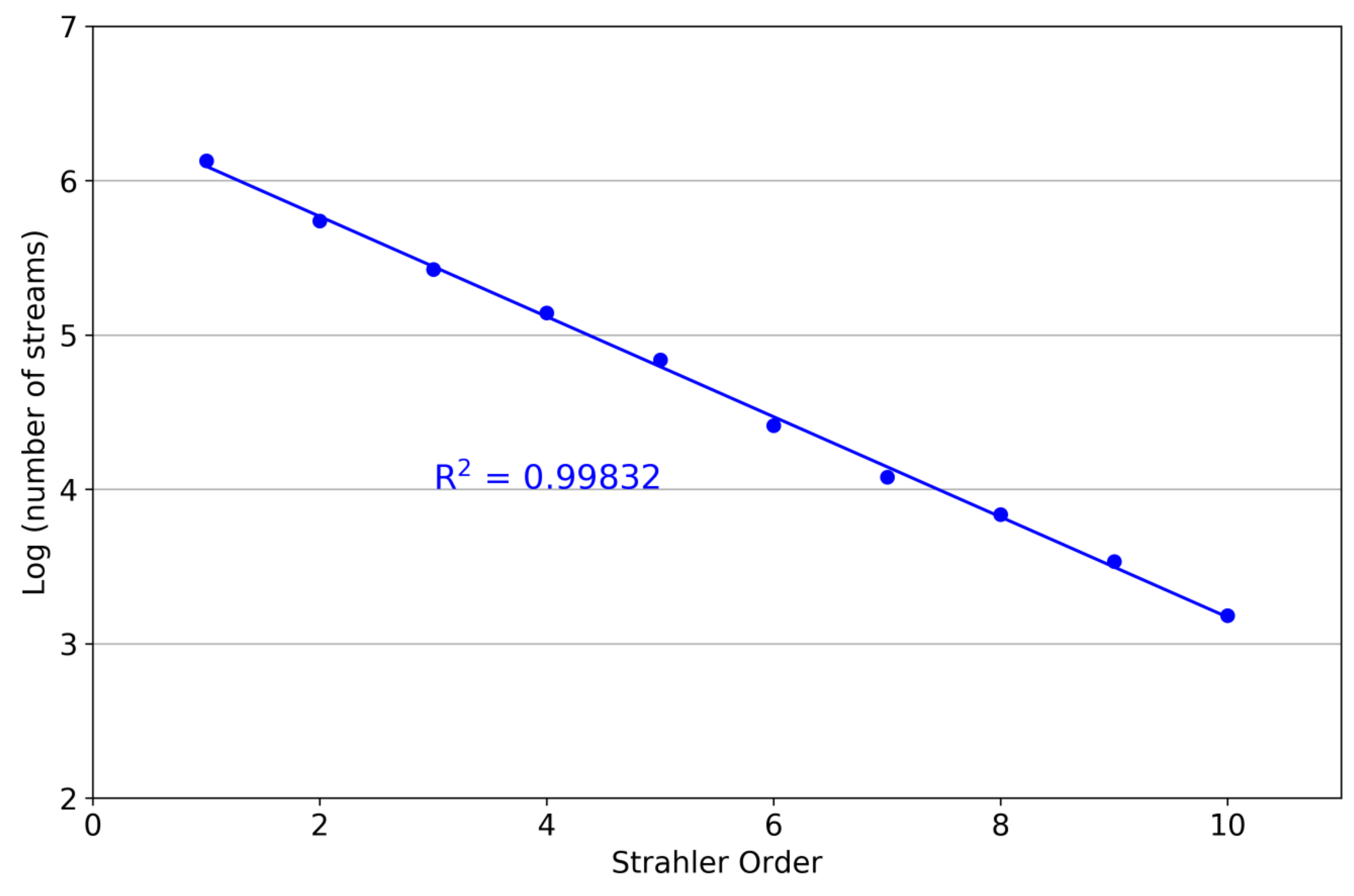
- Internal validation shows that the hydrography is well preserved, with few (2%) and shallow sinks (0.7 m RMS) and good compliance with Horton’s law.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hengl, T.; Reuter, H.I. Geomorphometry: Concepts, Software, Applications; Elsevier: Amsterdam, The Netherlands, 2009; ISBN 978-0-12-374345-9. [Google Scholar]
- Polidori, L.; Caldeira, C.R.T.; Smessaert, M.; Hage, M.E. Digital Elevation Modeling through Forests: The Challenge of the Amazon. Acta Amaz. 2022, 52, 69–80. [Google Scholar] [CrossRef]
- Liu, X. Airborne LiDAR for DEM Generation: Some Critical Issues. Prog. Phys. Geogr. Earth Environ. 2008, 32, 31–49. [Google Scholar] [CrossRef]
- Maguya, A.S.; Junttila, V.; Kauranne, T. Algorithm for Extracting Digital Terrain Models under Forest Canopy from Airborne LiDAR Data. Remote Sens. 2014, 6, 6524–6548. [Google Scholar] [CrossRef]
- Štular, B.; Lozić, E.; Eichert, S. Airborne LiDAR-Derived Digital Elevation Model for Archaeology. Remote Sens. 2021, 13, 1855. [Google Scholar] [CrossRef]
- Baltsavias, E.P. A Comparison between Photogrammetry and Laser Scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Leberl, F. Radargrammetric Image Processing; Artech House: Norwood, MA, USA, 1989; ISBN 978-0-89006-273-9. [Google Scholar]
- Capaldo, P.; Crespi, M.; Fratarcangeli, F.; Nascetti, A.; Pieralice, F. High-Resolution SAR Radargrammetry: A First Application With COSMO-SkyMed SpotLight Imagery. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1100–1104. [Google Scholar] [CrossRef]
- Toutin, T.; Blondel, E.; Clavet, D.; Schmitt, C. Stereo Radargrammetry With Radarsat-2 in the Canadian Arctic. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2601–2609. [Google Scholar] [CrossRef]
- Paquerault, S.; Maitre, H.; Nicolas, J. Radarclinometry for ERS-1 Data Mapping. In Proceedings of the IGARSS ’96. 1996 International Geoscience and Remote Sensing Symposium, Lincoln, NE, USA, 31 May 1996; Volume 1, pp. 503–505. [Google Scholar]
- Le Hégarat-Mascle, S.; Zribi, M.; Ribous, L. Retrieval of Elevation by Radarclinometry in Arid or Semi-arid Regions. Int. J. Remote Sens. 2005, 26, 2877–2899. [Google Scholar] [CrossRef]
- Zebker, H.A.; Goldstein, R.M. Topographic Mapping from Interferometric Synthetic Aperture Radar Observations. J. Geophys. Res. Solid Earth 1986, 91, 4993–4999. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, 1–33. [Google Scholar] [CrossRef] [Green Version]
- Fu, H.; Wang, C.; Zhu, J.; Xie, Q.; Zhang, B. Estimation of Pine Forest Height and Underlying DEM Using Multi-Baseline P-Band PolInSAR Data. Remote Sens. 2016, 8, 820. [Google Scholar] [CrossRef]
- Fu, H.; Zhu, J.; Wang, C.; Wang, H.; Zhao, R. Underlying Topography Estimation over Forest Areas Using High-Resolution P-Band Single-Baseline PolInSAR Data. Remote Sens. 2017, 9, 363. [Google Scholar] [CrossRef]
- D’Alessandro, M.M.; Tebaldini, S. Digital Terrain Model Retrieval in Tropical Forests Through P-Band SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6774–6781. [Google Scholar] [CrossRef]
