
Development Status and Service Performance Preliminary Analysis for BDSBAS

Abstract
:
1. Introduction
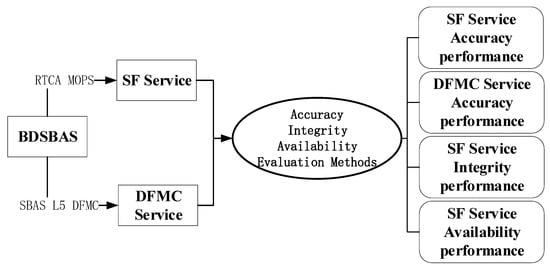
2. BDSBAS Architecture Overview
3. Message User Algorithms and Service Performance Evaluation Methods
3.1. Message User Algorithm
3.2. Service Integrity Evaluation Method
- (1)
- During the testing period, the starting and ending epochs are indicated as and , respectively, and the observation sampling interval is expressed as .
- (2)
- The position coordinates of the monitoring receivers are calculated with BDSBAS broadcast information. The deviation of the estimate coordinates from the true coordinates of the receivers are computed and divided into horizontal position errors (HPE) and vertical position errors (VPE). The time series of HPE and VPE are taken as the statistical samples.
- (3)
- The associated integrity messages of BDSBAS are used to compute the horizontal protection levels (HPL) and vertical protection levels (VPL) for the monitoring receivers.
- (4)
- At epoch , comparing the HPE value and HPL value against the horizontal alert limit (HAL) value. If the three values satisfy the relationship as HPL < HAL < HPE, it indicates a horizontal HMI event, is set equal to 1, otherwise, is set equal to 0. Meanwhile, comparing the VPE value, VPL value against the vertical alert limit (VAL) value, if the three values satisfy VPL < VAL < VPE, it indicates a vertical HMI event, and is set equal to 1, otherwise, is set equal to 0.
- (5)
- Using all the experimental samples, the probability of HMI of service integrity is determined as:
3.3. Service Availability Evaluation Method
- (1)
- During the testing period, the starting and ending epochs are indicated as and , respectively, and the observation sampling interval is expressed as .
- (2)
- The time series of receiver HPE and VPE are calculated with SBAS corrections and the corresponding HPL and VPL are determined with the SBAS integrity information.
- (3)
- At observation epoch , the receiver HPE and VPE are compared with the service horizontal accuracy threshold () and vertical accuracy threshold (), respectively, to determine the accuracy availability indicator at epoch .
- (4)
- The service integrity indicator is calculated as Equation (5). Considering both the service integrity indicator and accuracy availability indicator, the service availability is given by Equation (7):
4. BDSBAS Service Performance Evaluation
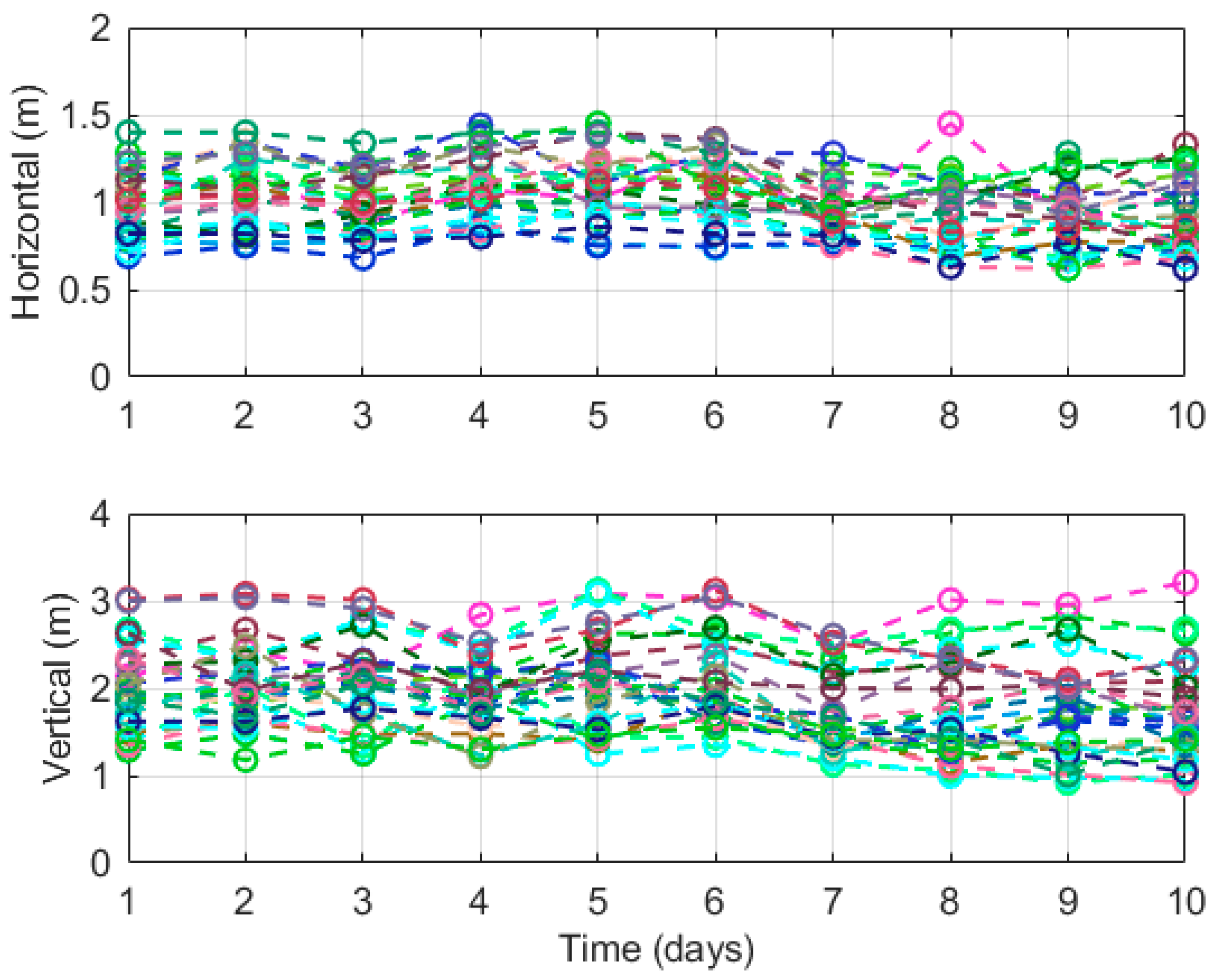
4.1. BDSBAS SF Service Accuracy
4.2. BDSBAS DFMC Service Accuracy