- Dubois-Fernandez, P.; Oriot, H.; Coulombeix, C.; Cantalloube, H.; Plessis, O.R.D.; Toan, T.L.; Daniel, S.; Chave, J.; Blanc, L.; Davidson, M. TropiSAR, a SAR Data Acquisition Campaign in French Guiana. In Proceedings of the 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 7–10 June 2010; pp. 1–4. [Google Scholar]
- Huang, Y.; Ferro-Famil, L.; Lardeux, C. Polarimetric SAR Tomography of Tropical Forests at P-Band. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 1373–1376. [Google Scholar]
- El Idrissi Essebtey, S.; Villard, L.; Borderies, P.; Koleck, T.; Monvoisin, J.P.; Burban, B.; Le Toan, T. Temporal Decorrelation of Tropical Dense Forest at C-Band: First Insights From the TropiScat-2 Experiment. IEEE Geosci. Remote Sens. Lett. 2020, 17, 928–932. [Google Scholar] [CrossRef]
- Zink, M.; Fiedler, H.; Hajnsek, I.; Krieger, G.; Moreira, A.; Werner, M. The TanDEM-X Mission Concept. In Proceedings of the 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, CO, USA, 31 July–4 August 2006; pp. 1938–1941. [Google Scholar]
- Tebaldini, S.; Ferro-Famil, L. SAR Tomography from Bistatic Single-Pass Interferometers. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Worth, TX, USA, 23 July 2017; pp. 133–136. [Google Scholar]
- Hensley, S.; Van Zyl, J.; Lavalle, M.; Neumann, M.; Michel, T.; Muellerschoen, R.; Pinto, N.; Simard, M.; Moghaddam, M. L-Band and P-Band Studies of Vegetation at JPL. In Proceedings of the 2015 IEEE Radar Conference, Marriott Crystal Gateway, Arlington, VA, USA, 27 October 2015; pp. 516–520. [Google Scholar]
- Le Toan, T.; Quegan, S.; Davidson, M.W.J.; Balzter, H.; Paillou, P.; Papathanassiou, K.; Plummer, S.; Rocca, F.; Saatchi, S.; Shugart, H.; et al. The BIOMASS Mission: Mapping Global Forest Biomass to Better Understand the Terrestrial Carbon Cycle. Remote Sens. Environ. 2011, 115, 2850–2860. [Google Scholar] [CrossRef]
- Quegan, S.; Le Toan, T.; Chave, J.; Dall, J.; Exbrayat, J.-F.; Minh, D.H.T.; Lomas, M.; D’Alessandro, M.M.; Paillou, P.; Papathanassiou, K.; et al. The European Space Agency BIOMASS Mission: Measuring Forest above-Ground Biomass from Space. Remote Sens. Environ. 2019, 227, 44–60. [Google Scholar] [CrossRef]
- Tebaldini, S.; Mariotti D’Alessandro, M.; Dinh, H.T.M.; Rocca, F. P Band Penetration in Tropical and Boreal Forests: Tomographical Results. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 4241–4244. [Google Scholar]
- El Idrissi Essebtey, S.; Villard, L.; Borderies, P.; Koleck, T.; Burban, B.; Le Toan, T. Long-Term Trends of P-Band Temporal Decorrelation Over a Tropical Dense Forest-Experimental Results for the BIOMASS Mission. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Shiroma, G.H.X.; de Macedo, K.A.C.; Wimmer, C.; Moreira, J.R.; Fernandes, D. The Dual-Band PolInSAR Method for Forest Parametrization. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3189–3201. [Google Scholar] [CrossRef]