4.3. SF Service Integrity and Availability
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- FAA. Global Positioning System Wide Area Augmentation System (WAAS) Performance Standard, 1st ed.; FAA: Washington, WA, USA, 2008. [Google Scholar]
- Bunce, D. Wide Area Augmentation System (WAAS)—Program Update. In Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 2299–2326. [Google Scholar]
- Walter, T.; Shallberg, K.; Altshuler, E.; Wanner, W.; Harris, C.; Stimmler, R. WAAS at 15. Navigation 2018, 65, 581–600. [Google Scholar] [CrossRef]
- Sakai, T. MSAS Status. In Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 2343–2360. [Google Scholar]
- Kitamura, M.; Aso, T.; Sakai, T.; Hoshinoo, K. Development of Prototype Dual-frequency Multi-constellation SBAS for MSAS. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, September 25–29 2017; pp. 997–1007. [Google Scholar]
- Kitamura, M.; Sakai, T. DFMC SBAS Prototype System Performance Using Global Monitoring Stations of QZSS. In Proceedings of the ION 2019 Pacific PNT Meeting, Hawaii, HI, USA, 8–11 April 2019; pp. 382–387. [Google Scholar]
- Thomas, D. EGNOS V2 Program Update. In Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 2327–2342. [Google Scholar]
- Fielitz, K.; Meindl, Q.; Breitenacher, A.; Daubrawa, J.; Frankenberger, H.; Braun, R.; Schmitz-Peiffer, A.; Ridings, A.; Marcote, M.; Auz, A.; et al. New Integrity SBAS Test Bed NISTB—DFMC Simulation Results for EGNOS V3 services. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 2104–2118. [Google Scholar]
- Bauer, F.; Greze, G.; Haddad, F.; Tourtier, A.; Rols, B.; Urbanska, K. A Study on a New EGNOS V2 Release with Enhanced System Performances. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 902–919. [Google Scholar]
- Rao, K.N.S. GAGAN—The Indian satellite based augmentation system. Indian J. Radio Space Phys. 2007, 36, 293–302. [Google Scholar]
- Tsai, Y.-F.; Low, K.-S. Performance assessment on expanding SBAS service areas of GAGAN and MSAS to Singapore region. In Proceedings of the2014 IEEE/ION Position, Location and Navigation Symposium-PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 686–691. [Google Scholar]
- Karutin, S. SDCM grogram status. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 1034–1044. [Google Scholar]
- Karutin, S. SDCM development strategy. In Proceedings of the 23rd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2010), Nashville, TN, USA, 16–20 September 2013; pp. 2361–2372. [Google Scholar]
- Choy, S.; Kuckartz, J.; Dempster, A.G.; Rizos, C.; Higgins, M. GNSS satellite-based augmentation systems for Australia. GPS Solutions 2016, 21, 835–848. [Google Scholar] [CrossRef]
- RTCA. Minimum Operational Performance Standards for Global Positioning System/Satellite-Based Augmentation System Airborne Equipment; RTCA: Washington, DC, USA, 2013. [Google Scholar]
- IWG. SBAS L5 DFMC Interface Control Document (SBAS L5 DFMC ICD); IWG: Brussels, Belgium, 2016. [Google Scholar]
- ICAO. Annex 10 to the Convention on International Civil Aviation; ICAO: Montreal, QC, Canada, 2013; Volume 1. [Google Scholar]
- China Satellite Navigation Office. The Application Service Architecture of BeiDou Navigation Satellite System (Version 1.0); China Satellite Navigation Office: Beijing, China, 2019. [Google Scholar]
- China Satellite Navigation Office. BeiDou Navigation Satellite System Signal In Space Interface Control Document. Satellite Based Augmentation System Service Signal BDSBAS-B1C (Version 1.0); China Satellite Navigation Office: Beijing, China, 2020. [Google Scholar]
- Liu, C.; Gao, W.; Shao, B.; Lu, J.; Wang, W.; Chen, Y.; Su, C.; Xiong, S.; Ding, Q. Development of BeiDou Satellite-Based Augmentation System. Navigation 2021, 68, 405–417. [Google Scholar]
- Liu, Y.; Cao, Y.; Tang, C.; Chen, J.; Zhao, L.; Zhou, S.; Hu, X.; Tian, Q.; Yang, Y. Pseudorange Bias Analysis and Preliminary Service Performance Evaluation of BDSBAS. Remote Sens. 2021, 13, 4815. [Google Scholar] [CrossRef]
- Gao, W.; Cao, Y.; Liu, C.; Lu, J.; Shao, B.; Xiong, S.; Su, C. Construction Progress and Aviation Flight Test of BDSBAS. Remote Sens. 2022, 14, 1218. [Google Scholar] [CrossRef]
- Cao, Y.; Hu, X.; Zhou, J.; Wu, B.; Liu, L.; Zhou, S.; Su, R.; Chang, Z.; Wu, X. Kinematic Wide Area Differential Corrections for BeiDou Regional System Basing on Two-Way Time Synchronization. Lect. Notes Electr. Eng. 2014, 305, 277–288. [Google Scholar]
- Liu, J.-L.; Cao, Y.-L.; Hu, X.-G.; Tang, C.-P. Beidou wide-area augmentation system clock error correction and performance verification. Adv. Space Res. 2020, 65, 2348–2359. [Google Scholar] [CrossRef]
- Zhao, L.; Hu, X.; Tang, C.; Cao, Y.; Zhou, S.; Yang, Y.; Liu, L.; Guo, R. Generation of DFMC SBAS corrections for BDS-3 satellites and improved positioning performances. Adv. Space Res. 2020, 66, 702–714. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, J.; Hu, X.; He, F.; Bian, L.; Wang, W.; Wu, B.; Yu, Y.; Wang, J.; Tian, Q. Design of BDS-3 integrity monitoring and preliminary analysis of its performance. Adv. Space Res. 2019, 65, 1125–1138. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SF Service | DFMC Service | |