- Fu, H.Q.; Zhu, J.J.; Wang, C.C.; Zhao, R.; Xie, Q.H. Underlying Topography Estimation Over Forest Areas Using Single-Baseline InSAR Data. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2876–2888. [Google Scholar] [CrossRef]
- Ferro-Famil, L.; Huang, Y.; Pottier, E. Principles and Applications of Polarimetric SAR Tomography for the Characterization of Complex Environments. In VIII Hotine-Marussi Symposium on Mathematical Geodesy; Sneeuw, N., Novák, P., Crespi, M., Sansò, F., Eds.; Springer International Publishing: Cham, Germany, 2016; pp. 243–255. [Google Scholar]
- Aghababaei, H.; Ferraioli, G.; Ferro-Famil, L.; Huang, Y.; Mariotti D’Alessandro, M.; Pascazio, V.; Schirinzi, G.; Tebaldini, S. Forest SAR Tomography: Principles and Applications. IEEE Geosci. Remote Sens. Mag. 2020, 8, 30–45. [Google Scholar] [CrossRef]
- Chandra, M.; Hounam, D. Feasibility of a Spaceborne P-Band SAR for Land Surface Imaging; VED: Friedrichshafen, Germany, 1998. [Google Scholar]
- Villard, L.; Le Toan, T.; Ho Tong Minh, D.; Mermoz, S.; Bouvet, A. 9—Forest Biomass from Radar Remote Sensing. In Land Surface Remote Sensing in Agriculture and Forest; Baghdadi, N., Zribi, M., Eds.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 363–425. ISBN 978-1-78548-103-1. [Google Scholar]
- Polidori, L.; Koleck, T.; Villard, L.; El Hage, M.; Paillou, P.; Le Toan, T. Cartographier Le Relief Sous Les Forêts et Le Substrat Sous Les Déserts de Sable: Les Attentes de La Mission Radar Biomass. Rev. XYZ 2018, 154, 56–61. [Google Scholar]
- Papathanassiou, K.P.; Cloude, S.R.; Pardini, M.; Quiñones, M.J.; Hoekman, D.; Ferro-Famil, L.; Goodenough, D.; Chen, H.; Tebaldini, S.; Neumann, M.; et al. Forest Applications. In Polarimetric Synthetic Aperture Radar: Principles and Application; Hajnsek, I., Desnos, Y.-L., Eds.; Remote Sensing and Digital Image Processing; Springer International Publishing: Cham, Germany, 2021; pp. 59–117. ISBN 978-3-030-56504-6. [Google Scholar]
- Reigber, A.; Moreira, A. First Demonstration of Airborne SAR Tomography Using Multibaseline L-Band Data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2142–2152. [Google Scholar] [CrossRef]
- Aguilera, E.; Nannini, M.; Reigber, A. Wavelet-Based Compressed Sensing for SAR Tomography of Forested Areas. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5283–5295. [Google Scholar] [CrossRef]
- Pardini, M.; Papathanassiou, K. On the Estimation of Ground and Volume Polarimetric Covariances in Forest Scenarios with SAR Tomography. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1860–1864. [Google Scholar] [CrossRef]
- Tebaldini, S.; Rocca, F. Multibaseline Polarimetric SAR Tomography of a Boreal Forest at P- and L-Bands. IEEE Trans. Geosci. Remote Sens. 2012, 50, 232–246. [Google Scholar] [CrossRef]
- Saatchi, S.S.; Chave, J.; Labriere, N.; Barbier, N.; Réjou-Méchain, M.; Ferraz, A.; Tao, S. AfriSAR: Aboveground Biomass for Lope, Mabounie, Mondah, and Rabi Sites, Gabon; ORNL DAAC: Oak Ridge, TN, USA, 2019. [CrossRef]