|---|---|---|
| Broadcast Signal | BDSBAS-B1C | BDSBAS-B2a |
| Broadcast Satellites | 3GEO | 3GEO |
| Augmentation constellation(s) | GPS | BDS/GPS/Galileo/GLONASS |
| SBAS Network Time | GPS Time | BDS Time |
| Clock and Ephemeris slow corrections | Broadcast | Broadcast |
| Clock fast corrections | Broadcast | Not Broadcast |
| Clock–Ephemeris correction integrity | Broadcast | Broadcast |
| Clock–Ephemeris covariance matrix | Broadcast | Broadcast |
| Ionospheric grid delay corrections and integrity | Broadcast | Not Broadcast |
| Degradation information | Broadcast | Broadcast |
| SBAS (GEO) satellites ephemeris and almanacs | Broadcast | Broadcast |
| Rcv ID | Horizontal (95%) | Vertical (95%) | Rcv ID | Horizontal (95%) | Vertical (95%) | ||||
|---|---|---|---|---|---|---|---|---|---|
| BDSBAS + GPS | GPS | BDSBAS + GPS | GPS | BDSBAS + GPS | GPS | BDSBAS + GPS | GPS | ||
| 1 | 0.769 | 1.699 | 1.837 | 2.488 | 16 | 1.129 | 1.631 | 2.662 | 3.039 |
| 2 | 0.744 | 1.688 | 1.739 | 2.477 | 17 | 0.865 | 1.629 | 2.503 | 2.708 |
| 3 | 1.101 | 1.693 | 2.444 | 3.727 | 18 | 1.197 | 1.480 | 1.910 | 2.451 |
| 4 | 0.964 | 1.538 | 1.398 | 2.773 | 19 | 1.022 | 1.980 | 2.358 | 3.157 |
| 5 | 0.961 | 1.558 | 1.338 | 2.840 | 20 | 1.048 | 1.910 | 2.072 | 2.868 |
| 6 | 1.071 | 1.977 | 2.736 | 3.304 | 21 | 1.039 | 1.414 | 1.617 | 2.654 |
| 7 | 1.085 | 2.147 | 2.270 | 3.254 | 22 | 1.120 | 1.396 | 1.686 | 2.668 |
| 8 | 1.116 | 1.495 | 1.829 | 2.424 | 23 | 1.101 | 1.689 | 2.107 | 2.675 |
| 9 | 0.971 | 1.531 | 1.823 | 2.479 | 24 | 1.025 | 1.665 | 1.931 | 2.716 |
| 10 | 0.962 | 1.574 | 1.451 | 2.791 | 25 | 0.806 | 1.588 | 1.559 | 2.915 |
| 11 | 0.972 | 1.524 | 1.393 | 2.782 | 26 | 0.773 | 1.595 | 1.526 | 2.972 |
| 12 | 0.794 | 1.526 | 1.331 | 2.806 | 27 | 1.234 | 1.593 | 1.682 | 2.265 |
| 13 | 1.129 | 1.651 | 1.600 | 2.619 | 28 | 1.192 | 1.644 | 1.393 | 2.600 |
| 14 | 0.849 | 1.668 | 1.782 | 2.617 | 29 | 0.970 | 1.633 | 2.656 | 3.964 |
| 15 | 0.841 | 1.662 | 1.868 | 2.752 | 30 | 1.197 | 1.631 | 2.656 | 4.060 |
| Mean | 1.00 | 1.65 | 1.91 | 2.86 | |||||
| Rcv ID | Horizontal (95%) | Vertical (95%) | Rcv ID | Horizontal (95%) | Vertical (95%) | ||||
|---|---|---|---|---|---|---|---|---|---|
| BDSBAS + BDS | BDS | BDSBAS + BDS | BDS | BDSBAS + BDS | BDS | BDSBAS + BDS | BDS | ||
| 1 | 0.558 | 0.765 | 1.050 | 1.176 | 16 | 0.677 | 0.931 | 1.237 | 1.377 |
| 2 | 0.365 | 0.642 | 0.733 | 1.079 | 17 | 0.741 | 0.928 | 1.263 | 1.469 |
| 3 | 0.571 | 0.758 | 1.140 | 1.485 | 18 | 0.552 | 0.844 | 1.025 | 1.392 |
| 4 | 0.547 | 0.748 | 1.186 | 1.507 | 19 | 0.515 | 0.737 | 1.085 | 1.379 |
| 5 | 0.423 | 0.649 | 1.001 | 1.353 | 20 | 0.560 | 0.706 | 1.210 | 1.455 |
| 6 | 0.539 | 0.784 | 1.259 | 1.537 | 21 | 0.480 | 0.653 | 0.987 | 1.403 |
| 7 | 0.624 | 0.892 | 1.277 | 1.606 | 22 | 0.679 | 0.845 | 1.089 | 1.361 |
| 8 | 0.834 | 1.023 | 1.333 | 1.537 | 23 | 0.676 | 0.835 | 1.158 | 1.343 |
| 9 | 0.503 | 0.730 | 0.830 | 1.144 | 24 | 0.526 | 0.701 | 1.140 | 1.400 |
| 10 | 0.758 | 0.904 | 1.322 | 1.459 | 25 | 0.552 | 0.756 | 1.031 | 1.395 |
| 11 | 0.508 | 0.708 | 1.066 | 1.307 | 26 | 0.659 | 0.855 | 1.333 | 1.706 |
| 12 | 0.503 | 0.754 | 0.896 | 1.287 | 27 | 0.467 | 0.716 | 1.176 | 1.343 |
| 13 | 0.572 | 0.715 | 0.981 | 1.244 | 28 | 0.704 | 0.859 | 1.092 | 1.314 |
| 14 | 0.586 | 0.767 | 0.965 | 1.298 | 29 | 0.725 | 0.915 | 1.259 | 1.342 |
| 15 | 0.881 | 1.133 | 1.203 | 1.520 | 30 | 0.571 | 0.789 | 0.981 | 1.200 |
| Mean | 0.60 | 0.80 | 1.11 | 1.38 | |||||
| RcvID | Availability | RcvID | Availability |
|---|---|---|---|
| 1 | 0.995 | 16 | 0.995 |
| 2 | 0.999 | 17 | 0.995 |
| 3 | 0.984 | 18 | 0.995 |
| 4 | 0.984 | 19 | 0.944 |
| 5 | 0.926 | 20 | 0.961 |
| 6 | 0.934 | 21 | 0.993 |
| 7 | 0.981 | 22 | 0.914 |
| 8 | 0.989 | 23 | 0.988 |
| 9 | 0.991 | 24 | 0.973 |
| 10 | 0.995 | 25 | 0.976 |
| 11 | 0.993 | 26 | 0.995 |
| 12 | 0.994 | 27 | 0.995 |
| 13 | 0.983 | 28 | 0.994 |
| 14 | 0.978 | 29 | 0.979 |
| 15 | 0.995 | 30 | 0.982 |
| Average value | 0.98 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Chen, J.; Liu, L.; Hu, X.; Liu, Y.; Xin, J.; Zhao, L.; Tian, Q.; Zhou, S.; Wu, B. Development Status and Service Performance Preliminary Analysis for BDSBAS. Remote Sens. 2022, 14, 4314. https://doi.org/10.3390/rs14174314
Cao Y, Chen J, Liu L, Hu X, Liu Y, Xin J, Zhao L, Tian Q, Zhou S, Wu B. Development Status and Service Performance Preliminary Analysis for BDSBAS. Remote Sensing. 2022; 14(17):4314. https://doi.org/10.3390/rs14174314
Chicago/Turabian StyleCao, Yueling, Jinping Chen, Li Liu, Xiaogong Hu, Yuchen Liu, Jie Xin, Liqian Zhao, Qiuning Tian, Shanshi Zhou, and Bin Wu. 2022. "Development Status and Service Performance Preliminary Analysis for BDSBAS" Remote Sensing 14, no. 17: 4314. https://doi.org/10.3390/rs14174314
APA StyleCao, Y., Chen, J., Liu, L., Hu, X., Liu, Y., Xin, J., Zhao, L., Tian, Q., Zhou, S., & Wu, B. (2022). Development Status and Service Performance Preliminary Analysis for BDSBAS. Remote Sensing, 14(17), 4314. https://doi.org/10.3390/rs14174314