- Reuter, H.I.; Hengl, T.; Gessler, P.; Soille, P. Chapter 4 Preparation of DEMs for Geomorphometric Analysis. In Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Geomorphometry; Elsevier: Amsterdam, The Netherlands, 2009; Volume 33, pp. 87–120. [Google Scholar]
- Polidori, L.; El Hage, M. Digital Elevation Model Quality Assessment Methods: A Critical Review. Remote Sens. 2020, 12, 3522. [Google Scholar] [CrossRef]
- Mesa-Mingorance, J.L.; Ariza-López, F.J. Accuracy Assessment of Digital Elevation Models (DEMs): A Critical Review of Practices of the Past Three Decades. Remote Sens. 2020, 12, 2630. [Google Scholar] [CrossRef]
- Labrière, N.; Tao, S.; Chave, J.; Scipal, K.; Toan, T.L.; Abernethy, K.; Alonso, A.; Barbier, N.; Bissiengou, P.; Casal, T.; et al. In Situ Reference Datasets From the TropiSAR and AfriSAR Campaigns in Support of Upcoming Spaceborne Biomass Missions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3617–3627. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Bresnahan, P. Accuracy of Airborne Lidar-Derived Elevation. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar] [CrossRef]
- Mallet, C.; Bretar, F. Full-Waveform Topographic Lidar: State-of-the-Art. ISPRS J. Photogramm. Remote Sens. 2009, 64, 1–16. [Google Scholar] [CrossRef]
- Dong, P.; Chen, Q. LiDAR Remote Sensing and Applications; CRC Press: Boca Raton, FL, USA, 2017; ISBN 978-1-351-23334-7. [Google Scholar]
- Ferro-Famil, L.; Pottier, E. 2—SAR Imaging Using Coherent Modes of Diversity: SAR Polarimetry, Interferometry and Tomography. In Microwave Remote Sensing of Land Surface; Baghdadi, N., Zribi, M., Eds.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 67–147. ISBN 978-1-78548-159-8. [Google Scholar]
- Tebaldini, S. Algebraic Synthesis of Forest Scenarios From Multibaseline PolInSAR Data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4132–4142. [Google Scholar] [CrossRef]
- Tebaldini, S.; Rocca, F.; Mariotti d’Alessandro, M.; Ferro-Famil, L. Phase Calibration of Airborne Tomographic SAR Data via Phase Center Double Localization. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1775–1792. [Google Scholar] [CrossRef]
- Ferro-Famil, L.; Tebaldini, S. ML Tomography Based on the MB RVoG Model: Optimal Estimation of a Covariance Matrix Structured as a Sum of Two Kronecker Products. In Proceedings of the POLinSAR 2013 Workshop, Frascati, Italy, 28 January–1 February 2013. [Google Scholar]
- Gini, F.; Lombardini, F. Multibaseline Cross-Track SAR Interferometry: A Signal Processing Perspective. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 71–93. [Google Scholar] [CrossRef]
- Polidori, L. Réflexions Sur La Qualité Des Modèles Numériques de Terrain. Bull. Soc. Française Photogrammétrie Télédétection 1995, 139, 10–19. [Google Scholar]
- El Hage, M. Etude de la Qualité Géomorphologique de Modèles Numériques de Terrain Issus de L’imagerie Spatiale. Ph.D. Thesis, CNAM, Paris, France, 2012. [Google Scholar]
- Polidori, L.; El Hage, M.; Valeriano, M.D.M. Digital Elevation Model Validation with No Ground Control: Application to the Topodata Dem in Brazil. Bol. Ciências Geodésicas 2014, 20, 467–479. [Google Scholar] [CrossRef]
- Polidori, L.; El Hage, M. Application de La Loi de Benford Au Contrôle de Qualité Des Modèles Numériques de Terrain. Rev. XYZ 2019, 158, 19–22. [Google Scholar]
- Temme, A.J.A.M.; Heuvelink, G.B.M.; Schoorl, J.M.; Claessens, L. Chapter 5 Geostatistical Simulation and Error Propagation in Geomorphometry. In Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Geomorphometry; Elsevier: Amsterdam, The Netherlands, 2009; Volume 33, pp. 121–140. [Google Scholar]
- MacMillan, R.A.; Shary, P.A. Chapter 9 Landforms and Landform Elements in Geomorphometry. In Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Geomorphometry; Elsevier: Amsterdam, The Netherlands, 2009; Volume 33, pp. 227–254. [Google Scholar]
- Holmes, K.W.; Chadwick, O.A.; Kyriakidis, P.C. Error in a USGS 30-Meter Digital Elevation Model and Its Impact on Terrain Modeling. J. Hydrol. 2000, 233, 154–173. [Google Scholar] [CrossRef]
- Shary, P.A.; Sharaya, L.S.; Mitusov, A.V. Fundamental Quantitative Methods of Land Surface Analysis. Geoderma 2002, 107, 1–32. [Google Scholar] [CrossRef]
- Heuvelink, G.B.M. Error Propagation in Environmental Modelling with GIS; Taylor and Francis: London, UK, 1998; ISBN 978-0-7484-0744-6. [Google Scholar]
- Schneider, B. On the Uncertainty of Local Shape of Lines and Surfaces. Cartogr. Geogr. Inf. Sci. 2001, 28, 237–247. [Google Scholar] [CrossRef]
- Wise, S. Assessing the quality for hydrological applications of digital elevation models derived from contours. Hydrol. Process. 2000, 14, 1909–1929. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, C.; Gold, C. Accuracy of Digital Terrain Models. In Digital Terrain Modeling Principles and Methodology; Taylor and Francis: New York, NY, USA, 2005; pp. 158–190. [Google Scholar]
- Hebeler, F.; Purves, R.S. The Influence of Elevation Uncertainty on Derivation of Topographic Indices. Geomorphology 2009, 111, 4–16. [Google Scholar] [CrossRef]
- Heuvelink, G.B.M. Analysing Uncertainty Propagation in GIS: Why Is It Not That Simple? In Uncertainty in Remote Sensing and GIS; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2002; pp. 155–165. ISBN 978-0-470-03526-9. [Google Scholar]
- Hunter, G.J.; Goodchild, M.F. Modeling the Uncertainty of Slope and Aspect Estimates Derived from Spatial Databases. Geogr. Anal. 1997, 29, 35–49. [Google Scholar] [CrossRef]
- Oksanen, J.; Sarjakoski, T. Error Propagation of DEM-Based Surface Derivatives. Comput. Geosci. 2005, 31, 1015–1027. [Google Scholar] [CrossRef]
- El Hage, M.; Simonetto, E.; Faour, G.; Polidori, L. Effect of Image-Matching Parameters and Local Morphology on the Geomorphological Quality of SPOT DEMs. Photogramm. Rec. 2017, 32, 255–275. [Google Scholar] [CrossRef]
- Toutin, T. Comparison of Stereo-Extracted DTM from Different High-Resolution Sensors: SPOT-5, EROS-a, IKONOS-II, and QuickBird. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2121–2129. [Google Scholar] [CrossRef]
- Gooch, M.J.; Chandler, J.H.; Stojic, M. Accuracy Assessment of Digital Elevation Models Generated Using the Erdas Imagine Orthomax Digital Photogrammetric System. Photogramm. Rec. 1999, 16, 519–531. [Google Scholar] [CrossRef]
- Lane, S.N.; James, T.D.; Crowell, M.D. Application of Digital Photogrammetry to Complex Topography for Geomorphological Research. Photogramm. Rec. 2000, 16, 793–821. [Google Scholar] [CrossRef]
- Toutin, T. Impact of Terrain Slope and Aspect on Radargrammetric DEM Accuracy. ISPRS J. Photogramm. Remote Sens. 2002, 57, 228–240. [Google Scholar] [CrossRef]
- Shary, P.A.; Sharaya, L.S.; Mitusov, A.V. The Problem of Scale-Specific and Scale-Free Approaches in Geomorphometry. Geogr. Fis. E Din. Quat. 2005, 28, 81–101. [Google Scholar]
- El Hage, M.; Simonetto, E.; Faour, G.; Polidori, L. Impact of DEM Reconstruction Parameters on Topographic Indices. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Paris, France, 1–3 September 2010; Volume XXXVIII, pp. 40–44. [Google Scholar]
- Santos, V.C.D.; Hage, M.E.; Polidori, L.; Stevaux, J.C. Effect of digital elevation model mesh size on geomorphic indices: A case study of the Ivaí River watershed—State of Paraná, Brazil. Bol. De Ciências Geodésicas 2017, 23, 684–699. [Google Scholar] [CrossRef]
- Evans, G.; Ramachandran, B.; Zhang, Z.; Bailey, B.; Cheng, P. An Accuracy Assessment of Cartosat-1 Stereo Image Data-Derived Digital Elevation Models: A Case Study of the Drum Mountains, Utah. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1161–1164. [Google Scholar]
- Hengl, T. Finding the Right Pixel Size. Comput. Geosci. 2006, 32, 1283–1298. [Google Scholar] [CrossRef]
- Shary, P.A. Models of Topography. Lecture Notes in Geoinformation and Cartography. In Advances in Digital Terrain Analysis; Zhou, Q., Lees, B., Tang, G., Eds.; Springer: Berlin, Heidelberg, 2008; pp. 29–57. ISBN 978-3-540-77800-4. [Google Scholar]
- Hengl, T.; Evans, I.S. Chapter 2 Mathematical and Digital Models of the Land Surface. In Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Geomorphometry; Elsevier: Amsterdam, The Netherlands, 2009; Volume 33, pp. 31–63. [Google Scholar]
- Burrough, P.A.; McDonnell, R.; McDonnell, R.A.; Lloyd, C.D. Principles of Geographical Information Systems; OUP Oxford: Oxford, UK, 2015; ISBN 978-0-19-874284-5. [Google Scholar]
- Rodríguez-Iturbe, I.; Rinaldo, A. Fractal River Basins: Chance and Self-Organization; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Gaucherel, C.; Frelat, R.; Salomon, L.; Rouy, B.; Pandey, N.; Cudennec, C. Regional Watershed Characterization and Classification with River Network Analyses. Earth Surf. Processes Landf. 2017, 42, 2068–2081. [Google Scholar] [CrossRef]
- Smessaert, M.; Villard, L.; Polidori, L.; Daniel, S.; Ferro-Famil, L. Improvement Prospects of DTM Reconstruction from P-Band SAR Tomography Over Tropical Dense Forests. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 1538–1541. [Google Scholar]
- Tobler, W.R. A Computer Movie Simulating Urban Growth in the Detroit Region. Econ. Geogr. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- Miller, H.J. Tobler’s First Law and Spatial Analysis. Ann. Assoc. Am. Geogr. 2004, 94, 284–289. [Google Scholar] [CrossRef]
- Toutin, T. Generation of DSMs from SPOT-5 in-Track HRS and across-Track HRG Stereo Data Using Spatiotriangulation and Autocalibration. ISPRS J. Photogramm. Remote Sens. 2006, 60, 170–181. [Google Scholar] [CrossRef]
- Papasaika, H.; Baltsavias, E. Investigations on the Relation of Geomorphological Parameters to DEM Accuracy. In Proceedings of the Geomorphometry Conference, Melbourne, Australia, 6–11 July 2009; pp. 162–168. [Google Scholar]
- Ruck, G.; Barrick, D.; Stuart, W. Radar Cross Section Handbook; Peninsula Publishing: Newport Beach, CA, USA, 2002. [Google Scholar]
- D’Alessandro, M.M.; Tebaldini, S.; Rocca, F. Phenomenology of Ground Scattering in a Tropical Forest Through Polarimetric Synthetic Aperture Radar Tomography. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4430–4437. [Google Scholar] [CrossRef]
- Abdo, R.; Ferro-Famil, L.; Boutet, F.; Allain-Bailhache, S. Analysis of the Double-Bounce Interaction between a Random Volume and an Underlying Ground, Using a Controlled High-Resolution PolTomoSAR Experiment. Remote Sens. 2021, 13, 636. [Google Scholar] [CrossRef]
- Huang, Y.; Ferro-Famil, L. 3-D Characterization of Urban Areas Using High-Resolution Polarimetric SAR Tomographic Techniques and a Minimal Number of Acquisitions. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9086–9103. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Percentage of Sinks (%) | 2.02% | |
|---|---|---|
| Depth of sinks | Mean (m) | 0.38 |
| Standard deviation (m) | 0.60 | |
| RMS (m) | 0.71 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Hage, M.; Villard, L.; Huang, Y.; Ferro-Famil, L.; Koleck, T.; Le Toan, T.; Polidori, L. Multicriteria Accuracy Assessment of Digital Elevation Models (DEMs) Produced by Airborne P-Band Polarimetric SAR Tomography in Tropical Rainforests. Remote Sens. 2022, 14, 4173. https://doi.org/10.3390/rs14174173
El Hage M, Villard L, Huang Y, Ferro-Famil L, Koleck T, Le Toan T, Polidori L. Multicriteria Accuracy Assessment of Digital Elevation Models (DEMs) Produced by Airborne P-Band Polarimetric SAR Tomography in Tropical Rainforests. Remote Sensing. 2022; 14(17):4173. https://doi.org/10.3390/rs14174173
Chicago/Turabian StyleEl Hage, Mhamad, Ludovic Villard, Yue Huang, Laurent Ferro-Famil, Thierry Koleck, Thuy Le Toan, and Laurent Polidori. 2022. "Multicriteria Accuracy Assessment of Digital Elevation Models (DEMs) Produced by Airborne P-Band Polarimetric SAR Tomography in Tropical Rainforests" Remote Sensing 14, no. 17: 4173. https://doi.org/10.3390/rs14174173
APA StyleEl Hage, M., Villard, L., Huang, Y., Ferro-Famil, L., Koleck, T., Le Toan, T., & Polidori, L. (2022). Multicriteria Accuracy Assessment of Digital Elevation Models (DEMs) Produced by Airborne P-Band Polarimetric SAR Tomography in Tropical Rainforests. Remote Sensing, 14(17), 4173. https://doi.org/10.3390/rs14174173